- Устройство управления шаговым двигателем

Содержание
- 2. Принцип работы шагового двигателя. Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором
- 3. Описание Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из
- 4. Использование В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200
- 5. Преимущества и недостатки Преимущества Главное преимущество шаговых приводов — точность. При подаче потенциалов на обмотки шаговый
- 6. Контроллер L297 и L298
- 7. Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и L298N
- 8. Технические характеристики контроллера шаговых двигателей на L297 и L298
- 10. Скачать презентацию
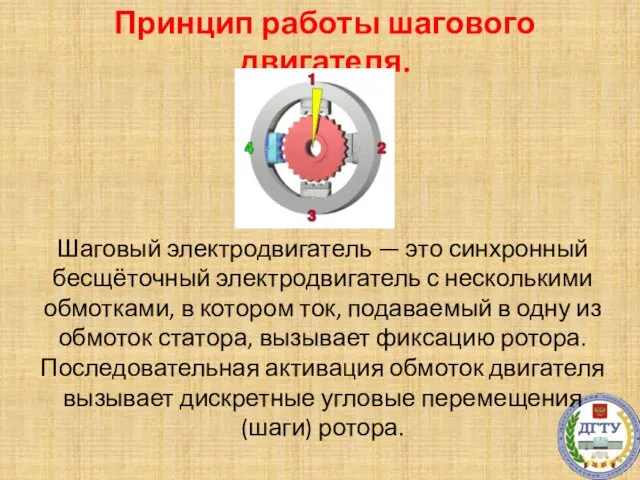
Принцип работы шагового двигателя.
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с
Принцип работы шагового двигателя.
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с
Описание
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения,
Описание
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения,
Использование
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с
Использование
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с
Преимущества и недостатки
Преимущества
Главное преимущество шаговых приводов — точность. При подаче потенциалов
Преимущества и недостатки
Преимущества
Главное преимущество шаговых приводов — точность. При подаче потенциалов

Контроллер L297 и L298
Контроллер L297 и L298

Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и
Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и
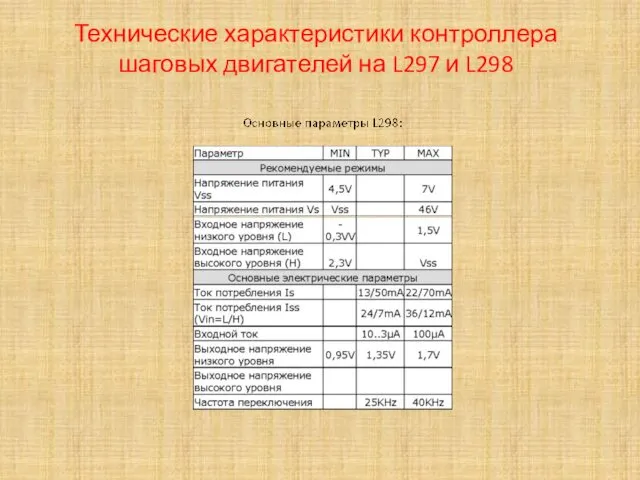
Технические характеристики контроллера шаговых двигателей на L297 и L298
Технические характеристики контроллера шаговых двигателей на L297 и L298
 Лечение эпилепсии. Фармакотерапия
Лечение эпилепсии. Фармакотерапия Владимир Красное Солнышко
Владимир Красное Солнышко Обследование пассажиропотоков в городах .Неравномерность перевозок
Обследование пассажиропотоков в городах .Неравномерность перевозок Управление транспортными системами. Грузовые перевозки
Управление транспортными системами. Грузовые перевозки Подбор контрацептивного препарата
Подбор контрацептивного препарата В гостях у сказки
В гостях у сказки Жанры изобразительного искусства
Жанры изобразительного искусства Факоматозы. Наследственные нейрокожные заболевания
Факоматозы. Наследственные нейрокожные заболевания Модель психологической службы в организациях образования РК
Модель психологической службы в организациях образования РК Культурные ландшафты России
Культурные ландшафты России Постпозитивизм К. Поппера. И. Лакатос
Постпозитивизм К. Поппера. И. Лакатос Благодарность, смысл жизни. Сочинение на ОГЭ-2017. (Задание 15.3)
Благодарность, смысл жизни. Сочинение на ОГЭ-2017. (Задание 15.3) Двенадцатипульсовые схемы управляемых выпрямителей
Двенадцатипульсовые схемы управляемых выпрямителей Устройство и ремонт асинхронного электродвигателя с короткозамкнутым ротором
Устройство и ремонт асинхронного электродвигателя с короткозамкнутым ротором Учебный мини-проект на уроке технологии Магнит в подарок бабушке и дедушке
Учебный мини-проект на уроке технологии Магнит в подарок бабушке и дедушке Экологический урок Свобода от отходов
Экологический урок Свобода от отходов Презентация о российский поэте, драматурге, педагоге РУБИНСКОМ КОНСТАНТИНЕ СЕРГЕЕВИЧЕ
Презентация о российский поэте, драматурге, педагоге РУБИНСКОМ КОНСТАНТИНЕ СЕРГЕЕВИЧЕ Работа системы управления Turbotronic 4
Работа системы управления Turbotronic 4 Жидкие вещества
Жидкие вещества Учись разгадывать ребусы. Приёмы разгадывания.
Учись разгадывать ребусы. Приёмы разгадывания. Революция в россии - революция в живописи. Красный: философия цвета
Революция в россии - революция в живописи. Красный: философия цвета Физминутка для глаз.
Физминутка для глаз. Применение дальтон технологии в решении проектных задач Саблина С А
Применение дальтон технологии в решении проектных задач Саблина С А Топливно-энергетический комплекс России
Топливно-энергетический комплекс России Оптимизация добычи скважинной продукции путем подбора рациональной технологии и борьбы с осложнениями
Оптимизация добычи скважинной продукции путем подбора рациональной технологии и борьбы с осложнениями Материаловедение. Теория сплавов. (Тема 6)
Материаловедение. Теория сплавов. (Тема 6) Скажем НЕТ наркотикам!
Скажем НЕТ наркотикам! Скрипты продаж для мебели
Скрипты продаж для мебели