- Вспомогательные алгоритмы. Движение робота по квадрату

Содержание
- 2. Движение робота по «квадрату» Блок движение использовался 8 раз. Для движения робота вперед и поворота на
- 3. Вложенный цикл Цикл называет вложенным, если он размещается внутри другого цикла.
- 4. Вспомогательный алгоритм Это алгоритм, оформленный так, что он может вызываться и использоваться в другом алгоритме. Свойства
- 5. Создание вспомогательных алгоритмов
- 6. Создание вспомогательных алгоритмов
- 7. Создание вспомогательных алгоритмов Вспомогательный алгоритм стал доступен в полной палитре в группе Мои блоки
- 8. Вид программы со вспомогательным алгоритмом
- 9. Задание 1 Составьте программу для движения робота по траектории «восьмерка», используя вспомогательные алгоритмы (Мои блоки).
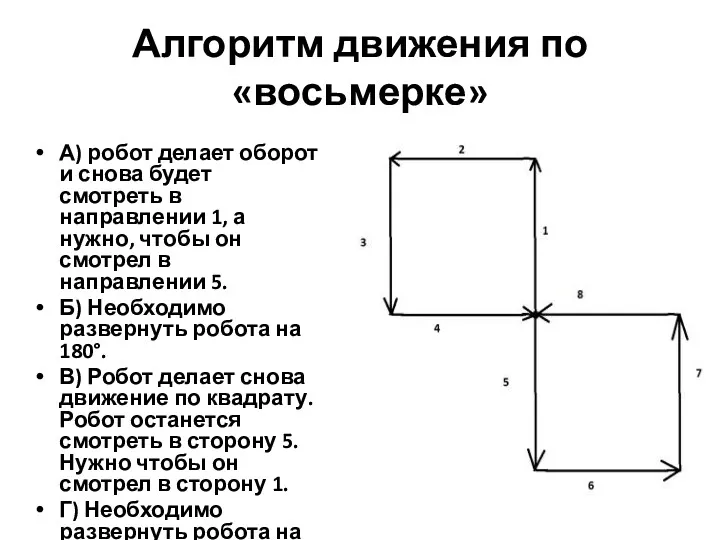
- 10. Алгоритм движения по «восьмерке» А) робот делает оборот и снова будет смотреть в направлении 1, а
- 11. Программа движения робота по «восьмерке»
- 12. Задание 2 Сделать для робота приборную панель, которая будет отображать количество оборотов за одну минуту (об/мин).
- 13. Алгоритм действий Включить двигатели на 10 секунд. Считать показания с датчика оборотов. Умножить это значение на
- 14. Программа «Тахометр»
- 16. Скачать презентацию
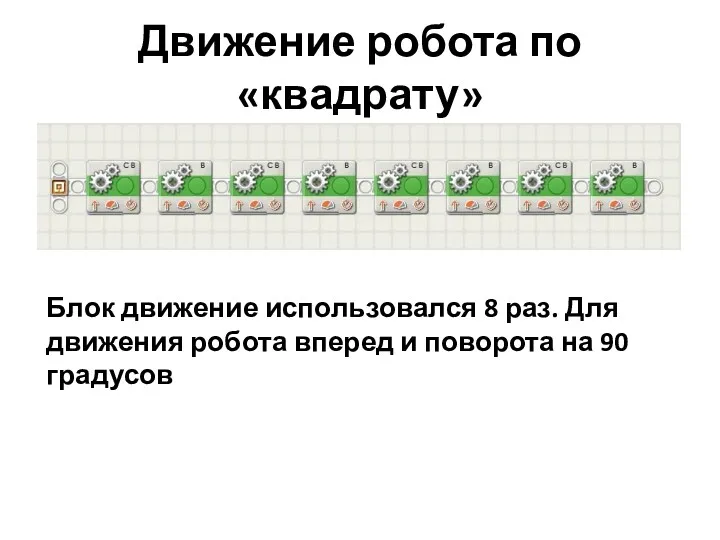
Движение робота по «квадрату»
Блок движение использовался 8 раз. Для движения робота
Движение робота по «квадрату»
Блок движение использовался 8 раз. Для движения робота

Вложенный цикл
Цикл называет вложенным, если он размещается внутри другого цикла.
Вложенный цикл
Цикл называет вложенным, если он размещается внутри другого цикла.
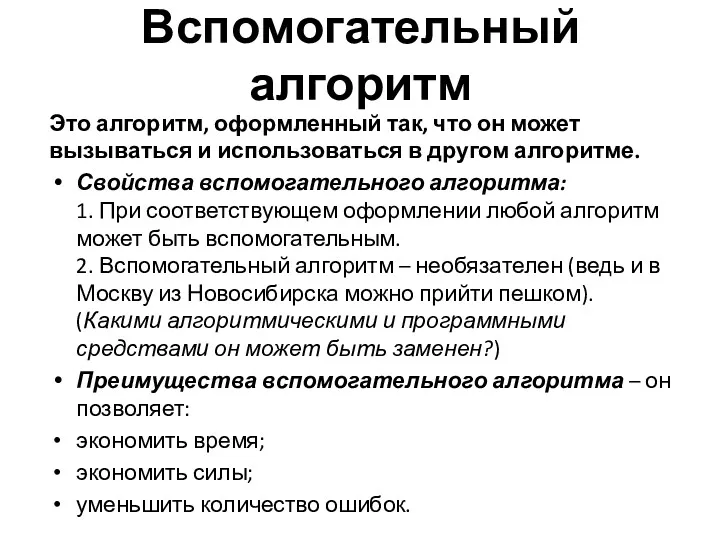
Вспомогательный алгоритм
Это алгоритм, оформленный так, что он может вызываться и использоваться
Вспомогательный алгоритм
Это алгоритм, оформленный так, что он может вызываться и использоваться
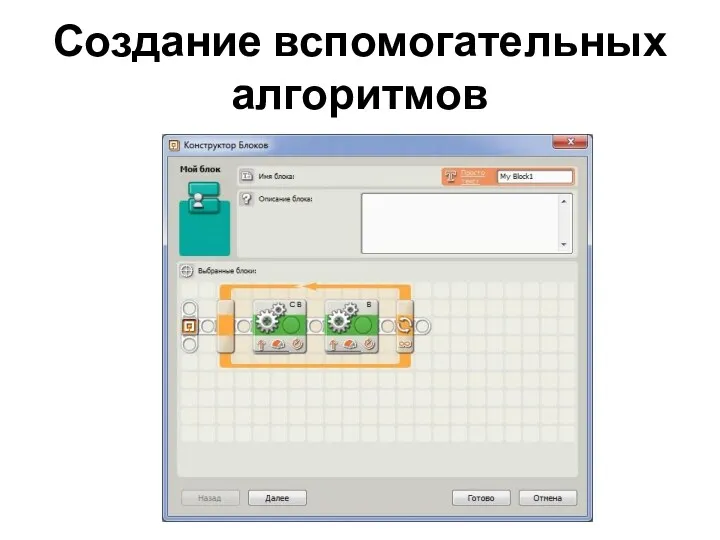
Создание вспомогательных алгоритмов
Создание вспомогательных алгоритмов
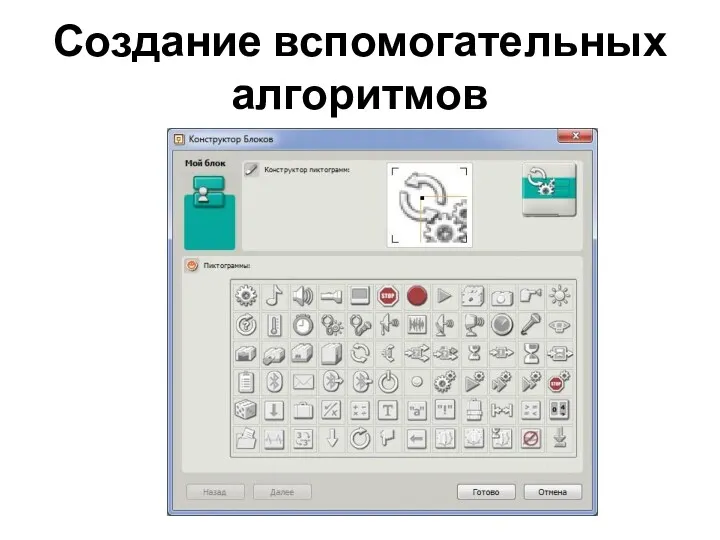
Создание вспомогательных алгоритмов
Создание вспомогательных алгоритмов
Создание вспомогательных алгоритмов
Вспомогательный алгоритм стал доступен в полной палитре в группе
Создание вспомогательных алгоритмов
Вспомогательный алгоритм стал доступен в полной палитре в группе

Вид программы со вспомогательным алгоритмом
Вид программы со вспомогательным алгоритмом
Задание 1
Составьте программу для движения робота по траектории «восьмерка», используя вспомогательные
Задание 1
Составьте программу для движения робота по траектории «восьмерка», используя вспомогательные
Алгоритм движения по «восьмерке»
А) робот делает оборот и снова будет смотреть
Алгоритм движения по «восьмерке»
А) робот делает оборот и снова будет смотреть

Программа движения робота по «восьмерке»
Программа движения робота по «восьмерке»
Задание 2
Сделать для робота приборную панель, которая будет отображать количество оборотов
Задание 2
Сделать для робота приборную панель, которая будет отображать количество оборотов
Алгоритм действий
Включить двигатели на 10 секунд.
Считать показания с датчика оборотов.
Умножить это
Алгоритм действий
Включить двигатели на 10 секунд.
Считать показания с датчика оборотов.
Умножить это
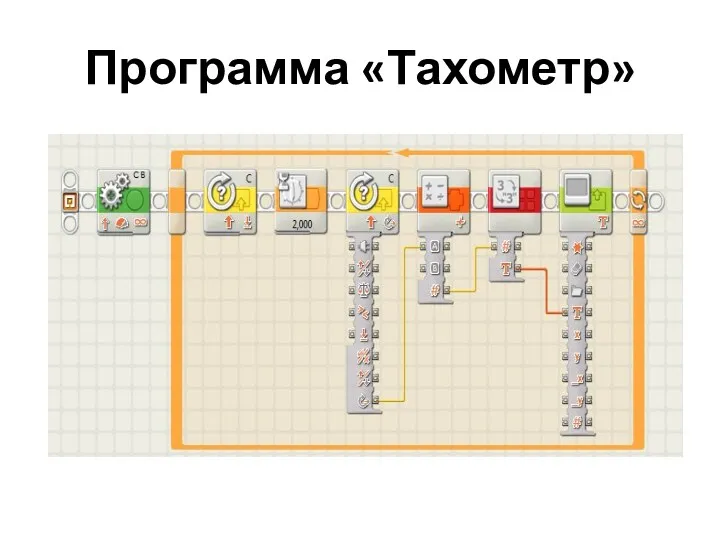
Программа «Тахометр»
Программа «Тахометр»
 Античная философия
Античная философия Anatomie a fyziologie rostlin
Anatomie a fyziologie rostlin Организация ЭВМ и систем. Переход от CISC к чертам RISC архитектуры в семействе IA32. (Лекция 6)
Организация ЭВМ и систем. Переход от CISC к чертам RISC архитектуры в семействе IA32. (Лекция 6) Особые типы магматических формаций. Формации расслоенных интрузивов ультраосновных и основных пород
Особые типы магматических формаций. Формации расслоенных интрузивов ультраосновных и основных пород Электронное портфолио
Электронное портфолио Технологическое оборудование и и нвентарь
Технологическое оборудование и и нвентарь Дворцовая электростанция в Царском Селе
Дворцовая электростанция в Царском Селе Лекция 1: Введение в дисциплину Направляющие системы телекоммуникаций
Лекция 1: Введение в дисциплину Направляющие системы телекоммуникаций Презентации Диск
Презентации Диск Служба психолого-педагогического сопровождения в условиях современной школы интернатного типа.
Служба психолого-педагогического сопровождения в условиях современной школы интернатного типа. Методические рекомендации по подготовке проекта к конкурсу Мир театра
Методические рекомендации по подготовке проекта к конкурсу Мир театра Презентация Нет друга, ищи, а нашел, так береги к занятию по теме Дружба
Презентация Нет друга, ищи, а нашел, так береги к занятию по теме Дружба Мой опыт использования разнообразных форм работы с родителями
Мой опыт использования разнообразных форм работы с родителями ОГЭ по биологии 2020. Выполнение задания №26
ОГЭ по биологии 2020. Выполнение задания №26 Валеологический проект Здоровичок
Валеологический проект Здоровичок Космическая математика Викторина
Космическая математика Викторина Презентация к уроку технологии по теме: Архитектурная керамика. Изразец 4 класс
Презентация к уроку технологии по теме: Архитектурная керамика. Изразец 4 класс Профилактика и коррекция дисграфии на почве нарушения фонемного распознавания. Дифференциация Б-Т.
Профилактика и коррекция дисграфии на почве нарушения фонемного распознавания. Дифференциация Б-Т. Загальні принципи анестезіологічного забезпечення оперативних втручань
Загальні принципи анестезіологічного забезпечення оперативних втручань Snow Globe
Snow Globe Реализация приоритетного проекта Безопасные и качественные дороги в Кировской городской агломерации
Реализация приоритетного проекта Безопасные и качественные дороги в Кировской городской агломерации презентация Канада
презентация Канада Внеклассное мероприятие Права ребенка
Внеклассное мероприятие Права ребенка организация самооценки И ДОМАШНИХ ЗАДАНИЙ учащихся
организация самооценки И ДОМАШНИХ ЗАДАНИЙ учащихся Классный час Дружба каждому нужна
Классный час Дружба каждому нужна fedfd-38682f58
fedfd-38682f58 Мыши водят хоровод
Мыши водят хоровод Простое глагольное сказуемое
Простое глагольное сказуемое