- Введение в мультимедийные базы данных

Содержание
- 2. Пространственные базы данных Основные характеристики: Представление пространственных объектов в геометрическом пространстве (обычно двух- или трехмерном) Форма
- 3. Моделирование пространства 1) Объектные (object-based) модели пространства Компоненты пространственных объектов: Идентификационная информация Описание Пространственная протяженность Классификация
- 4. Моделирование пространства б) Одномерные объекты = линейные объекты Например, дороги на картах Основной геометрический объект –
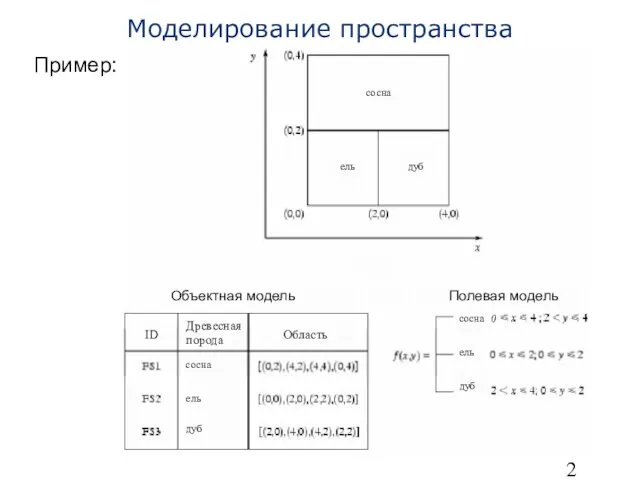
- 5. Моделирование пространства 2) Полевые (field-based) модели пространства Пространственная информация задается непрерывным1 полем значений, т.е. с помощью
- 6. Моделирование пространства Пример:
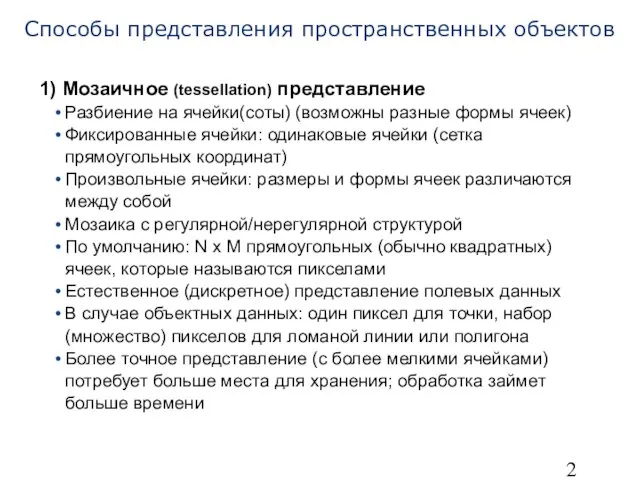
- 7. Способы представления пространственных объектов 1) Мозаичное (tessellation) представление Разбиение на ячейки(соты) (возможны разные формы ячеек) Фиксированные
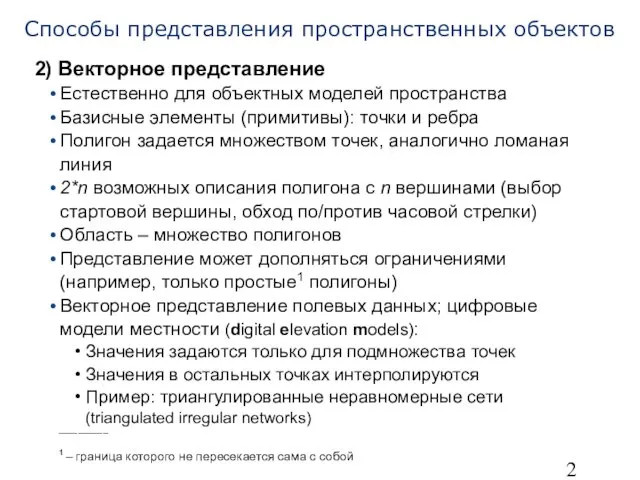
- 8. Способы представления пространственных объектов 2) Векторное представление Естественно для объектных моделей пространства Базисные элементы (примитивы): точки
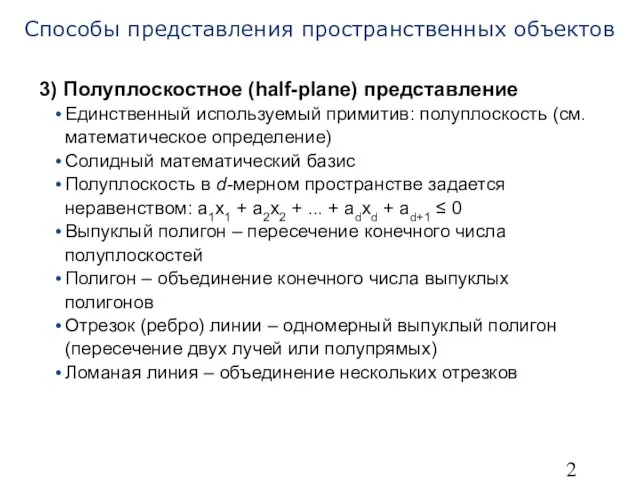
- 9. Способы представления пространственных объектов 3) Полуплоскостное (half-plane) представление Единственный используемый примитив: полуплоскость (см.математическое определение) Солидный математический
- 10. Вычислительная геометрия Алгоритмическая техника для выполнения операций в пространственных базах данных 1) Инкрементные алгоритмы Решить задачу
- 11. Вычислительная геометрия Иллюстрация к инкрементному нахождению выпуклой оболочки: (1) (2) (3) (4) (5)
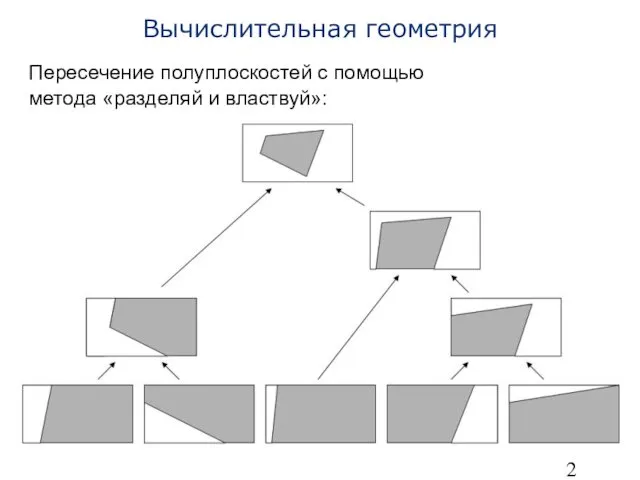
- 12. Вычислительная геометрия 2) Стратегия «разделяй и властвуй» «Разделяй»: задача рекурсивно разбивается на несколько легко решаемых подзадач
- 13. Вычислительная геометрия Пересечение полуплоскостей с помощью метода «разделяй и властвуй»:
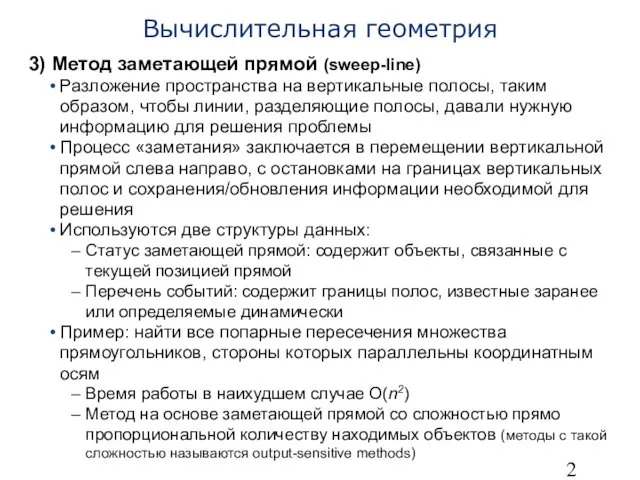
- 14. Вычислительная геометрия 3) Метод заметающей прямой (sweep-line) Разложение пространства на вертикальные полосы, таким образом, чтобы линии,
- 15. Вычислительная геометрия Алгоритм нахождения пересекающихся прямоугольников: begin Отсортировать 2n нижние и верхние x-координаты прямоугольников и поместить
- 16. Вычислительная геометрия Метод заметающей прямой для нахождения пересекающихся прямоугольников:
- 17. Вычислительная геометрия Типичные задачи вычислительной геометрии: Расположение точки относительно полигона (внутри или вне) Пересечение отрезков прямых
- 18. Хранение и извлечение пространственных объектов Общие замечания: Работа с произвольными фигурами затруднительна ⇒ Рассматривают минимальные ограничивающие
- 19. Хранение и извлечение пространственных объектов Минимальные ограничивающие прямоугольники :
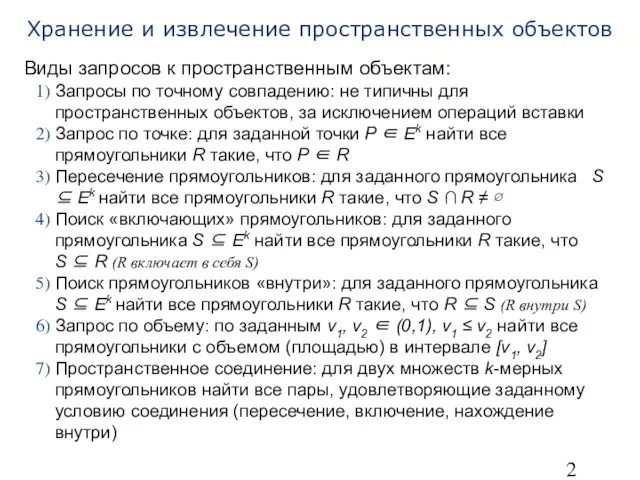
- 20. Хранение и извлечение пространственных объектов Виды запросов к пространственным объектам: Запросы по точному совпадению: не типичны
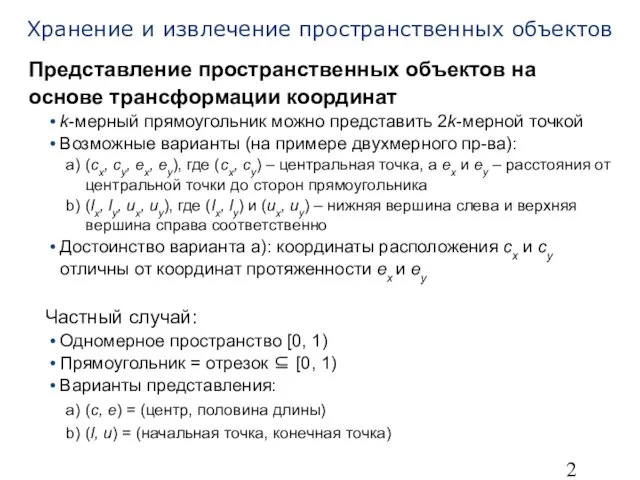
- 21. Хранение и извлечение пространственных объектов Представление пространственных объектов на основе трансформации координат k-мерный прямоугольник можно представить
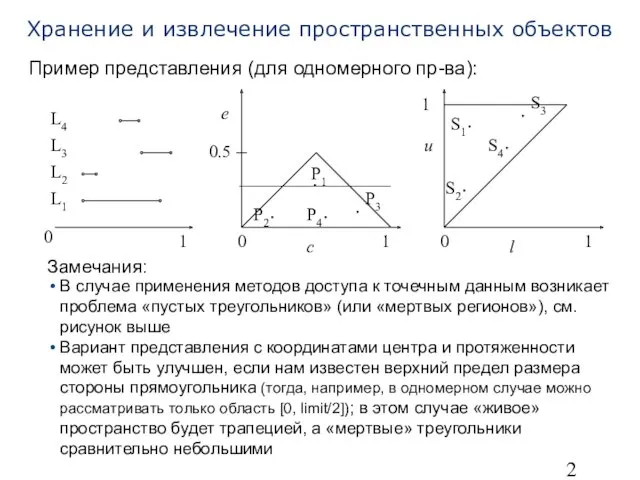
- 22. Хранение и извлечение пространственных объектов Пример представления (для одномерного пр-ва): Замечания: В случае применения методов доступа
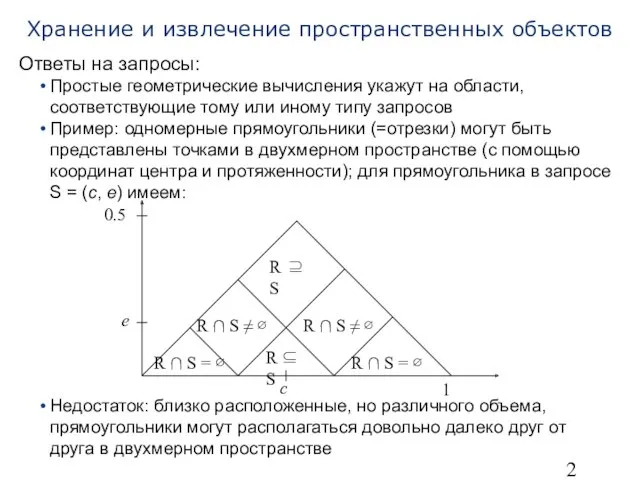
- 23. Хранение и извлечение пространственных объектов Ответы на запросы: Простые геометрические вычисления укажут на области, соответствующие тому
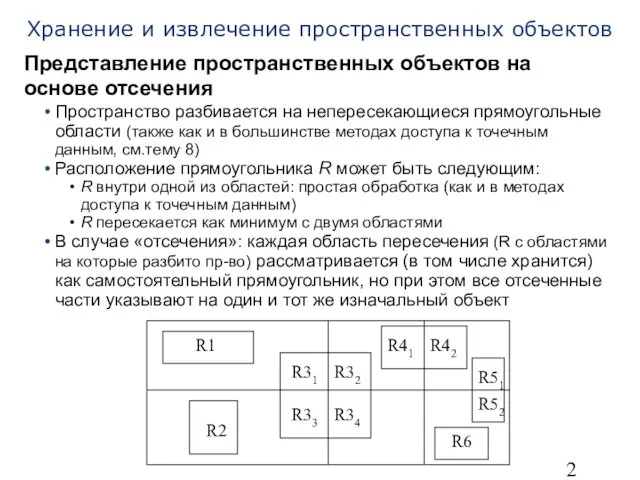
- 24. Хранение и извлечение пространственных объектов Представление пространственных объектов на основе отсечения Пространство разбивается на непересекающиеся прямоугольные
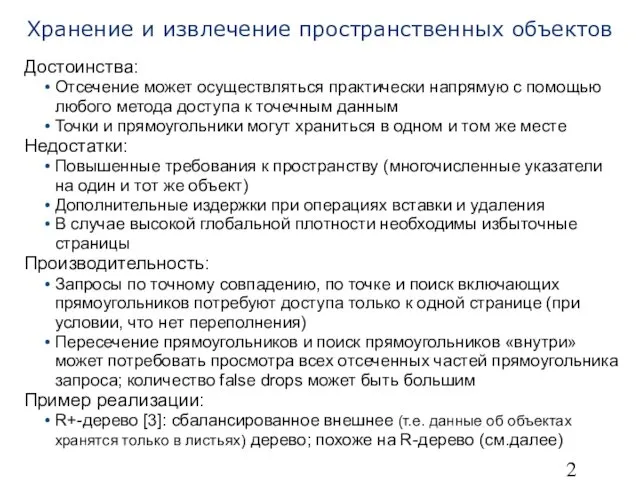
- 25. Хранение и извлечение пространственных объектов Достоинства: Отсечение может осуществляться практически напрямую с помощью любого метода доступа
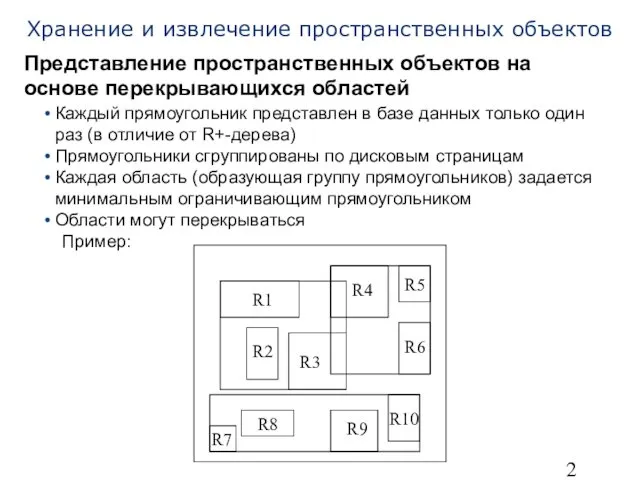
- 26. Хранение и извлечение пространственных объектов Представление пространственных объектов на основе перекрывающихся областей Каждый прямоугольник представлен в
- 27. Хранение и извлечение пространственных объектов Потенциальные недостатки: Высокая степень перекрытия ухудшает производительность Степень перекрытия MBR’ов может
- 28. R-деревья Индекс на основе перекрывающихся областей - R-дерево [4] (rectangle tree): Сбалансированная динамическая внешняя древовидная структура,
- 29. R-деревья Пример R-дерева: R10 R1 R2 R3 R4 R5 R6 R7 R8 R9 R11 R12 R13
- 30. R-деревья Обработка запросов: Запрос по точке: найти объекты, содержащие заданную точку Начиная с корня, рекурсивно просматриваем
- 31. R-деревья Вставка в R-дерево: Используя процедуру ChooseLeaf (см.след.слайд), найти лист L для вставляемого прямоугольника R Если
- 32. R-деревья Процедура ChooseLeaf: Начать с корневого узла (= N) Если N является листом, вернуть N Просмотреть
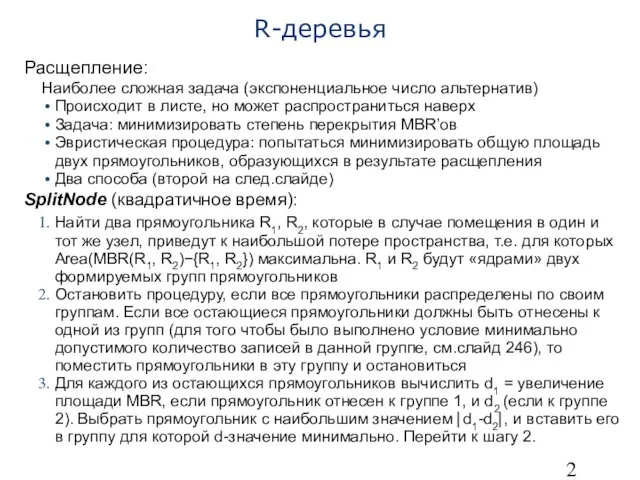
- 33. R-деревья Расщепление: Наиболее сложная задача (экспоненциальное число альтернатив) Происходит в листе, но может распространиться наверх Задача:
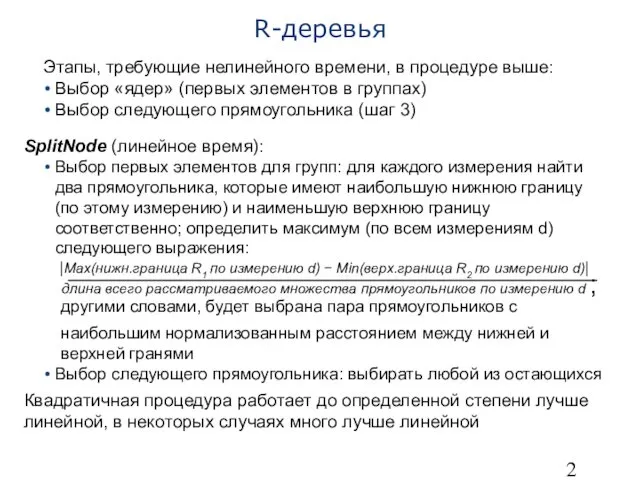
- 34. R-деревья Этапы, требующие нелинейного времени, в процедуре выше: Выбор «ядер» (первых элементов в группах) Выбор следующего
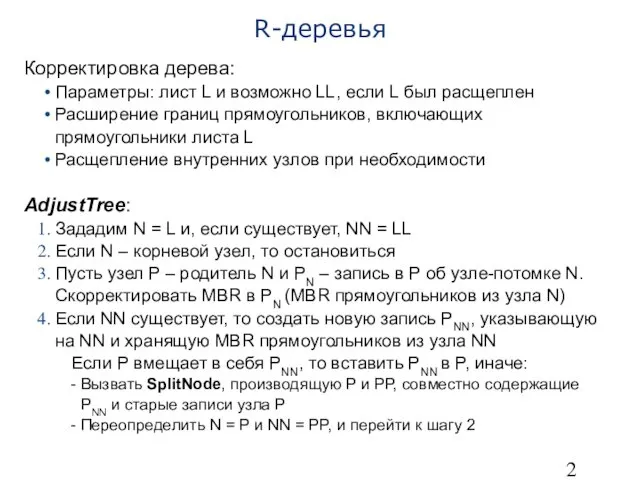
- 35. R-деревья Корректировка дерева: Параметры: лист L и возможно LL, если L был расщеплен Расширение границ прямоугольников,
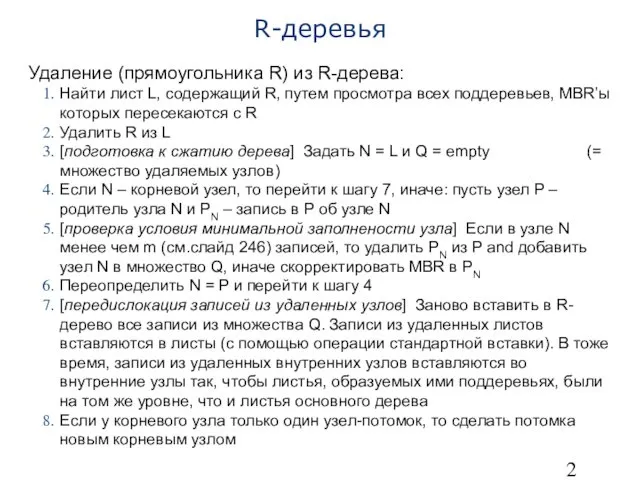
- 36. R-деревья Удаление (прямоугольника R) из R-дерева: Найти лист L, содержащий R, путем просмотра всех поддеревьев, MBR’ы
- 37. R-деревья R*-дерево [5]: улучшенная версия R-дерева Откладывает расщепление путем принудительной вставки: Сортировка всех прямоугольников на основе
- 38. R-деревья X-дерево [6]: Может хранить точечные и пространственные данные Превосходит R*-деревья, TV-деревья, и ряд других структур,
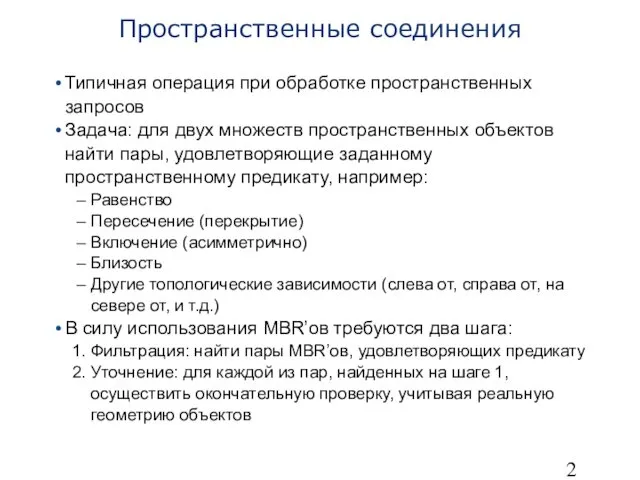
- 39. Пространственные соединения Типичная операция при обработке пространственных запросов Задача: для двух множеств пространственных объектов найти пары,
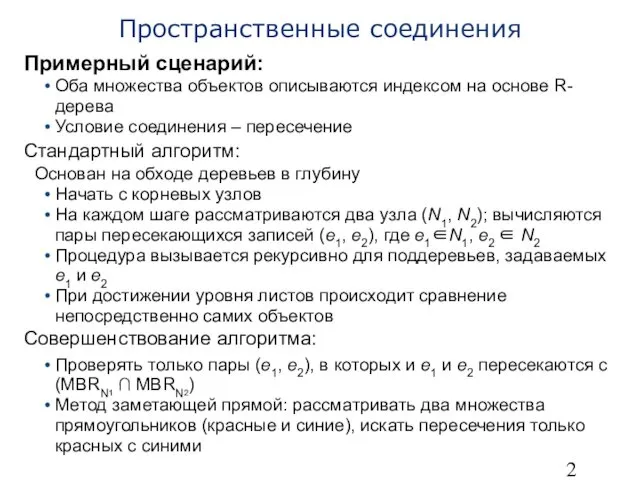
- 40. Пространственные соединения Примерный сценарий: Оба множества объектов описываются индексом на основе R-дерева Условие соединения – пересечение
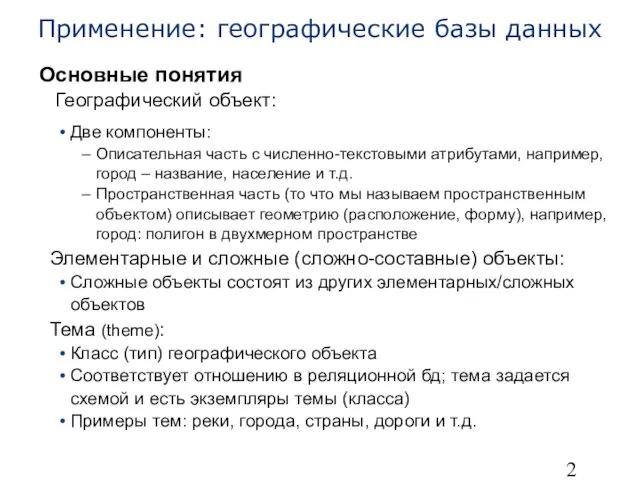
- 41. Применение: географические базы данных Основные понятия Географический объект: Две компоненты: Описательная часть с численно-текстовыми атрибутами, например,
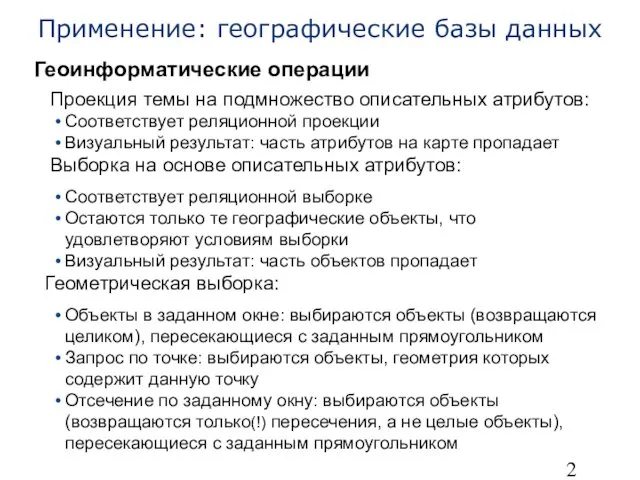
- 42. Применение: географические базы данных Геоинформатические операции Проекция темы на подмножество описательных атрибутов: Соответствует реляционной проекции Визуальный
- 43. Применение: географические базы данных Объединение тем: Соответствует реляционному объединению Объединяет две темы, имеющие одинаковые схемы Наложение
- 44. Применение: географические базы данных Геопространственные СУБД 1) Специализированные геоинформационные СУБД ArcInfo: Задумана как набор инструментальных средств
- 45. Применение: географические базы данных PostgreSQL: Объектно-реляционная СУБД Свободно распространяемая, открытый код Расширенные возможности: Геометрические типы: точка,
- 46. Упражнения Рассмотрим простой (см.слайды «Вычислительная геометрия» для определения простого полигона) полигон в двухмерном пр-ве, задаваемый списком
- 48. Скачать презентацию
Пространственные базы данных
Основные характеристики:
Представление пространственных объектов в геометрическом пространстве (обычно
Пространственные базы данных
Основные характеристики:
Представление пространственных объектов в геометрическом пространстве (обычно
Моделирование пространства
1) Объектные (object-based) модели пространства
Компоненты пространственных объектов:
Идентификационная информация
Описание
Пространственная протяженность
Моделирование пространства
1) Объектные (object-based) модели пространства
Компоненты пространственных объектов:
Идентификационная информация
Описание
Пространственная протяженность
Моделирование пространства
б) Одномерные объекты = линейные объекты
Например, дороги на картах
Основной
Моделирование пространства
б) Одномерные объекты = линейные объекты
Например, дороги на картах
Основной
Моделирование пространства
2) Полевые (field-based) модели пространства
Пространственная информация задается непрерывным1 полем значений,
Моделирование пространства
2) Полевые (field-based) модели пространства
Пространственная информация задается непрерывным1 полем значений,
Моделирование пространства
Пример:
Моделирование пространства
Пример:
Способы представления пространственных объектов
1) Мозаичное (tessellation) представление
Разбиение на ячейки(соты) (возможны
Способы представления пространственных объектов
1) Мозаичное (tessellation) представление
Разбиение на ячейки(соты) (возможны
Способы представления пространственных объектов
2) Векторное представление
Естественно для объектных моделей пространства
Базисные
Способы представления пространственных объектов
2) Векторное представление
Естественно для объектных моделей пространства
Базисные
Способы представления пространственных объектов
3) Полуплоскостное (half-plane) представление
Единственный используемый примитив: полуплоскость
Способы представления пространственных объектов
3) Полуплоскостное (half-plane) представление
Единственный используемый примитив: полуплоскость
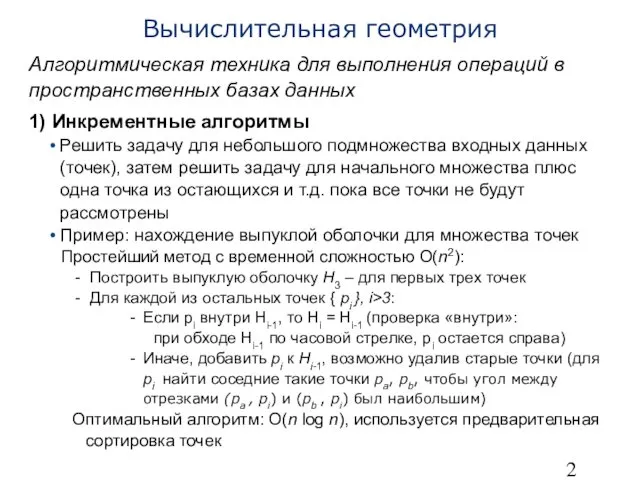
Вычислительная геометрия
Алгоритмическая техника для выполнения операций в пространственных базах данных
1) Инкрементные
Вычислительная геометрия
Алгоритмическая техника для выполнения операций в пространственных базах данных
1) Инкрементные
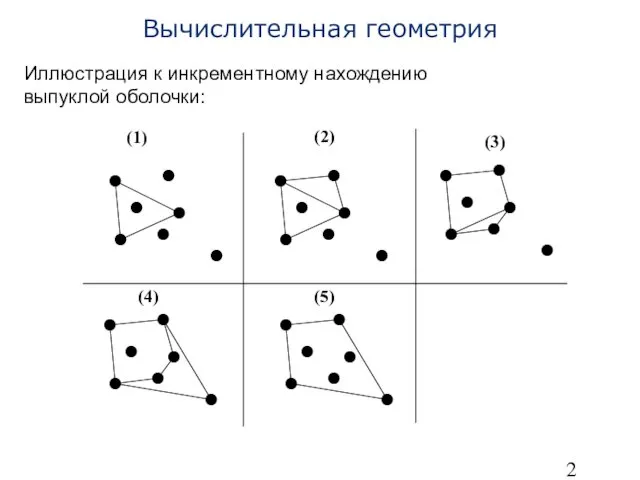
Вычислительная геометрия
Иллюстрация к инкрементному нахождению выпуклой оболочки:
(1)
(2)
(3)
(4)
(5)
Вычислительная геометрия
Иллюстрация к инкрементному нахождению выпуклой оболочки:
(1)
(2)
(3)
(4)
(5)

Вычислительная геометрия
2) Стратегия «разделяй и властвуй»
«Разделяй»: задача рекурсивно разбивается на несколько
Вычислительная геометрия
2) Стратегия «разделяй и властвуй»
«Разделяй»: задача рекурсивно разбивается на несколько
Вычислительная геометрия
Пересечение полуплоскостей с помощью
метода «разделяй и властвуй»:
Вычислительная геометрия
Пересечение полуплоскостей с помощью
метода «разделяй и властвуй»:
Вычислительная геометрия
3) Метод заметающей прямой (sweep-line)
Разложение пространства на вертикальные полосы, таким
Вычислительная геометрия
3) Метод заметающей прямой (sweep-line)
Разложение пространства на вертикальные полосы, таким
Вычислительная геометрия
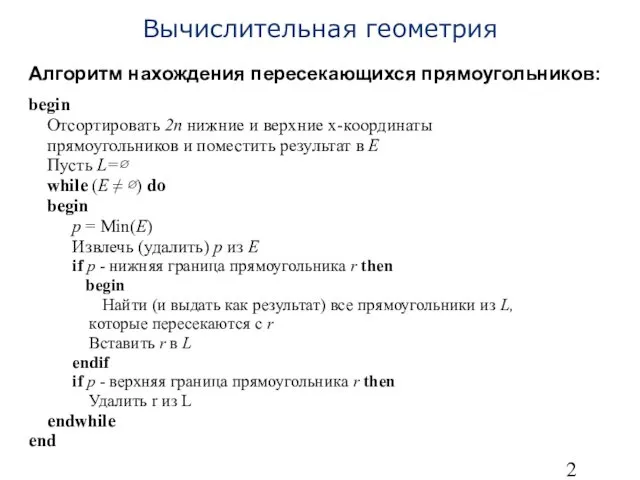
Алгоритм нахождения пересекающихся прямоугольников:
begin
Отсортировать 2n нижние и верхние x-координаты
прямоугольников
Вычислительная геометрия
Алгоритм нахождения пересекающихся прямоугольников:
begin
Отсортировать 2n нижние и верхние x-координаты
прямоугольников
Вычислительная геометрия
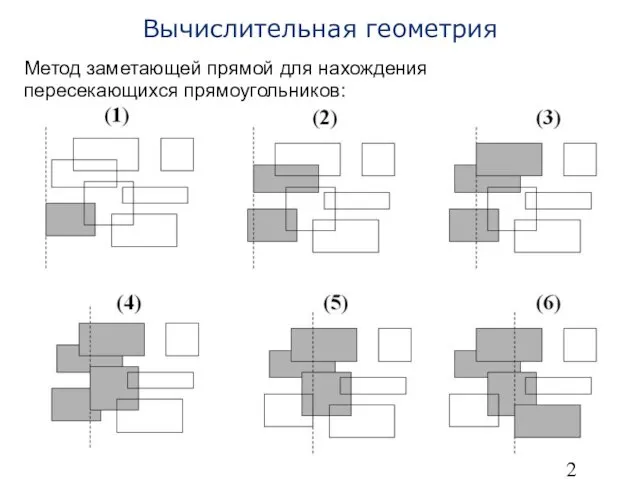
Метод заметающей прямой для нахождения
пересекающихся прямоугольников:
Вычислительная геометрия
Метод заметающей прямой для нахождения
пересекающихся прямоугольников:
Вычислительная геометрия
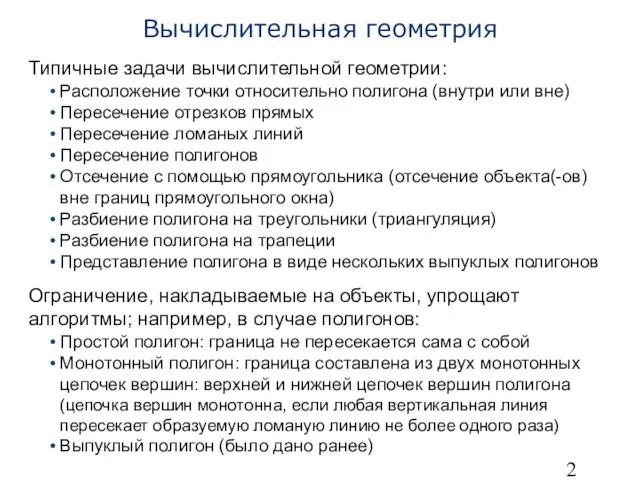
Типичные задачи вычислительной геометрии:
Расположение точки относительно полигона (внутри или вне)
Пересечение
Вычислительная геометрия
Типичные задачи вычислительной геометрии:
Расположение точки относительно полигона (внутри или вне)
Пересечение
Хранение и извлечение пространственных объектов
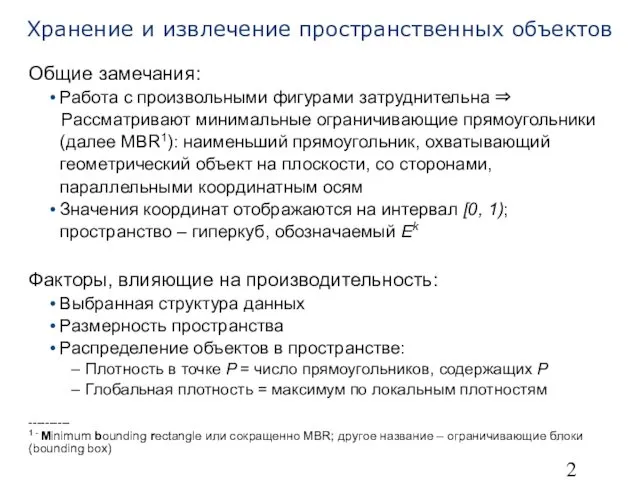
Общие замечания:
Работа с произвольными фигурами затруднительна ⇒
Хранение и извлечение пространственных объектов
Общие замечания:
Работа с произвольными фигурами затруднительна ⇒

Хранение и извлечение пространственных объектов
Минимальные ограничивающие прямоугольники :
Хранение и извлечение пространственных объектов
Минимальные ограничивающие прямоугольники :
Хранение и извлечение пространственных объектов
Виды запросов к пространственным объектам:
Запросы по точному
Хранение и извлечение пространственных объектов
Виды запросов к пространственным объектам:
Запросы по точному
Хранение и извлечение пространственных объектов
Представление пространственных объектов на основе трансформации координат
k-мерный
Хранение и извлечение пространственных объектов
Представление пространственных объектов на основе трансформации координат
k-мерный
Хранение и извлечение пространственных объектов
Пример представления (для одномерного пр-ва):
Замечания:
В случае применения
Хранение и извлечение пространственных объектов
Пример представления (для одномерного пр-ва):
Замечания:
В случае применения
Хранение и извлечение пространственных объектов
Ответы на запросы:
Простые геометрические вычисления укажут на
Хранение и извлечение пространственных объектов
Ответы на запросы:
Простые геометрические вычисления укажут на
Хранение и извлечение пространственных объектов
Представление пространственных объектов на основе отсечения
Пространство разбивается
Хранение и извлечение пространственных объектов
Представление пространственных объектов на основе отсечения
Пространство разбивается
Хранение и извлечение пространственных объектов
Достоинства:
Отсечение может осуществляться практически напрямую с помощью
Хранение и извлечение пространственных объектов
Достоинства:
Отсечение может осуществляться практически напрямую с помощью
Хранение и извлечение пространственных объектов
Представление пространственных объектов на основе перекрывающихся областей
Каждый
Хранение и извлечение пространственных объектов
Представление пространственных объектов на основе перекрывающихся областей
Каждый
Хранение и извлечение пространственных объектов
Потенциальные недостатки:
Высокая степень перекрытия ухудшает производительность
Степень перекрытия
Хранение и извлечение пространственных объектов
Потенциальные недостатки:
Высокая степень перекрытия ухудшает производительность
Степень перекрытия
![R-деревья Индекс на основе перекрывающихся областей - R-дерево [4] (rectangle](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/61518/slide-27.jpg)
R-деревья
Индекс на основе перекрывающихся областей - R-дерево [4] (rectangle tree):
Сбалансированная динамическая
R-деревья
Индекс на основе перекрывающихся областей - R-дерево [4] (rectangle tree):
Сбалансированная динамическая
R-деревья
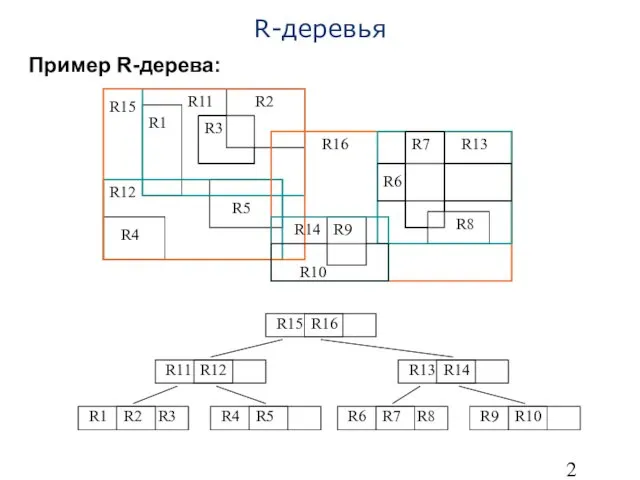
Пример R-дерева:
R10
R1
R2
R3
R4
R5
R6
R7
R8
R9
R11
R12
R13
R14
R15
R16
R-деревья
Пример R-дерева:
R10
R1
R2
R3
R4
R5
R6
R7
R8
R9
R11
R12
R13
R14
R15
R16
R-деревья
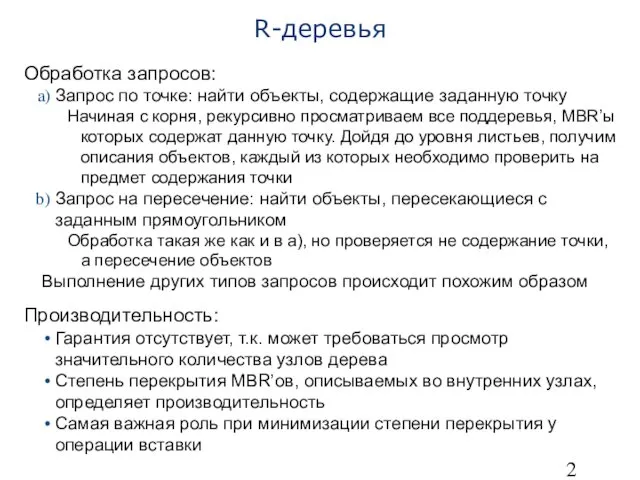
Обработка запросов:
Запрос по точке: найти объекты, содержащие заданную точку
Начиная с корня,
R-деревья
Обработка запросов:
Запрос по точке: найти объекты, содержащие заданную точку
Начиная с корня,
R-деревья
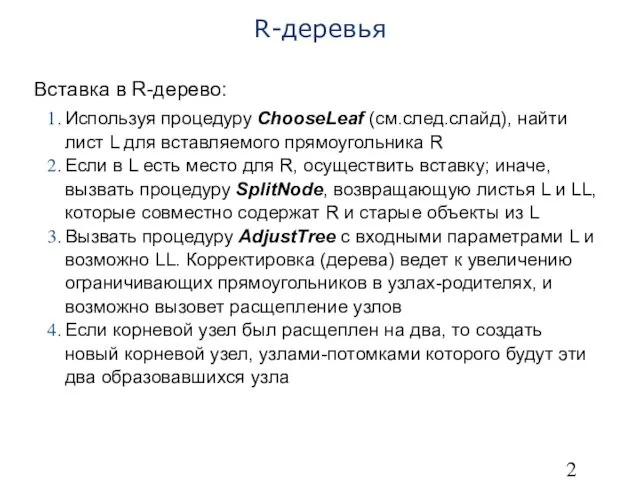
Вставка в R-дерево:
Используя процедуру ChooseLeaf (см.след.слайд), найти лист L для вставляемого
R-деревья
Вставка в R-дерево:
Используя процедуру ChooseLeaf (см.след.слайд), найти лист L для вставляемого
R-деревья
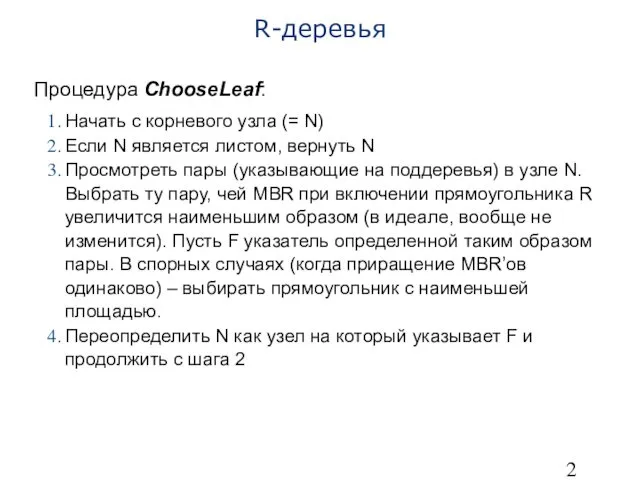
Процедура ChooseLeaf:
Начать с корневого узла (= N)
Если N является листом, вернуть
R-деревья
Процедура ChooseLeaf:
Начать с корневого узла (= N)
Если N является листом, вернуть
R-деревья
Расщепление:
Наиболее сложная задача (экспоненциальное число альтернатив)
Происходит в листе, но может распространиться
R-деревья
Расщепление:
Наиболее сложная задача (экспоненциальное число альтернатив)
Происходит в листе, но может распространиться
R-деревья
Этапы, требующие нелинейного времени, в процедуре выше:
Выбор «ядер» (первых элементов
R-деревья
Этапы, требующие нелинейного времени, в процедуре выше:
Выбор «ядер» (первых элементов
R-деревья
Корректировка дерева:
Параметры: лист L и возможно LL, если L был расщеплен
Расширение
R-деревья
Корректировка дерева:
Параметры: лист L и возможно LL, если L был расщеплен
Расширение
R-деревья
Удаление (прямоугольника R) из R-дерева:
Найти лист L, содержащий R, путем просмотра
R-деревья
Удаление (прямоугольника R) из R-дерева:
Найти лист L, содержащий R, путем просмотра
![R-деревья R*-дерево [5]: улучшенная версия R-дерева Откладывает расщепление путем принудительной](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/61518/slide-36.jpg)
R-деревья
R*-дерево [5]: улучшенная версия R-дерева
Откладывает расщепление путем принудительной вставки:
Сортировка всех прямоугольников
R-деревья
R*-дерево [5]: улучшенная версия R-дерева
Откладывает расщепление путем принудительной вставки:
Сортировка всех прямоугольников
![R-деревья X-дерево [6]: Может хранить точечные и пространственные данные Превосходит](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/61518/slide-37.jpg)
R-деревья
X-дерево [6]:
Может хранить точечные и пространственные данные
Превосходит R*-деревья, TV-деревья, и ряд
R-деревья
X-дерево [6]:
Может хранить точечные и пространственные данные
Превосходит R*-деревья, TV-деревья, и ряд
Пространственные соединения
Типичная операция при обработке пространственных запросов
Задача: для двух множеств пространственных
Пространственные соединения
Типичная операция при обработке пространственных запросов
Задача: для двух множеств пространственных
Пространственные соединения
Примерный сценарий:
Оба множества объектов описываются индексом на основе R-дерева
Условие соединения
Пространственные соединения
Примерный сценарий:
Оба множества объектов описываются индексом на основе R-дерева
Условие соединения
Применение: географические базы данных
Основные понятия
Географический объект:
Две компоненты:
Описательная часть с численно-текстовыми
Применение: географические базы данных
Основные понятия
Географический объект:
Две компоненты:
Описательная часть с численно-текстовыми
Применение: географические базы данных
Геоинформатические операции
Проекция темы на подмножество описательных атрибутов:
Соответствует
Применение: географические базы данных
Геоинформатические операции
Проекция темы на подмножество описательных атрибутов:
Соответствует
Применение: географические базы данных
Объединение тем:
Соответствует реляционному объединению
Объединяет две темы, имеющие
Применение: географические базы данных
Объединение тем:
Соответствует реляционному объединению
Объединяет две темы, имеющие
Применение: географические базы данных
Геопространственные СУБД
1) Специализированные геоинформационные СУБД
ArcInfo:
Задумана как набор
Применение: географические базы данных
Геопространственные СУБД
1) Специализированные геоинформационные СУБД
ArcInfo:
Задумана как набор
Применение: географические базы данных
PostgreSQL:
Объектно-реляционная СУБД
Свободно распространяемая, открытый код
Расширенные возможности:
Геометрические типы: точка,
Применение: географические базы данных
PostgreSQL:
Объектно-реляционная СУБД
Свободно распространяемая, открытый код
Расширенные возможности:
Геометрические типы: точка,
Упражнения
Рассмотрим простой (см.слайды «Вычислительная геометрия» для определения простого полигона) полигон в
Упражнения
Рассмотрим простой (см.слайды «Вычислительная геометрия» для определения простого полигона) полигон в
 : Новогодние игрушки – шарики, хлопушки!!!
: Новогодние игрушки – шарики, хлопушки!!! Дорожная карта по управляемому перетоку работников компании
Дорожная карта по управляемому перетоку работников компании Пешеходная улица в Сыктывкаре
Пешеходная улица в Сыктывкаре Презентация Реакции замещения, 8 класс
Презентация Реакции замещения, 8 класс Перспективные технологии и материалы XXI века
Перспективные технологии и материалы XXI века Сочинение по картине М.А.Врубеля Царевна-лебедь
Сочинение по картине М.А.Врубеля Царевна-лебедь Игровая презентация Репка Часть 1
Игровая презентация Репка Часть 1 Проект Скоро в школу!
Проект Скоро в школу! Изделия из жести
Изделия из жести Niedrożność jelit
Niedrożność jelit Развивающая предметно-пространственная среда по физическому развитию детей дошкольного возраста
Развивающая предметно-пространственная среда по физическому развитию детей дошкольного возраста Электронно-дырочный переход
Электронно-дырочный переход Решение задач по теории вероятностей
Решение задач по теории вероятностей Туберкулинодиагностика. Туберкулиндік сынамаларды орындау әдістері мен техникасы
Туберкулинодиагностика. Туберкулиндік сынамаларды орындау әдістері мен техникасы Мы - граждане России
Мы - граждане России Изображение на координатной плоскости множества решений уравнений и неравенств с двумя переменными и их систем
Изображение на координатной плоскости множества решений уравнений и неравенств с двумя переменными и их систем Текстовые редакторы. Урок 10
Текстовые редакторы. Урок 10 Авиационная, высотная, космическая физиология. Особенности адаптации человека к условиям космоса
Авиационная, высотная, космическая физиология. Особенности адаптации человека к условиям космоса Средства тиражирования документов
Средства тиражирования документов День лингвиста
День лингвиста Фрезерование. Обработка канавок
Фрезерование. Обработка канавок Искусство Древней Руси
Искусство Древней Руси Лики материнской любви. Роль матери в воспитании ребенка
Лики материнской любви. Роль матери в воспитании ребенка Нахождение значений дробных выражений. 6 класс
Нахождение значений дробных выражений. 6 класс Эмоциональное воспитание дошкольников
Эмоциональное воспитание дошкольников Электронное портфолио студента
Электронное портфолио студента Идентификация и воздействие на человека вредных и опасных факторов
Идентификация и воздействие на человека вредных и опасных факторов Светофор и я. Правила дорожного движения для дошкольников
Светофор и я. Правила дорожного движения для дошкольников