- Введение в профильную подготовку

Содержание
- 2. Изучаемые дисциплины
- 3. Мехатроника. Основные понятия Мехатроника — область науки и техники, основанная на синергетическом объединении узлов точной механики
- 4. Объект движения (объект управления) Структурная схема исполнительной системы Механическая передача Двигатель Электронный силовой модуль управления Измерители
- 5. Основные особенности традиционного проектирования исполнительной системы последовательная схема проектирования; разработка проводится группой узкоспециализи-рованных специалистов; использование стандартных
- 6. Исполнительная система в виде мехатронного модуля Мехатронный модуль — функционально и конструктивно самостоятельное изделие для реализации
- 7. Конструктивная схема мехатронного модуля движения
- 8. Основные особенности мехатронной исполнительной системы параллельная схема проектирования; разработка проводится специалистами в области мехатронных систем; абсолютная
- 9. Для мехатроники характерно стремление к полной интеграции механических узлов, электрических машин, силовой электроники, программируемых контроллеров.
- 10. Робототехника. Основные понятия Робототехника (от «робот» и «техника»; англ. robotics — роботика, роботехника) — прикладная наука,
- 11. Робот (robot, от robota — «подневольный труд») — автоматическое устройство, созданное по принципу живого организма, предназначенное
- 12. Основные типы роботов Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в
- 13. Обобщенная структурная схема робота Информационно-управляющая система Полезная нагрузка Исполнительные системы (мехатронные модули) Информационные (сенсорные) системы Бортовой
- 14. Кафедра СМ11 Подводные аппараты и роботы
- 15. Кафедра «Автоматические приводы» М-7 1985 г. Образование кафедры «Промышленные робототехнические системы». Сейчас «Робототехнические системы» РК-10 1987
- 16. Изучаемые дисциплины
- 17. Учебная подготовка
- 19. Скачать презентацию
Изучаемые дисциплины
Изучаемые дисциплины
Мехатроника.
Основные понятия
Мехатроника — область науки и техники, основанная на синергетическом объединении
Мехатроника.
Основные понятия
Мехатроника — область науки и техники, основанная на синергетическом объединении
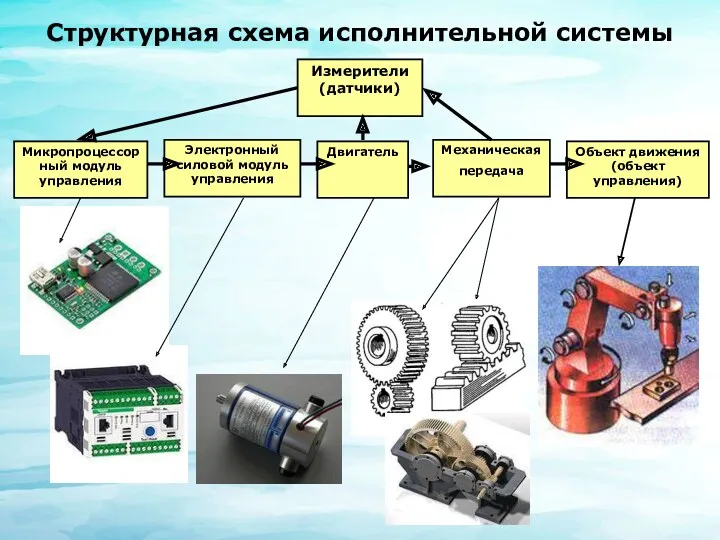
Объект движения (объект управления)
Структурная схема исполнительной системы
Механическая
передача
Двигатель
Электронный силовой модуль управления
Измерители
Объект движения (объект управления)
Структурная схема исполнительной системы
Механическая
передача
Двигатель
Электронный силовой модуль управления
Измерители
Основные особенности традиционного проектирования исполнительной системы
последовательная схема проектирования;
разработка проводится группой узкоспециализи-рованных
Основные особенности традиционного проектирования исполнительной системы
последовательная схема проектирования;
разработка проводится группой узкоспециализи-рованных

Исполнительная система в виде мехатронного модуля
Мехатронный модуль — функционально и конструктивно
Исполнительная система в виде мехатронного модуля
Мехатронный модуль — функционально и конструктивно

Конструктивная схема мехатронного модуля движения
Конструктивная схема мехатронного модуля движения
Основные особенности
мехатронной исполнительной системы
параллельная схема проектирования;
разработка проводится специалистами в области
Основные особенности
мехатронной исполнительной системы
параллельная схема проектирования;
разработка проводится специалистами в области

Для мехатроники характерно стремление к полной интеграции механических узлов, электрических машин,
Для мехатроники характерно стремление к полной интеграции механических узлов, электрических машин,
Робототехника.
Основные понятия
Робототехника (от «робот» и «техника»; англ. robotics — роботика, роботехника) —
Робототехника.
Основные понятия
Робототехника (от «робот» и «техника»; англ. robotics — роботика, роботехника) —
Робот (robot, от robota — «подневольный труд») — автоматическое устройство, созданное по
Робот (robot, от robota — «подневольный труд») — автоматическое устройство, созданное по

Основные типы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая
Основные типы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая
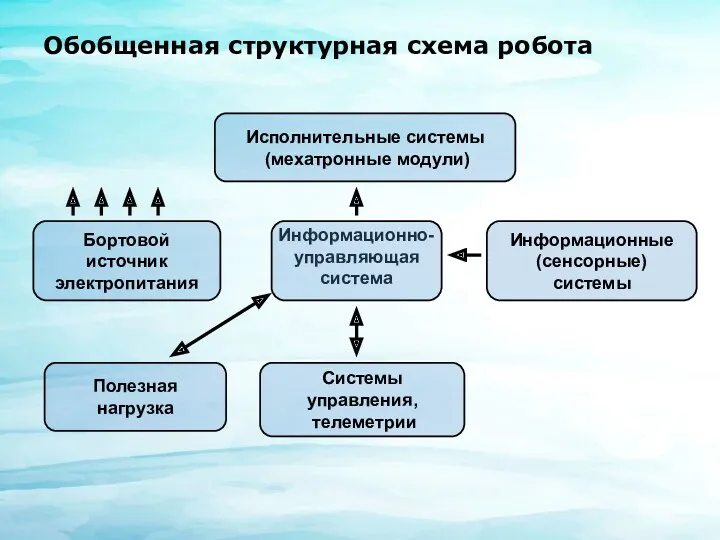
Обобщенная структурная схема робота
Информационно-управляющая система
Полезная нагрузка
Исполнительные системы
(мехатронные модули)
Информационные
(сенсорные)
Обобщенная структурная схема робота
Информационно-управляющая система
Полезная нагрузка
Исполнительные системы
(мехатронные модули)
Информационные
(сенсорные)

Кафедра СМ11
Подводные аппараты и роботы
Кафедра СМ11
Подводные аппараты и роботы
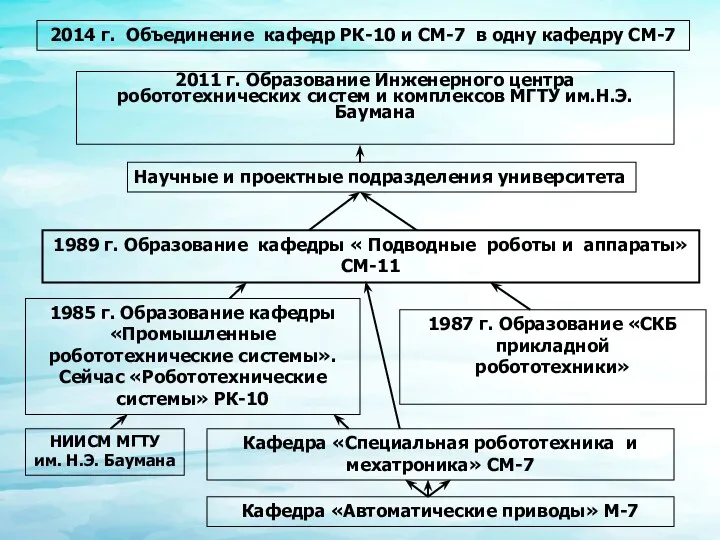
Кафедра «Автоматические приводы» М-7
1985 г. Образование кафедры
«Промышленные робототехнические системы». Сейчас
Кафедра «Автоматические приводы» М-7
1985 г. Образование кафедры
«Промышленные робототехнические системы». Сейчас
Изучаемые дисциплины
Изучаемые дисциплины
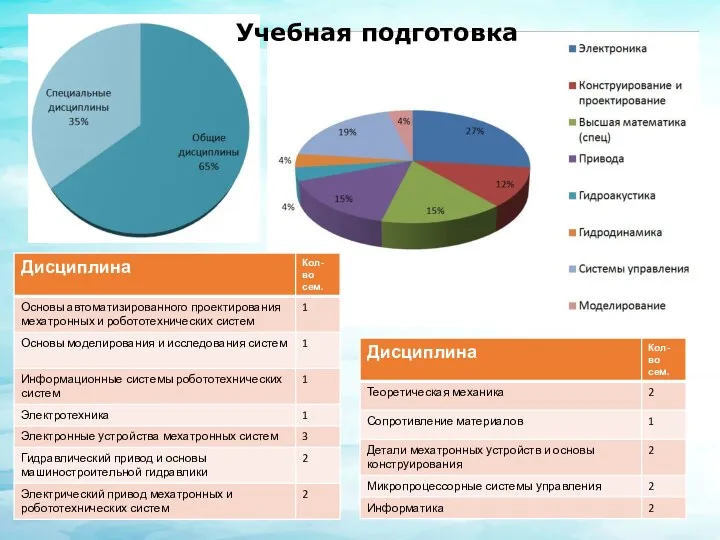
Учебная подготовка
Учебная подготовка
 Short stories
Short stories Постимпрессионизм. Поль Гоген
Постимпрессионизм. Поль Гоген Серебряный век русской поэзии
Серебряный век русской поэзии Презентация на тему: Натуральный каучук.
Презентация на тему: Натуральный каучук. Управление и моделирование бизнес-процессами
Управление и моделирование бизнес-процессами Натурные испытания аэродромных покрытий
Натурные испытания аэродромных покрытий Медианы, биссектрисы и высоты треугольника
Медианы, биссектрисы и высоты треугольника Шоколад-вред или польза?
Шоколад-вред или польза? Гербарий сказочных растений
Гербарий сказочных растений Административное правонарушение и административная ответственность
Административное правонарушение и административная ответственность Способы увеличения протяженности акустического канала утечки информации
Способы увеличения протяженности акустического канала утечки информации Организационные структуры в проектах. Управление проектами
Организационные структуры в проектах. Управление проектами Предконцепция Променад-парка
Предконцепция Променад-парка Как делают бумагу
Как делают бумагу Регламент оказания услуг ранней помощи в условиях консультационных пунктов
Регламент оказания услуг ранней помощи в условиях консультационных пунктов My future plans
My future plans портфолио Диск Диск Диск Диск Диск Диск Диск
портфолио Диск Диск Диск Диск Диск Диск Диск Храмы-памятники воинской славы
Храмы-памятники воинской славы Основы теории градостроительства и районной планировки
Основы теории градостроительства и районной планировки презентация к 1 родительскому собранию по ТРИЗ
презентация к 1 родительскому собранию по ТРИЗ Терапия депрессий и профилактика суицида
Терапия депрессий и профилактика суицида Первое родительское собрание
Первое родительское собрание Обрабатывающая промышленность
Обрабатывающая промышленность Наш лучший друг - Агния Барто
Наш лучший друг - Агния Барто Dental instruments
Dental instruments Теоретические подходы к пониманию организаций и их положения
Теоретические подходы к пониманию организаций и их положения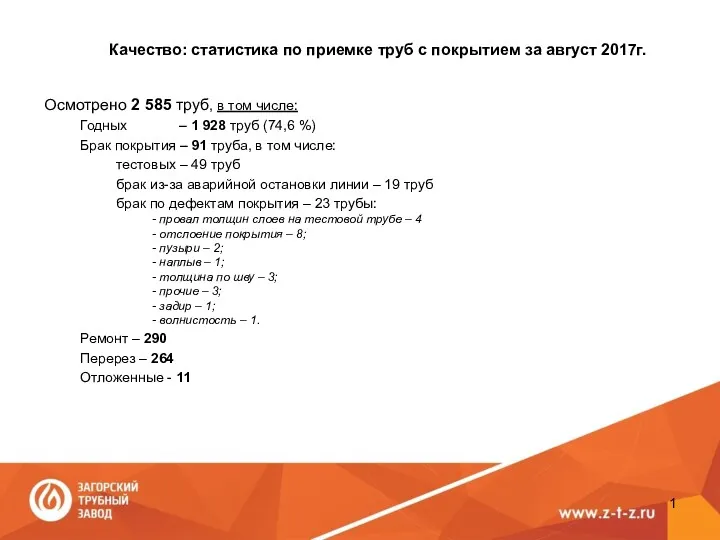 Работа цеха покрытий в августе 2017 года
Работа цеха покрытий в августе 2017 года 20230816_prezentatsiya_istoriya_raketostroeniya
20230816_prezentatsiya_istoriya_raketostroeniya