- Загальні відомості про радіолокаційну станцію

Содержание
- 2. Місце РЛС в радіотехнічній системі. Узагальнена структурна схема РЛС. Основні характеристики РЛС і вимоги до них.
- 3. Місце РЛС в радіотехнічній системі РЛ система − це сукупність радіотехнічних засобів, певним чином розташованих на
- 4. До ЗРЛ відносяться: засоби активної локації (активні РЛС з пасивною відповіддю); активні РЛС з активною відповіддю,
- 5. РЛ системи дозволяють розв’язувати широке коло задач, котрі визначаються споживачами − системами більш високого порядку, до
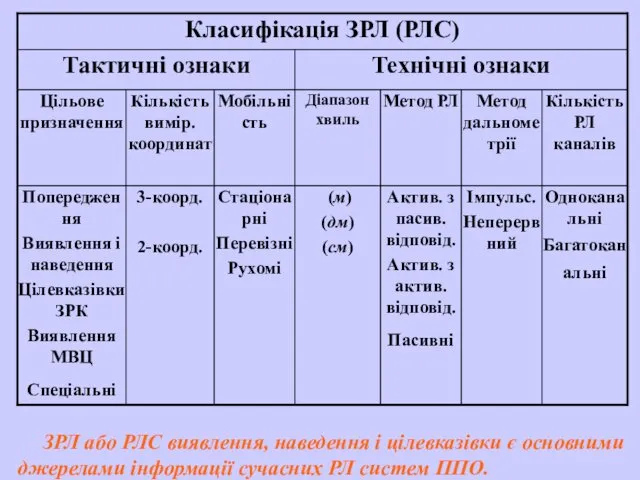
- 6. ЗРЛ або РЛС виявлення, наведення і цілевказівки є основними джерелами інформації сучасних РЛ систем ППО.
- 7. Незважаючи на різницю ТТХ, варіантів технічних рішень окремих систем і їх елементних баз, РЛС мають багато
- 8. Рис. 1. Узагальнена структурна схема РЛС
- 9. Для виконання цих задач до складу РЛС входять: система формування зондувального сигналу; антенна система, що забезпечує
- 10. система синхронізації забезпечує синхронну роботу всіх трактів і систем РЛС; система керування режимами роботи РЛС дозволяє
- 11. Основні характеристики РЛС і вимоги до них РЛС, що стоять на озброєнні, характеризуються ТТД, котрі являють
- 12. До тактичних характеристик РЛС відносяться: склад інформації, що видається; зона огляду; точність інформації, що видається; роздільні
- 13. Зона огляду: це частина простору, у межах якої РЛС забезпечує отримання інформації про ціль із загальним
- 14. Форму ЗО РЛС прийнято характеризувати графіком або таблицею залежності D=f(H) (де D − дальність до межі
- 15. Параметрами зони огляду є: розміри зони в азимутальній площині; εmin і εmах; Hmax; максимально похила дальність
- 16. Нmax не повинна бути менша, аніж максимальна можлива висота польоту сучасних і перспективних літаків Нmax ≥
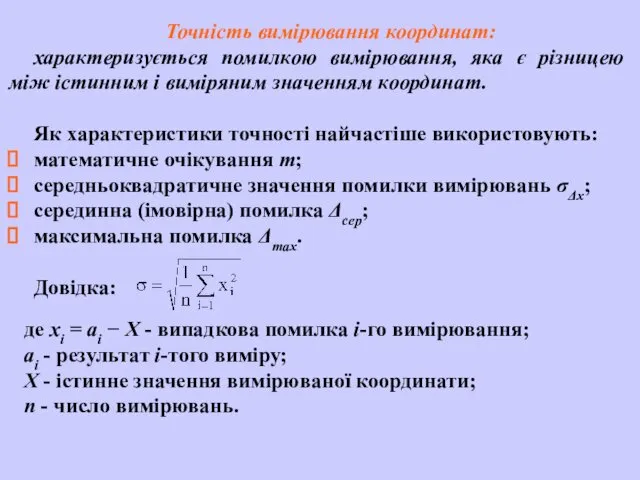
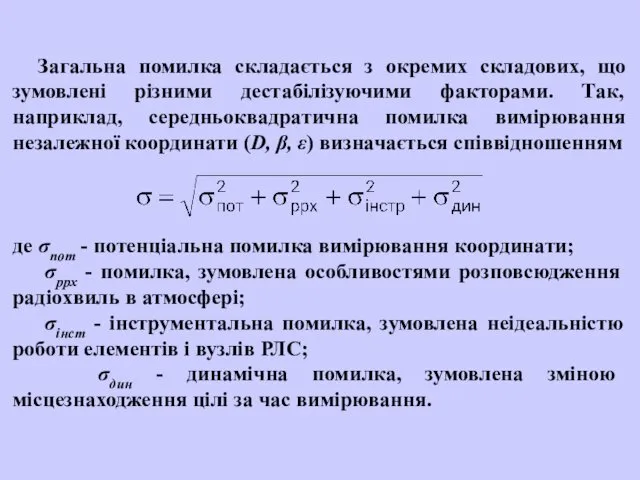
- 17. Точність вимірювання координат: характеризується помилкою вимірювання, яка є різницею між істинним і виміряним значенням координат. Як
- 18. Загальна помилка складається з окремих складових, що зумовлені різними дестабілізуючими факторами. Так, наприклад, середньоквадратична помилка вимірювання
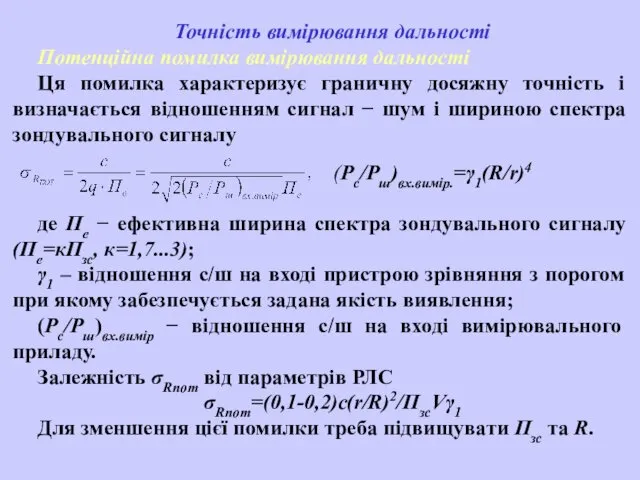
- 19. Точність вимірювання дальності Потенційна помилка вимірювання дальності Ця помилка характеризує граничну досяжну точність і визначається відношенням
- 20. Потенційна помилка вимірювання дальності в РЛС виявлення навіть при використанні порівняно вузькосмугових сигналів звичайно не перевищує
- 21. Помилка вимірювання дальності за рахунок особливостей розповсюдження радіохвиль. Атмосфера є неоднорідним середовищем, в якому спостерігається зміна
- 22. Інструментальна помилка вимірювання дальності. Її складовими σRінстр є: помилка за рахунок зміни часу запізнення сигналу tзап
- 23. При автоматичному зніманні дальність вимірюється по номеру каналу дальності N, в якому знаходиться сигнал цілі r*=NΔr,
- 24. Динамічна помилка. Динамічна помилка обумовлена зміною дальності до цілі за час знімання, що визначається як інтервал
- 25. Точність вимірювання азимуту. Потенційна помилка вимірювання кутових координат визначається формою та шириною діаграми направленості антени у
- 26. де γβ − коефіцієнт погіршення точності визначення азимуту реальної РЛС.
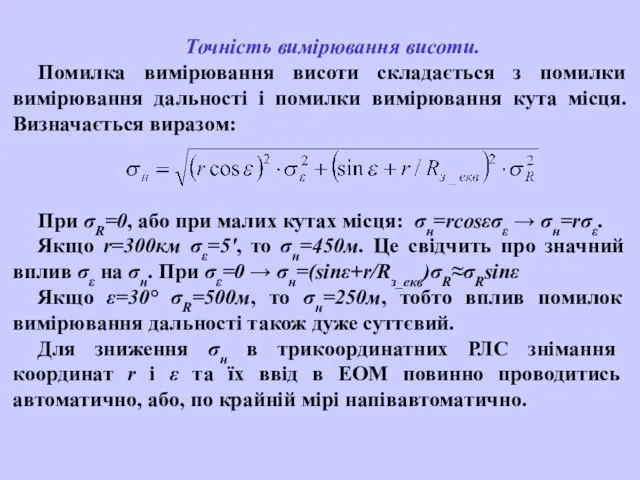
- 27. Точність вимірювання висоти. Помилка вимірювання висоти складається з помилки вимірювання дальності і помилки вимірювання кута місця.
- 28. Роздільна здатність по координатам: розуміють таку мінімальну різницю в даній координаті у двох цілей при співпаданні
- 29. Для роздільного спостереження цілей треба щоб роздільна здатність по площинним координатам δx,y була не гірша за
- 30. Перешкодозахищеність: це властивість РЛС виконувати свої задачі з допустимим зниженням якості за умовами перешкод. Вплив активних
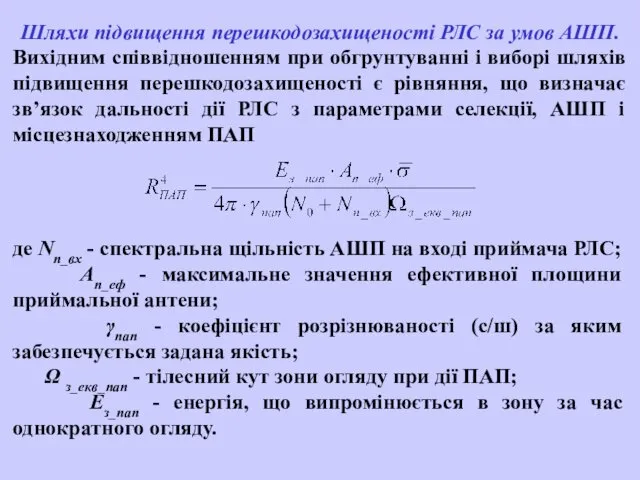
- 31. Шляхи підвищення перешкодозахищеності РЛС за умов АШП. Вихідним співвідношенням при обгрунтуванні і виборі шляхів підвищення перешкодозахищеності
- 32. З аналізу рівняння випливає, що для забезпечення потрібного ПЗ РЛС від АШП можна застосувати: метод силової
- 33. Найпоширенішими способами створення ПП є скидання з літака постановника дипольних відбивачів (ДВ) у вигляді стандартних пачок
- 34. Інформаційна здатність (ІЗ): максимальна кількість цілей, по яких РЛС може видавати інформацію заданої якості і дискретності
- 35. Надійність: властивість РЛС виконувати і зберігати у часі задані функції в заданих режимах і умовах застосування,
- 36. Електромагнітна сумісність (ЕМС): називається властивість радіоелектронних засобів (РЕЗ) функціонувати без погіршення якісних показників в заданій ЕМ
- 38. Скачать презентацию
Місце РЛС в радіотехнічній системі.
Узагальнена структурна схема РЛС.
Основні характеристики РЛС і
Місце РЛС в радіотехнічній системі.
Узагальнена структурна схема РЛС.
Основні характеристики РЛС і
Місце РЛС в радіотехнічній системі
РЛ система − це сукупність радіотехнічних засобів,
Місце РЛС в радіотехнічній системі
РЛ система − це сукупність радіотехнічних засобів,
До ЗРЛ відносяться:
засоби активної локації (активні РЛС з пасивною відповіддю);
активні
До ЗРЛ відносяться:
засоби активної локації (активні РЛС з пасивною відповіддю);
активні
РЛ системи дозволяють розв’язувати широке коло задач, котрі визначаються споживачами −
РЛ системи дозволяють розв’язувати широке коло задач, котрі визначаються споживачами −
ЗРЛ або РЛС виявлення, наведення і цілевказівки є основними джерелами інформації
ЗРЛ або РЛС виявлення, наведення і цілевказівки є основними джерелами інформації
Незважаючи на різницю ТТХ, варіантів технічних рішень окремих систем і їх
Незважаючи на різницю ТТХ, варіантів технічних рішень окремих систем і їх
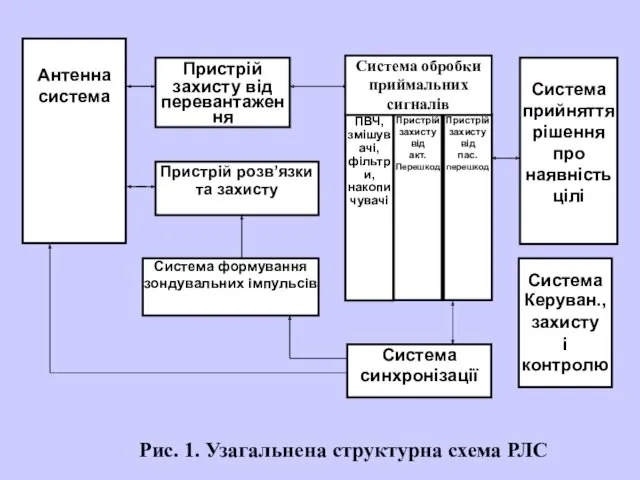
Рис. 1. Узагальнена структурна схема РЛС
Рис. 1. Узагальнена структурна схема РЛС
Для виконання цих задач до складу РЛС входять:
система формування зондувального сигналу;
антенна
Для виконання цих задач до складу РЛС входять:
система формування зондувального сигналу;
антенна
система синхронізації забезпечує синхронну роботу всіх трактів і систем РЛС;
система керування
система синхронізації забезпечує синхронну роботу всіх трактів і систем РЛС;
система керування
Основні характеристики РЛС і вимоги до них
РЛС, що стоять на озброєнні,
Основні характеристики РЛС і вимоги до них
РЛС, що стоять на озброєнні,
До тактичних характеристик РЛС відносяться:
склад інформації, що видається;
зона огляду;
точність інформації, що
До тактичних характеристик РЛС відносяться:
склад інформації, що видається;
зона огляду;
точність інформації, що
Зона огляду:
це частина простору, у межах якої РЛС забезпечує отримання інформації
Зона огляду:
це частина простору, у межах якої РЛС забезпечує отримання інформації
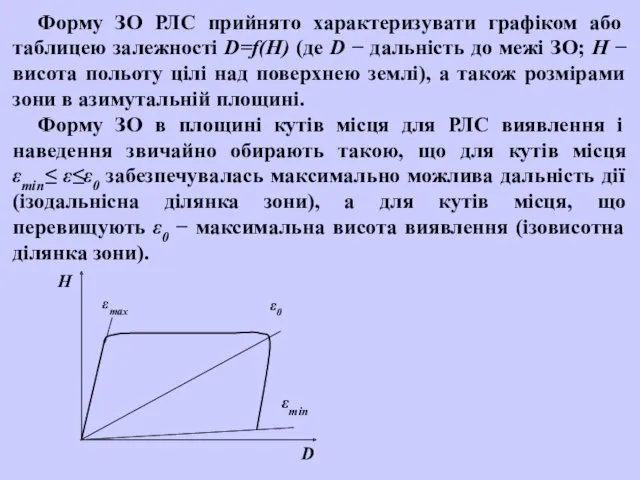
Форму ЗО РЛС прийнято характеризувати графіком або таблицею залежності D=f(H) (де
Форму ЗО РЛС прийнято характеризувати графіком або таблицею залежності D=f(H) (де
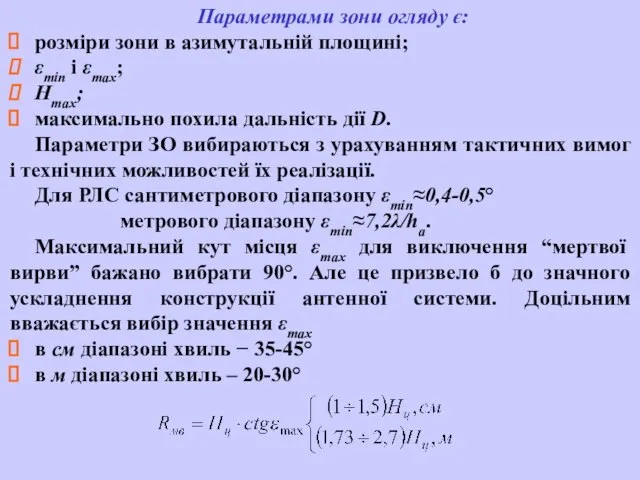
Параметрами зони огляду є:
розміри зони в азимутальній площині;
εmin і εmах;
Hmax;
максимально похила
Параметрами зони огляду є:
розміри зони в азимутальній площині;
εmin і εmах;
Hmax;
максимально похила
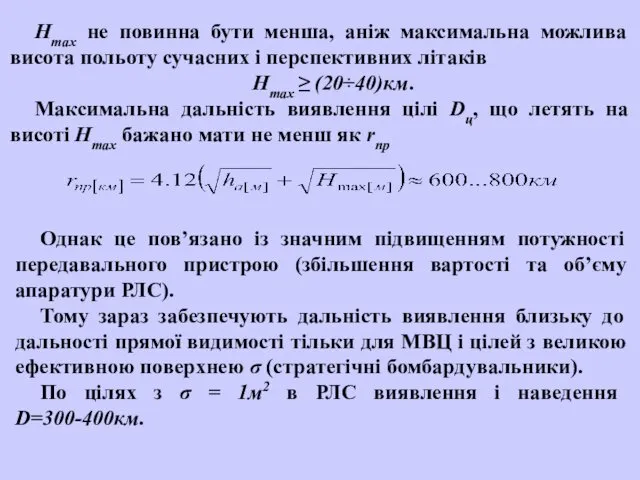
Нmax не повинна бути менша, аніж максимальна можлива висота польоту сучасних
Нmax не повинна бути менша, аніж максимальна можлива висота польоту сучасних
Точність вимірювання координат:
характеризується помилкою вимірювання, яка є різницею між істинним і
Точність вимірювання координат:
характеризується помилкою вимірювання, яка є різницею між істинним і
Загальна помилка складається з окремих складових, що зумовлені різними дестабілізуючими факторами.
Загальна помилка складається з окремих складових, що зумовлені різними дестабілізуючими факторами.
Точність вимірювання дальності
Потенційна помилка вимірювання дальності
Ця помилка характеризує граничну досяжну точність
Точність вимірювання дальності
Потенційна помилка вимірювання дальності
Ця помилка характеризує граничну досяжну точність
Потенційна помилка вимірювання дальності в РЛС виявлення навіть при використанні порівняно
Потенційна помилка вимірювання дальності в РЛС виявлення навіть при використанні порівняно
Помилка вимірювання дальності за рахунок особливостей розповсюдження радіохвиль.
Атмосфера є неоднорідним середовищем,
Помилка вимірювання дальності за рахунок особливостей розповсюдження радіохвиль.
Атмосфера є неоднорідним середовищем,
Інструментальна помилка вимірювання дальності.
Її складовими σRінстр є:
помилка за рахунок зміни часу
Інструментальна помилка вимірювання дальності.
Її складовими σRінстр є:
помилка за рахунок зміни часу
При автоматичному зніманні дальність вимірюється по номеру каналу дальності N, в
При автоматичному зніманні дальність вимірюється по номеру каналу дальності N, в
Динамічна помилка.
Динамічна помилка обумовлена зміною дальності до цілі за час знімання,
Динамічна помилка.
Динамічна помилка обумовлена зміною дальності до цілі за час знімання,
Точність вимірювання азимуту.
Потенційна помилка вимірювання кутових координат визначається формою та шириною
Точність вимірювання азимуту.
Потенційна помилка вимірювання кутових координат визначається формою та шириною

де γβ − коефіцієнт погіршення точності визначення азимуту реальної РЛС.
де γβ − коефіцієнт погіршення точності визначення азимуту реальної РЛС.
Точність вимірювання висоти.
Помилка вимірювання висоти складається з помилки вимірювання дальності і
Точність вимірювання висоти.
Помилка вимірювання висоти складається з помилки вимірювання дальності і
Роздільна здатність по координатам:
розуміють таку мінімальну різницю в даній координаті у
Роздільна здатність по координатам:
розуміють таку мінімальну різницю в даній координаті у
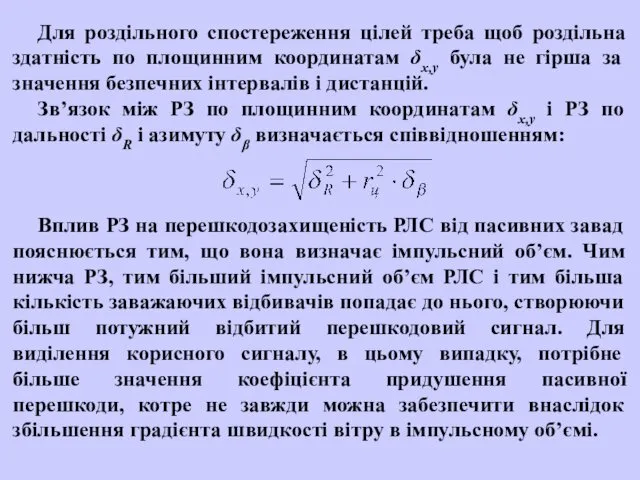
Для роздільного спостереження цілей треба щоб роздільна здатність по площинним координатам
Для роздільного спостереження цілей треба щоб роздільна здатність по площинним координатам
Перешкодозахищеність:
це властивість РЛС виконувати свої задачі з допустимим зниженням якості за
Перешкодозахищеність:
це властивість РЛС виконувати свої задачі з допустимим зниженням якості за
Шляхи підвищення перешкодозахищеності РЛС за умов АШП.
Вихідним співвідношенням при обгрунтуванні і
Шляхи підвищення перешкодозахищеності РЛС за умов АШП.
Вихідним співвідношенням при обгрунтуванні і
З аналізу рівняння випливає, що для забезпечення потрібного ПЗ РЛС від
З аналізу рівняння випливає, що для забезпечення потрібного ПЗ РЛС від
Найпоширенішими способами створення ПП є скидання з літака постановника дипольних відбивачів
Найпоширенішими способами створення ПП є скидання з літака постановника дипольних відбивачів
Інформаційна здатність (ІЗ):
максимальна кількість цілей, по яких РЛС може видавати інформацію
Інформаційна здатність (ІЗ):
максимальна кількість цілей, по яких РЛС може видавати інформацію
Надійність:
властивість РЛС виконувати і зберігати у часі задані функції в заданих
Надійність:
властивість РЛС виконувати і зберігати у часі задані функції в заданих
Електромагнітна сумісність (ЕМС):
називається властивість радіоелектронних засобів (РЕЗ) функціонувати без погіршення якісних
Електромагнітна сумісність (ЕМС):
називається властивість радіоелектронних засобів (РЕЗ) функціонувати без погіршення якісних
 Материально-техническое обеспечение спортивных сооружений
Материально-техническое обеспечение спортивных сооружений Праздник Выпускной в начальной школе
Праздник Выпускной в начальной школе Гипподамова система: плюсы и минусы
Гипподамова система: плюсы и минусы Культурные традиции буддизма
Культурные традиции буддизма Плакат
Плакат Муза блокадного Ленинграда
Муза блокадного Ленинграда 5 игр на знакомство
5 игр на знакомство Выставка детского и семейного творчества Осенние фантазии
Выставка детского и семейного творчества Осенние фантазии Тоталитаризм. Отрицательные черты
Тоталитаризм. Отрицательные черты Экономика неопределенности, информации и страхования
Экономика неопределенности, информации и страхования Острое повреждение почек при массивной кровопотере
Острое повреждение почек при массивной кровопотере Влияние вибрационного массажа на физическое развитие и двигательную подготовленность студентов - легкоатлетов
Влияние вибрационного массажа на физическое развитие и двигательную подготовленность студентов - легкоатлетов OLED (органический светодиод ) дисплеи
OLED (органический светодиод ) дисплеи 21 января 2018 года Всемирный День снега (World Snow Day). Международный день зимних видов спорта
21 января 2018 года Всемирный День снега (World Snow Day). Международный день зимних видов спорта Сканер, его основные характеристики, принцип действия. Программы распознавания текста
Сканер, его основные характеристики, принцип действия. Программы распознавания текста Проект развития системы дополнительного образования детей Вологодской области
Проект развития системы дополнительного образования детей Вологодской области Деталь беттерін металдармен қорытпалармен жабу
Деталь беттерін металдармен қорытпалармен жабу Архитектурно-градостроительная концепция развития земельных участков принадлежащих ООО Уваровский-1, ЗАО Агропроминвест
Архитектурно-градостроительная концепция развития земельных участков принадлежащих ООО Уваровский-1, ЗАО Агропроминвест Растворы и растворимость веществ и газов в воде. Лекция №4
Растворы и растворимость веществ и газов в воде. Лекция №4 Семья Кудряшовых
Семья Кудряшовых Презентация Профилактика ОНР средствами игровых упражнений
Презентация Профилактика ОНР средствами игровых упражнений Общие понятия о здоровье как основной ценности человека
Общие понятия о здоровье как основной ценности человека Методический доклад на тему Урок специальности в музыкальной школе
Методический доклад на тему Урок специальности в музыкальной школе Библия
Библия Первичная цилиарная дискинезия (ПЦД)
Первичная цилиарная дискинезия (ПЦД) Татар телен өйрәнәбез
Татар телен өйрәнәбез Отказы несущих и ограждающих конструкций
Отказы несущих и ограждающих конструкций Развитие внимания детей дошкольного возраста
Развитие внимания детей дошкольного возраста