- Замкнутые системы управления

Содержание
- 2. Общая функциональная схема распределенной (сетевой архитектуры) иерархической системы управления:
- 3. Обобщенная схема многоконтурной системы автоматического управления .
- 5. Диаграмма изменения во времени ε(t) и ε’(t)
- 6. ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР График пропорционального регулирования
- 7. Переходный процесс при пропорциональном регулировании
- 8. П-регулятор Структурная схема П-регулятора Закон П-регулирования
- 9. Структурная схема идеальных ПИ-регуляторов
- 10. Переходной процесс при пропорционально-интегральном регулировании
- 11. Варианты структурных схем промышленных ПИ-регуляторов
- 12. ПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНОДИФ-ФЕРЕНЦИАЛЬНЫЕ (ПИД) РЕГУЛЯТОРЫ
- 13. Переходной процесс при ПИД- регулировании
- 14. БИБЛИОТЕКА АЛГОРИТМОВ РЕГУЛИРОВАНИЯ В ПАКЕТЕ UNITY PRO
- 15. УПРАВЛЕНИЕ ВВОДОМ/ВЫВОДОМ АНАЛОГОВЫХ СИГНАЛОВ (IO MANAGEMENT) Библиотека управления аналоговым вводом/выводом содержит разделы Analog I/O Configuration, Analog
- 16. УСТРОЙСТВА ОБРАБОТКИ ДАННЫХ (CONDITIONING) Здесь представлены алгоритмы динамических преобразований: фильтр 1-го порядка, вычислитель производной со сглаживанием,
- 17. Функциональные блоки контура регулирования DTIME (Dead Time) – задержка. Этот блок реализует функцию чистого запаздывания в
- 18. Функциональные блоки контура регулирования (продолжение) LEAD (Differentiator with Delay) – дифференцирование с задержкой, вычисление производной со
- 19. Функциональные блоки контура регулирования (продолжение) TOTALIZER (Totalling Unit) – сумматор (накопитель), суммирующая функция, предназначенная для представления
- 20. РЕГУЛЯТОРЫ (CONTROLLER) С помощью блоков FFB, входящих в раздел «Controller», могут осуществляться следующие алгоритмы регулирования и
- 21. РЕГУЛЯТОРЫ (продолжение) PI_B (Basic PI Controller) – базовый ПИ-регулятор; этот блок рекомендуется использовать в случае грубой
- 22. РЕГУЛЯТОРЫ (продолжение) SAMPLETM (Sample time) – шаблон времени; этот блок используется для управления блоками после холодного
- 23. РЕГУЛЯТОРЫ (продолжение) STEP3 (3-Position On/Off Controller) – трех позиционный регулятор, трехпозиционное реле с зоной нечувствительности и
- 24. Структурная схема САР с ПИД-регулятором FGEN-функциональный блок является генератором задающего воздействия g; а блок PID –
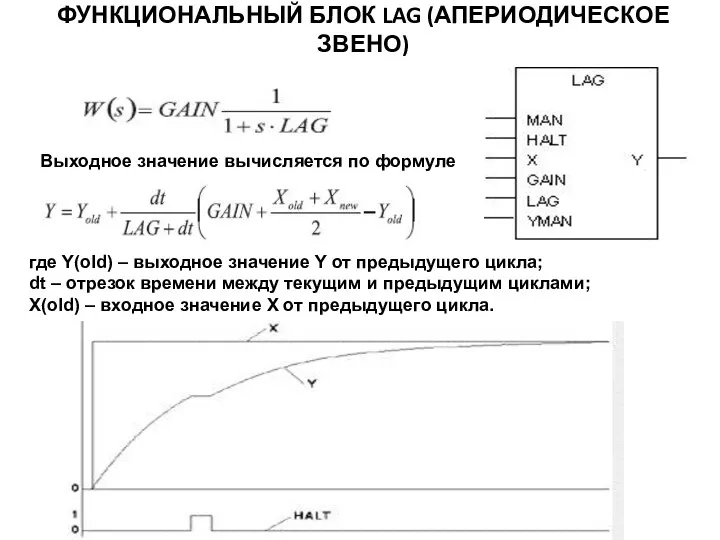
- 25. ФУНКЦИОНАЛЬНЫЙ БЛОК LAG (АПЕРИОДИЧЕСКОЕ ЗВЕНО) Выходное значение вычисляется по формуле где Y(old) – выходное значение Y
- 26. ФУНКЦИОНАЛЬНЫЙ БЛОК DEADTIME (ЗАПАЗДЫВАНИЕ)
- 27. ФУНКЦИОНАЛЬНЫЙ БЛОК FGEN (ГЕНЕРАТОР ФУНКЦИЙ) Генератор функций позволяет получить восемь сигналов различной формы: ступенчатую функцию, линейную,
- 29. PID-регулятор
- 30. Структура PID-регулятора
- 32. Скачать презентацию
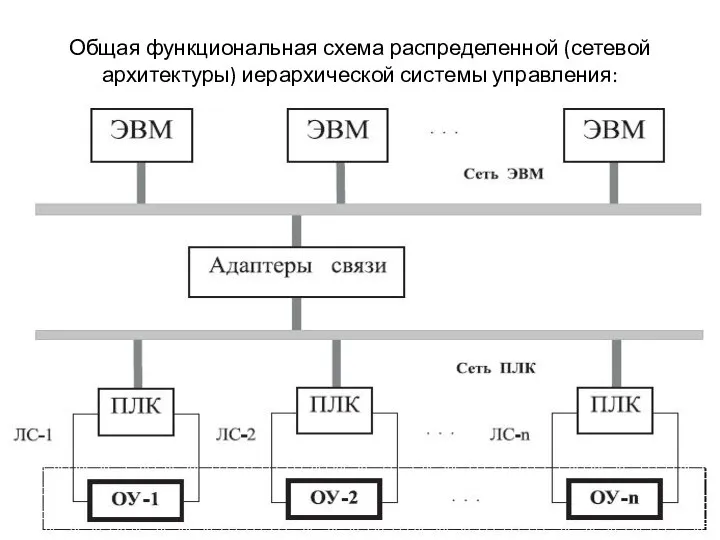
Общая функциональная схема распределенной (сетевой архитектуры) иерархической системы управления:
Общая функциональная схема распределенной (сетевой архитектуры) иерархической системы управления:
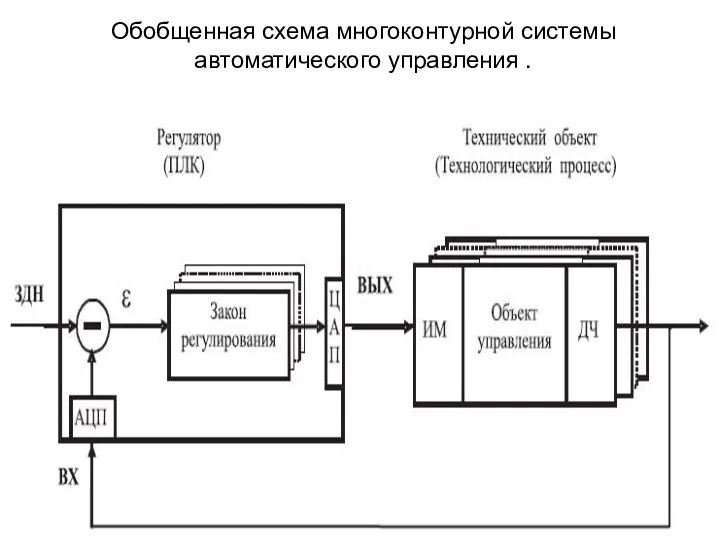
Обобщенная схема многоконтурной системы автоматического управления .
Обобщенная схема многоконтурной системы автоматического управления .
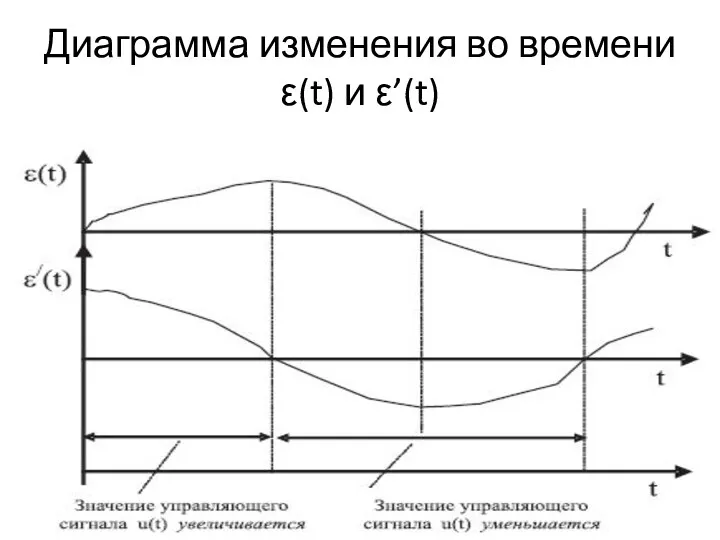
Диаграмма изменения во времени ε(t) и ε’(t)
Диаграмма изменения во времени ε(t) и ε’(t)
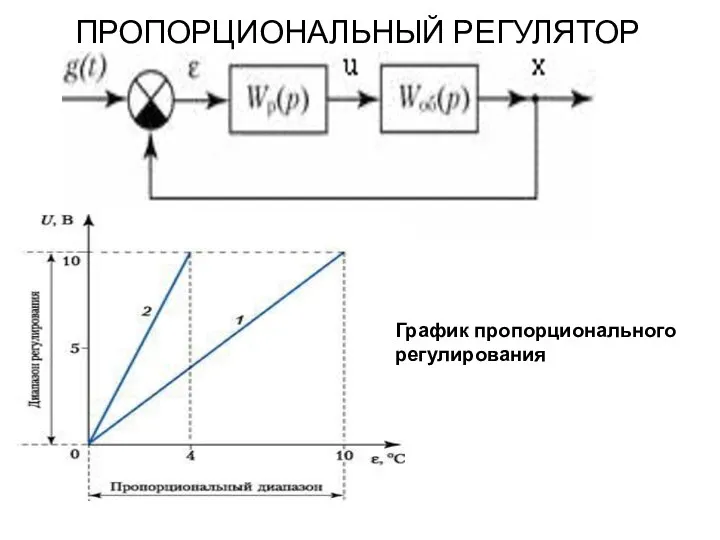
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР
График пропорционального
регулирования
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР
График пропорционального
регулирования
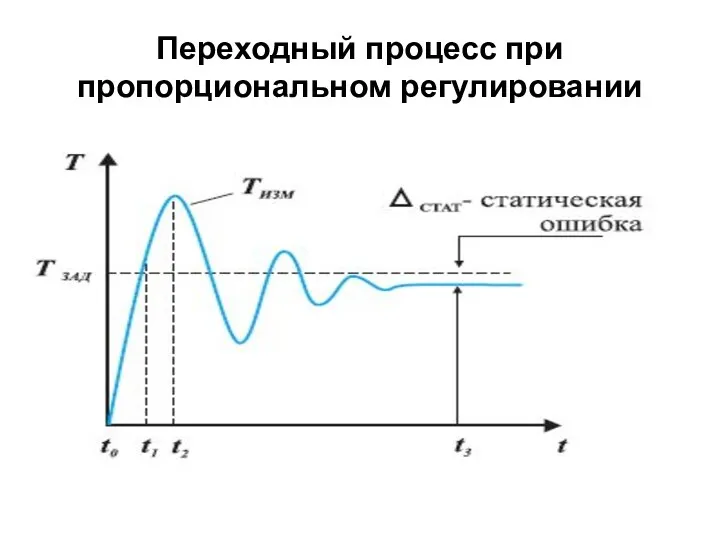
Переходный процесс при пропорциональном регулировании
Переходный процесс при пропорциональном регулировании
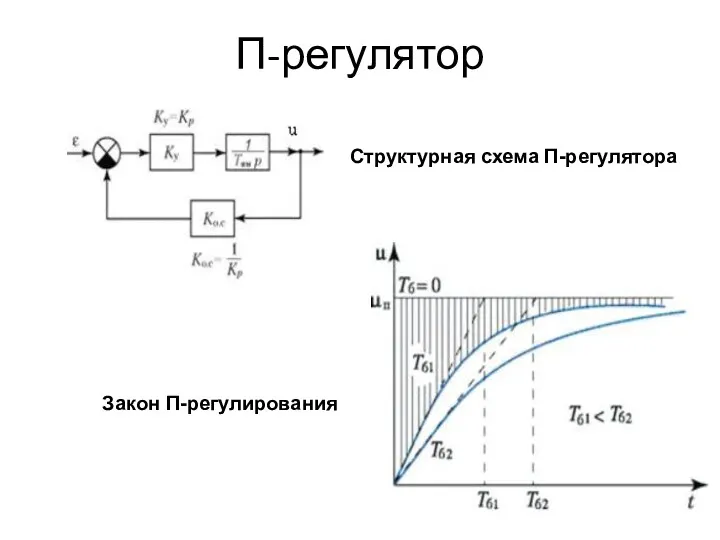
П-регулятор
Структурная схема П-регулятора
Закон П-регулирования
П-регулятор
Структурная схема П-регулятора
Закон П-регулирования
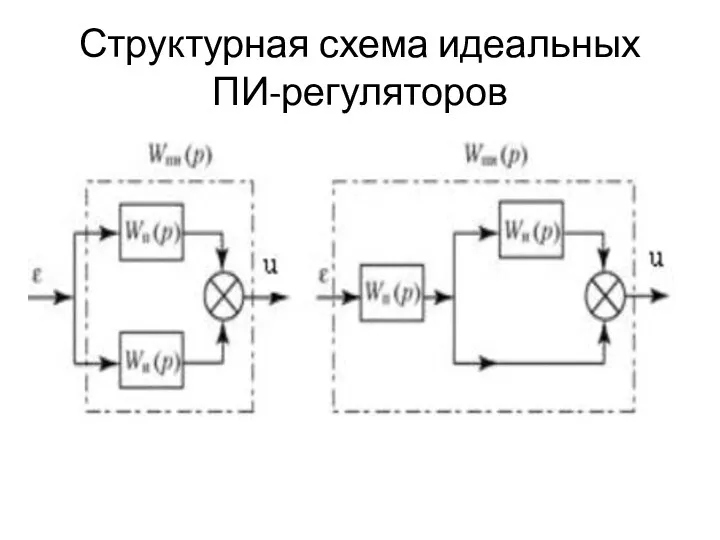
Структурная схема идеальных
ПИ-регуляторов
Структурная схема идеальных
ПИ-регуляторов
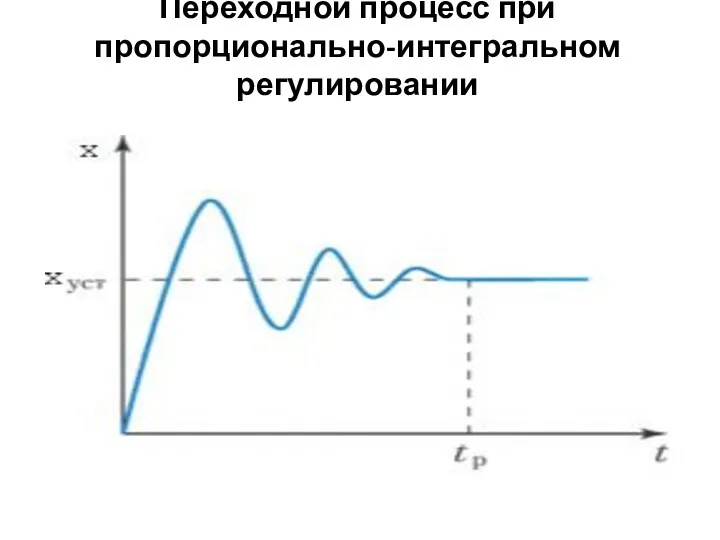
Переходной процесс при пропорционально-интегральном регулировании
Переходной процесс при пропорционально-интегральном регулировании
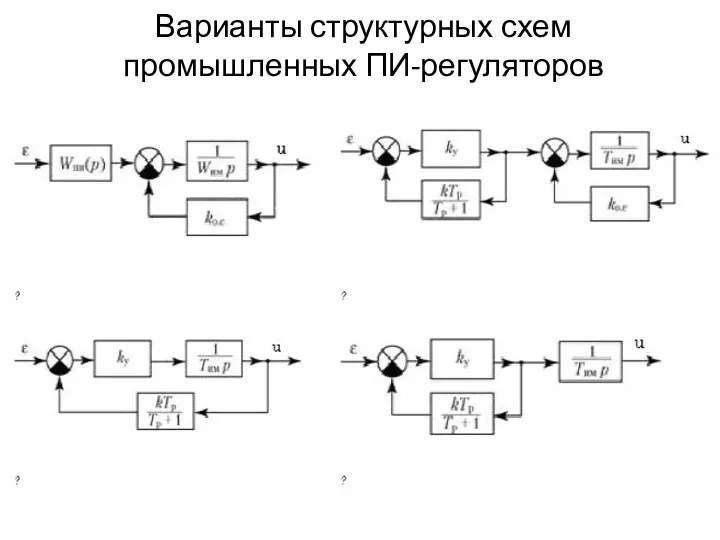
Варианты структурных схем промышленных ПИ-регуляторов
Варианты структурных схем промышленных ПИ-регуляторов
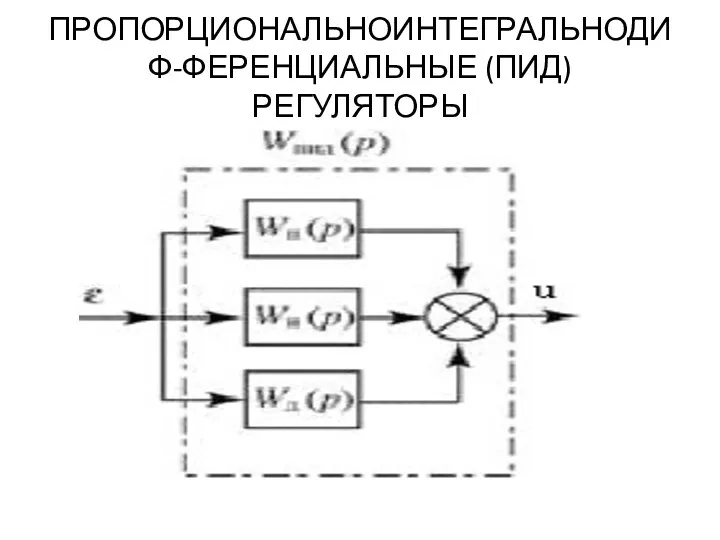
ПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНОДИФ-ФЕРЕНЦИАЛЬНЫЕ (ПИД) РЕГУЛЯТОРЫ
ПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНОДИФ-ФЕРЕНЦИАЛЬНЫЕ (ПИД) РЕГУЛЯТОРЫ
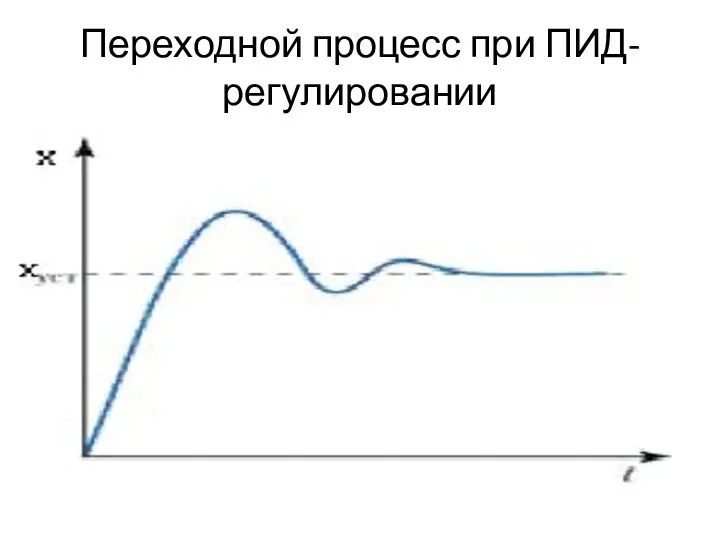
Переходной процесс при ПИД- регулировании
Переходной процесс при ПИД- регулировании
БИБЛИОТЕКА АЛГОРИТМОВ РЕГУЛИРОВАНИЯ В ПАКЕТЕ
UNITY PRO
БИБЛИОТЕКА АЛГОРИТМОВ РЕГУЛИРОВАНИЯ В ПАКЕТЕ
UNITY PRO
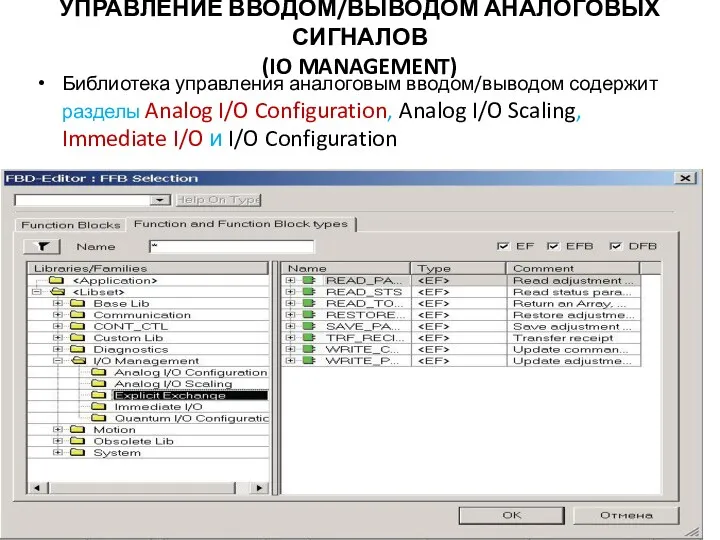
УПРАВЛЕНИЕ ВВОДОМ/ВЫВОДОМ АНАЛОГОВЫХ СИГНАЛОВ
(IO MANAGEMENT)
Библиотека управления аналоговым вводом/выводом содержит разделы
УПРАВЛЕНИЕ ВВОДОМ/ВЫВОДОМ АНАЛОГОВЫХ СИГНАЛОВ
(IO MANAGEMENT)
Библиотека управления аналоговым вводом/выводом содержит разделы
УСТРОЙСТВА ОБРАБОТКИ ДАННЫХ (CONDITIONING)
Здесь представлены алгоритмы динамических преобразований:
фильтр 1-го порядка,
УСТРОЙСТВА ОБРАБОТКИ ДАННЫХ (CONDITIONING)
Здесь представлены алгоритмы динамических преобразований:
фильтр 1-го порядка,
Функциональные блоки контура регулирования
DTIME (Dead Time) – задержка. Этот блок реализует
Функциональные блоки контура регулирования
DTIME (Dead Time) – задержка. Этот блок реализует
Функциональные блоки контура регулирования
(продолжение)
LEAD (Differentiator with Delay) – дифференцирование с задержкой,
Функциональные блоки контура регулирования
(продолжение)
LEAD (Differentiator with Delay) – дифференцирование с задержкой,
Функциональные блоки контура регулирования
(продолжение)
TOTALIZER (Totalling Unit) – сумматор (накопитель), суммирующая функция,
Функциональные блоки контура регулирования
(продолжение)
TOTALIZER (Totalling Unit) – сумматор (накопитель), суммирующая функция,
РЕГУЛЯТОРЫ (CONTROLLER)
С помощью блоков FFB, входящих в раздел «Controller», могут осуществляться
РЕГУЛЯТОРЫ (CONTROLLER)
С помощью блоков FFB, входящих в раздел «Controller», могут осуществляться
РЕГУЛЯТОРЫ (продолжение)
PI_B (Basic PI Controller) – базовый ПИ-регулятор; этот блок рекомендуется
РЕГУЛЯТОРЫ (продолжение)
PI_B (Basic PI Controller) – базовый ПИ-регулятор; этот блок рекомендуется
РЕГУЛЯТОРЫ (продолжение)
SAMPLETM (Sample time) – шаблон времени; этот блок используется для
РЕГУЛЯТОРЫ (продолжение)
SAMPLETM (Sample time) – шаблон времени; этот блок используется для
РЕГУЛЯТОРЫ (продолжение)
STEP3 (3-Position On/Off Controller) – трех позиционный регулятор, трехпозиционное реле
РЕГУЛЯТОРЫ (продолжение)
STEP3 (3-Position On/Off Controller) – трех позиционный регулятор, трехпозиционное реле
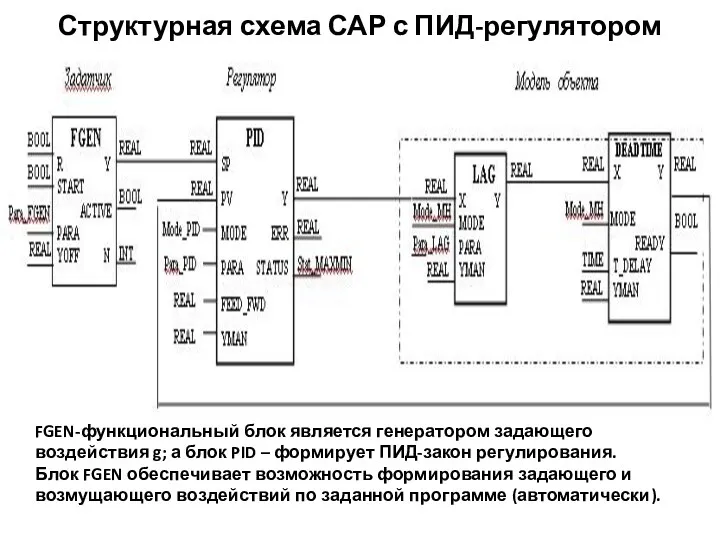
Структурная схема САР с ПИД-регулятором
FGEN-функциональный блок является генератором задающего воздействия g;
Структурная схема САР с ПИД-регулятором
FGEN-функциональный блок является генератором задающего воздействия g;
ФУНКЦИОНАЛЬНЫЙ БЛОК LAG (АПЕРИОДИЧЕСКОЕ ЗВЕНО)
Выходное значение вычисляется по формуле
где Y(old) –
ФУНКЦИОНАЛЬНЫЙ БЛОК LAG (АПЕРИОДИЧЕСКОЕ ЗВЕНО)
Выходное значение вычисляется по формуле
где Y(old) –
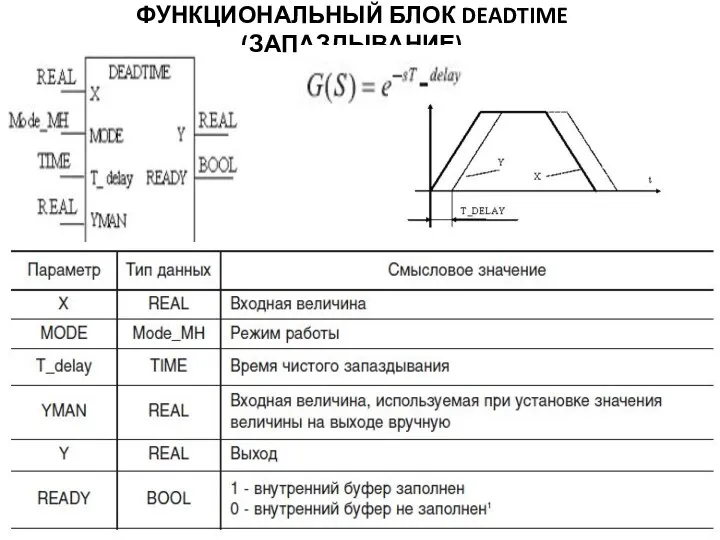
ФУНКЦИОНАЛЬНЫЙ БЛОК DEADTIME (ЗАПАЗДЫВАНИЕ)
ФУНКЦИОНАЛЬНЫЙ БЛОК DEADTIME (ЗАПАЗДЫВАНИЕ)
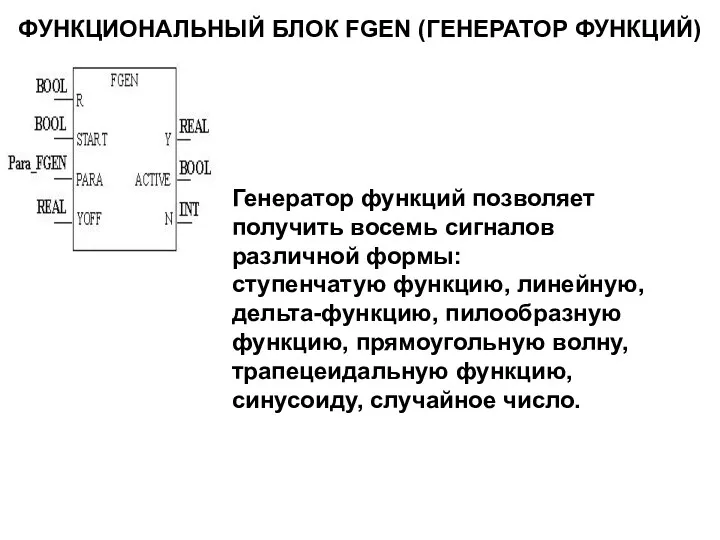
ФУНКЦИОНАЛЬНЫЙ БЛОК FGEN (ГЕНЕРАТОР ФУНКЦИЙ)
Генератор функций позволяет получить восемь сигналов различной
ФУНКЦИОНАЛЬНЫЙ БЛОК FGEN (ГЕНЕРАТОР ФУНКЦИЙ)
Генератор функций позволяет получить восемь сигналов различной

PID-регулятор
PID-регулятор
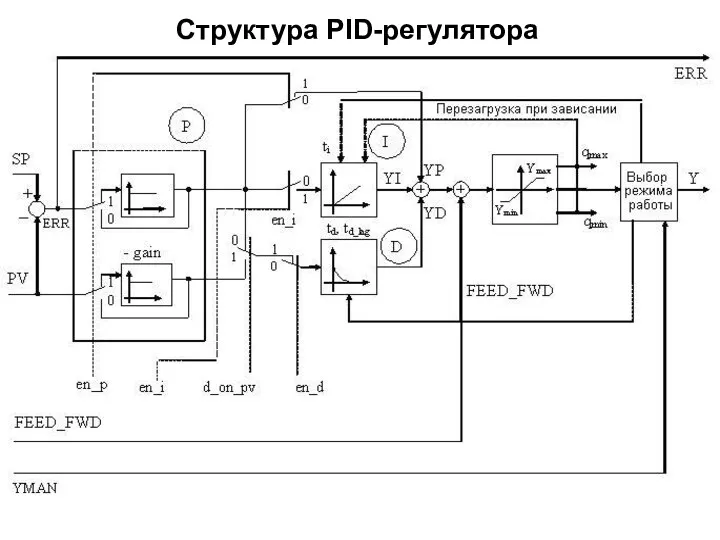
Структура PID-регулятора
Структура PID-регулятора
 Сложение чисел с разными знаками. Вычисление
Сложение чисел с разными знаками. Вычисление Презентация проекта Будь здоров
Презентация проекта Будь здоров Личное влияние
Личное влияние Организация работы регистратуры
Организация работы регистратуры Ландшафтный дизайн
Ландшафтный дизайн Смутное время. Россия XVII век
Смутное время. Россия XVII век Мой край родной - мой Дагестан !
Мой край родной - мой Дагестан ! Машины и оборудование для водоснабжения ферм и автопоения животных
Машины и оборудование для водоснабжения ферм и автопоения животных Асқазанның негізгі бөлімдері (перфорациясы)
Асқазанның негізгі бөлімдері (перфорациясы) Страны Запада на рубеже XX-XXI веков
Страны Запада на рубеже XX-XXI веков Презентация к уроку технологии 3 класс Подставка для письменных принадлежностей
Презентация к уроку технологии 3 класс Подставка для письменных принадлежностей Узловые участковые станции как основные звенья в логистической системе. Организация работы, типы и схемы участковых станций
Узловые участковые станции как основные звенья в логистической системе. Организация работы, типы и схемы участковых станций Шостакович 7 симфония
Шостакович 7 симфония Radio Show Template
Radio Show Template Алюминий и его соединения
Алюминий и его соединения Подснежники
Подснежники Ароматизатор Тельняшка
Ароматизатор Тельняшка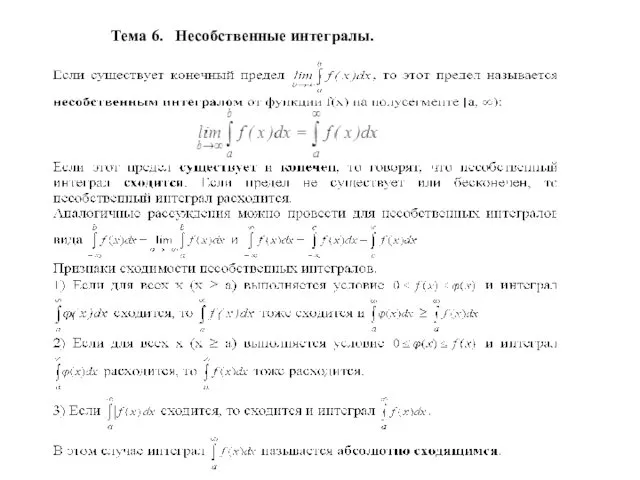 Несобственные интегралы
Несобственные интегралы Малые тела Солнечной системы
Малые тела Солнечной системы Вода на Земле. Гидросфера
Вода на Земле. Гидросфера Презентация по использованию игровых средств Дусима
Презентация по использованию игровых средств Дусима Конспект совместной деятельности Путешествие по дальним странам (совместная работа с Зайцевой Мариной Иосифовной)
Конспект совместной деятельности Путешествие по дальним странам (совместная работа с Зайцевой Мариной Иосифовной) Комплексные решения коррекции фигуры
Комплексные решения коррекции фигуры Канальное кодирование. Основы помехоустойчивого кодирования
Канальное кодирование. Основы помехоустойчивого кодирования Не померкнет летопись Победы посвящается 71-летие Победы советского народа в Великой Отечественной войне
Не померкнет летопись Победы посвящается 71-летие Победы советского народа в Великой Отечественной войне Русские народные потешки и небылицы
Русские народные потешки и небылицы Німеччина (ФРН), утворення ФРН 23 травня 1949
Німеччина (ФРН), утворення ФРН 23 травня 1949 История Трои
История Трои