- Замкнутые СУЭП на базе АД. (Тема 4)

Содержание
- 2. Скалярное частотное управление Важно помнить – Менять только f1 без U1 нельзя Законы частотного управления Законы
- 3. Разомкнутое частотное управление Функциональный преобразователь напряжения Функциональный преобразователь частоты
- 4. Разомкнутое частотное управление ФПН – нелинейный ФПЧ – линейный для закона U/f=const
- 5. Разомкнутое частотное управление Показатели Диапазон регулирования D=8..10:1 Невысокая точность Очень невысокие динамические показатели регулирования Нужно вводить
- 6. Двухконтурное частотное управление ?
- 7. Двухконтурное частотное управление
- 8. Двухконтурное частотное управление При настройке регулятора WРС и WРТ требуется линеаризовать двигатель Показатели Относительно высокая точность
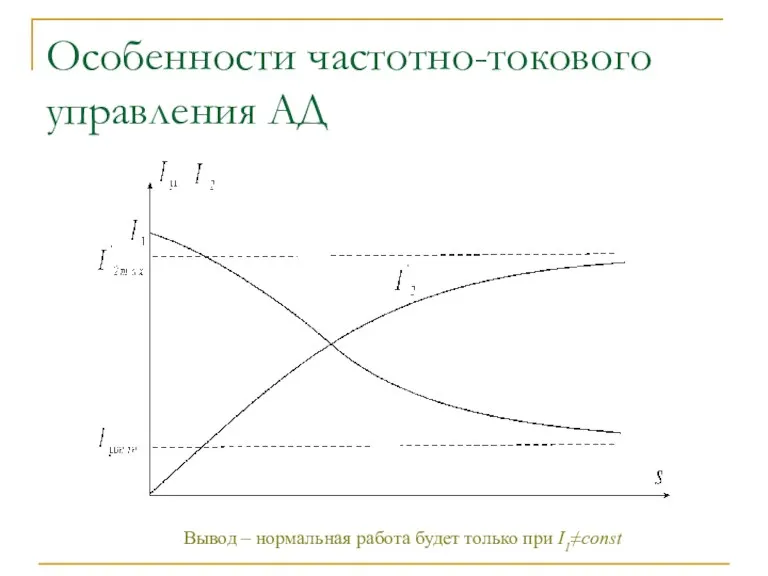
- 9. Особенности частотно-токового управления АД Проекция вектора тока намагничивания на вектор тока статора определяет какая часть тока
- 10. Особенности частотно-токового управления АД Вывод – нормальная работа будет только при I1≠const
- 11. Особенности частотно-токового управления АД В СУЭП с частотно-токовым управлением должны быть ФПА – функциональный преобразователь амплитуды
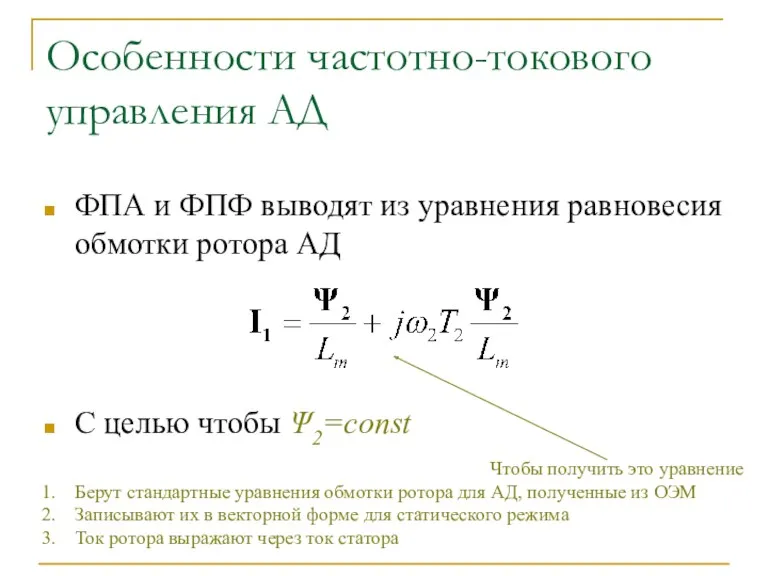
- 12. Особенности частотно-токового управления АД ФПА и ФПФ выводят из уравнения равновесия обмотки ротора АД С целью
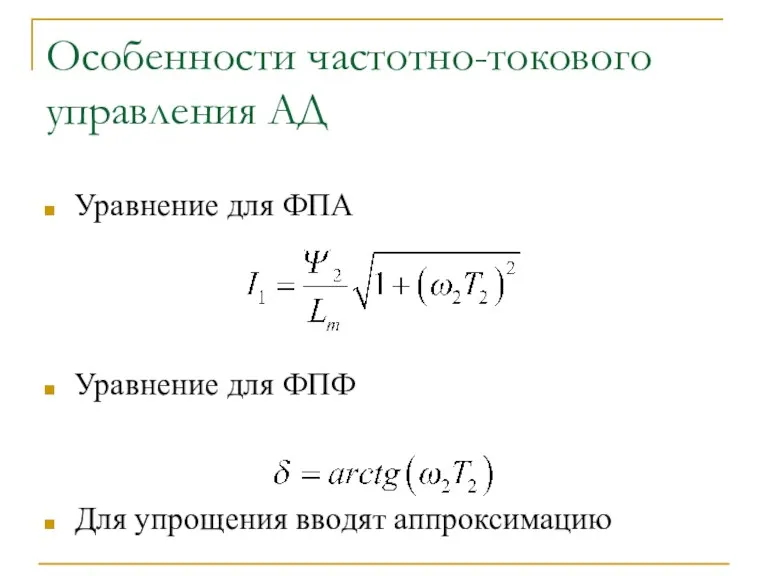
- 13. Особенности частотно-токового управления АД Уравнение для ФПА Уравнение для ФПФ Для упрощения вводят аппроксимацию
- 14. Особенности частотно-токового управления АД 1 – точная аппроксимация 2 – грубая аппроксимация
- 15. Частотно-токовое управление на базе инвертора тока
- 16. Частотно-токовое управление на базе инвертора тока Обратите внимание – хоть в схеме и ПЧ, управляем выпрямителем.
- 17. Частотно-токовое управление на базе инвертора тока Для определения WРС надо линеаризовать АД Отличаются от частотного управления
- 18. Частотно-токовое управление на базе инвертора тока Показатели Диапазон регулирования D=15..20:1 Высокая точность Относительно невысокие динамические показатели
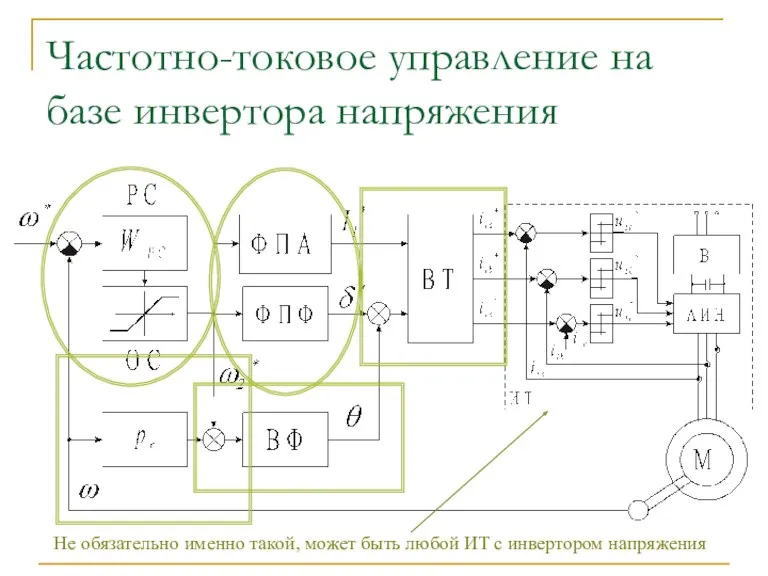
- 19. Частотно-токовое управление на базе инвертора напряжения Не обязательно именно такой, может быть любой ИТ с инвертором
- 20. Частотно-токовое управление на базе инвертора напряжения Вычислитель фазы ВФ определяет текущее положение вектора тока статора I1
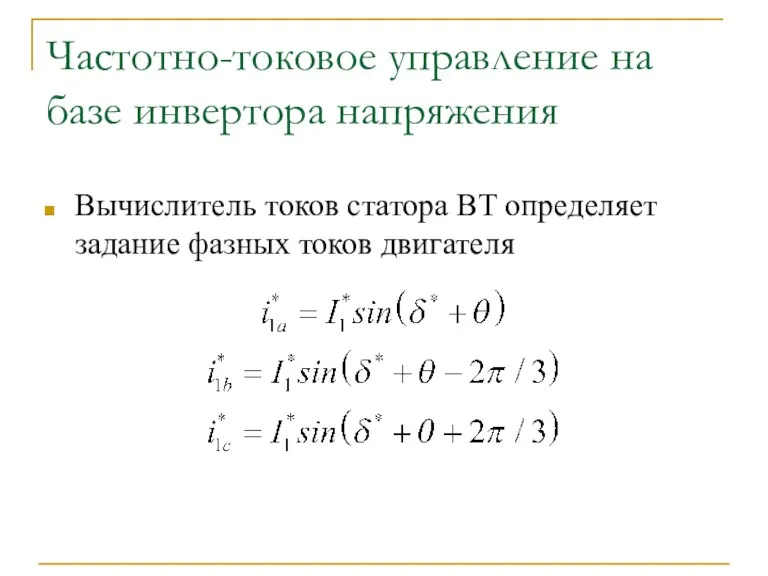
- 21. Частотно-токовое управление на базе инвертора напряжения Вычислитель токов статора ВТ определяет задание фазных токов двигателя
- 22. Частотно-токовое управление на базе инвертора напряжения Достигается еще большая перегрузочная способность, чем с инвертором тока Регулятор
- 23. Машины двойного питания В разомкнутом варианте М ω ω0 f2 = 0 ω0 э1 ω0 э2
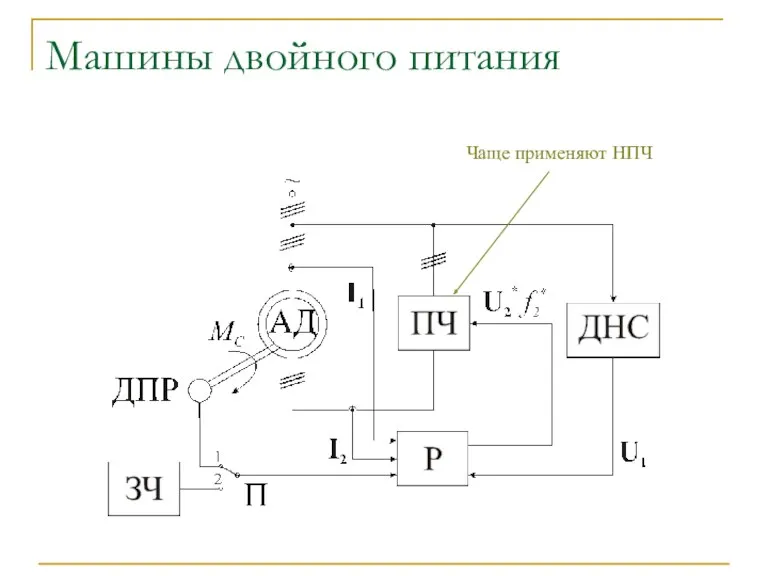
- 24. Машины двойного питания Чаще применяют НПЧ
- 25. Машины двойного питания В режиме 2 Работа в синхронном режиме МХ абсолютно жесткие В режиме 1
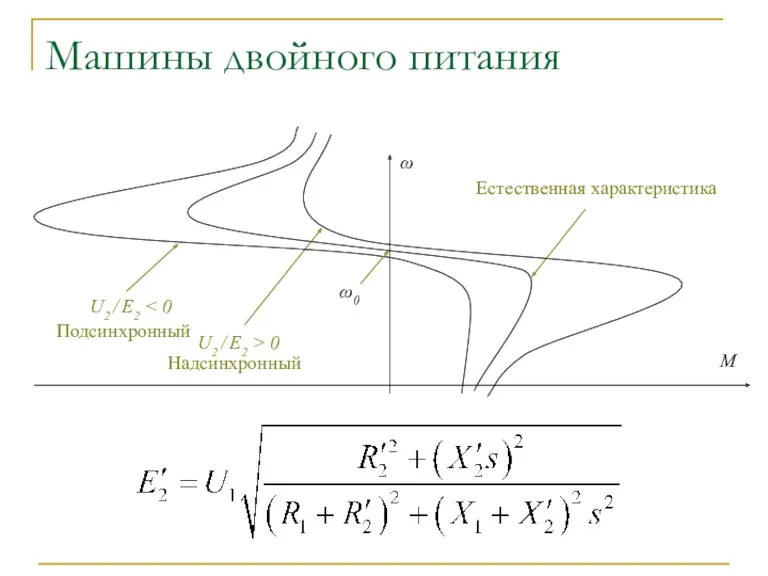
- 26. Машины двойного питания М ω ω0 U2 / E2 > 0 Естественная характеристика U2 / E2
- 27. Машины двойного питания Способы пуска Асинхронный пуск в положении 1 с переключением в положение 2 после
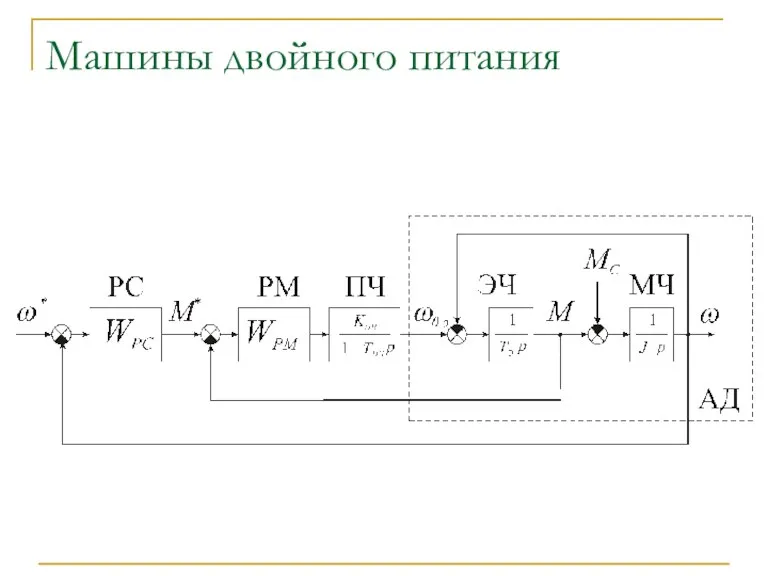
- 28. Машины двойного питания Для регулирования скорости возможна надстройка предложенной структуры Вместо ЗЧ в режиме 2 использовать
- 29. Машины двойного питания
- 30. Машины двойного питания Достигается высокий коэффициент мощности При выходе из строя ПЧ возможна работа МДП в
- 32. Скачать презентацию
Скалярное частотное управление
Важно помнить –
Менять только f1 без U1 нельзя
Законы частотного
Скалярное частотное управление
Важно помнить –
Менять только f1 без U1 нельзя
Законы частотного
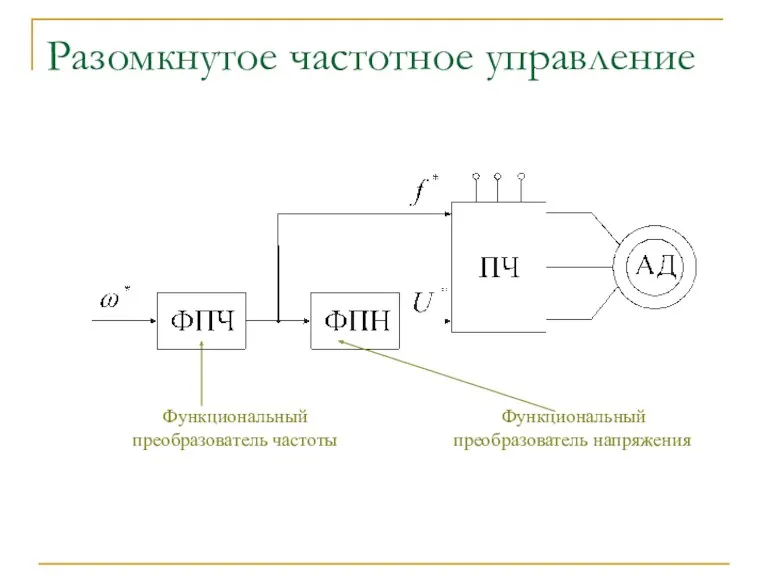
Разомкнутое частотное управление
Функциональный
преобразователь напряжения
Функциональный
преобразователь частоты
Разомкнутое частотное управление
Функциональный
преобразователь напряжения
Функциональный
преобразователь частоты
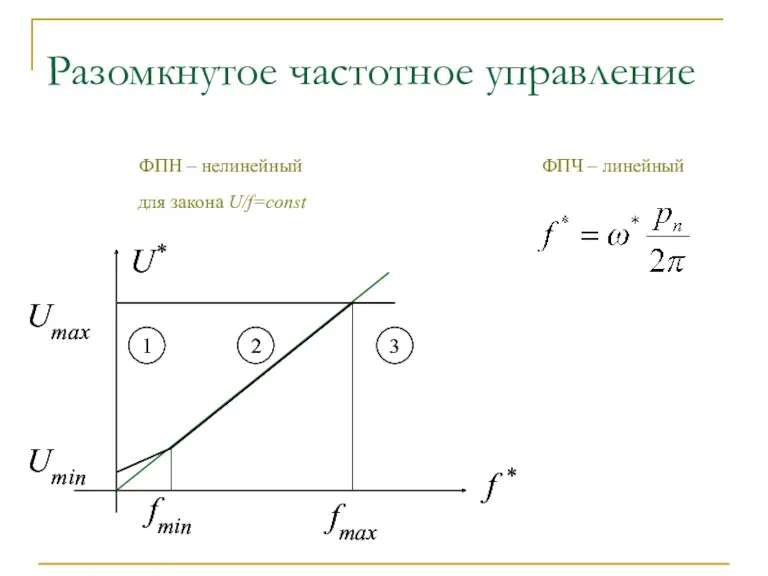
Разомкнутое частотное управление
ФПН – нелинейный
ФПЧ – линейный
для закона U/f=const
Разомкнутое частотное управление
ФПН – нелинейный
ФПЧ – линейный
для закона U/f=const
Разомкнутое частотное управление
Показатели
Диапазон регулирования D=8..10:1
Невысокая точность
Очень невысокие динамические показатели регулирования
Нужно вводить
Разомкнутое частотное управление
Показатели
Диапазон регулирования D=8..10:1
Невысокая точность
Очень невысокие динамические показатели регулирования
Нужно вводить
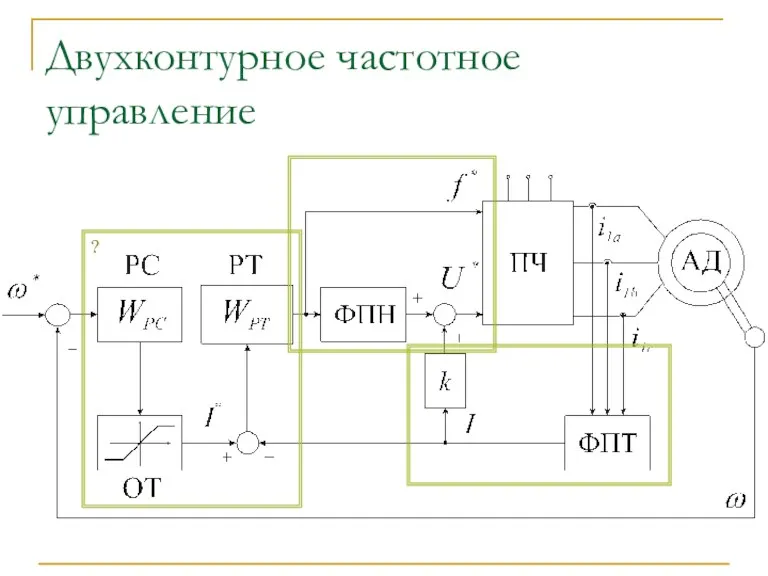
Двухконтурное частотное управление
?
Двухконтурное частотное управление
?
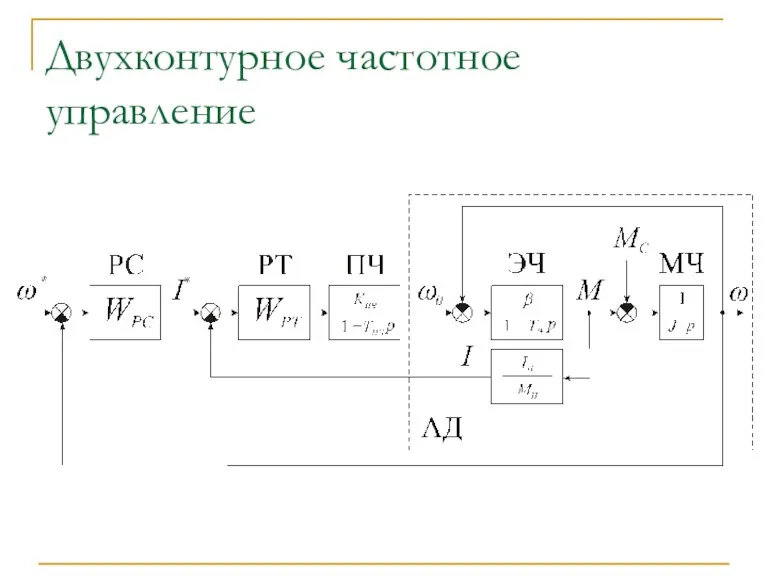
Двухконтурное частотное управление
Двухконтурное частотное управление
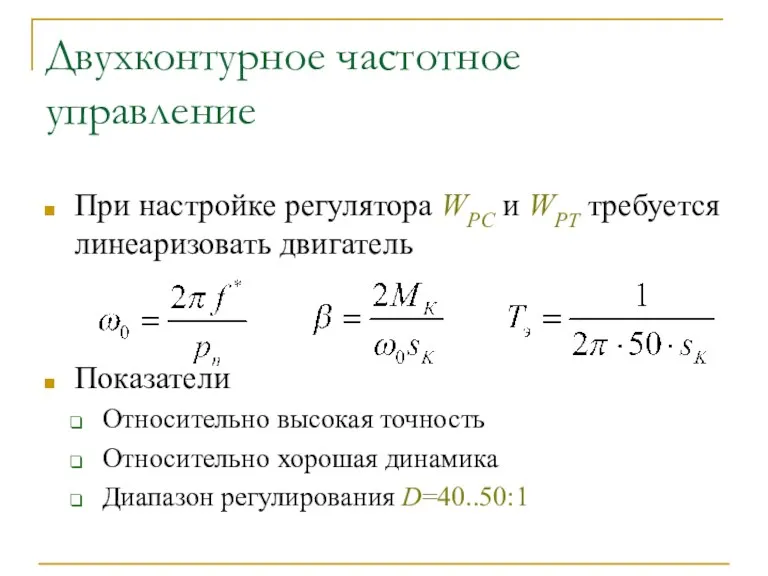
Двухконтурное частотное управление
При настройке регулятора WРС и WРТ требуется линеаризовать двигатель
Показатели
Относительно
Двухконтурное частотное управление
При настройке регулятора WРС и WРТ требуется линеаризовать двигатель
Показатели
Относительно
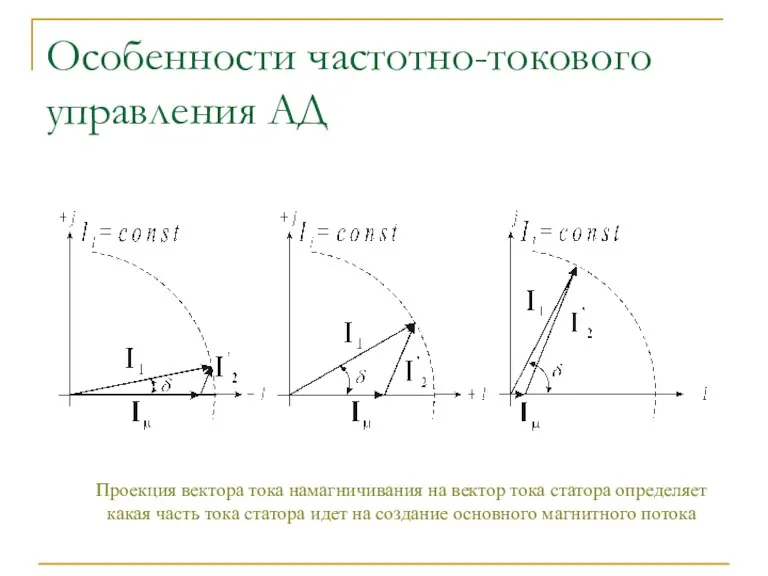
Особенности частотно-токового управления АД
Проекция вектора тока намагничивания на вектор тока статора
Особенности частотно-токового управления АД
Проекция вектора тока намагничивания на вектор тока статора
Особенности частотно-токового управления АД
Вывод – нормальная работа будет только при I1≠const
Особенности частотно-токового управления АД
Вывод – нормальная работа будет только при I1≠const
Особенности частотно-токового управления АД
В СУЭП с частотно-токовым управлением должны быть
ФПА –
Особенности частотно-токового управления АД
В СУЭП с частотно-токовым управлением должны быть
ФПА –
Особенности частотно-токового управления АД
ФПА и ФПФ выводят из уравнения равновесия обмотки
Особенности частотно-токового управления АД
ФПА и ФПФ выводят из уравнения равновесия обмотки
Особенности частотно-токового управления АД
Уравнение для ФПА
Уравнение для ФПФ
Для упрощения вводят аппроксимацию
Особенности частотно-токового управления АД
Уравнение для ФПА
Уравнение для ФПФ
Для упрощения вводят аппроксимацию
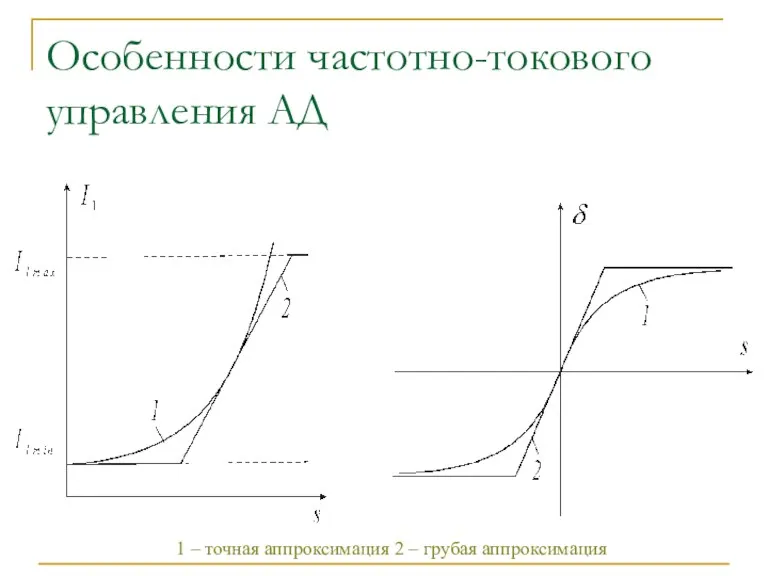
Особенности частотно-токового управления АД
1 – точная аппроксимация 2 – грубая аппроксимация
Особенности частотно-токового управления АД
1 – точная аппроксимация 2 – грубая аппроксимация
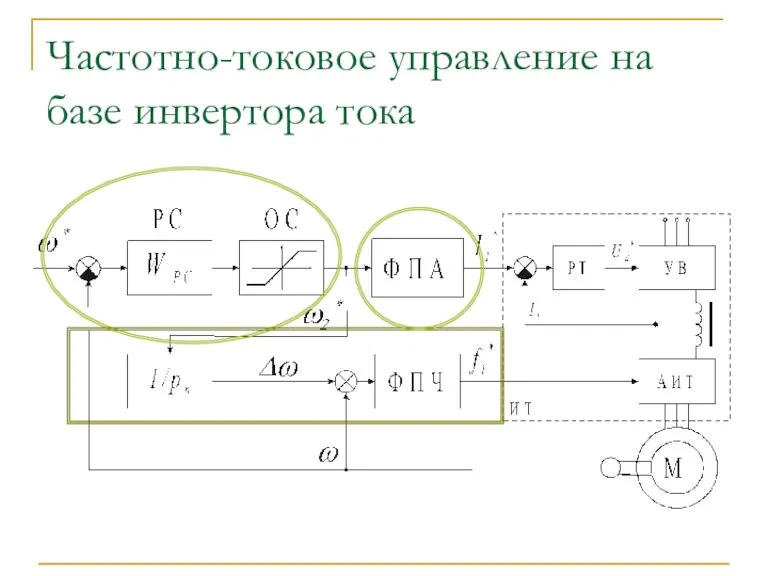
Частотно-токовое управление на базе инвертора тока
Частотно-токовое управление на базе инвертора тока

Частотно-токовое управление на базе инвертора тока
Обратите внимание – хоть в схеме
Частотно-токовое управление на базе инвертора тока
Обратите внимание – хоть в схеме
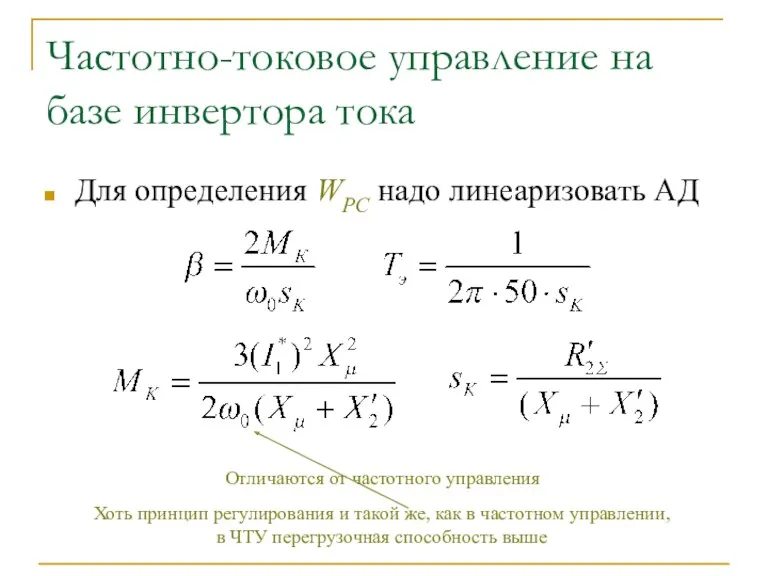
Частотно-токовое управление на базе инвертора тока
Для определения WРС надо линеаризовать АД
Отличаются
Частотно-токовое управление на базе инвертора тока
Для определения WРС надо линеаризовать АД
Отличаются
Частотно-токовое управление на базе инвертора тока
Показатели
Диапазон регулирования D=15..20:1
Высокая точность
Относительно невысокие динамические
Частотно-токовое управление на базе инвертора тока
Показатели
Диапазон регулирования D=15..20:1
Высокая точность
Относительно невысокие динамические
Частотно-токовое управление на базе инвертора напряжения
Не обязательно именно такой, может быть
Частотно-токовое управление на базе инвертора напряжения
Не обязательно именно такой, может быть
Частотно-токовое управление на базе инвертора напряжения
Вычислитель фазы ВФ определяет текущее положение
Частотно-токовое управление на базе инвертора напряжения
Вычислитель фазы ВФ определяет текущее положение
Частотно-токовое управление на базе инвертора напряжения
Вычислитель токов статора ВТ определяет задание
Частотно-токовое управление на базе инвертора напряжения
Вычислитель токов статора ВТ определяет задание
Частотно-токовое управление на базе инвертора напряжения
Достигается еще большая перегрузочная способность, чем
Частотно-токовое управление на базе инвертора напряжения
Достигается еще большая перегрузочная способность, чем

Машины двойного питания
В разомкнутом варианте
М
ω
ω0
f2 = 0
ω0 э1
ω0 э2
ω0 э3
f2’ ≠
Машины двойного питания
В разомкнутом варианте
М
ω
ω0
f2 = 0
ω0 э1
ω0 э2
ω0 э3
f2’ ≠
Машины двойного питания
Чаще применяют НПЧ
Машины двойного питания
Чаще применяют НПЧ
Машины двойного питания
В режиме 2
Работа в синхронном режиме
МХ абсолютно жесткие
В режиме
Машины двойного питания
В режиме 2
Работа в синхронном режиме
МХ абсолютно жесткие
В режиме
Машины двойного питания
М
ω
ω0
U2 / E2 > 0
Естественная характеристика
U2 / E2 <
Машины двойного питания
М
ω
ω0
U2 / E2 > 0
Естественная характеристика
U2 / E2 <
Машины двойного питания
Способы пуска
Асинхронный пуск в положении 1 с переключением в
Машины двойного питания
Способы пуска
Асинхронный пуск в положении 1 с переключением в
Машины двойного питания
Для регулирования скорости возможна надстройка предложенной структуры
Вместо ЗЧ в
Машины двойного питания
Для регулирования скорости возможна надстройка предложенной структуры
Вместо ЗЧ в
Машины двойного питания
Машины двойного питания
Машины двойного питания
Достигается высокий коэффициент мощности
При выходе из строя ПЧ возможна
Машины двойного питания
Достигается высокий коэффициент мощности
При выходе из строя ПЧ возможна
 Особые типы магматических формаций. Формации расслоенных интрузивов ультраосновных и основных пород
Особые типы магматических формаций. Формации расслоенных интрузивов ультраосновных и основных пород Участие в фестивале знай наших!. Сказка Колобок. Презентация.
Участие в фестивале знай наших!. Сказка Колобок. Презентация. 20231031_prezentatsiya_po_biologii_na_temu_metody_izucheniya_zhivoy_prirody-izmerenie.5_klass
20231031_prezentatsiya_po_biologii_na_temu_metody_izucheniya_zhivoy_prirody-izmerenie.5_klass Рисуем череп по канону художников древней Греции
Рисуем череп по канону художников древней Греции Microbus Riddle
Microbus Riddle Антиколониальное движение в Индии
Антиколониальное движение в Индии Презентация Весёлая гимнастика для язычка часть1
Презентация Весёлая гимнастика для язычка часть1 Математика в наших будущих профессиях
Математика в наших будущих профессиях День мамы
День мамы Проектирование релейной защиты и автоматики ЦПС 220/110/10 кВ с программной реализацией алгоритма АЛАР
Проектирование релейной защиты и автоматики ЦПС 220/110/10 кВ с программной реализацией алгоритма АЛАР Пособие по безработице: понятие, размеры и сроки выплат
Пособие по безработице: понятие, размеры и сроки выплат Понятие о тракторе. Классификация и общее устройство тракторов
Понятие о тракторе. Классификация и общее устройство тракторов Памятники Донецка
Памятники Донецка Внешняя политика. Русско-японская война 1904-1905 гг
Внешняя политика. Русско-японская война 1904-1905 гг Инфракрасное и ультрафиолетовое излучения
Инфракрасное и ультрафиолетовое излучения ДНК, РНК, АТФ. Окружающий мир. 5 класс
ДНК, РНК, АТФ. Окружающий мир. 5 класс Material Formats
Material Formats Бумажный креатив
Бумажный креатив Цифровой образовательный ресурс Перелетные птицы(ЦОР)
Цифровой образовательный ресурс Перелетные птицы(ЦОР) Культура и искусство Древнего Рима
Культура и искусство Древнего Рима Российская нефтяная компания ПАО Татнефть
Российская нефтяная компания ПАО Татнефть Что такое эмоции и зачем они нужны. Программа для дошкольников
Что такое эмоции и зачем они нужны. Программа для дошкольников Siemens. Strength 7SJ61 - ABB REF 610 feeder protection
Siemens. Strength 7SJ61 - ABB REF 610 feeder protection Публичная презентация общественности и профессиональному сообществу результатов педагогической деятельности
Публичная презентация общественности и профессиональному сообществу результатов педагогической деятельности Первоначальные попытки классификации химических элементов. Понятие о группах сходных элементов
Первоначальные попытки классификации химических элементов. Понятие о группах сходных элементов презентация Эхо войны
презентация Эхо войны Факторинговые операции коммерческих банков
Факторинговые операции коммерческих банков Japanese Culture!
Japanese Culture!