Тема №2. Автоматизация вторичной обработки РЛИ. Занятие №1. Общие сведения о вторичной обработке РЛИ презентация
- Тема №2. Автоматизация вторичной обработки РЛИ. Занятие №1. Общие сведения о вторичной обработке РЛИ

Содержание
- 2. Первичная обработка информации - обработка радиолокационных сигналов, поступающих с выхода приемного устройства РЛС за один обзор
- 3. Результатом решения задач ПОИ являются сформированные отметки, которые выдаются с УПО на ЭВМ ВОИ КСА для
- 4. наличие ложных отметок и пропуски целей; ошибки определения координат ЛО; дискретный характер и «старение» сведений о
- 5. Противоречие между потребностью АКП соединения ВКС, частей и подразделений РТВ, ЗРВ и ИА в информации о
- 6. Учебные вопросы: Сущность и задачи вторичной обработки РЛИ. Операции вторичной обработки РЛИ. Показатели качества вторичной обработки
- 7. ЛИТЕРАТУРА В.Н. Ратушняка, С.В. Бейльман, И.В. Тяпкин. Основы обработки и передачи информации в автоматизированных системах управления.
- 8. Учебный вопрос № 1 Сущность и задачи вторичной обработки РЛИ.
- 9. снимается в процессе вторичной обработки радиолокационной информации (ВОИ РЛИ). Противоречие между потребностью АКП соединения ВКС, частей
- 10. Вторичная обработка информации – обработка радиолокационных сигналов, поступающих с выхода приемного устройства одной и той же
- 11. На этапе обнаружения траектории решается одноименная задача. в принятии решения (гипотезы) о наличии в пространстве движущегося
- 12. Сопровождение траектории в регулярной привязке вновь поступающих координатных точек к траекториям сопровождаемых локационных объектов. заключается 11
- 13. Характеризуя ЗАДАЧУ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ, отметим, что представляется её параметрами в дискретные моменты времени. при ВОИ
- 14. В этой связи отметим, что на качество оценки координат при ПОИ оказывают влияние два фактора. Первый
- 15. Отбор КТ к своим траекториям при ВОИ позволяет: Вести совместную обработку всей совокупности КТ, пред-ставляющих траекторию
- 16. Характеризуя ЗАДАЧУ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЛО, напомним, что Указанные характеристики в интересах потребителя дополняются данными о номерах
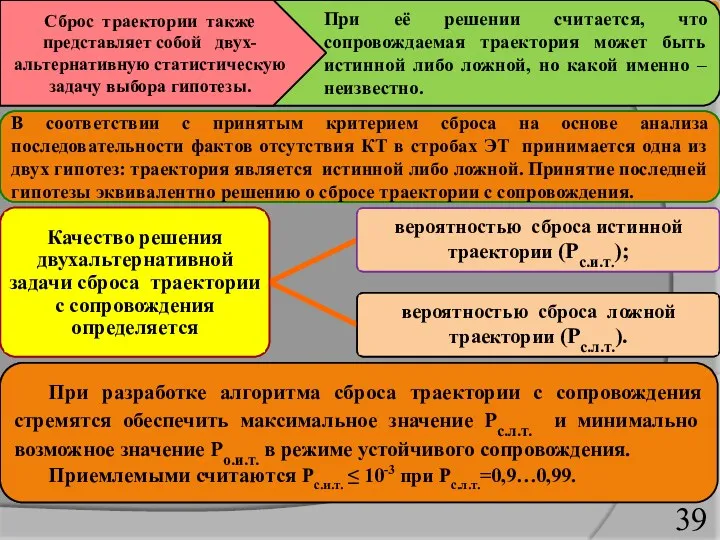
- 17. Сброс траектории завершает этап её сопровождения регулярной проверке верности гипотезы «траектория ложная». Основным критерием при принятии
- 18. Учебный вопрос № 2 Основные операции вторичной обработки РЛИ
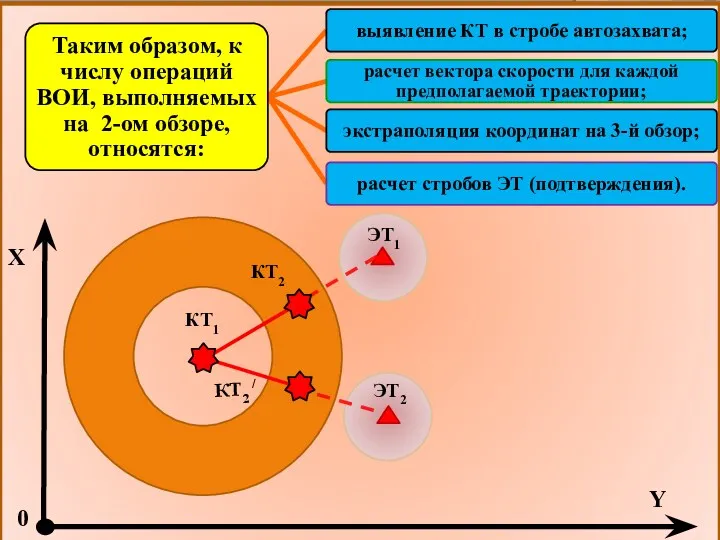
- 19. задачи ВОИ решаются во взаимосвязи друг с другом по определенному алгоритму, операции которого будут рассмотрены в
- 20. Обнаружение траектории начинается при поступлении из УПО на ЭВМ ВОИ КСА координатной точки КТ1, которая не
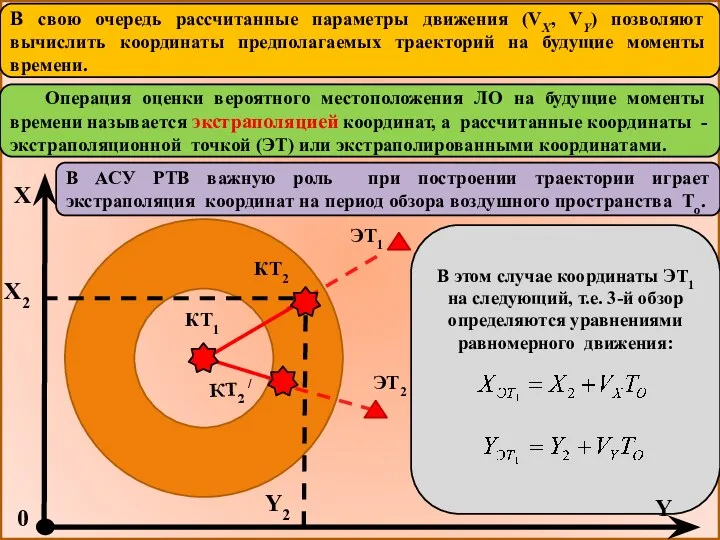
- 21. Так, например, для пары КТ1-КТ2 составляющие вектора скорости определяются выражениями Из изложенного следует, что на 1-ом
- 22. ЭТ2 КТ2 / ЭТ1 В свою очередь рассчитанные параметры движения (VX, VY) позволяют вычислить координаты предполагаемых
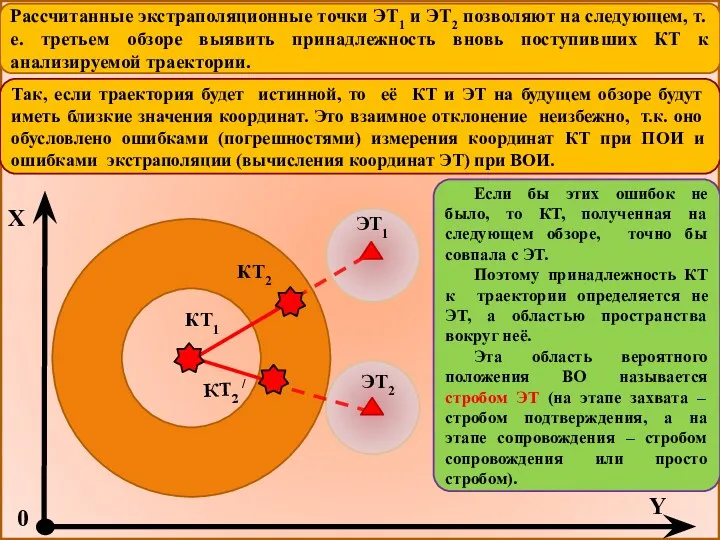
- 23. ЭТ2 КТ2 / ЭТ1 Рассчитанные экстраполяционные точки ЭТ1 и ЭТ2 позволяют на следующем, т.е. третьем обзоре
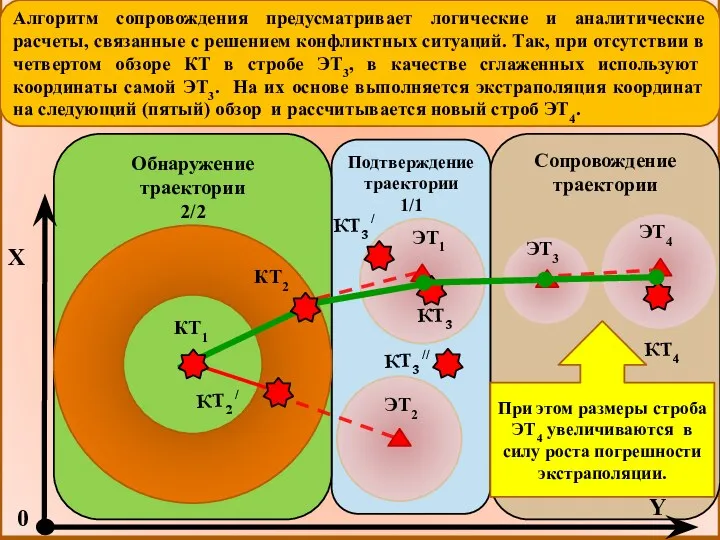
- 24. Несмотря на эти факторы, стробы ЭТ по сравнению со стробом автозахвата имеют меньшие размеры, т.к. экстраполированные
- 25. ЭТ2 КТ2 / ЭТ1 КТ1 Y X 0 КТ2
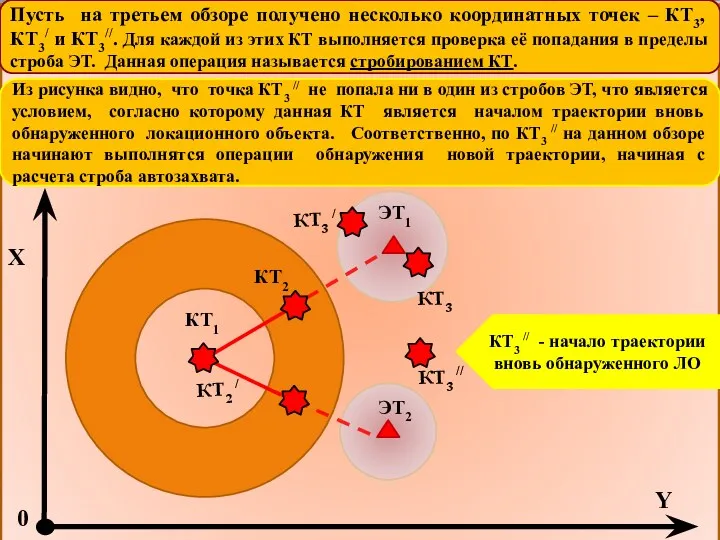
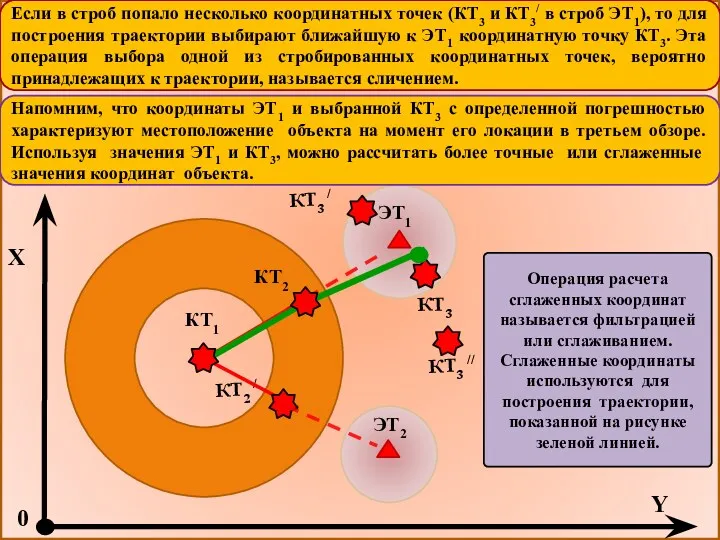
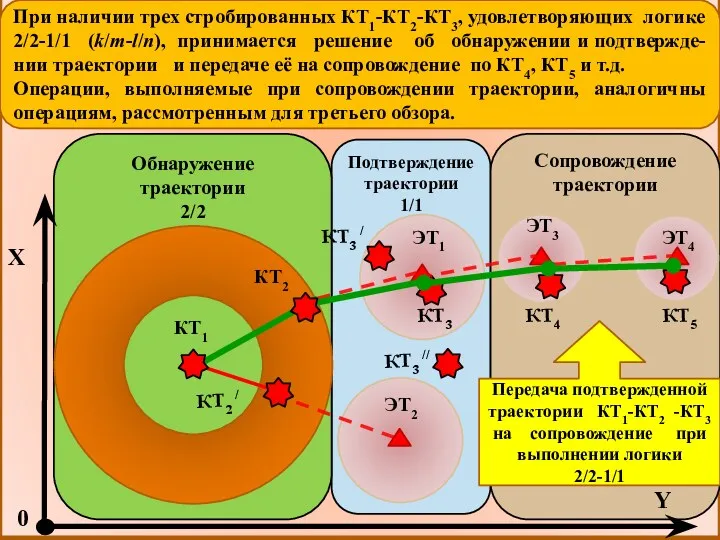
- 26. ЭТ2 КТ2 / ЭТ1 Пусть на третьем обзоре получено несколько координатных точек – КТ3, КТ3/ и
- 27. ЭТ2 КТ2 / ЭТ1 Если в строб попало несколько координатных точек (КТ3 и КТ3/ в строб
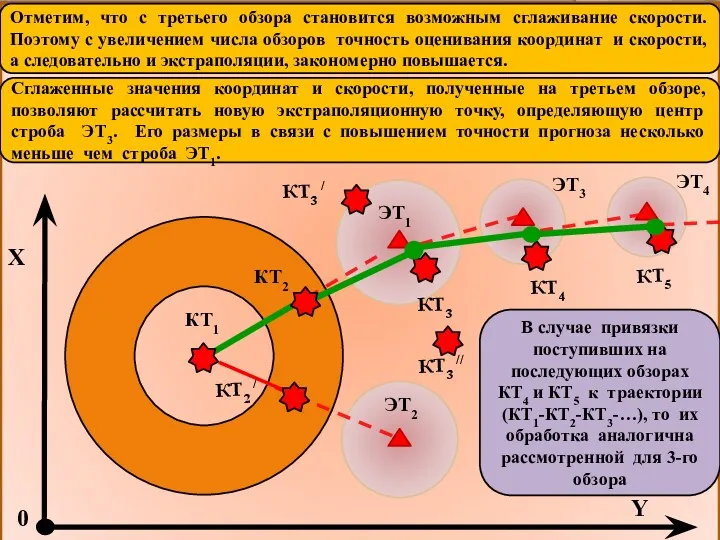
- 28. ЭТ2 КТ2 / ЭТ1 Отметим, что с третьего обзора становится возможным сглаживание скорости. Поэтому с увеличением
- 29. ЭТ2 КТ2 / ЭТ1 КТ1 Y X 0 КТ2 КТ3 // КТ3 / КТ3 ЭТ3 КТ4
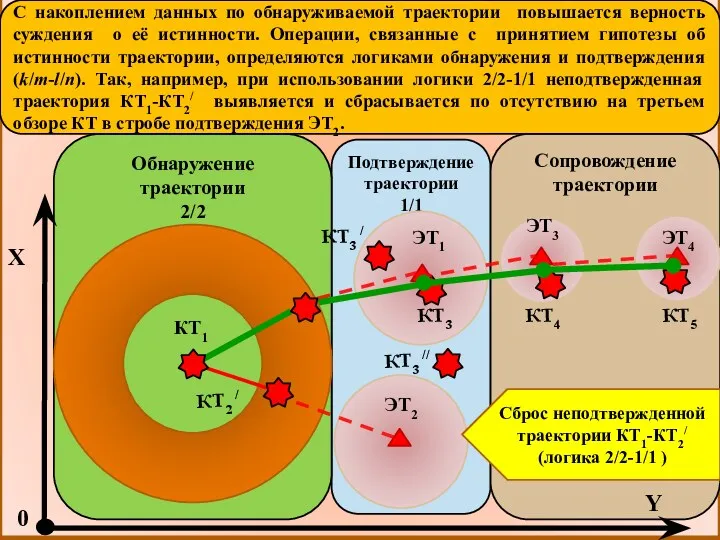
- 30. Сопровождение траектории Подтверждение траектории 1/1 Обнаружение траектории 2/2 ЭТ2 КТ2 / ЭТ1 КТ1 Y X 0
- 31. Сопровождение траектории Подтверждение траектории 1/1 Обнаружение траектории 2/2 ЭТ2 КТ2 / ЭТ1 КТ1 Y X 0
- 32. Сопровождение траектории Подтверждение траектории 1/1 Обнаружение траектории 2/2 ЭТ2 КТ2 / ЭТ1 КТ1 Y X 0
- 33. наблюдается регулярное отсутствие стробированных КТ, то принимается решение о её сбросе. Если при сопровождении траектории Выполняемые
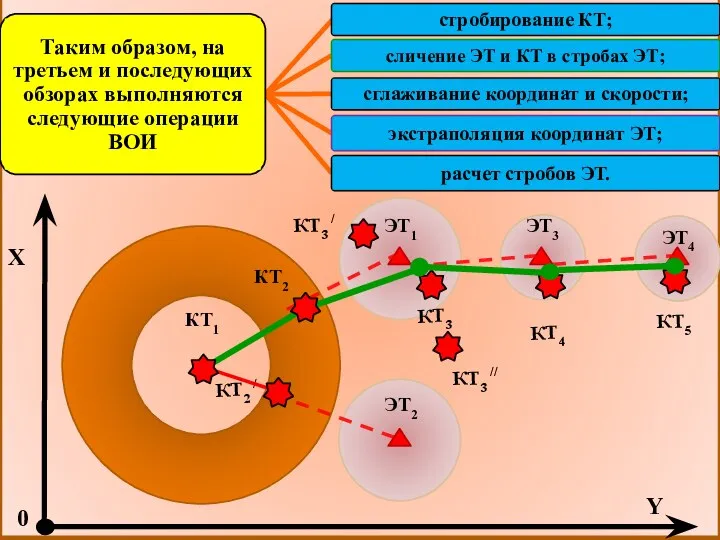
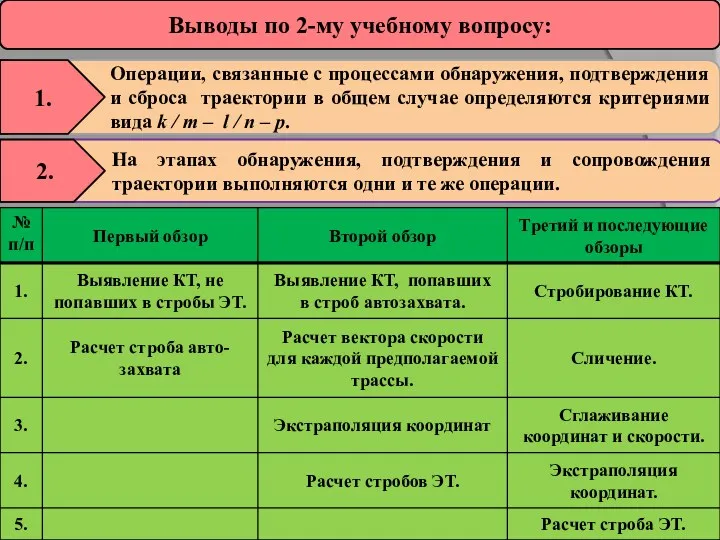
- 34. Выводы по 2-му учебному вопросу: Операции, связанные с процессами обнаружения, подтверждения и сброса траектории в общем
- 35. Учебный вопрос № 3 Показатели качества вторичной обработки информации
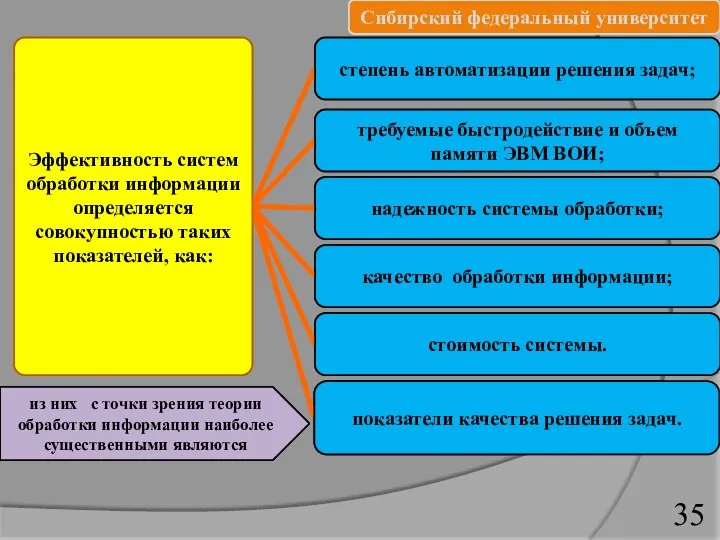
- 36. качество обработки информации; степень автоматизации решения задач; требуемые быстродействие и объем памяти ЭВМ ВОИ; надежность системы
- 37. Исходными данными для решения перечисленных задач являются координатные точки, сформированные в УПО и поступившие из него
- 38. Истинные КТ, представляющие координаты обнаруженных ЛО, содержат случайную погрешность их измерения, а ложные КТ, обусловленные помехами,
- 39. в ходе которой на основе анализа совокупности КТ, истинность и ложность которых неизвест-ны, должно быть принято
- 40. При её решении считается, что сопровождаемая траектория может быть истинной либо ложной, но какой именно –
- 41. по методу своего решения весьма близки к рассмотренным выше задачам. Задачи определения характеристик ЛО Данные задачи
- 42. решается задача оценивания (сглаживания) её параметров. На этапе сопровождения траектории ЛО Динамические ошибки возникают при маневре
- 43. Выводы по 3-му учебному вопросу: Показателями качества ВОИ являются: 1. 42
- 44. На практике применяют обобщенный метод оценки качества выполнения задач ВОИ, в основе которого лежит поглощение одних
- 45. Общие выводы 44
- 46. Вопросы на самоподготовку: В чем заключается сущность и причинная обусловленность ВОИ? В чем заключается специфика задачи
- 48. Скачать презентацию
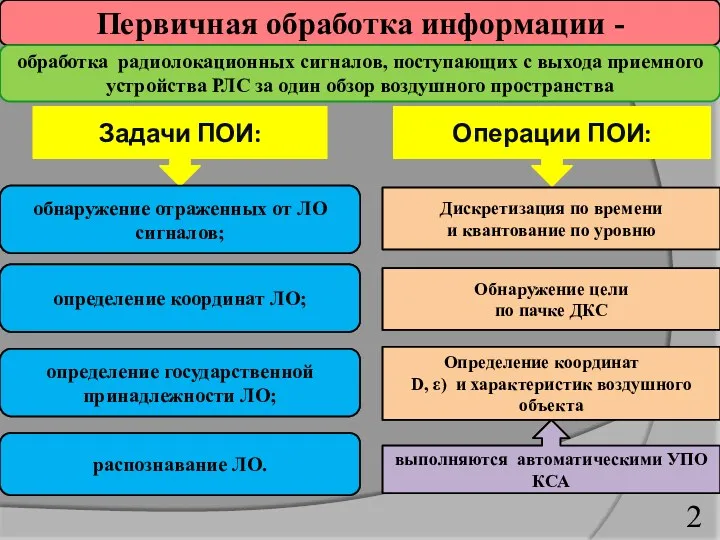
Первичная обработка информации -
обработка радиолокационных сигналов, поступающих с выхода приемного устройства
Первичная обработка информации -
обработка радиолокационных сигналов, поступающих с выхода приемного устройства
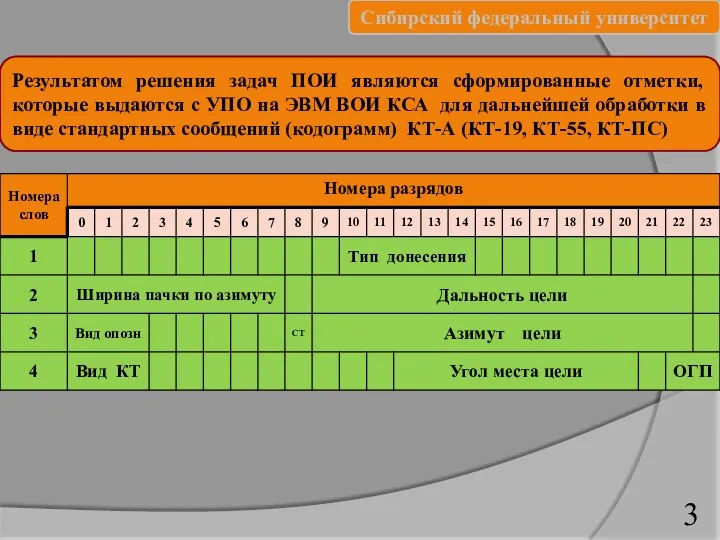
Результатом решения задач ПОИ являются сформированные отметки, которые выдаются с УПО
Результатом решения задач ПОИ являются сформированные отметки, которые выдаются с УПО

наличие ложных отметок и пропуски целей;
ошибки определения координат ЛО;
дискретный характер и
наличие ложных отметок и пропуски целей;
ошибки определения координат ЛО;
дискретный характер и

Противоречие между потребностью АКП соединения ВКС, частей и подразделений РТВ, ЗРВ
Учебные вопросы:
Сущность и задачи вторичной обработки РЛИ.
Операции вторичной обработки РЛИ.
Показатели качества
Учебные вопросы:
Сущность и задачи вторичной обработки РЛИ.
Операции вторичной обработки РЛИ.
Показатели качества
ЛИТЕРАТУРА
В.Н. Ратушняка, С.В. Бейльман, И.В. Тяпкин. Основы обработки и передачи информации
ЛИТЕРАТУРА
В.Н. Ратушняка, С.В. Бейльман, И.В. Тяпкин. Основы обработки и передачи информации
Учебный вопрос № 1
Сущность и задачи вторичной обработки РЛИ.
Учебный вопрос № 1
Сущность и задачи вторичной обработки РЛИ.
снимается в процессе вторичной обработки радиолокационной информации (ВОИ РЛИ).
Противоречие между потребностью
снимается в процессе вторичной обработки радиолокационной информации (ВОИ РЛИ).
Противоречие между потребностью

Вторичная обработка информации –
обработка радиолокационных сигналов, поступающих с выхода приемного
Вторичная обработка информации –
обработка радиолокационных сигналов, поступающих с выхода приемного
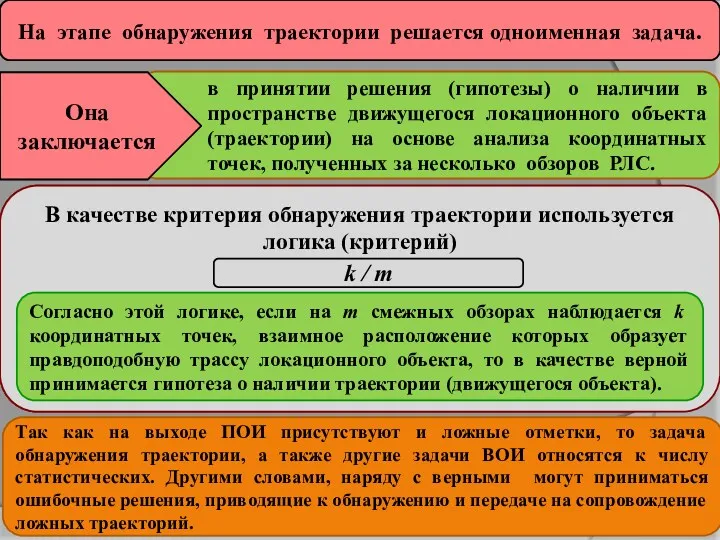
На этапе обнаружения траектории решается одноименная задача.
в принятии решения (гипотезы) о
На этапе обнаружения траектории решается одноименная задача.
в принятии решения (гипотезы) о
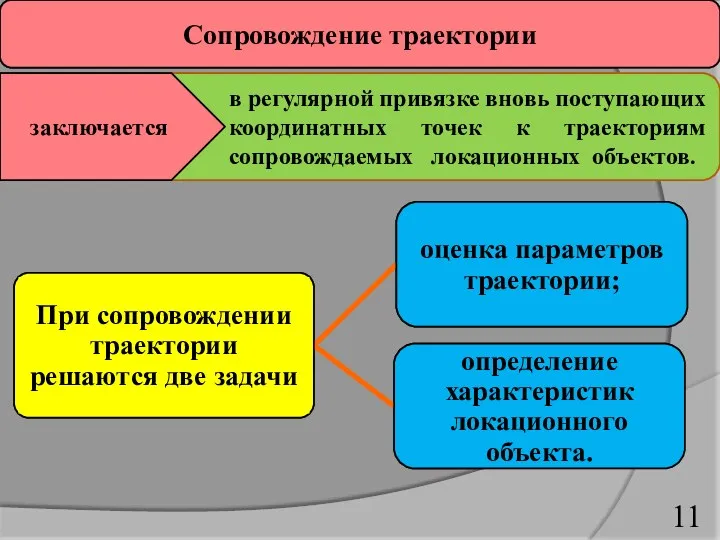
Сопровождение траектории
в регулярной привязке вновь поступающих координатных точек к траекториям
Сопровождение траектории
в регулярной привязке вновь поступающих координатных точек к траекториям
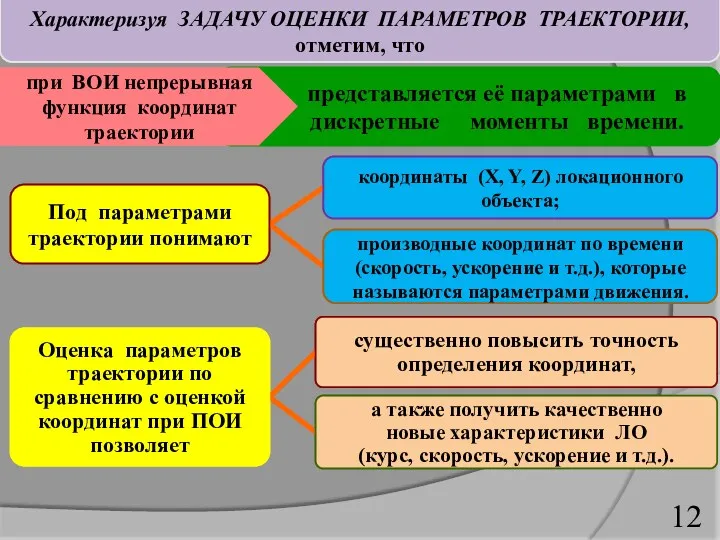
Характеризуя ЗАДАЧУ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ, отметим, что
представляется её параметрами в дискретные
представляется её параметрами в дискретные
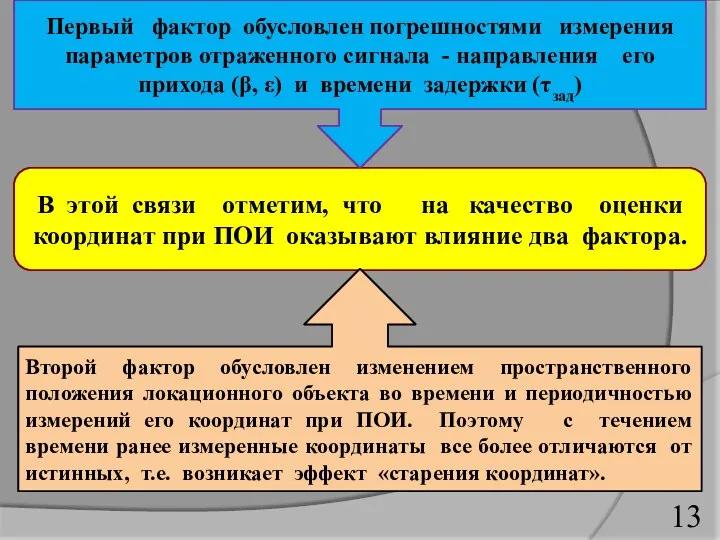
В этой связи отметим, что на качество оценки координат при ПОИ
В этой связи отметим, что на качество оценки координат при ПОИ
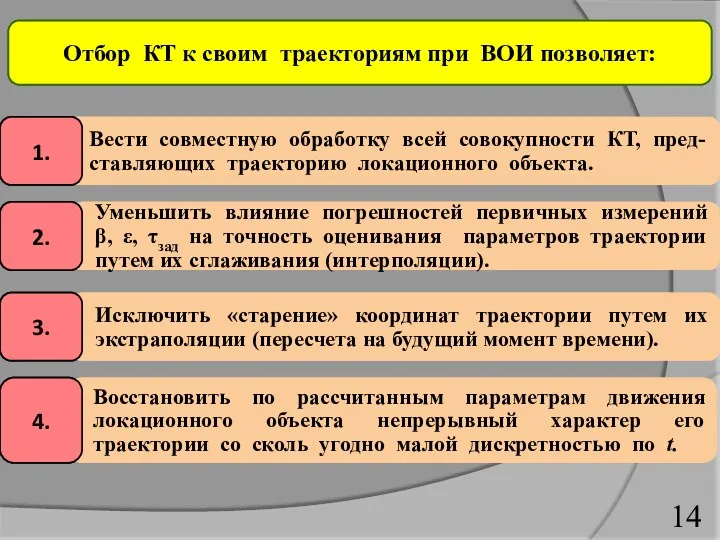
Отбор КТ к своим траекториям при ВОИ позволяет:
Вести совместную обработку всей
Отбор КТ к своим траекториям при ВОИ позволяет:
Вести совместную обработку всей
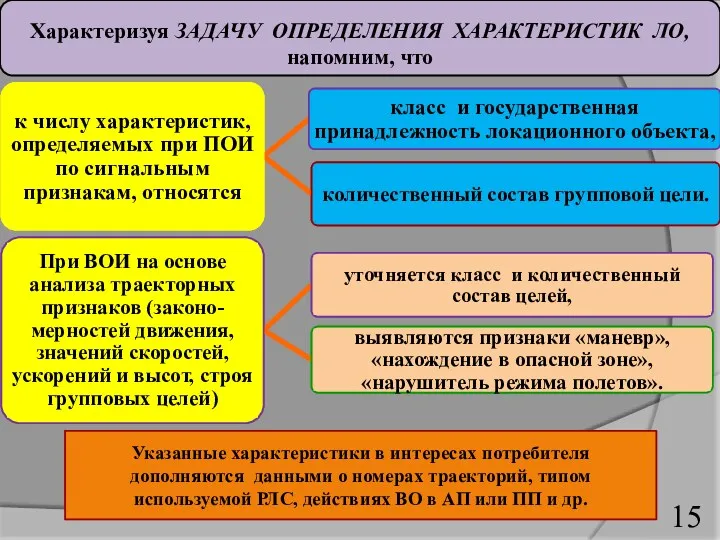
Характеризуя ЗАДАЧУ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ЛО, напомним, что
Указанные характеристики в интересах потребителя
Указанные характеристики в интересах потребителя

Сброс траектории завершает этап её сопровождения
регулярной проверке верности гипотезы «траектория ложная».
Сброс траектории завершает этап её сопровождения
регулярной проверке верности гипотезы «траектория ложная».
Учебный вопрос № 2
Основные операции вторичной обработки РЛИ
Учебный вопрос № 2
Основные операции вторичной обработки РЛИ
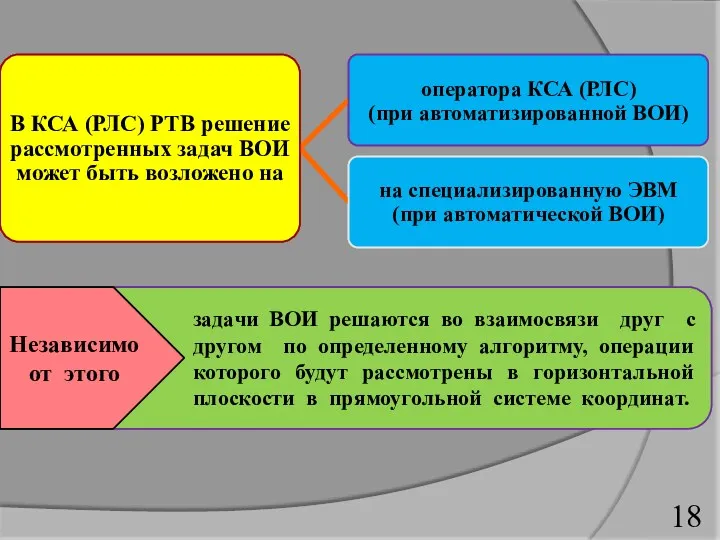
задачи ВОИ решаются во взаимосвязи друг с другом по определенному алгоритму,
задачи ВОИ решаются во взаимосвязи друг с другом по определенному алгоритму,
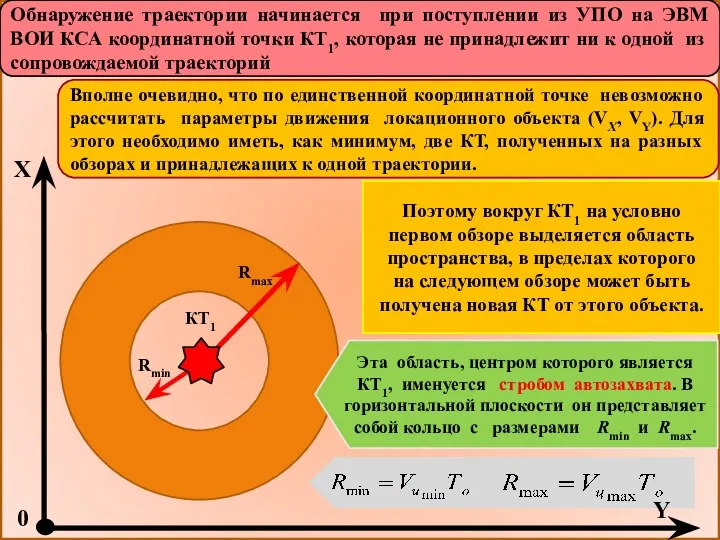
Обнаружение траектории начинается при поступлении из УПО на ЭВМ ВОИ КСА
Обнаружение траектории начинается при поступлении из УПО на ЭВМ ВОИ КСА

Так, например, для пары КТ1-КТ2 составляющие вектора скорости определяются выражениями
Из
Так, например, для пары КТ1-КТ2 составляющие вектора скорости определяются выражениями
Из
ЭТ2
КТ2 /
ЭТ1
В свою очередь рассчитанные параметры движения (VX,
ЭТ2
КТ2 /
ЭТ1
В свою очередь рассчитанные параметры движения (VX,
ЭТ2
КТ2 /
ЭТ1
Рассчитанные экстраполяционные точки ЭТ1 и ЭТ2 позволяют
ЭТ2
КТ2 /
ЭТ1
Рассчитанные экстраполяционные точки ЭТ1 и ЭТ2 позволяют
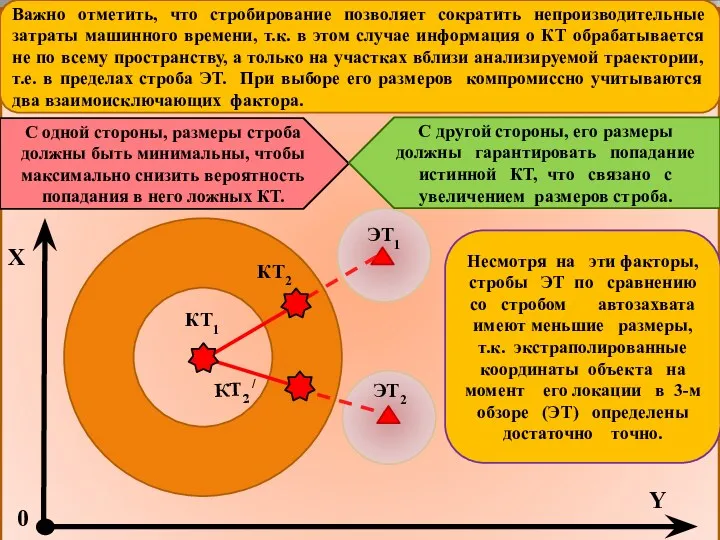
Несмотря на эти факторы, стробы ЭТ по сравнению со стробом автозахвата
Несмотря на эти факторы, стробы ЭТ по сравнению со стробом автозахвата
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
ЭТ2
КТ2 /
ЭТ1
Пусть на третьем обзоре получено несколько координатных
ЭТ2
КТ2 /
ЭТ1
Пусть на третьем обзоре получено несколько координатных
ЭТ2
КТ2 /
ЭТ1
Если в строб попало несколько координатных точек
ЭТ2
КТ2 /
ЭТ1
Если в строб попало несколько координатных точек
ЭТ2
КТ2 /
ЭТ1
Отметим, что с третьего обзора становится возможным
ЭТ2
КТ2 /
ЭТ1
Отметим, что с третьего обзора становится возможным
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3 //
КТ3 /
КТ3
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3 //
КТ3 /
КТ3
Сопровождение траектории
Подтверждение траектории 1/1
Обнаружение траектории
2/2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3
Сопровождение траектории
Подтверждение траектории 1/1
Обнаружение траектории
2/2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3
Сопровождение траектории
Подтверждение траектории 1/1
Обнаружение траектории
2/2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3
Сопровождение траектории
Подтверждение траектории 1/1
Обнаружение траектории
2/2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3
Сопровождение траектории
Подтверждение траектории 1/1
Обнаружение траектории
2/2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3
Сопровождение траектории
Подтверждение траектории 1/1
Обнаружение траектории
2/2
ЭТ2
КТ2 /
ЭТ1
КТ1
Y
X
0
КТ2
КТ3
наблюдается регулярное отсутствие стробированных КТ, то принимается решение о её сбросе.
наблюдается регулярное отсутствие стробированных КТ, то принимается решение о её сбросе.
Выводы по 2-му учебному вопросу:
Операции, связанные с процессами обнаружения, подтверждения и
Выводы по 2-му учебному вопросу:
Операции, связанные с процессами обнаружения, подтверждения и
Учебный вопрос № 3
Показатели качества вторичной обработки информации
Учебный вопрос № 3
Показатели качества вторичной обработки информации
качество обработки информации;
степень автоматизации решения задач;
требуемые быстродействие и объем памяти ЭВМ
качество обработки информации;
степень автоматизации решения задач;
требуемые быстродействие и объем памяти ЭВМ

Исходными данными для решения перечисленных задач являются координатные точки, сформированные в
Исходными данными для решения перечисленных задач являются координатные точки, сформированные в

Истинные КТ, представляющие координаты обнаруженных ЛО, содержат случайную погрешность их измерения,
а
Истинные КТ, представляющие координаты обнаруженных ЛО, содержат случайную погрешность их измерения,
а

в ходе которой на основе анализа совокупности КТ, истинность и ложность
в ходе которой на основе анализа совокупности КТ, истинность и ложность
При её решении считается, что сопровождаемая траектория может быть истинной либо
При её решении считается, что сопровождаемая траектория может быть истинной либо

по методу своего решения весьма близки к рассмотренным выше задачам.
Задачи определения
по методу своего решения весьма близки к рассмотренным выше задачам.
Задачи определения
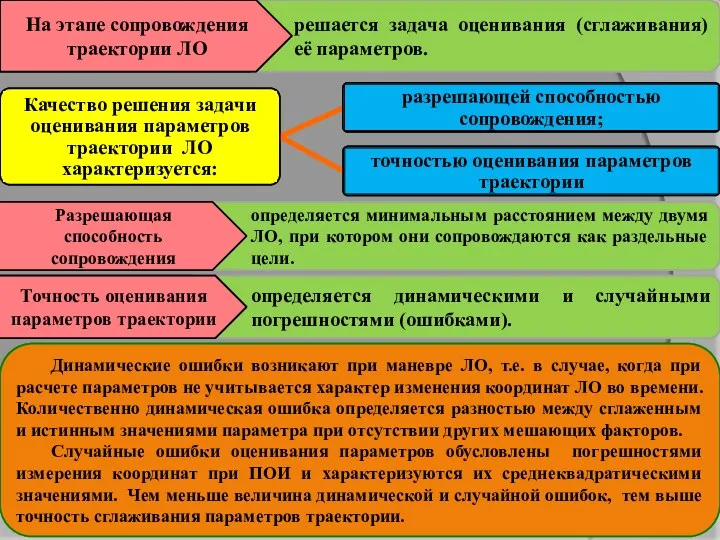
решается задача оценивания (сглаживания) её параметров.
На этапе сопровождения траектории ЛО
Динамические ошибки
решается задача оценивания (сглаживания) её параметров.
На этапе сопровождения траектории ЛО
Динамические ошибки

Выводы по 3-му учебному вопросу:
Показателями качества ВОИ являются:
1.
42
Выводы по 3-му учебному вопросу:
Показателями качества ВОИ являются:
1.
42
На практике применяют обобщенный метод оценки качества выполнения задач ВОИ, в
На практике применяют обобщенный метод оценки качества выполнения задач ВОИ, в

Общие выводы
44
Общие выводы
44
Вопросы на самоподготовку:
В чем заключается сущность и причинная обусловленность ВОИ?
В чем
Вопросы на самоподготовку:
В чем заключается сущность и причинная обусловленность ВОИ?
В чем
 Компоновка и общее устройство транспортера тягача МТ-ЛБ. (Тема 3.1)
Компоновка и общее устройство транспортера тягача МТ-ЛБ. (Тема 3.1) Основные положения по эксплуатации вооружения и техники
Основные положения по эксплуатации вооружения и техники Мотострелковые (танк) подразделении в обороне
Мотострелковые (танк) подразделении в обороне Методика подготовки и проведения общего собрания личного состава подразделения
Методика подготовки и проведения общего собрания личного состава подразделения Основы взрывного дела
Основы взрывного дела Воинская дисциплина и ответственность
Воинская дисциплина и ответственность Химическое оружие
Химическое оружие Психологическая и военно-социальная работа с военнослужащими
Психологическая и военно-социальная работа с военнослужащими Воинская обязанность и воинский учет. Служба по контракту
Воинская обязанность и воинский учет. Служба по контракту Організація та робота речового забезпечення військової частини в особливих умовах. (Тема 10.1)
Організація та робота речового забезпечення військової частини в особливих умовах. (Тема 10.1) Автомат Калашникова АК - 74
Автомат Калашникова АК - 74 Патриотизм и верность воинскому долгу – качества защитника Отечества
Патриотизм и верность воинскому долгу – качества защитника Отечества Химическое оружие
Химическое оружие Организация специальной пропаганды. Средства специальной пропаганды
Организация специальной пропаганды. Средства специальной пропаганды Движение снаряда в воздухе. Тема 2
Движение снаряда в воздухе. Тема 2 Облік особового складу
Облік особового складу Оружие массового поражения
Оружие массового поражения Бойові можливості механізованого взводу на БТР в обороні
Бойові можливості механізованого взводу на БТР в обороні The Russian nayy
The Russian nayy Автоматизация первичной обработки РЛИ
Автоматизация первичной обработки РЛИ Военная доктрина Российской Федерации. Вооруженные Силы России в структуре государственных институтов
Военная доктрина Российской Федерации. Вооруженные Силы России в структуре государственных институтов Объединенные вооруженные силы НАТО
Объединенные вооруженные силы НАТО РЛС Родник 3Д. Трехкоординатная радиолокационная станция Х-диапазона для обнаружения маловысотных воздушных объектов
РЛС Родник 3Д. Трехкоординатная радиолокационная станция Х-диапазона для обнаружения маловысотных воздушных объектов Спецназ России
Спецназ России Ядерное оружие
Ядерное оружие Тема 1. Организация и несение внутренней службы в ВС РФ. Занятие 7. Суточный наряд
Тема 1. Организация и несение внутренней службы в ВС РФ. Занятие 7. Суточный наряд 100-летие пограничных войск. 1918-2018
100-летие пограничных войск. 1918-2018 История создания химического оружия
История создания химического оружия