- Зенитные управляемые ракеты. Основы теории полета ЗУР

Содержание
- 3. Литература: 1. Слуцкий В.З., Фогельсон Б.И. Импульсная техника и основы радиолокации. Изд.3-е перераб. и дополн. –
- 4. Учебные вопросы: 1. Системы координат используемые в теории и практике наведения ЗУР 2. Внешние воздействия, действующие
- 5. 1 учебный вопрос: Системы координат используемые в теории и практике наведения ЗУР
- 6. Основные требования, предъявляемые к ЗУР: Иметь заданные тактико-технические характеристики: - боевую дальность; - диапазон боевых высот;
- 7. Тенденциями совершенствования ЗУР является улучшение следующих характеристик: Боевые дальность, скорость, высота – диапазон дальностей, скоростей, высот,
- 8. 1) прямоугольная; 2) сферическая (полярная); 3) параметрическая; 4) связанная; 5) скоростная. В теории и практике наведения
- 9. Прямоугольная система координат В этой системе начало координат – точка 0 – находится в точке стояния
- 10. Прямоугольная система координат Прямоугольная (земная) система координат используется при: решении задач взаимного ориентирования боевых средств ПВО
- 11. Сферическая система координат В этой системе начало координат – точка 0 – в точке стояния РЛС,
- 12. Сферическая (полярная) система координат используется для определения пространственного положения объекта с помощью РЛС обнаружения или сопровождения
- 13. Параметрическая система координат
- 14. Параметрическая система координат Начало координат – точка О – в точке стояния РЛС наведения или старта
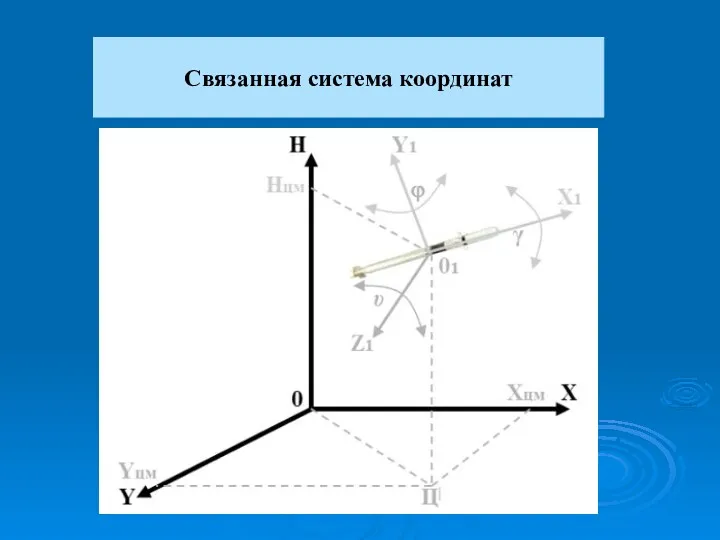
- 15. Связанная система координат
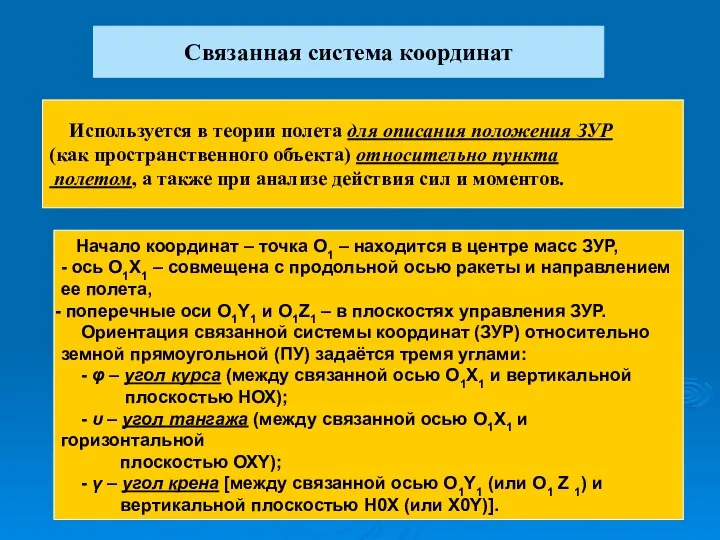
- 16. Связанная система координат Используется в теории полета для описания положения ЗУР (как пространственного объекта) относительно пункта
- 17. Связанная система координат Таким образом, положение ЗУР относительно ПУ полностью описывается: - тремя земными прямоугольными координатами
- 18. Скоростная система координат Используется в теории полета при анализе явлений обтекания ЗУР воздушным потоком.
- 19. В этой системе начало координат – точка ОV – находится в центре масс ЗУР, ось ОvХv
- 20. 2 учебный вопрос: Внешние воздействия, действующие на ЗУР в полете
- 21. В соответствии со вторым законом Ньютона полет ракеты определяется системой сил, действующих на нее: F=G+P+R; где
- 22. Сила тяжести G обусловлена притяжением ракеты к Земле и равна произведению массы ракеты (М) на ускорение
- 23. Сила тяги реактивного двигателя P обусловлена реакцией (противодействием) на истечение продуктов сгорания топлива из сопла двигателя
- 24. Сила тяги реактивного двигателя P Сила тяги направлена в сторону, противоположную истечению продуктов сгорания топлива, и
- 25. Полная аэродинамическая сила Полная аэродинамическая сила R является равнодействующей сил взаимодействия воздуха с поверхностью движущейся ракеты.
- 26. Для анализа действия на ракету системы всех сил R приводят к центру масс (ЦМ), компенсируя перенос
- 27. Полный аэродинамический момент Полный аэродинамический момент М раскладывают на составляющие по осям связанной системы координат: М
- 28. Полный аэродинамический момент Стабилизирующий момент Mстаб возникает при отклонении продольной оси ракеты от вектора скорости, т.
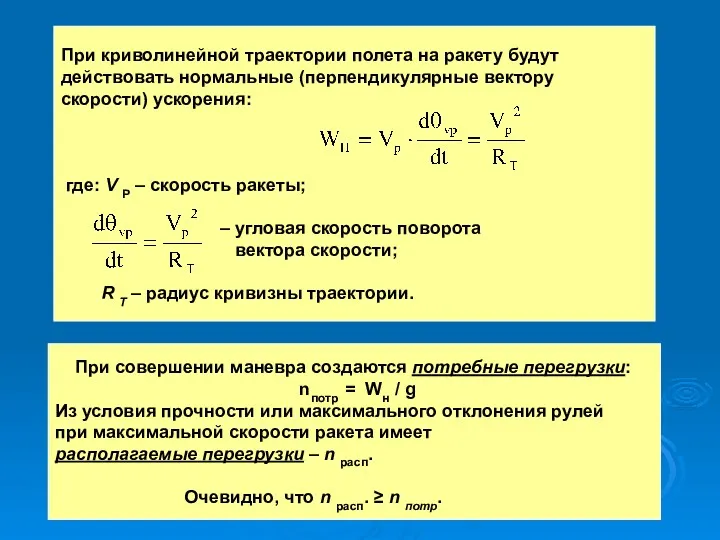
- 29. При криволинейной траектории полета на ракету будут действовать нормальные (перпендикулярные вектору скорости) ускорения: где: V P
- 30. Характеристики управления ракетой Маневренность ракеты - быстрота изменения направления полета. Устойчивость – способность ракеты восстанавливать равновесие
- 31. 3 учебный вопрос: Методы наведения, используемые при теленаведении и в системах с самонаведением
- 32. Методы наведения, используемые при теленаведении Реализованы следующие методы: Метод трех точек Метод спрямления траектории Методом наведения
- 33. Метод трех точек Физическая сущность: в любой момент времени наведения ракета должна находиться на прямой линии,
- 34. 2. Метод спрямления траектории Физическая сущность: при наведении линия «СНР–ракета» перемещается с некоторым умень- шающимся упреждением
- 35. Особенности построения систем с самонаведением Принцип действия систем с самонаведением: бортовая аппаратура управления полетом ракеты самостоятельно
- 36. Система самонаведения ЗУР и функциональные связи
- 37. Методы наведения, используемые в системах с самонаведением В системах с самонаведением метод наведения описывает взаимное положение
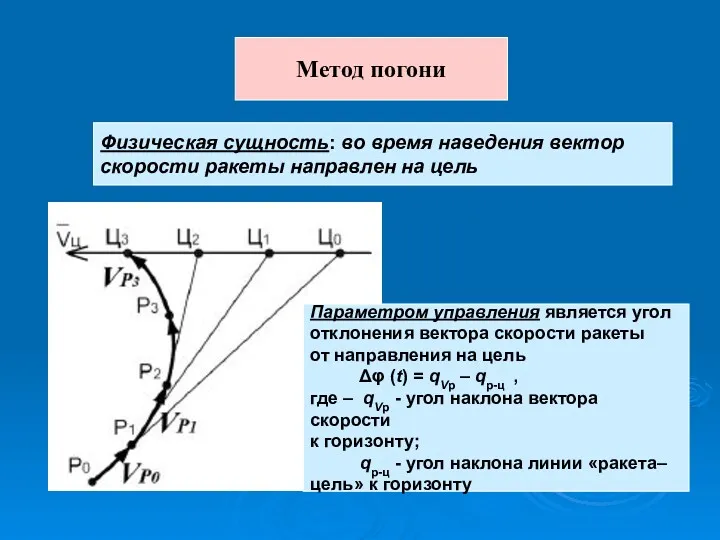
- 38. Метод погони Физическая сущность: во время наведения вектор скорости ракеты направлен на цель Параметром управления является
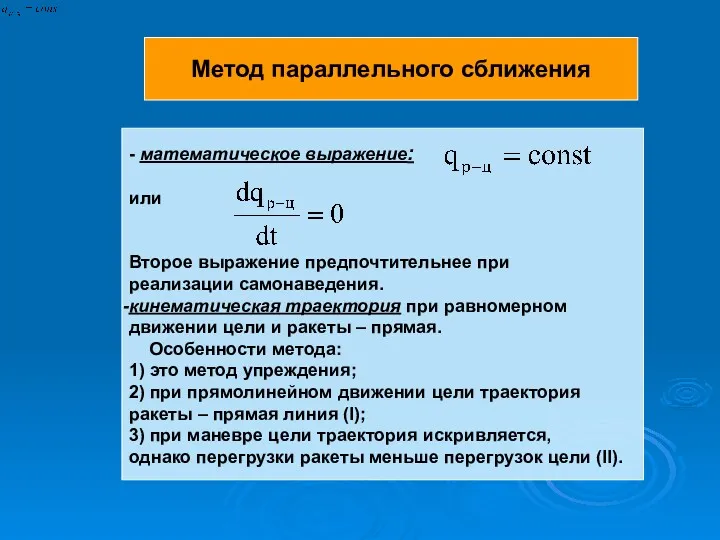
- 39. Метод параллельного сближения физическая сущность: во время наведения положение линии «ракета–цель» должно быть параллельным своему первоначальному
- 40. Метод параллельного сближения - математическое выражение: или Второе выражение предпочтительнее при реализации самонаведения. кинематическая траектория при
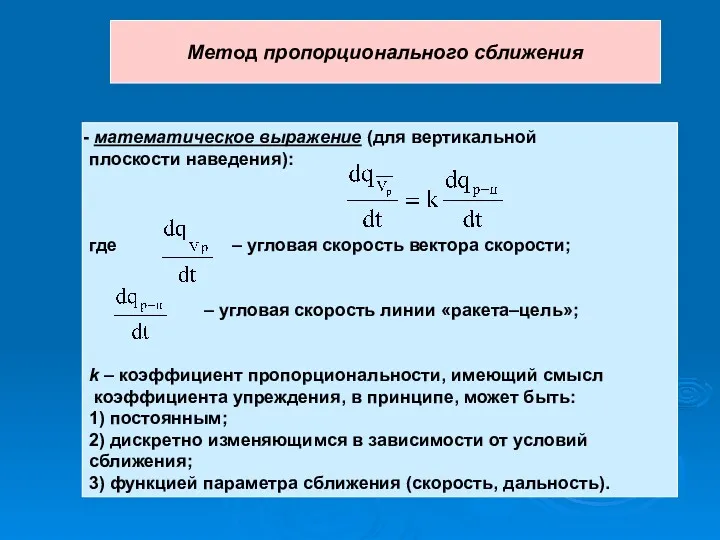
- 41. Метод пропорционального сближения физическая сущность: во время наведения угловая скорость вращения вектора скорости ракеты должна быть
- 42. Метод пропорционального сближения математическое выражение (для вертикальной плоскости наведения): где – угловая скорость вектора скорости; –
- 44. Скачать презентацию

Литература:
1. Слуцкий В.З., Фогельсон Б.И. Импульсная техника и основы радиолокации. Изд.3-е
Литература:
1. Слуцкий В.З., Фогельсон Б.И. Импульсная техника и основы радиолокации. Изд.3-е

Учебные вопросы:
1. Системы координат используемые в теории и практике наведения ЗУР
Учебные вопросы:
1. Системы координат используемые в теории и практике наведения ЗУР
1 учебный вопрос:
Системы координат используемые в теории
и практике наведения ЗУР
1 учебный вопрос:
Системы координат используемые в теории
и практике наведения ЗУР

Основные требования,
предъявляемые к ЗУР:
Иметь заданные тактико-технические характеристики:
- боевую дальность;
-
Основные требования,
предъявляемые к ЗУР:
Иметь заданные тактико-технические характеристики:
- боевую дальность;
-

Тенденциями совершенствования ЗУР
является улучшение следующих
характеристик:
Боевые дальность, скорость, высота
Тенденциями совершенствования ЗУР
является улучшение следующих
характеристик:
Боевые дальность, скорость, высота

1) прямоугольная;
2) сферическая (полярная);
3) параметрическая;
4) связанная;
5) скоростная.
В теории и практике наведения
1) прямоугольная;
2) сферическая (полярная);
3) параметрическая;
4) связанная;
5) скоростная.
В теории и практике наведения

Прямоугольная система координат
В этой системе начало координат – точка 0
Прямоугольная система координат
В этой системе начало координат – точка 0
Прямоугольная система координат
Прямоугольная (земная) система координат
используется при:
решении
Прямоугольная система координат
Прямоугольная (земная) система координат
используется при:
решении

Сферическая система координат
В этой системе начало координат – точка
Сферическая система координат
В этой системе начало координат – точка
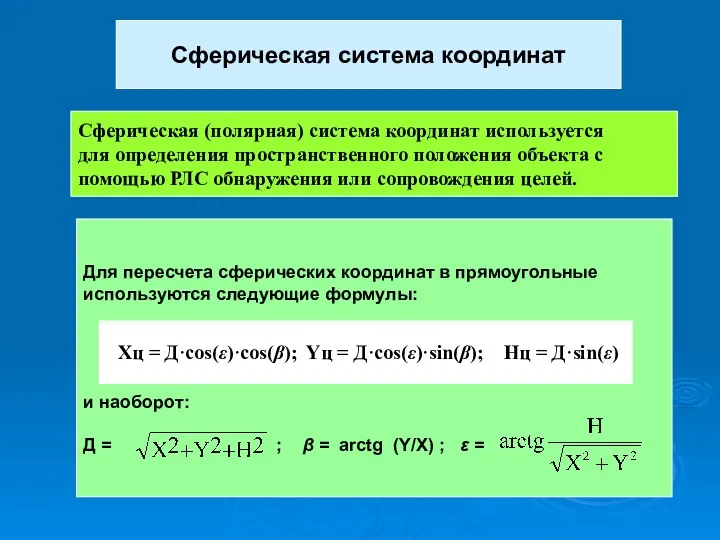
Сферическая (полярная) система координат используется
для определения пространственного положения объекта с
помощью
Сферическая (полярная) система координат используется
для определения пространственного положения объекта с
помощью

Параметрическая система координат
Параметрическая система координат
Параметрическая система координат
Начало координат – точка О – в
Параметрическая система координат
Начало координат – точка О – в
Связанная система координат
Связанная система координат
Связанная система координат
Используется в теории полета для описания положения
Связанная система координат
Используется в теории полета для описания положения
Связанная система координат
Таким образом, положение ЗУР относительно ПУ полностью
описывается:
Связанная система координат
Таким образом, положение ЗУР относительно ПУ полностью
описывается:

Скоростная система координат
Используется в теории полета при анализе явлений
Скоростная система координат
Используется в теории полета при анализе явлений
В этой системе начало координат – точка ОV – находится
в
В этой системе начало координат – точка ОV – находится
в
2 учебный вопрос:
Внешние воздействия, действующие
на ЗУР в полете
2 учебный вопрос:
Внешние воздействия, действующие
на ЗУР в полете
В соответствии со вторым законом Ньютона полет
ракеты определяется
В соответствии со вторым законом Ньютона полет
ракеты определяется
Сила тяжести G обусловлена притяжением ракеты к Земле и
равна
Сила тяжести G обусловлена притяжением ракеты к Земле и
равна

Сила тяги реактивного двигателя P обусловлена реакцией
(противодействием) на истечение
Сила тяги реактивного двигателя P обусловлена реакцией
(противодействием) на истечение
Сила тяги реактивного двигателя P
Сила тяги направлена в сторону, противоположную
Сила тяги реактивного двигателя P
Сила тяги направлена в сторону, противоположную

Полная аэродинамическая сила
Полная аэродинамическая сила R является равнодействующей
сил
Полная аэродинамическая сила
Полная аэродинамическая сила R является равнодействующей
сил
Для анализа действия на ракету системы всех сил R приводят
Для анализа действия на ракету системы всех сил R приводят

Полный аэродинамический момент
Полный аэродинамический момент М раскладывают на
составляющие по осям
Полный аэродинамический момент
Полный аэродинамический момент М раскладывают на
составляющие по осям
Полный аэродинамический момент
Стабилизирующий момент Mстаб возникает при отклонении
продольной оси ракеты
Полный аэродинамический момент
Стабилизирующий момент Mстаб возникает при отклонении
продольной оси ракеты
При криволинейной траектории полета на ракету будут
действовать нормальные (перпендикулярные вектору
При криволинейной траектории полета на ракету будут
действовать нормальные (перпендикулярные вектору

Характеристики управления ракетой
Маневренность ракеты - быстрота изменения
направления полета.
Характеристики управления ракетой
Маневренность ракеты - быстрота изменения
направления полета.
3 учебный вопрос:
Методы наведения, используемые
при теленаведении и в системах
с
3 учебный вопрос:
Методы наведения, используемые
при теленаведении и в системах
с
Методы наведения, используемые при теленаведении
Реализованы следующие методы:
Метод трех точек
Метод
Методы наведения, используемые при теленаведении
Реализованы следующие методы:
Метод трех точек
Метод

Метод трех точек
Физическая сущность:
в любой момент времени наведения
Метод трех точек
Физическая сущность:
в любой момент времени наведения

2. Метод спрямления траектории
Физическая сущность:
при наведении линия «СНР–ракета»
перемещается
2. Метод спрямления траектории
Физическая сущность:
при наведении линия «СНР–ракета»
перемещается

Особенности построения систем с самонаведением
Принцип действия систем с самонаведением:
бортовая аппаратура
Особенности построения систем с самонаведением
Принцип действия систем с самонаведением:
бортовая аппаратура

Система самонаведения ЗУР и
функциональные связи
Система самонаведения ЗУР и
функциональные связи
Методы наведения, используемые
в системах с самонаведением
В системах с
Методы наведения, используемые
в системах с самонаведением
В системах с
Метод погони
Физическая сущность: во время наведения вектор
скорости ракеты направлен
Метод погони
Физическая сущность: во время наведения вектор
скорости ракеты направлен

Метод параллельного сближения
физическая сущность: во время наведения положение
линии «ракета–цель»
Метод параллельного сближения
физическая сущность: во время наведения положение
линии «ракета–цель»
Метод параллельного сближения
- математическое выражение:
или
Второе выражение предпочтительнее при
Метод параллельного сближения
- математическое выражение:
или
Второе выражение предпочтительнее при

Метод пропорционального сближения
физическая сущность: во время наведения угловая скорость
вращения
Метод пропорционального сближения
физическая сущность: во время наведения угловая скорость
вращения
Метод пропорционального сближения
математическое выражение (для вертикальной
плоскости наведения):
где
Метод пропорционального сближения
математическое выражение (для вертикальной
плоскости наведения):
где
 Уставы Вооруженных Сил РФ
Уставы Вооруженных Сил РФ Устав внутренней службы вооруженных сил российской федерации
Устав внутренней службы вооруженных сил российской федерации 5
5 Види окопів, призначення та порядок їхнього устаткування
Види окопів, призначення та порядок їхнього устаткування Правові засади військового будівництва в Україні
Правові засади військового будівництва в Україні Обеспечение горючим мсбр в наступлении. (Тема 7.2)
Обеспечение горючим мсбр в наступлении. (Тема 7.2) Военная техника и оружие Красной Армии. Викторина
Военная техника и оружие Красной Армии. Викторина Армейская экспресс. Викторина
Армейская экспресс. Викторина Приведення стрілецької зброї до нормального бою
Приведення стрілецької зброї до нормального бою Состав и структура вооружённых сил Республики Беларусь
Состав и структура вооружённых сил Республики Беларусь Актуальні питання організації медичного забезпечення військ воєнного та мирного часу
Актуальні питання організації медичного забезпечення військ воєнного та мирного часу Виды и рода войск РФ
Виды и рода войск РФ Основные положения по организации и технологии войскового ремонта танка Т-72. Ремонт танков
Основные положения по организации и технологии войскового ремонта танка Т-72. Ремонт танков Формирование типоразмерных рядов военной автомобильной техники для обеспечения автомобильными базовыми шасси
Формирование типоразмерных рядов военной автомобильной техники для обеспечения автомобильными базовыми шасси История истребителей МИГ
История истребителей МИГ Размещение военнослужащих (занятие № 1)
Размещение военнослужащих (занятие № 1) Средства индивидуальной защиты органов дыхания фильтрующего типа. Общевойсковой фильтрующий противогаз
Средства индивидуальной защиты органов дыхания фильтрующего типа. Общевойсковой фильтрующий противогаз Обеспечение горючим мсбр в обороне. (Тема 7.1)
Обеспечение горючим мсбр в обороне. (Тема 7.1) Организация медицинского обеспечения мотострелковой (танковой, механизированной) бригады в наступлении
Организация медицинского обеспечения мотострелковой (танковой, механизированной) бригады в наступлении Сведения из внутренней и внешней баллистики. Сущность явления выстрела. Траектория полета пули. (Тема 3.1,2)
Сведения из внутренней и внешней баллистики. Сущность явления выстрела. Траектория полета пули. (Тема 3.1,2) Защита Отечества
Защита Отечества Структура ВС РФ. Рода и виды ВС РФ
Структура ВС РФ. Рода и виды ВС РФ Система управления огнем танка. Порядок работы со стабилизатором вооружения
Система управления огнем танка. Порядок работы со стабилизатором вооружения ТТХ основных образцов вооружения и боевой техники. Условные обозначения и опознавательные знаки подразделений и боевой техники
ТТХ основных образцов вооружения и боевой техники. Условные обозначения и опознавательные знаки подразделений и боевой техники Воинские звания
Воинские звания Солдат-наблюдатель. Действия наблюдателя. (Тема 6.2)
Солдат-наблюдатель. Действия наблюдателя. (Тема 6.2) АТО. Україна - це ми
АТО. Україна - це ми Химическое оружие
Химическое оружие