- Нейроморфное моделирование и биоробототехника

Содержание
- 2. План 1. Нейроморфное моделирование. Примеры биологически мотивированных нейросетевых моделей: a) зрительная система b) cлуховая система; c)
- 3. Нейроморфные системы и нейроморфное моделирование Под нейроморфными системами понимаются модели искусственных нейронных сетей, архитектура и дизайн
- 4. Нейроморфные системы Модели искусственных нейронных сетей из формальных нейронов предназначены для изучения особенностей параллельно работающих вычислительных
- 5. Осцилляторные нейросетевые модели Уже более четверти века уделяется внимание построению осцилляторных нейросетевых моделей обонятельной, зрительной и
- 6. Мотивации при построении осцилляторной модели зрительной коры Синхронизованные колебания нейронной активности, впервые экспериментально открытые в зрительной
- 7. Модель трехмерной осцилляторной нейросети (модель зрительной коры) Активный элемент сети – нейронный осциллятор; Пространственная архитектура 3D
- 8. Схема архитектуры 3D осцилляторной сети Изображение, подлежащее сегментации, задано в виде пиксельного разложения на согласованной с
- 9. Сетевой осциллятор Модель сетевого осциллятора была построена на основе биологически мотивированной модели нейронного осциллятора, образованного парой
- 10. Отклик сетевого осциллятора на изменение яркости пикселя
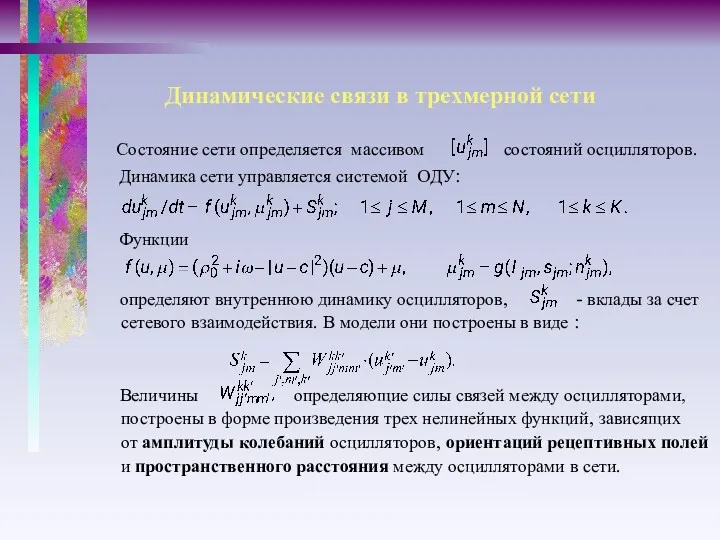
- 11. Динамические связи в трехмерной сети Состояние сети определяется массивом состояний осцилляторов. Динамика сети управляется системой ОДУ:
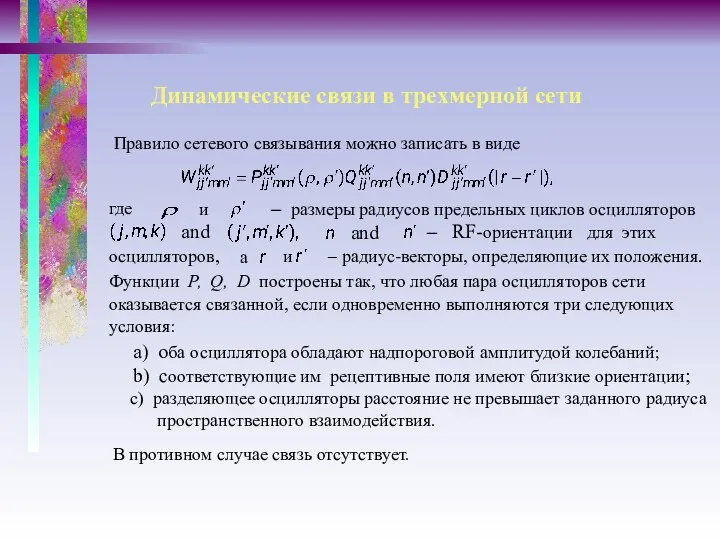
- 12. Динамические связи в трехмерной сети Правило сетевого связывания можно записать в виде где и – размеры
- 13. Двумерная осцилляторная сеть для сегментации изображений 2D сеть является предельной версией исходной 3D модели. Ее осцилляторы
- 14. Стадии работы двумерной осцилляторной сети
- 15. Версии сегментированного изображения после синхронизации
- 16. Сегментация текстур
- 17. К задаче зрительного поиска a) b) c) Выделение заданных фрагментов изображения: a) полное изображение; b) два
- 18. Достоинства динамической сегментации Нейросетевой динамический метод сегментации изображений обладает следующими достоинствами по сравнению с традиционными вычислительными:
- 19. Колебания в слуховой системе мозга • Поступающий в ухо акустический сигнал как правило представляет собой смесь
- 20. Подход к обработке смешанного акустического потока Биологически обоснованная модель осцилляторной сети, доставляющая метод выделения из смешенного
- 21. Осцилляторно-сетевая обработка смешанного потока Первый слой сети (segmentation layer) имеет возбуждающие связи, построенные на основе кросс-корреляционной
- 22. Коррелограммы потока и результаты обработки Коррелограммы смешанного потока (смесь речи и телефонного звонка): • в квадрате
- 23. Система двух связанных осцилляторных сетей для детектирования и распознавания запахов Особенность обонятельной системы: поступающих запах преобразуется
- 24. Система связанных сетей для детектирования запахов 2. Модель обонятельной коры Модель сети-коры структурно похожа на сеть-луковицу,
- 25. Биоробототехника (biorobotics) Биоробототехнику (biorobotics) можно рассматривать новую ветвь AI. Это высоко междисциплинарная область исследований, исходящая из
- 26. Активное техническое зрение Адаптивное управление автономными мобильными роботами как правило, предполагает включение активного зрения в их
- 27. Роботы, управляемые зрением Центр по зрительным исследованиям Университета г. Йорк, Торонто, Канада ( рук. Джон Тсотсос
- 28. Роботы, управляемые зрением Лаборатория роботов, Институт Нейроинформатики при EPFL, Zurich. (рук. Д.Флореано (Dario Floreano) ). Направление
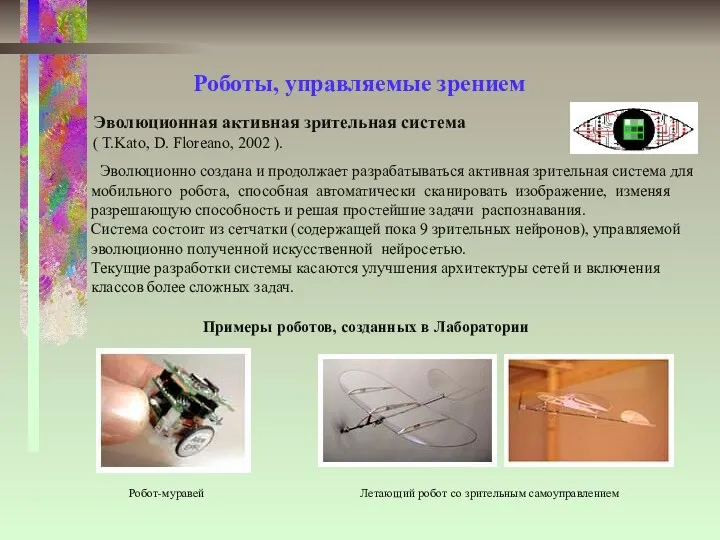
- 29. Роботы, управляемые зрением Эволюционная активная зрительная система ( T.Kato, D. Floreano, 2002 ). Эволюционно создана и
- 30. Роботы с комплексным нейроморфным дизайном Лаборатория искусственного интеллекта, Отделение информационных технологий, Универсистет г. Цюрих ( рук.
- 31. Примеры роботов, созданных в лаборатории искусственного интеллекта AILab Робот Morpho I с переключаемым зрительным вниманием Подвижный
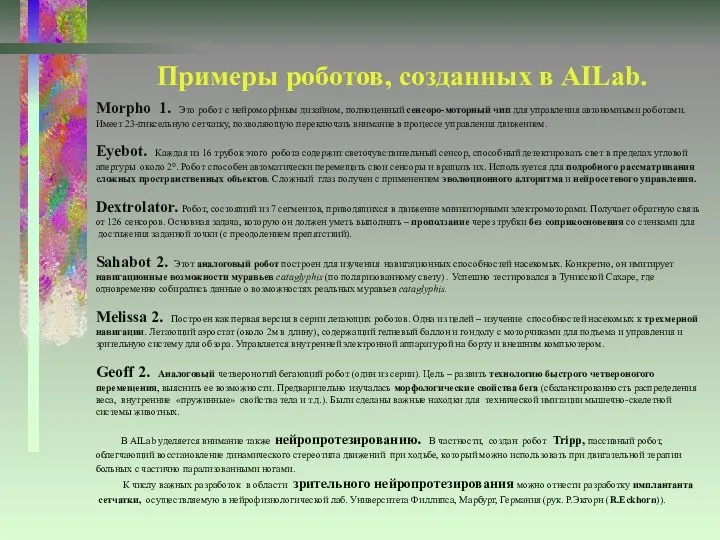
- 32. Примеры роботов, созданных в AILab. Morpho 1. Это робот с нейроморфным дизайном, полноценный сенсоро-моторный чип для
- 33. Роботы с активным зрением и самоорганизованным адаптивным управлением Ннститут нейрокибернетики им. А.Б.Когана РГУ (рук. лаб. А.И.Самарин).
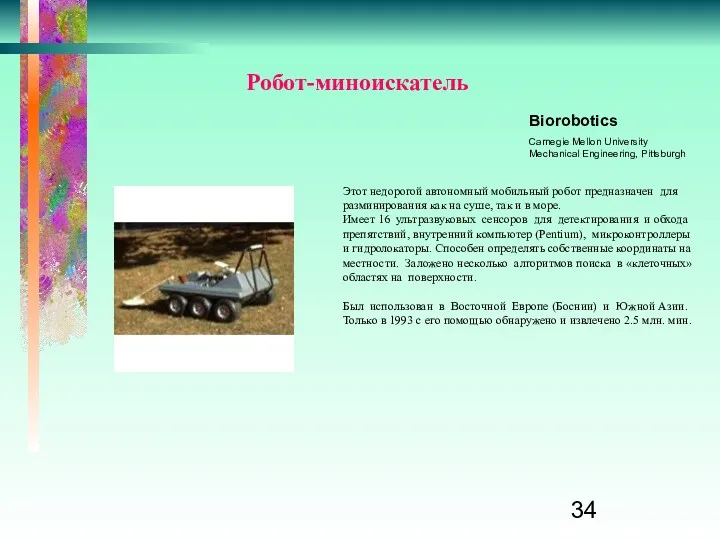
- 34. Робот-миноискатель Biorobotics Carnegie Mellon University Mechanical Engineering, Pittsburgh Этот недорогой автономный мобильный робот предназначен для разминирования
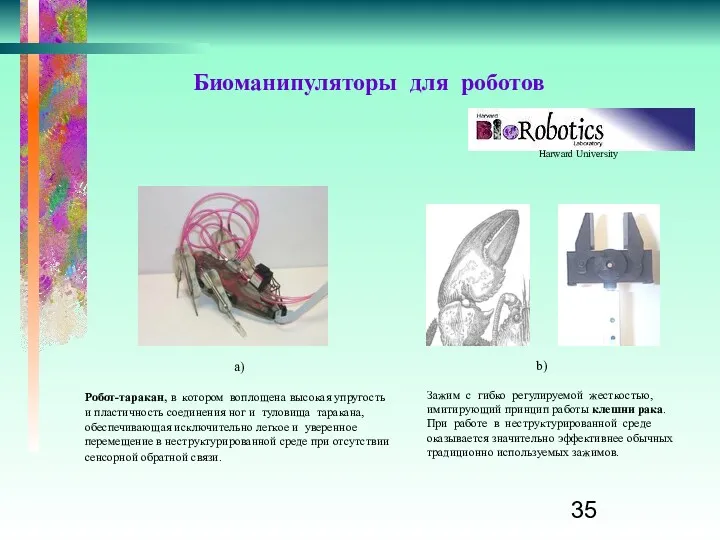
- 35. Биоманипуляторы для роботов a) b) Робот-таракан, в котором воплощена высокая упругость и пластичность соединения ног и
- 36. Моделирование внутренних органов • Калифорнийский университет в Сан-Франциско • Станфордский нац. вычислительный центтр • Станфордский центр
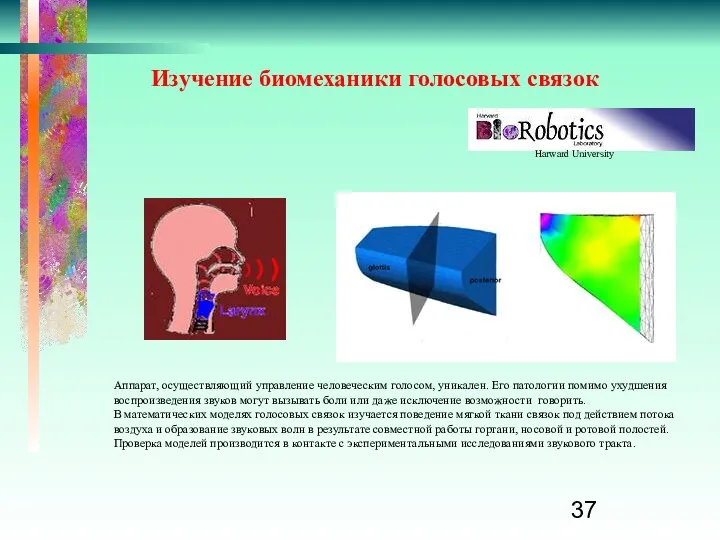
- 37. Изучение биомеханики голосовых связок Аппарат, осуществляющий управление человеческим голосом, уникален. Его патологии помимо ухудшения воспроизведения звуков
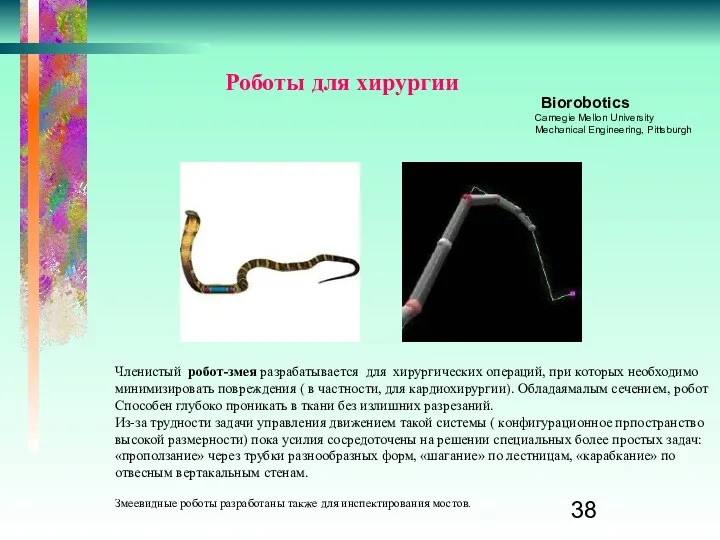
- 38. Роботы для хирургии Членистый робот-змея разрабатывается для хирургических операций, при которых необходимо минимизировать повреждения ( в
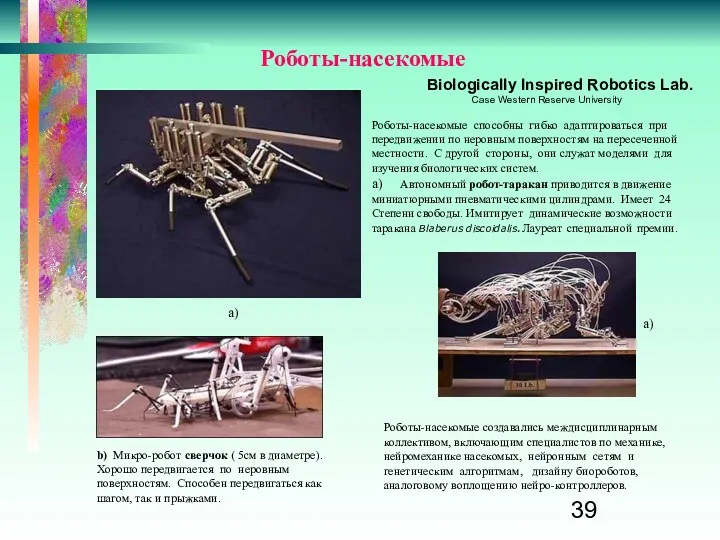
- 39. Роботы-насекомые Biologically Inspired Robotics Lab. Case Western Reserve University Роботы-насекомые способны гибко адаптироваться при передвижении по
- 40. Нейропротезирование В созданных нейропротезах использовано текущее понимание действия человеческих мускулов и их нейросетевые математические модели. Кроме
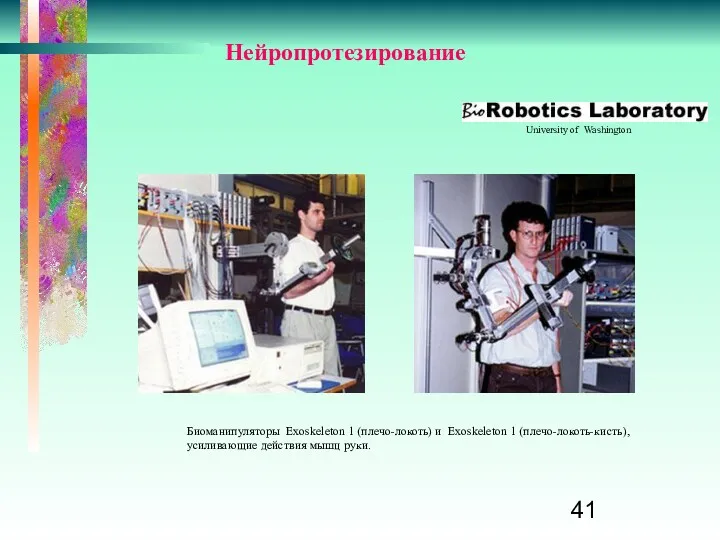
- 41. Нейропротезирование University of Washington Биоманипуляторы Exoskeleton 1 (плечо-локоть) и Exoskeleton 1 (плечо-локоть-кисть), усиливающие действия мышц руки.
- 42. Автономный робот-вертолет USC, Robotic Embedded Systems Laboratory
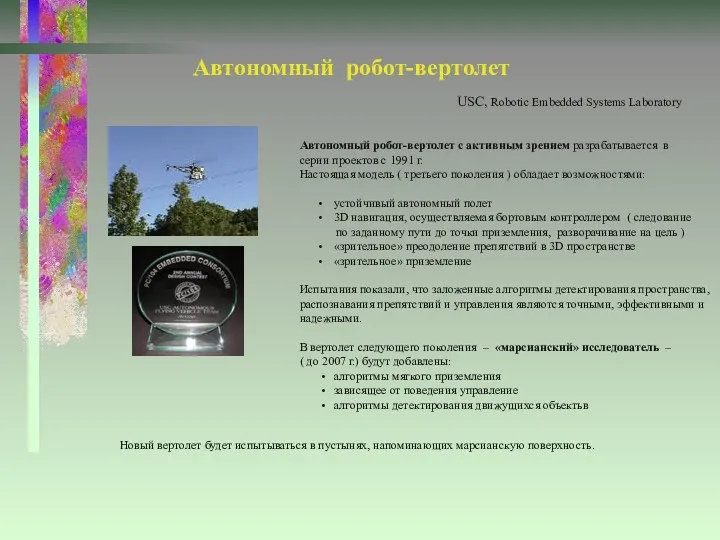
- 43. Автономный робот-вертолет USC, Robotic Embedded Systems Laboratory Автономный робот-вертолет с активным зрением разрабатывается в серии проектов
- 44. Типы рецептивных полей Отклик на стимул ганглиозных клеток сетчатки с различным типом рецептивного поля: on- центр
- 46. Скачать презентацию
План
1. Нейроморфное моделирование.
Примеры биологически мотивированных нейросетевых моделей:
a)
План
1. Нейроморфное моделирование.
Примеры биологически мотивированных нейросетевых моделей:
a)
Нейроморфные системы и нейроморфное моделирование
Под нейроморфными системами понимаются модели искусственных нейронных
Нейроморфные системы и нейроморфное моделирование
Под нейроморфными системами понимаются модели искусственных нейронных
Нейроморфные системы
Модели искусственных нейронных сетей из формальных нейронов предназначены
Нейроморфные системы
Модели искусственных нейронных сетей из формальных нейронов предназначены
Осцилляторные нейросетевые модели
Уже более четверти века уделяется внимание построению
Осцилляторные нейросетевые модели
Уже более четверти века уделяется внимание построению
Мотивации при построении осцилляторной модели зрительной коры
Синхронизованные колебания нейронной
Мотивации при построении осцилляторной модели зрительной коры
Синхронизованные колебания нейронной
Модель трехмерной осцилляторной нейросети (модель зрительной коры)
Активный элемент сети – нейронный
Модель трехмерной осцилляторной нейросети (модель зрительной коры)
Активный элемент сети – нейронный
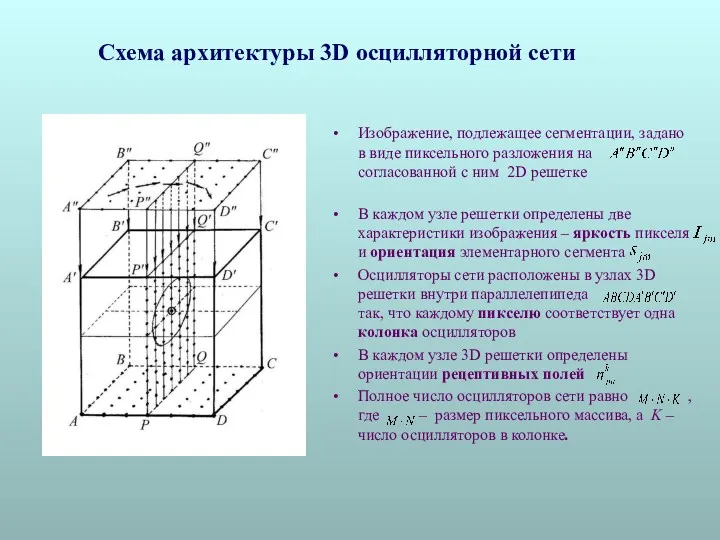
Схема архитектуры 3D осцилляторной сети
Изображение, подлежащее сегментации, задано в виде
Схема архитектуры 3D осцилляторной сети
Изображение, подлежащее сегментации, задано в виде
Сетевой осциллятор
Модель сетевого осциллятора была построена на основе биологически мотивированной
Сетевой осциллятор
Модель сетевого осциллятора была построена на основе биологически мотивированной
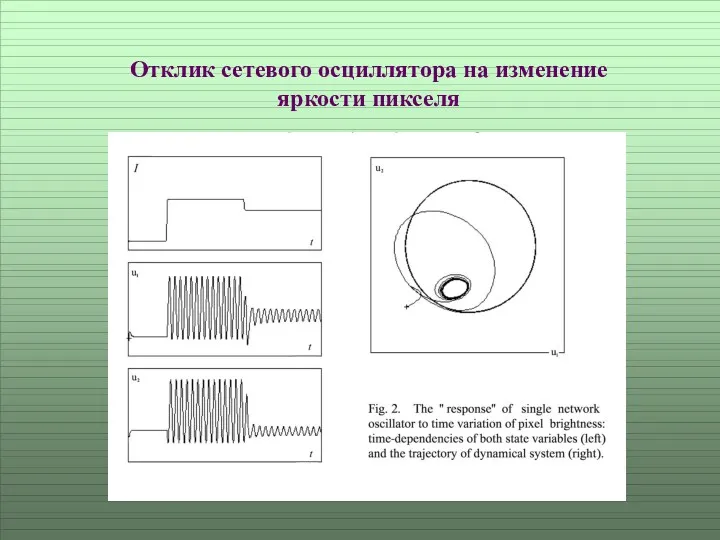
Отклик сетевого осциллятора на изменение яркости пикселя
Отклик сетевого осциллятора на изменение яркости пикселя
Динамические связи в трехмерной сети
Состояние сети определяется массивом
Динамические связи в трехмерной сети
Состояние сети определяется массивом
Динамические связи в трехмерной сети
Правило сетевого связывания можно записать
Динамические связи в трехмерной сети
Правило сетевого связывания можно записать
Двумерная осцилляторная сеть
для сегментации изображений
2D сеть является предельной версией
Двумерная осцилляторная сеть
для сегментации изображений
2D сеть является предельной версией

Стадии работы двумерной осцилляторной сети
Стадии работы двумерной осцилляторной сети
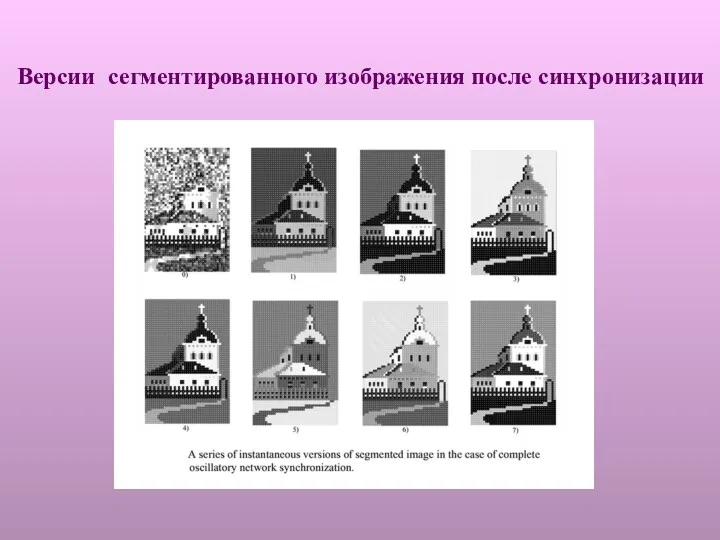
Версии сегментированного изображения после синхронизации
Версии сегментированного изображения после синхронизации
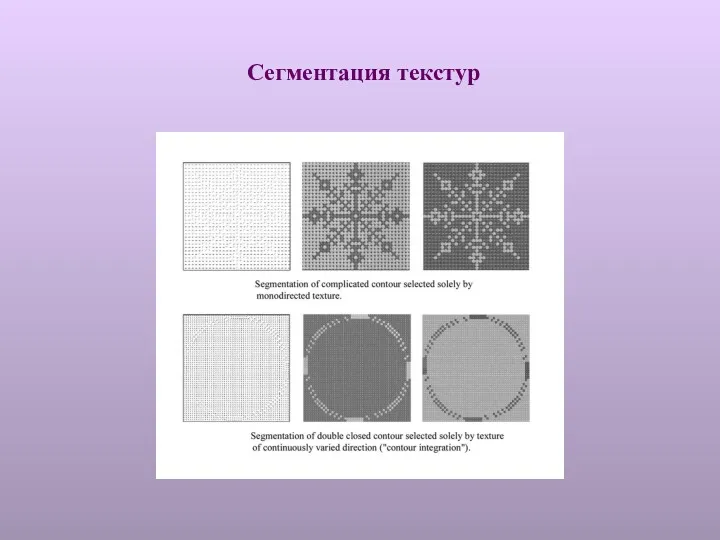
Сегментация текстур
Сегментация текстур
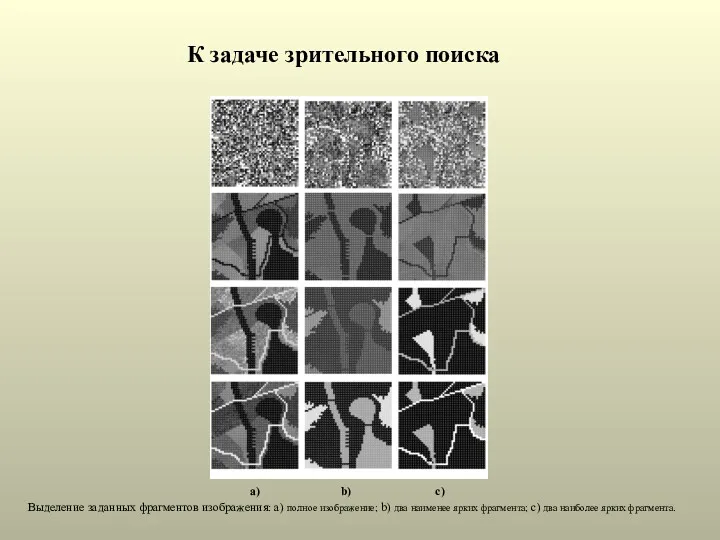
К задаче зрительного поиска
a) b) c)
Выделение
К задаче зрительного поиска
a) b) c)
Выделение
Достоинства динамической сегментации
Нейросетевой динамический метод сегментации изображений
обладает следующими достоинствами
Достоинства динамической сегментации
Нейросетевой динамический метод сегментации изображений
обладает следующими достоинствами
Колебания в слуховой системе мозга
• Поступающий в ухо акустический
Колебания в слуховой системе мозга
• Поступающий в ухо акустический
Подход к обработке смешанного акустического потока
Биологически обоснованная модель осцилляторной
Подход к обработке смешанного акустического потока
Биологически обоснованная модель осцилляторной
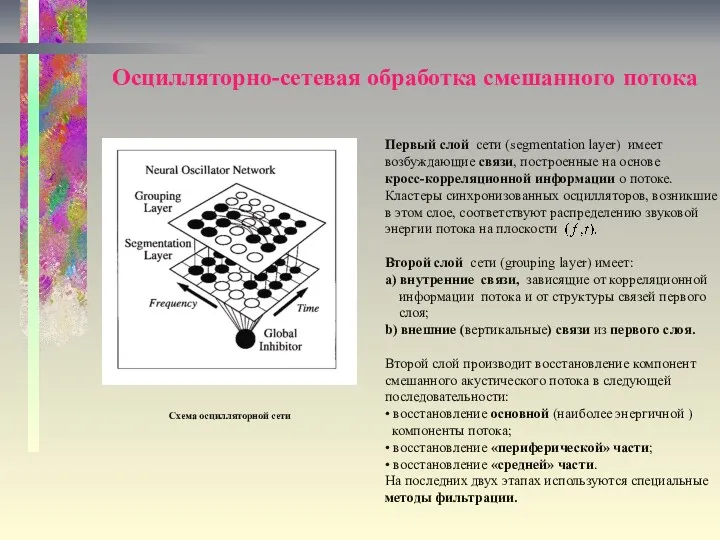
Осцилляторно-сетевая обработка смешанного потока
Первый слой сети (segmentation layer) имеет
Осцилляторно-сетевая обработка смешанного потока
Первый слой сети (segmentation layer) имеет
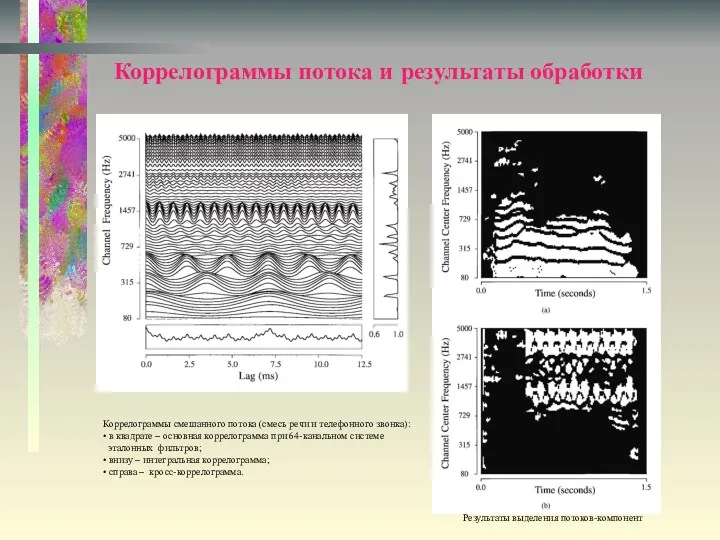
Коррелограммы потока и результаты обработки
Коррелограммы смешанного потока (смесь речи
Коррелограммы потока и результаты обработки
Коррелограммы смешанного потока (смесь речи
Система двух связанных осцилляторных сетей для детектирования и распознавания запахов
Система двух связанных осцилляторных сетей для детектирования и распознавания запахов
Система связанных сетей для детектирования запахов
Система связанных сетей для детектирования запахов
Биоробототехника (biorobotics)
Биоробототехнику (biorobotics) можно рассматривать новую ветвь AI.
Это высоко
Биоробототехника (biorobotics)
Биоробототехнику (biorobotics) можно рассматривать новую ветвь AI.
Это высоко
Активное техническое зрение
Адаптивное управление автономными мобильными роботами
Активное техническое зрение
Адаптивное управление автономными мобильными роботами
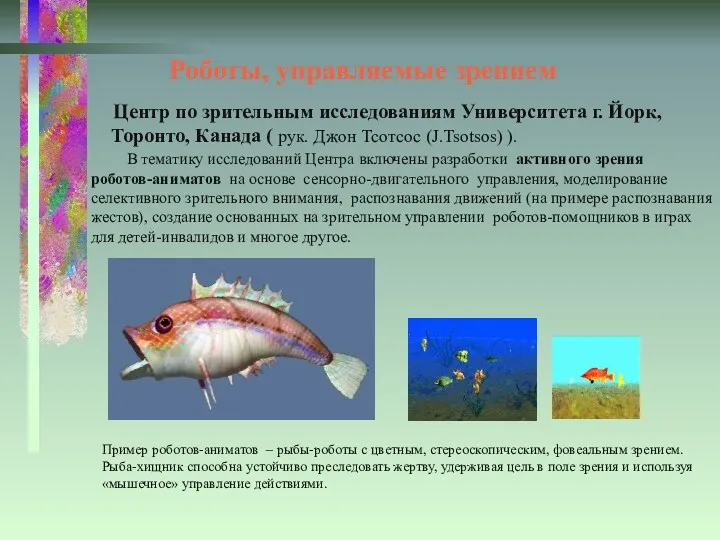
Роботы, управляемые зрением
Центр по зрительным исследованиям Университета г.
Роботы, управляемые зрением
Центр по зрительным исследованиям Университета г.
Роботы, управляемые зрением
Лаборатория роботов, Институт Нейроинформатики
при
Роботы, управляемые зрением
Лаборатория роботов, Институт Нейроинформатики
при
Роботы, управляемые зрением
Эволюционная активная зрительная система
(
Роботы, управляемые зрением
Эволюционная активная зрительная система
(
Роботы с комплексным нейроморфным дизайном
Лаборатория искусственного интеллекта, Отделение
Роботы с комплексным нейроморфным дизайном
Лаборатория искусственного интеллекта, Отделение

Примеры роботов, созданных в лаборатории искусственного интеллекта AILab
Примеры роботов, созданных в лаборатории искусственного интеллекта AILab
Примеры роботов, созданных в AILab.
Morpho 1. Это робот с нейроморфным
Примеры роботов, созданных в AILab.
Morpho 1. Это робот с нейроморфным

Роботы с активным зрением и самоорганизованным адаптивным управлением
Роботы с активным зрением и самоорганизованным адаптивным управлением
Робот-миноискатель
Biorobotics
Carnegie Mellon
Робот-миноискатель
Biorobotics
Carnegie Mellon
Биоманипуляторы для роботов
a)
Биоманипуляторы для роботов
a)

Моделирование внутренних органов
• Калифорнийский
Моделирование внутренних органов
• Калифорнийский
Изучение биомеханики голосовых связок
Изучение биомеханики голосовых связок
Роботы для хирургии
Членистый робот-змея
Роботы для хирургии
Членистый робот-змея
Роботы-насекомые
Biologically Inspired Robotics
Роботы-насекомые
Biologically Inspired Robotics

Нейропротезирование
В созданных нейропротезах использовано
Нейропротезирование
В созданных нейропротезах использовано
Нейропротезирование
University of Washington
Биоманипуляторы
Нейропротезирование
University of Washington
Биоманипуляторы

Автономный робот-вертолет
USC, Robotic
Автономный робот-вертолет
USC, Robotic
Автономный робот-вертолет
USC, Robotic
Автономный робот-вертолет
USC, Robotic
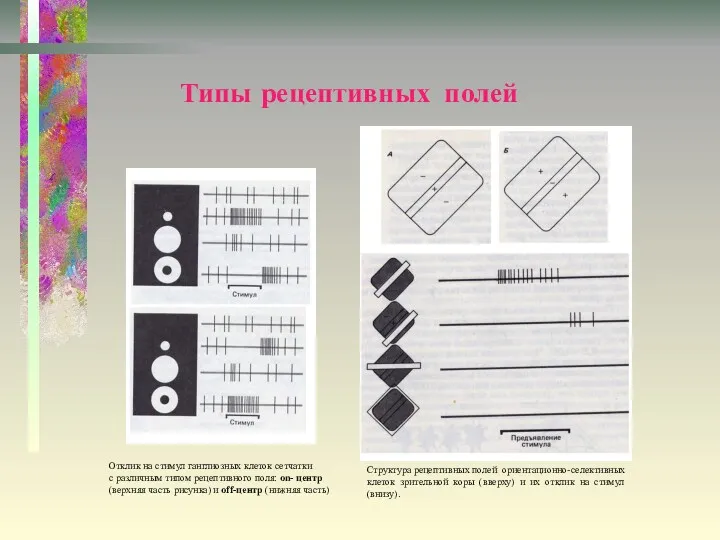
Типы рецептивных полей
Отклик на стимул ганглиозных клеток
Типы рецептивных полей
Отклик на стимул ганглиозных клеток
 Модификационная изменчивость
Модификационная изменчивость Методы исследования микроорганизмов и использование бактерий в биоиндикации
Методы исследования микроорганизмов и использование бактерий в биоиндикации Динамика содержания подвижного фосфора в серых лесных почвах Тюменской области
Динамика содержания подвижного фосфора в серых лесных почвах Тюменской области Митохондрия. Митохондрияның биологиялық рөлі
Митохондрия. Митохондрияның биологиялық рөлі Скелет. Строение, состав и соединение костей скелета человека
Скелет. Строение, состав и соединение костей скелета человека Вид. Популяция
Вид. Популяция Строение и функции кожи
Строение и функции кожи Ноосфера
Ноосфера Зелёная аптека. Экологическая игра
Зелёная аптека. Экологическая игра Анимированный кроссворд Строение клетки
Анимированный кроссворд Строение клетки Технологическое значение анатомических особенностей зерна
Технологическое значение анатомических особенностей зерна 20231016_prezentatsiya_2
20231016_prezentatsiya_2 Вирусы. Сходства вируса с живыми организмами. Размножение вирусов
Вирусы. Сходства вируса с живыми организмами. Размножение вирусов Биохимия печени. (Лекция 31)
Биохимия печени. (Лекция 31) Роль соли для организма человека
Роль соли для организма человека Моллюски
Моллюски Предмет и задачи микробиологии
Предмет и задачи микробиологии Неорганические вещества клетки (10 класс)
Неорганические вещества клетки (10 класс) Разнообразие животных. Урок 19
Разнообразие животных. Урок 19 Устный журнал: Зеленый наряд нашей планеты
Устный журнал: Зеленый наряд нашей планеты Уровни организации жизни
Уровни организации жизни Птицы из Красной книги Югры
Птицы из Красной книги Югры Өсімдіктер әлемі
Өсімдіктер әлемі Вопросы к викторине по охране природы
Вопросы к викторине по охране природы Личностно-ориентированная технология на уроках биологии
Личностно-ориентированная технология на уроках биологии Интегрированный урок биологии и химии с применением информационных технологий
Интегрированный урок биологии и химии с применением информационных технологий Забота о потомстве
Забота о потомстве Corynebacterium Erysipelothrix & Listeria
Corynebacterium Erysipelothrix & Listeria