- Поверхности. Способ задания поверхности

Содержание
- 2. Задание поверхности на чертеже 2. Определителем – совокупностью геометрических элементов, позволяющих реализовать закон образования поверхности 1.
- 3. Каркасный способ задания поверхности Каркас поверхности – упорядоченное множество точек или линий, принадлежащих поверхности. Если поверхность
- 4. Кинематический способ образования поверхностей Поверхность – непрерывная совокупность последовательных положений линии gj , перемещающейся в пространстве
- 5. Определитель поверхности Определитель поверхности – необходимая и достаточная совокупность независимых условий, однозначно задающих поверхность. Ф (Г);
- 6. Классификация поверхностей 1 класс 2 класс группа 1.А группа 1.Б подкласс 1 подкласс 2 подкласс 3
- 7. Поверхности линейчатые Поверхности линейчатые С тремя направляющими С одной направляющей С двумя направляющими Косой цилиндр с
- 8. Линейчатые поверхности с тремя направляющими Дважды косой цилиндроид Косой цилиндр с тремя направляющими Однополостной гиперболоид Дважды
- 9. Линейчатые поверхности с двумя направляющими и направляющей плоскостью Ф ( g, d1 , d2 , α
- 10. Линейчатые поверхности с двумя направляющими и плоскостью параллелизма (поверхности Каталана) g ║ α Ф ( g,
- 11. 2" 1' 2' 3' 4' 5' 6' 7' 8' 9' 10' 11' 12' 4" 6" 8"
- 12. Гиперболический параболоид (косая плоскость) Косая плоскость формируется при движении прямой по двум скрещивающимся прямолинейным направляющим, при
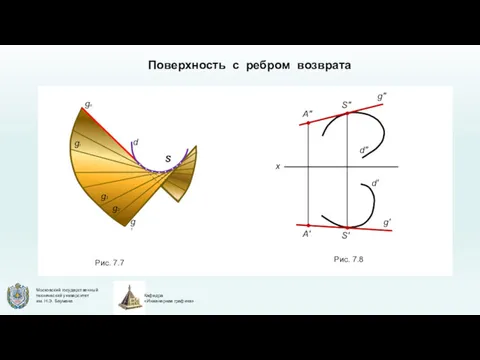
- 13. Линейчатые поверхности с одной направляющей (торсовые поверхности) Поверхность с ребром возврата (торс) образуется перемещением прямолинейной образующей
- 14. Si gi g1 g2 g3 gn d Поверхность с ребром возврата d' d" A" S" g"
- 15. Цилиндрическая поверхность g' g" A' B' g1' d' d" B" A" g1" d g Рис. 7.9
- 16. Коническая поверхность A" B" S" g" A' B' g' S g d d" x S' d'
- 17. Подклассы поверхностей Движение образующей g может быть задано: направляющими линиями d законом движения поступательным вращательным винтовым
- 18. Поверхности вращения - образуются при вращении образующей g (прямой или кривой) вокруг неподвижной оси вращения i
- 19. Вращение – перемещение точки по окружности в плоскости, перпендикулярной оси вращения. Пересечение плоскости вращения с осью
- 20. Поверхности вращения с прямолинейной образующей Коническая поверхность вращения g ∩ i Однополостный гиперболоид вращения g i
- 21. Цилиндрическая поверхность Ф ( i, ℓ, m ); [ ℓ ∩ m ≠ Ø; ℓ ║i
- 22. Ф ( i, ℓ, m, S ); [ ℓ ∩ m ≠ Ø; ℓ ∩ i
- 23. Поверхности вращения с образующей окружностью При вращении окружности вокруг ее диаметра образуется сфера Тор – поверхность,
- 24. Торовые поверхности r r > R r = R Открытый тор Закрытый тор Самопересекающийся тор Рис.
- 25. Главный меридиан Экватор Профильный меридиан e' m' p' B' E' yB yB p" e" B" E"
- 26. Построение проекций точек, принадлежащих торовой поверхности A" (B") 1" 2" c1" c2" A' B' 1' 2'
- 27. i' Поверхности вращения с образующей кривой второго порядка эллипс A" g" i" A' g' x i
- 28. Поверхности вращения с образующей кривой второго порядка парабола A' g' i' i" g" A" x i"
- 29. Поверхности вращения с образующей кривой второго порядка гипербола i' A' g' g" A" i" i i
- 30. Винтовые поверхности Винтовая поверхность формируется при винтовом движении образующей (прямой или кривой) вокруг оси. Винтовое движение
- 32. Скачать презентацию

Задание поверхности на чертеже
2. Определителем – совокупностью геометрических элементов, позволяющих реализовать
Задание поверхности на чертеже
2. Определителем – совокупностью геометрических элементов, позволяющих реализовать

Каркасный способ задания поверхности
Каркас поверхности – упорядоченное множество точек или линий,
Каркасный способ задания поверхности
Каркас поверхности – упорядоченное множество точек или линий,
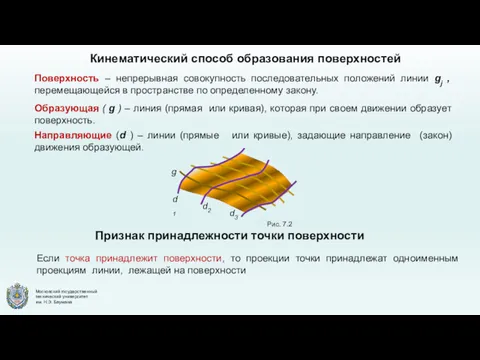
Кинематический способ образования поверхностей
Поверхность – непрерывная совокупность последовательных положений линии gj
Кинематический способ образования поверхностей
Поверхность – непрерывная совокупность последовательных положений линии gj
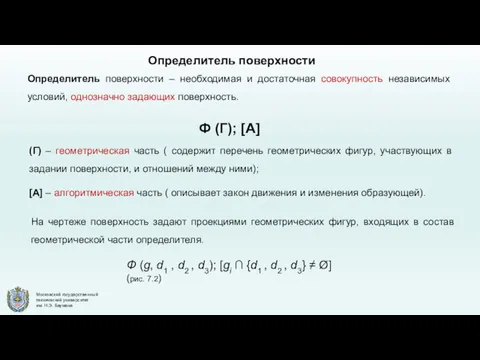
Определитель поверхности
Определитель поверхности – необходимая и достаточная совокупность независимых условий, однозначно
Определитель поверхности
Определитель поверхности – необходимая и достаточная совокупность независимых условий, однозначно
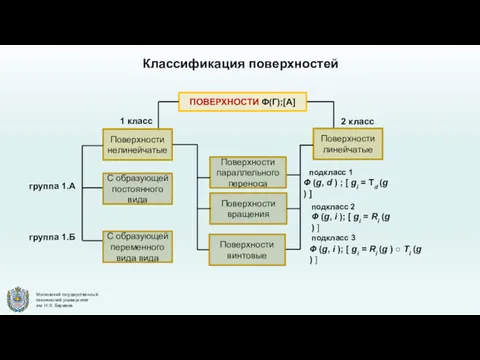
Классификация поверхностей
1 класс
2 класс
группа 1.А
группа 1.Б
подкласс 1
подкласс 2
подкласс 3
Ф (g, d
Классификация поверхностей
1 класс
2 класс
группа 1.А
группа 1.Б
подкласс 1
подкласс 2
подкласс 3
Ф (g, d

Поверхности линейчатые
Поверхности линейчатые
С тремя направляющими
С одной направляющей
С двумя направляющими
Косой цилиндр с
Поверхности линейчатые
Поверхности линейчатые
С тремя направляющими
С одной направляющей
С двумя направляющими
Косой цилиндр с

Линейчатые поверхности с тремя направляющими
Дважды косой
цилиндроид
Косой цилиндр с тремя направляющими
Однополостной
Линейчатые поверхности с тремя направляющими
Дважды косой
цилиндроид
Косой цилиндр с тремя направляющими
Однополостной
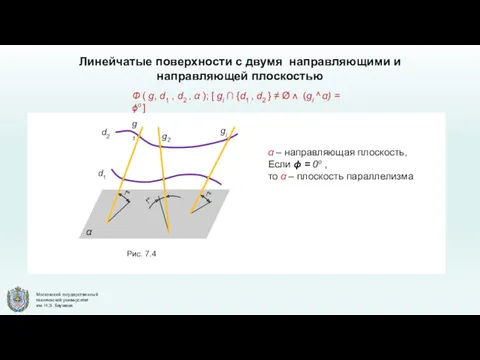
Линейчатые поверхности с двумя направляющими и направляющей плоскостью
Ф ( g, d1
Линейчатые поверхности с двумя направляющими и направляющей плоскостью
Ф ( g, d1
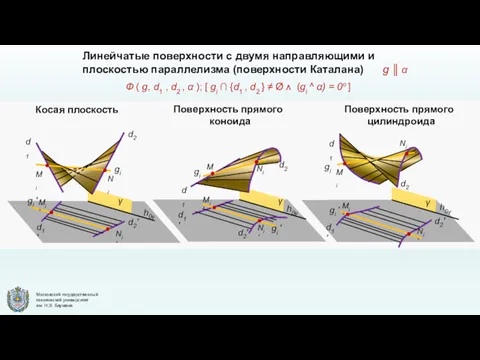
Линейчатые поверхности с двумя направляющими и плоскостью параллелизма (поверхности Каталана) g
Линейчатые поверхности с двумя направляющими и плоскостью параллелизма (поверхности Каталана) g
2"
1'
2'
3'
4'
5'
6'
7'
8'
9'
10'
11'
12'
4"
6"
8"
1"
3"
5"
7"
9"
10"
11"
12"
B"
A"
B'
A'
gi'
gi"
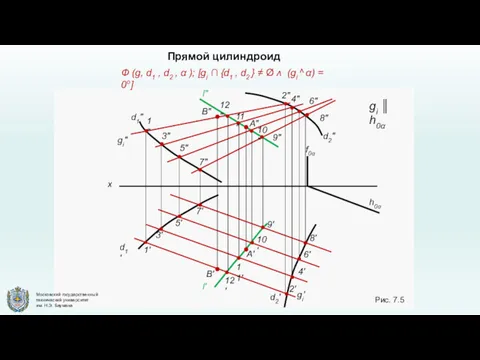
Прямой цилиндроид
d1'
d2'
h0α
f0α
x
d1"
d2"
Ф (g, d1 , d2 , α ); [gi ∩
2"
1'
2'
3'
4'
5'
6'
7'
8'
9'
10'
11'
12'
4"
6"
8"
1"
3"
5"
7"
9"
10"
11"
12"
B"
A"
B'
A'
gi'
gi"
Прямой цилиндроид
d1'
d2'
h0α
f0α
x
d1"
d2"
Ф (g, d1 , d2 , α ); [gi ∩
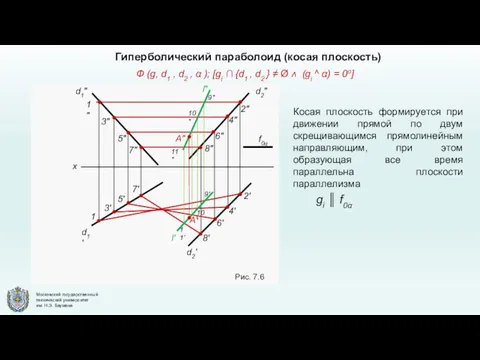
Гиперболический параболоид (косая плоскость)
Косая плоскость формируется при движении прямой по двум
Гиперболический параболоид (косая плоскость)
Косая плоскость формируется при движении прямой по двум
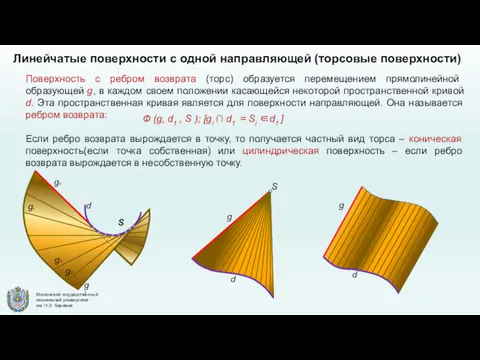
Линейчатые поверхности с одной направляющей (торсовые поверхности)
Поверхность с ребром возврата (торс)
Линейчатые поверхности с одной направляющей (торсовые поверхности)
Поверхность с ребром возврата (торс)
Si
gi
g1
g2
g3
gn
d
Поверхность с ребром возврата
d'
d"
A"
S"
g"
g'
S'
A'
Рис. 7.7
Рис. 7.8
x
Si
gi
g1
g2
g3
gn
d
Поверхность с ребром возврата
d'
d"
A"
S"
g"
g'
S'
A'
Рис. 7.7
Рис. 7.8
x
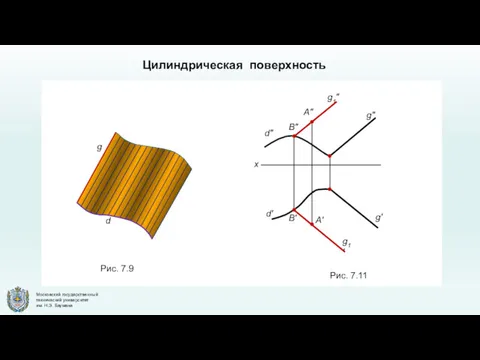
Цилиндрическая поверхность
g'
g"
A'
B'
g1'
d'
d"
B"
A"
g1"
d
g
Рис. 7.9
Рис. 7.11
x
Московский государственный
технический университет
им. Н.Э. Баумана
Цилиндрическая поверхность
g'
g"
A'
B'
g1'
d'
d"
B"
A"
g1"
d
g
Рис. 7.9
Рис. 7.11
x
Московский государственный
технический университет
им. Н.Э. Баумана

Коническая поверхность
A"
B"
S"
g"
A'
B'
g'
S
g
d
d"
x
S'
d'
Рис. 7.10
Рис. 7.12
Московский государственный
технический университет
им. Н.Э. Баумана
Коническая поверхность
A"
B"
S"
g"
A'
B'
g'
S
g
d
d"
x
S'
d'
Рис. 7.10
Рис. 7.12
Московский государственный
технический университет
им. Н.Э. Баумана

Подклассы поверхностей
Движение образующей g может быть задано:
направляющими линиями d законом
Подклассы поверхностей
Движение образующей g может быть задано:
направляющими линиями d законом
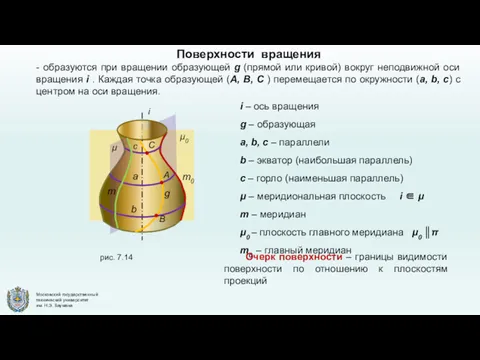
Поверхности вращения
- образуются при вращении образующей g (прямой или кривой) вокруг
Поверхности вращения
- образуются при вращении образующей g (прямой или кривой) вокруг
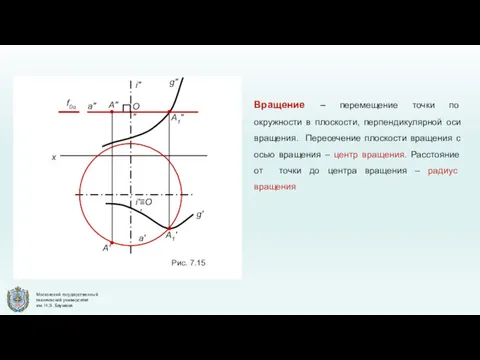
Вращение – перемещение точки по окружности в плоскости, перпендикулярной оси вращения.
Вращение – перемещение точки по окружности в плоскости, перпендикулярной оси вращения.
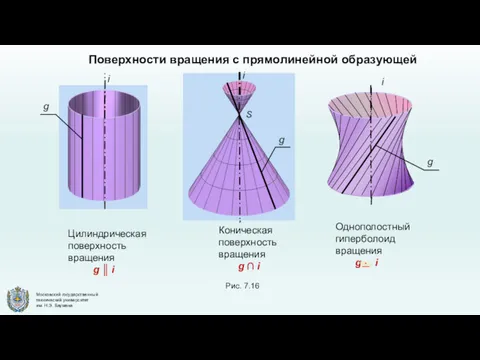
Поверхности вращения с прямолинейной образующей
Коническая поверхность
вращения
g ∩ i
Однополостный
Поверхности вращения с прямолинейной образующей
Коническая поверхность
вращения
g ∩ i
Однополостный
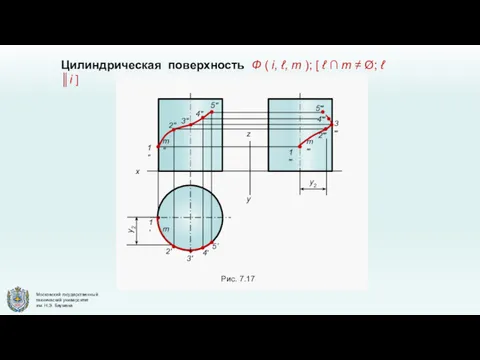
Цилиндрическая поверхность Ф ( i, ℓ, m ); [ ℓ ∩
Цилиндрическая поверхность Ф ( i, ℓ, m ); [ ℓ ∩
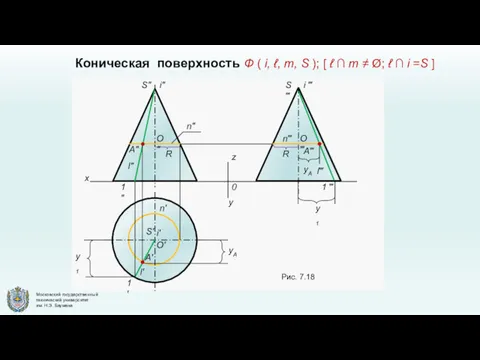
Ф ( i, ℓ, m, S ); [ ℓ ∩ m
Ф ( i, ℓ, m, S ); [ ℓ ∩ m
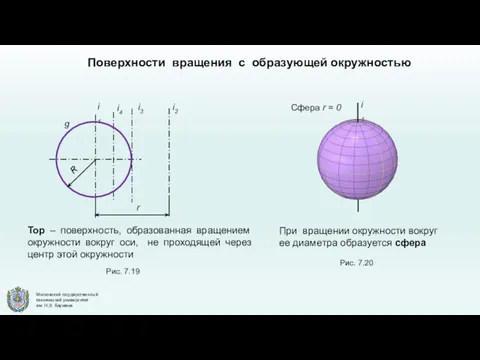
Поверхности вращения с образующей окружностью
При вращении окружности вокруг ее диаметра образуется
Поверхности вращения с образующей окружностью
При вращении окружности вокруг ее диаметра образуется

Торовые поверхности
r < R
r > R
r = R
Открытый тор
Закрытый
Торовые поверхности
r < R
r > R
r = R
Открытый тор
Закрытый
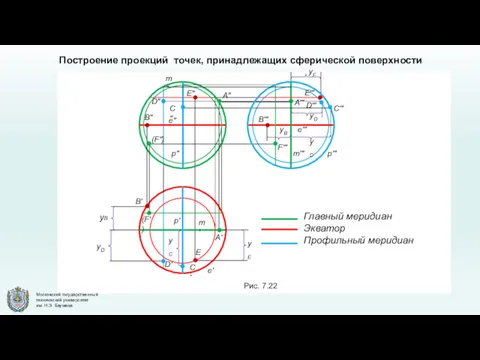
Главный меридиан
Экватор
Профильный меридиан
e'
m'
p'
B'
E'
yB
yB
p"
e"
B"
E"
C"
A"
A'
D'
C'
yD
yC
yC
yE
yE
D"
A'"
C'"
F'"
(F")
E'"
B'"
(F')
D'"
Построение проекций точек, принадлежащих сферической поверхности
p'"
m'"
e'"
yD
m"
Рис. 7.22
Московский государственный
технический
Главный меридиан
Экватор
Профильный меридиан
e'
m'
p'
B'
E'
yB
yB
p"
e"
B"
E"
C"
A"
A'
D'
C'
yD
yC
yC
yE
yE
D"
A'"
C'"
F'"
(F")
E'"
B'"
(F')
D'"
Построение проекций точек, принадлежащих сферической поверхности
p'"
m'"
e'"
yD
m"
Рис. 7.22
Московский государственный
технический

Построение проекций точек, принадлежащих торовой поверхности
A"
(B")
1"
2"
c1"
c2"
A'
B'
1'
2'
c1'
c2'
x
Рис. 7.23
Московский государственный
технический университет
им.
Построение проекций точек, принадлежащих торовой поверхности
A"
(B")
1"
2"
c1"
c2"
A'
B'
1'
2'
c1'
c2'
x
Рис. 7.23
Московский государственный
технический университет
им.

i'
Поверхности вращения с образующей кривой второго порядка
эллипс
A"
g"
i"
A'
g'
x
i
i
Эллипсоиды вращения:
вытянутый
сжатый
Рис. 7.24
Московский государственный
технический
i'
Поверхности вращения с образующей кривой второго порядка
эллипс
A"
g"
i"
A'
g'
x
i
i
Эллипсоиды вращения:
вытянутый
сжатый
Рис. 7.24
Московский государственный
технический
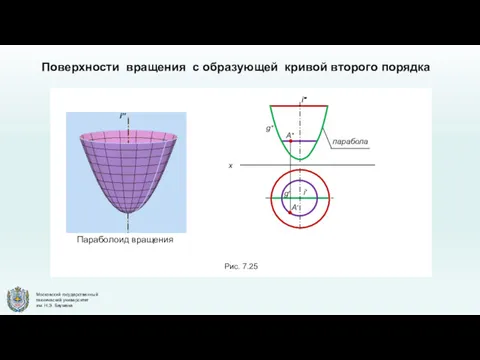
Поверхности вращения с образующей кривой второго порядка
парабола
A'
g'
i'
i"
g"
A"
x
i"
i"
Параболоид вращения
Рис. 7.25
Московский государственный
технический
Поверхности вращения с образующей кривой второго порядка
парабола
A'
g'
i'
i"
g"
A"
x
i"
i"
Параболоид вращения
Рис. 7.25
Московский государственный
технический
Поверхности вращения с образующей кривой второго порядка
гипербола
i'
A'
g'
g"
A"
i"
i
i
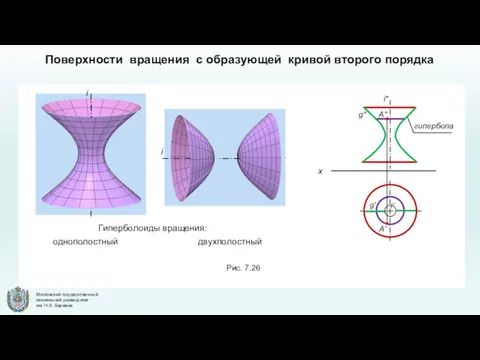
Гиперболоиды вращения:
однополостный
двухполостный
x
Рис. 7.26
Московский государственный
технический
Поверхности вращения с образующей кривой второго порядка
гипербола
i'
A'
g'
g"
A"
i"
i
i
Гиперболоиды вращения:
однополостный
двухполостный
x
Рис. 7.26
Московский государственный
технический

Винтовые поверхности
Винтовая поверхность формируется при винтовом движении образующей (прямой или
Винтовые поверхности
Винтовая поверхность формируется при винтовом движении образующей (прямой или
 Построение перспективы архитектурных деталей по одной точке схода (2 способ архитекторов)
Построение перспективы архитектурных деталей по одной точке схода (2 способ архитекторов) Создание крышки редуктора
Создание крышки редуктора Виды аксонометрии
Виды аксонометрии Дисциплина начертательная геометрия
Дисциплина начертательная геометрия Деление окружности на 3, 4, 6 и 8 равных частей
Деление окружности на 3, 4, 6 и 8 равных частей Болтовое соединение
Болтовое соединение Проекционное черчение. Методы проецирования
Проекционное черчение. Методы проецирования Правила выполнения рабочей документации автоматизации технологических процессов
Правила выполнения рабочей документации автоматизации технологических процессов Особые случаи разрезов
Особые случаи разрезов Основные сведения по оформлению чертежей
Основные сведения по оформлению чертежей Аксонометрические проекции. Урок 1
Аксонометрические проекции. Урок 1 Индивидуальные задания по технологии. Тема: Проецирование
Индивидуальные задания по технологии. Тема: Проецирование Портфолио. Архитектурная графика. Изображение архитектурного замысла при проектировании
Портфолио. Архитектурная графика. Изображение архитектурного замысла при проектировании Технический рисунок
Технический рисунок Дисциплина:Современное проектирование зданий и сооружений. Основные параметры
Дисциплина:Современное проектирование зданий и сооружений. Основные параметры Архитектурно-строительное черчение
Архитектурно-строительное черчение Операционализация исследования
Операционализация исследования Порядок чтения чертежей деталей
Порядок чтения чертежей деталей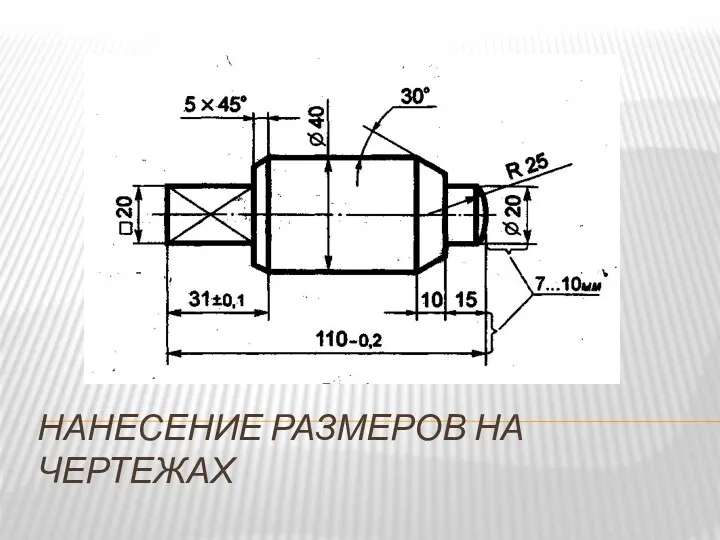 Нанесение размеров на чертежах
Нанесение размеров на чертежах Условности и упрощения на чертежах
Условности и упрощения на чертежах Сечения. Правила выполнения
Сечения. Правила выполнения Обозначение шероховатости поверхностей на чертежах
Обозначение шероховатости поверхностей на чертежах Архитектура. Построение плана здания
Архитектура. Построение плана здания Построение перспективы объекта методом архитекторов с недоступной точкой схода
Построение перспективы объекта методом архитекторов с недоступной точкой схода Сечения
Сечения Плоскость. Следы плоскости. Частное положение плоскости. Главные линии плоскости. Взаимное положение двух плоскостей
Плоскость. Следы плоскости. Частное положение плоскости. Главные линии плоскости. Взаимное положение двух плоскостей Аксонометрические проекции окружностей. 8 класс
Аксонометрические проекции окружностей. 8 класс Пересечение поверхностей вращения плоскостями
Пересечение поверхностей вращения плоскостями