- §8. Плоскопараллельное движение твердого тела (плоское)

Содержание
- 2. Общий случай плоскопараллельного движения О
- 4. Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг
- 5. Геометрическая интерпретация теоремы А В ω VBA VB
- 6. 8.5. Мгновенный центр скоростей Мгновенным центром скоростей (МЦС) называется точка связанная с телом, скорость которой в
- 7. P A B VB VA Точка P – МЦС; МЦС находится на пересечении перпендикуляров, восстановленных к
- 8. Скорости двух точек тела параллельны друг другу, не равны между собой и перпендикулярны прямой соединяющей эти
- 9. Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки. А В Р в бесконечности
- 10. Тело катится без скольжения по неподвижной поверхности. A VA ω
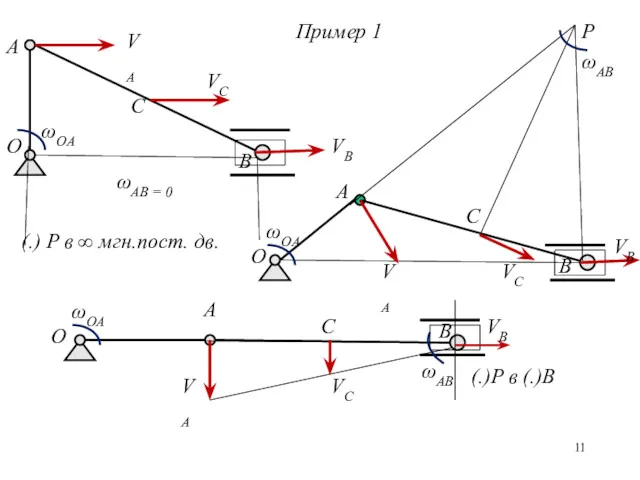
- 11. O O O A A A B B B VA VA VA C C C VB
- 12. Теорема о сложении ускорений точек при плоскопараллельном движении тела Ускорение произвольной точки тела при его плоскопараллельном
- 13. Геометрическая интерпретация Теоремы о сложении ускорений
- 14. Аналитическое определение ускорений 1. Направление движения (.) В известно. α ω X Проецируем на ось X:
- 15. 2. Направление аВ не известно. α ωAB X А В α Y ωOB Проецируем на ось
- 16. 3. Движение диска без скольжения. Дано: R = 0,5M Найти: aB ω = 2c-1 ; aA
- 17. Кинематический анализ плоского механизма. Найти для заданного положения механизма скорости и ускорения точек А, В, С,
- 18. Кинематический анализ плоского механизма. Построение плана скоростей механизма. Рк А В С 1. Определение скоростей: O
- 19. Свойства плана скоростей Одноименные отрезки плана скоростей и механизма взаимно перпендикулярны. 2. Одноименные отрезки плана скоростей
- 20. Аналитическое определение ускорений (для точки А и В): А В С
- 21. Определение ускорений (для точки С): А С
- 23. Скачать презентацию
Общий случай плоскопараллельного движения
О
Общий случай плоскопараллельного движения
О
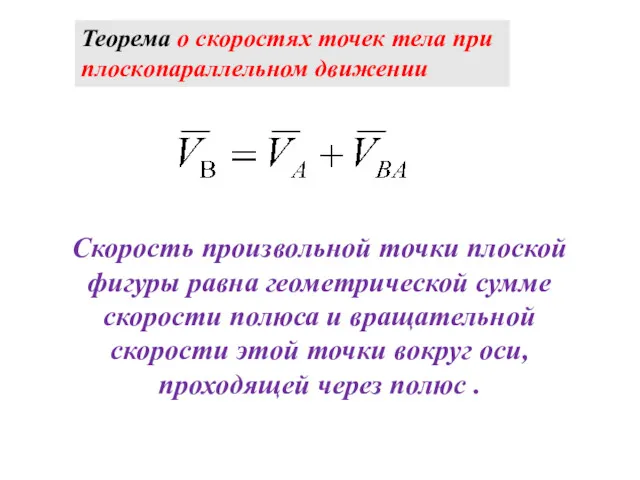
Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и
Скорость произвольной точки плоской фигуры равна геометрической сумме скорости полюса и
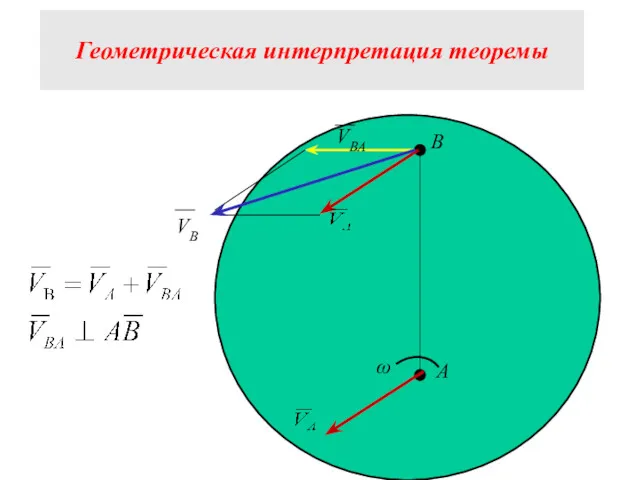
Геометрическая интерпретация теоремы
А
В
ω
VBA
VB
Геометрическая интерпретация теоремы
А
В
ω
VBA
VB
8.5. Мгновенный центр скоростей
Мгновенным центром скоростей (МЦС) называется точка связанная с
8.5. Мгновенный центр скоростей
Мгновенным центром скоростей (МЦС) называется точка связанная с
P
A
B
VB
VA
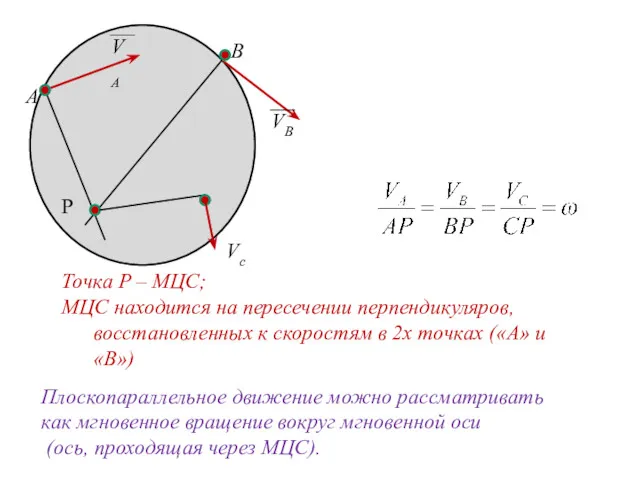
Точка P – МЦС;
МЦС находится на пересечении перпендикуляров, восстановленных к скоростям
P
A
B
VB
VA
Точка P – МЦС;
МЦС находится на пересечении перпендикуляров, восстановленных к скоростям
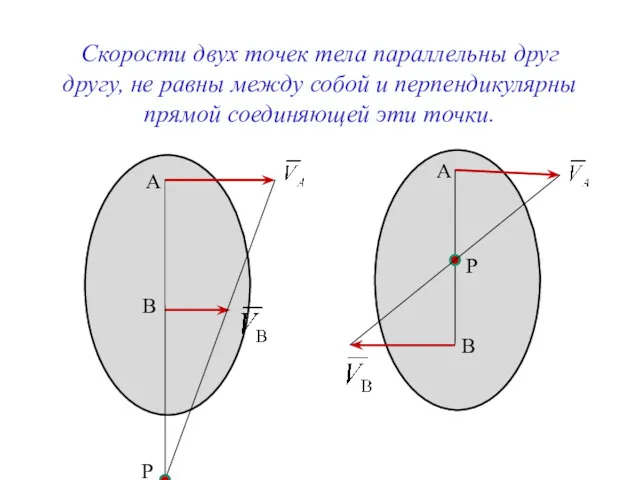
Скорости двух точек тела параллельны друг другу, не равны между собой
Скорости двух точек тела параллельны друг другу, не равны между собой
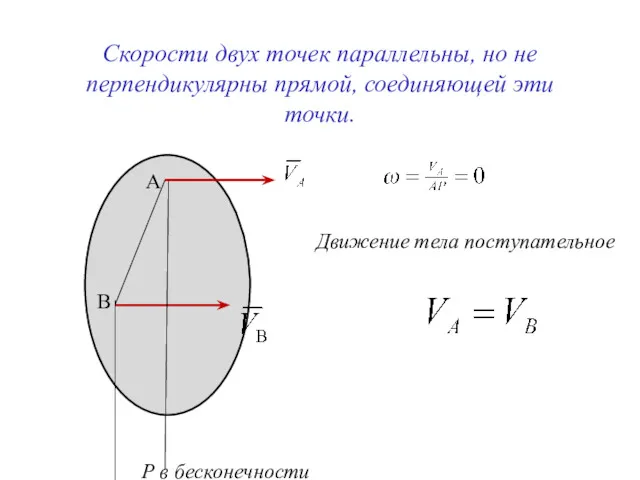
Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки.
А
В
Р
Скорости двух точек параллельны, но не перпендикулярны прямой, соединяющей эти точки.
А
В
Р

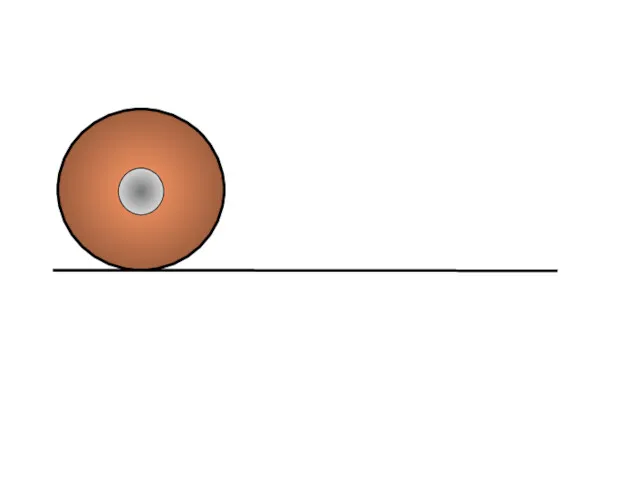
Тело катится без скольжения по неподвижной поверхности.
A
VA
ω
Тело катится без скольжения по неподвижной поверхности.
A
VA
ω
O
O
O
A
A
A
B
B
B
VA
VA
VA
C
C
C
VB
VB
VB
VC
VC
VC
ωOA
ωOA
ωOA
ωAB = 0
ωAB
ωAB
(.) P в ∞ мгн.пост. дв.
(.)P в
O
O
O
A
A
A
B
B
B
VA
VA
VA
C
C
C
VB
VB
VB
VC
VC
VC
ωOA
ωOA
ωOA
ωAB = 0
ωAB
ωAB
(.) P в ∞ мгн.пост. дв.
(.)P в
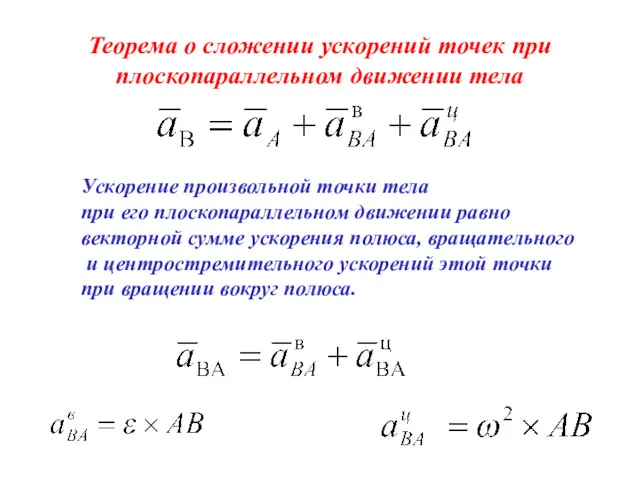
Теорема о сложении ускорений точек при плоскопараллельном движении тела
Ускорение произвольной точки
Теорема о сложении ускорений точек при плоскопараллельном движении тела
Ускорение произвольной точки
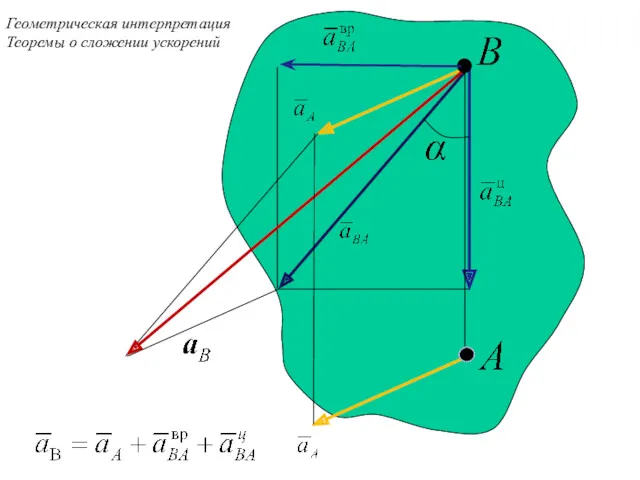
Геометрическая интерпретация
Теоремы о сложении ускорений
Геометрическая интерпретация
Теоремы о сложении ускорений
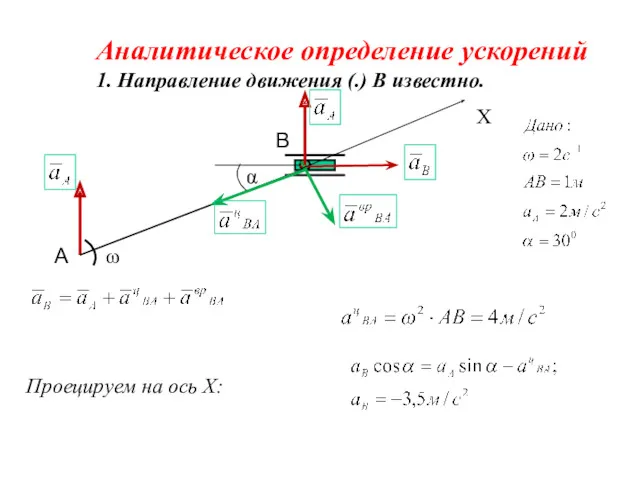
Аналитическое определение ускорений
1. Направление движения (.) В известно.
α
ω
X
Проецируем на ось X:
А
В
Аналитическое определение ускорений
1. Направление движения (.) В известно.
α
ω
X
Проецируем на ось X:
А
В
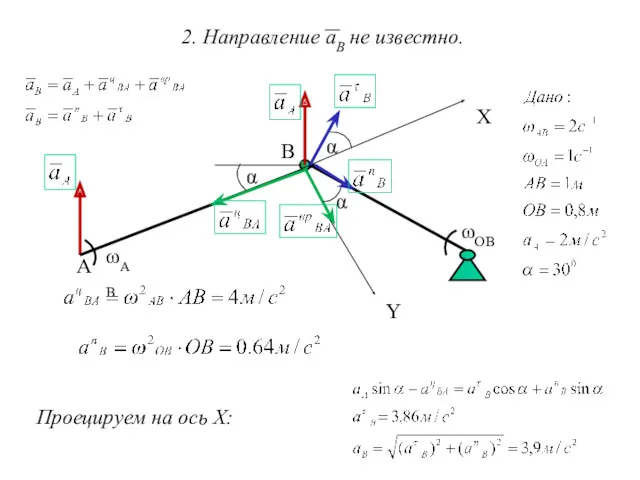
2. Направление аВ не известно.
α
ωAB
X
А
В
α
Y
ωOB
Проецируем на ось X:
α
2. Направление аВ не известно.
α
ωAB
X
А
В
α
Y
ωOB
Проецируем на ось X:
α
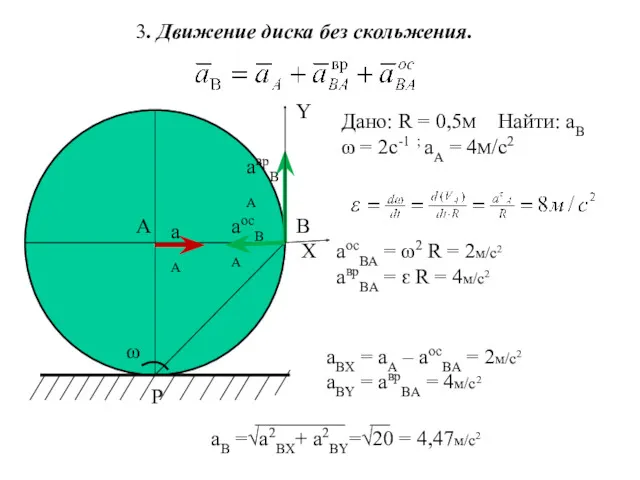
3. Движение диска без скольжения.
Дано: R = 0,5M Найти: aB
ω =
3. Движение диска без скольжения.
Дано: R = 0,5M Найти: aB
ω =

Кинематический анализ плоского механизма.
Найти для заданного положения механизма скорости и ускорения
Кинематический анализ плоского механизма. Найти для заданного положения механизма скорости и ускорения
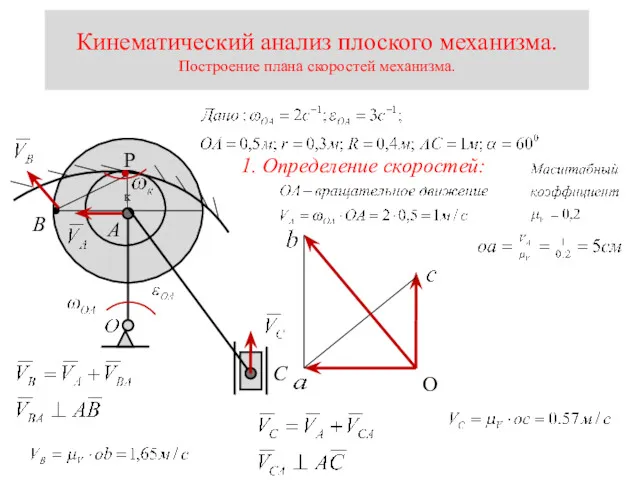
Кинематический анализ плоского механизма.
Построение плана скоростей механизма.
Рк
А
В
С
1. Определение скоростей:
O
Кинематический анализ плоского механизма.
Построение плана скоростей механизма.
Рк
А
В
С
1. Определение скоростей:
O
Свойства плана скоростей
Одноименные отрезки плана скоростей и механизма
взаимно перпендикулярны.
2. Одноименные
Свойства плана скоростей
Одноименные отрезки плана скоростей и механизма
взаимно перпендикулярны.
2. Одноименные
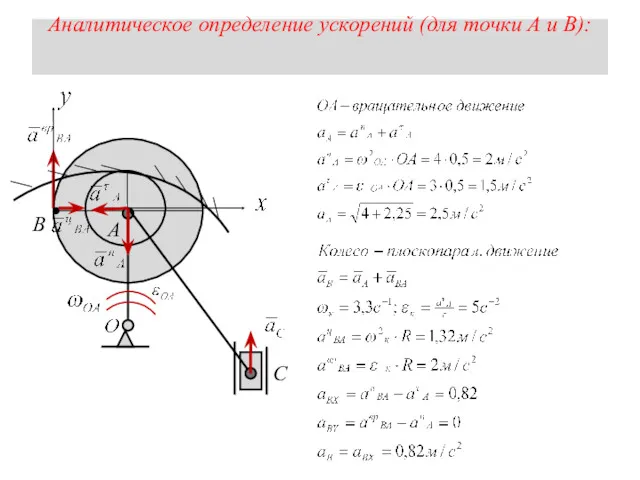
Аналитическое определение ускорений (для точки А и В):
А
В
С
Аналитическое определение ускорений (для точки А и В):
А
В
С
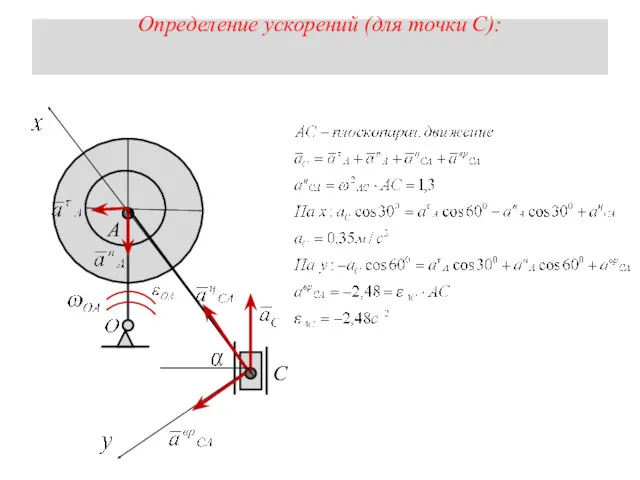
Определение ускорений (для точки С):
А
С
Определение ускорений (для точки С):
А
С
 Кулон заңы
Кулон заңы ПРЕЗЕНТАЦИЯ К УРОКУ-ИССЛЕДОВАНИЮ ПОВЕРХНОСТНОЕ НАТЯЖЕНИЕ
ПРЕЗЕНТАЦИЯ К УРОКУ-ИССЛЕДОВАНИЮ ПОВЕРХНОСТНОЕ НАТЯЖЕНИЕ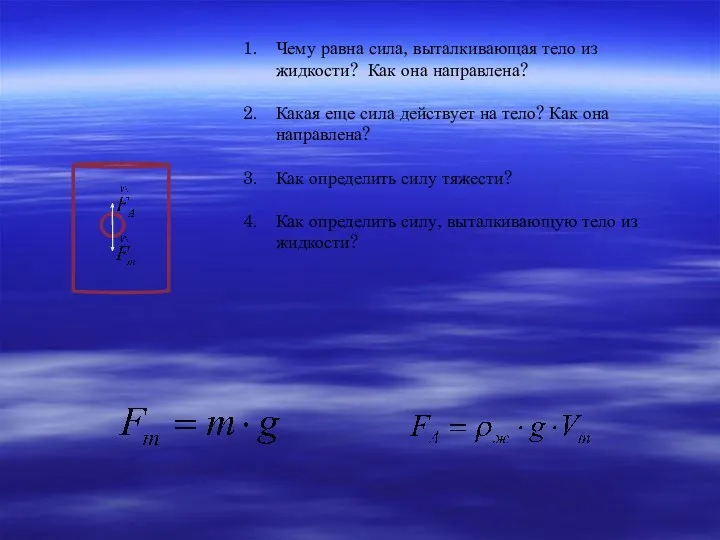 Урок и презентация по теме Плавание тел 7 класс
Урок и презентация по теме Плавание тел 7 класс Статус-отчет по ремонту Сормовский 3060
Статус-отчет по ремонту Сормовский 3060 Электростатическое поле. Закон Кулона. Напряженность электростатического поля
Электростатическое поле. Закон Кулона. Напряженность электростатического поля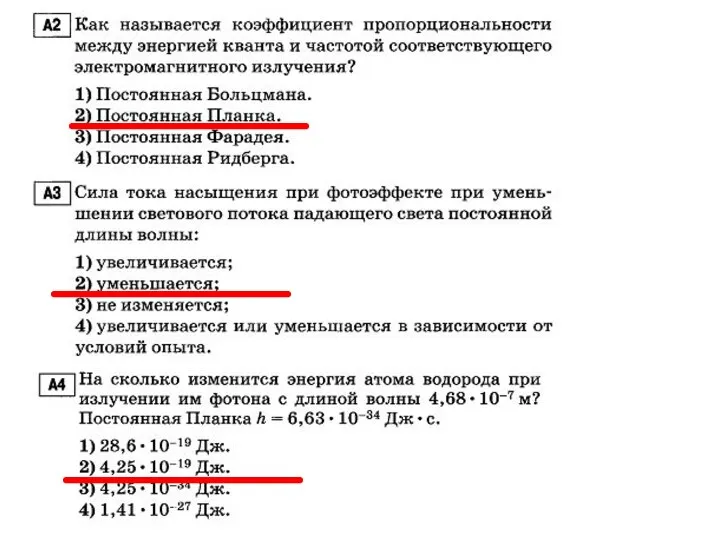 Как называется коэффициент пропорциональности между энергией кванта и частотой соответствующего электромагнитного излучения?
Как называется коэффициент пропорциональности между энергией кванта и частотой соответствующего электромагнитного излучения? Цилиндрические прямозубые передачи
Цилиндрические прямозубые передачи Электромагнитная обстановка на объектах электроэнергетики
Электромагнитная обстановка на объектах электроэнергетики Презентация Через тернии к звёздам
Презентация Через тернии к звёздам Конструирование валов
Конструирование валов Кинематика. Решение задач
Кинематика. Решение задач Нарезание резьбы на металлических деталях
Нарезание резьбы на металлических деталях Реактивное движение и двигатели. Автор Максимова Наталья Сергеевна
Реактивное движение и двигатели. Автор Максимова Наталья Сергеевна Динамика. Законы Ньютона. 10 класс
Динамика. Законы Ньютона. 10 класс Линза. Виды линз
Линза. Виды линз Механические свойства металлов
Механические свойства металлов Альтернативные виды топлива
Альтернативные виды топлива Космические скорости
Космические скорости Приборы и методы радиометрических измерений
Приборы и методы радиометрических измерений Фрикционные передачи
Фрикционные передачи Исследовательская работа Электричество в повседневной жизни
Исследовательская работа Электричество в повседневной жизни Электрические явления.
Электрические явления. Эксплуатация оборудования для ТО и ТР приборов бензиновых систем питания автомобилей (урок 18)
Эксплуатация оборудования для ТО и ТР приборов бензиновых систем питания автомобилей (урок 18) Презентация Звук
Презентация Звук Свойства твердых тел
Свойства твердых тел Начало космической эры и роль ученых нашей страны в изучении вселенной
Начало космической эры и роль ученых нашей страны в изучении вселенной Винаходи під час промислового перевороту в Англії
Винаходи під час промислового перевороту в Англії Типовые примеры сборки узлов и панелей клепанной конструкции
Типовые примеры сборки узлов и панелей клепанной конструкции