- Абсолютно твердое тело. Элементы статики. Основные понятия. Сила. Лекция 1

Содержание
- 2. Статикой называется раздел механики, в котором излагается общее учение о силах и изучаются условия равновесия материальных
- 3. Сила – количественная мера механического взаимодействия материальных тел. Сила является векторной величиной. Ее действие на тело
- 4. Свободное тело – тело, не скрепленное с другими телами, которому можно сообщить любое перемещение в пространстве.
- 5. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними силами называют силы, действующие
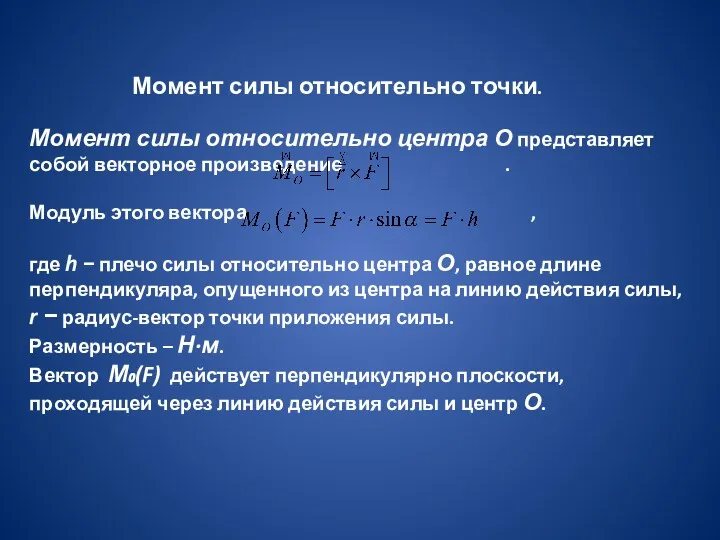
- 6. Момент силы относительно точки. Момент силы относительно центра О представляет собой векторное произведение . Модуль этого
- 7. Свободное тело – тело, не скрепленное с другими телами, которому можно сообщить любое перемещение в пространстве.
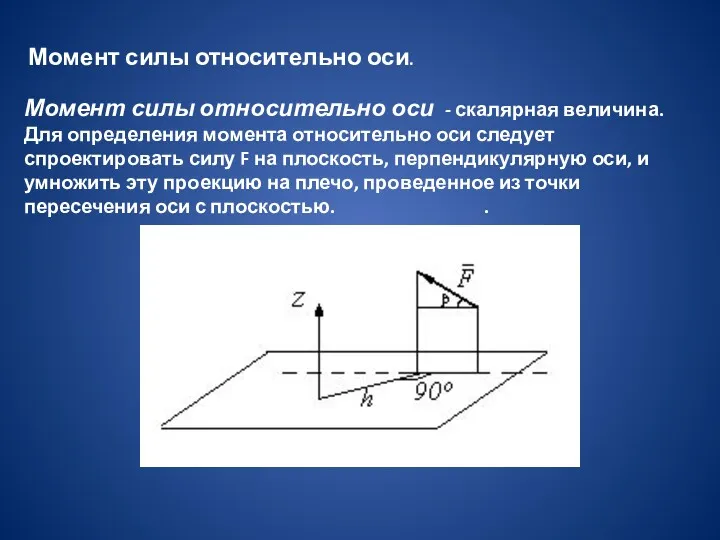
- 8. Момент силы относительно оси. Момент силы относительно оси - скалярная величина. Для определения момента относительно оси
- 9. Момент силы относительно оси равен . Момент силы относительно оси равен нулю в двух случаях: cила
- 10. Силу можно переносить по линии действия. Параллельный перенос силы с сохранением первоначальных условий равновесия возможен лишь
- 11. Условия равновесия произвольной системы сил Для равновесия системы сил, приложенных к твердому телу, в общем случае
- 12. Условия равновесия произвольной плоской системы сил: , где точка 0 – некоторая произвольная точка приведения системы,
- 13. Аксиомы статики. Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может
- 14. Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменится, если к ней прибавить
- 15. Аксиома 3 (Аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную
- 16. Аксиома 4. При воздействии одного материального тела на другое имеет место такое же по величине, но
- 17. Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится,
- 18. Свободным телом называется тело, не скрепленное с другими телами, которое может совершать из данного положения любые
- 19. Основные виды связей. 1. Свободная опора . Тело опирается о гладкую называется поверхность (трением о которую
- 20. 2. Нить. Связь, осуществленная в виде гибкой нерастяжимой нити, не дает телу М удаляться от точки
- 21. 3. Подвижный шарнир. Опирание тел на подвижный шарнир весьма распространено в условиях задач механики. Реакция RА
- 22. 4. Неподвижный шарнир. Этот вид связи обеспечивает свободное вращение тела в месте его закрепления, но запрещает
- 23. 5. Стержень. Стержень АВ закреплен на концах шарнирами. Весом стержня по сравнению с воспринимаемой им нагрузкой
- 24. 6. Заделка (жесткая заделка, защемление). Этот вид связи можно представить как тело, замурованное одним концом в
- 26. Скачать презентацию
Статикой называется раздел механики, в котором излагается общее учение о силах
Статикой называется раздел механики, в котором излагается общее учение о силах
Сила – количественная мера механического взаимодействия материальных тел.
Сила является векторной
Сила – количественная мера механического взаимодействия материальных тел.
Сила является векторной
Свободное тело – тело, не скрепленное с другими телами, которому можно
Свободное тело – тело, не скрепленное с другими телами, которому можно
Силы, действующие на твердое тело, можно разделить на внешние и внутренние.
Внешними
Силы, действующие на твердое тело, можно разделить на внешние и внутренние.
Внешними
Момент силы относительно точки.
Момент силы относительно центра О представляет собой
Момент силы относительно точки.
Момент силы относительно центра О представляет собой
Свободное тело – тело, не скрепленное с другими телами, которому можно
Свободное тело – тело, не скрепленное с другими телами, которому можно
Момент силы относительно оси.
Момент силы относительно оси - скалярная величина.
Момент силы относительно оси.
Момент силы относительно оси - скалярная величина.
Момент силы относительно оси равен .
Момент силы относительно оси равен нулю
Момент силы относительно оси равен .
Момент силы относительно оси равен нулю
Силу можно переносить по линии действия.
Параллельный перенос силы с сохранением первоначальных
Силу можно переносить по линии действия.
Параллельный перенос силы с сохранением первоначальных
Условия равновесия произвольной системы сил
Для равновесия системы сил, приложенных к
Условия равновесия произвольной системы сил
Для равновесия системы сил, приложенных к
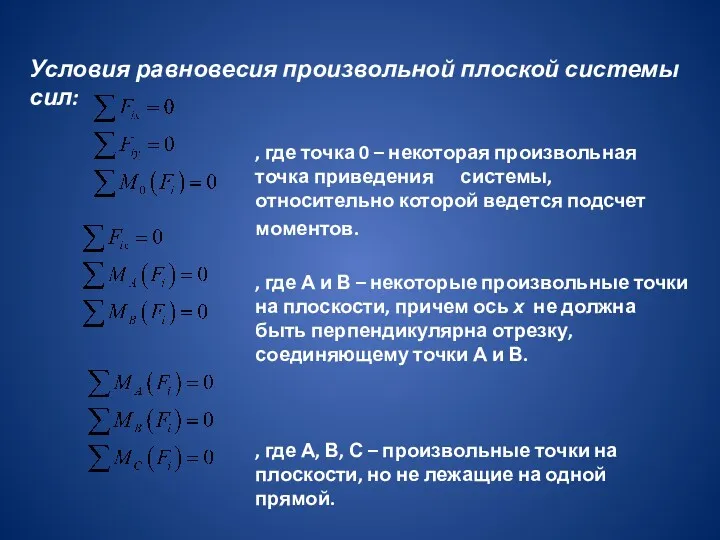
Условия равновесия произвольной плоской системы сил:
, где точка 0 – некоторая
Условия равновесия произвольной плоской системы сил:
, где точка 0 – некоторая
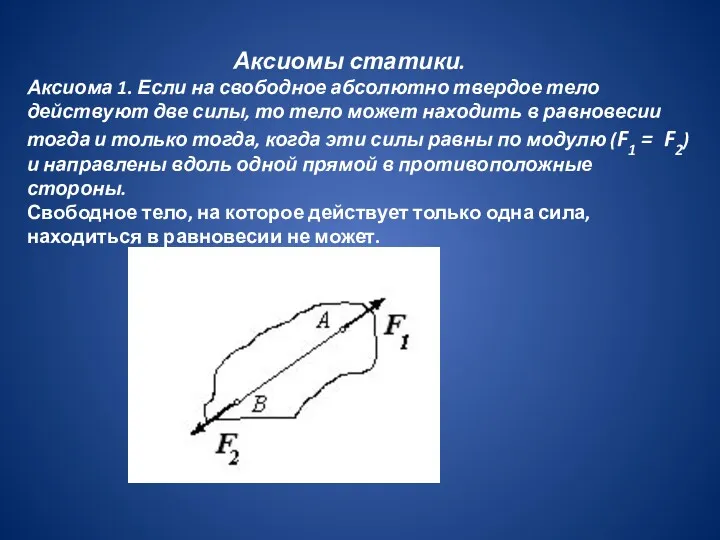
Аксиомы статики.
Аксиома 1. Если на свободное абсолютно твердое тело действуют
Аксиомы статики.
Аксиома 1. Если на свободное абсолютно твердое тело действуют
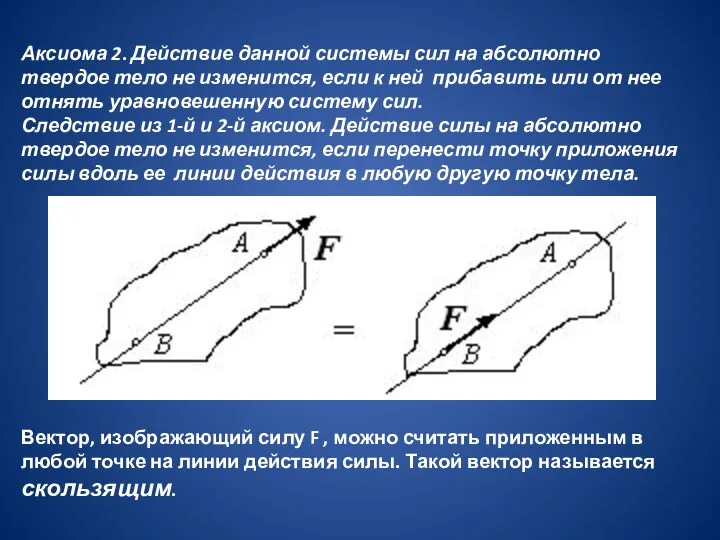
Аксиома 2. Действие данной системы сил на абсолютно твердое тело не
Аксиома 2. Действие данной системы сил на абсолютно твердое тело не
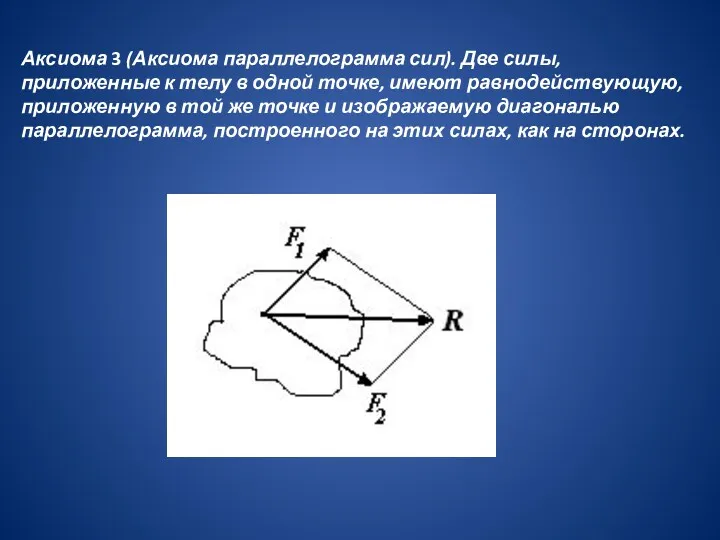
Аксиома 3 (Аксиома параллелограмма сил). Две силы, приложенные к телу в
Аксиома 3 (Аксиома параллелограмма сил). Две силы, приложенные к телу в
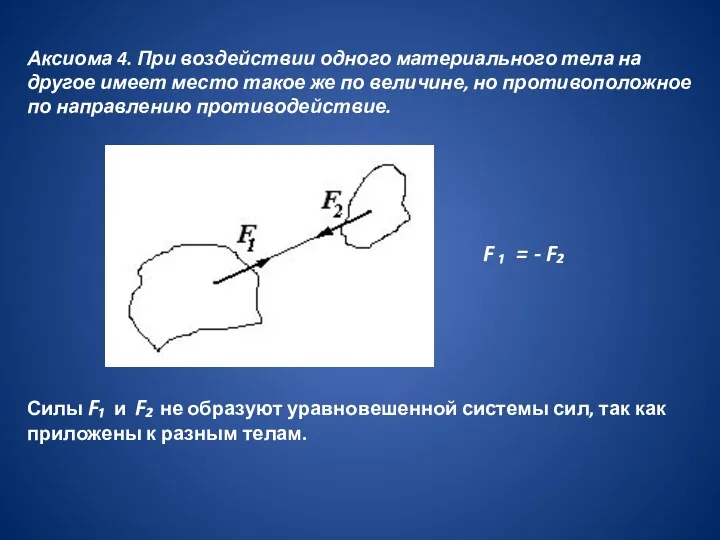
Аксиома 4. При воздействии одного материального тела на другое имеет место
Аксиома 4. При воздействии одного материального тела на другое имеет место
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием
Свободным телом называется тело, не скрепленное с другими телами, которое может
Свободным телом называется тело, не скрепленное с другими телами, которое может
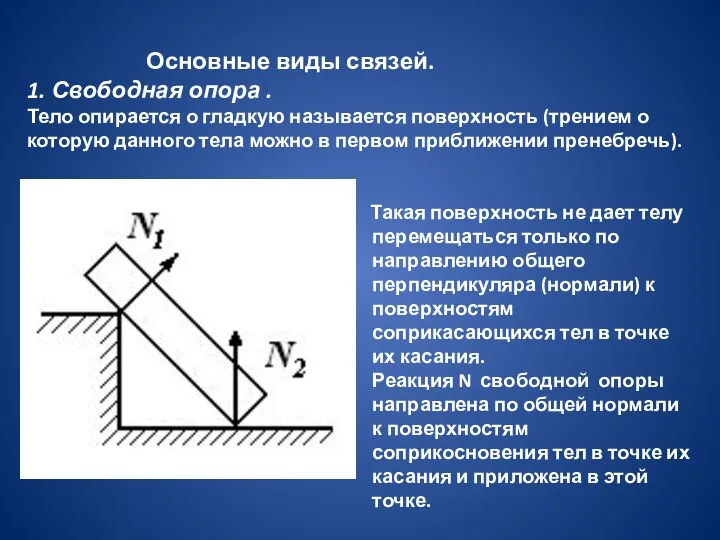
Основные виды связей.
1. Свободная опора .
Тело опирается о гладкую называется
Основные виды связей.
1. Свободная опора .
Тело опирается о гладкую называется
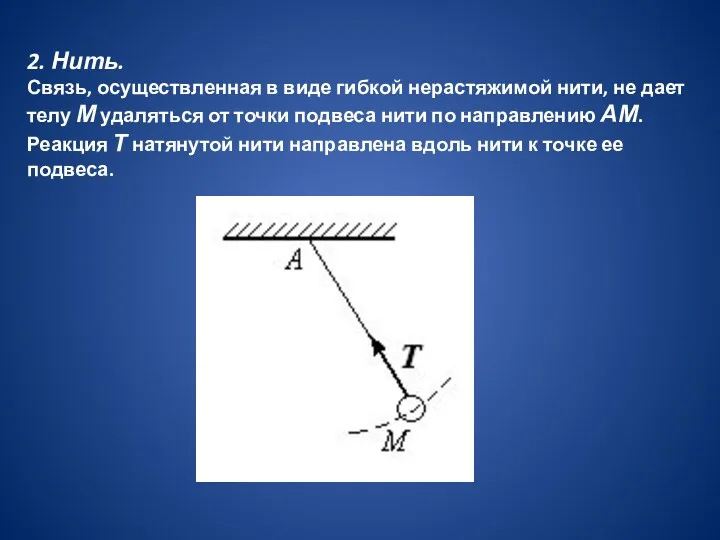
2. Нить.
Связь, осуществленная в виде гибкой нерастяжимой нити, не дает телу
2. Нить.
Связь, осуществленная в виде гибкой нерастяжимой нити, не дает телу
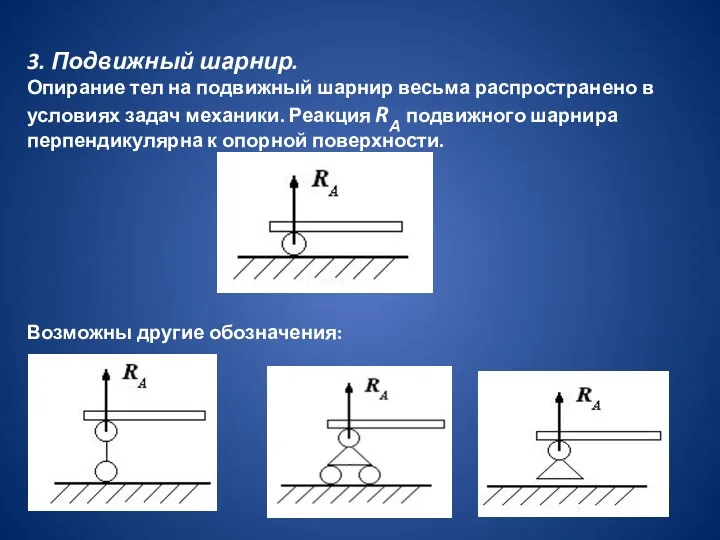
3. Подвижный шарнир.
Опирание тел на подвижный шарнир весьма распространено в условиях
3. Подвижный шарнир.
Опирание тел на подвижный шарнир весьма распространено в условиях
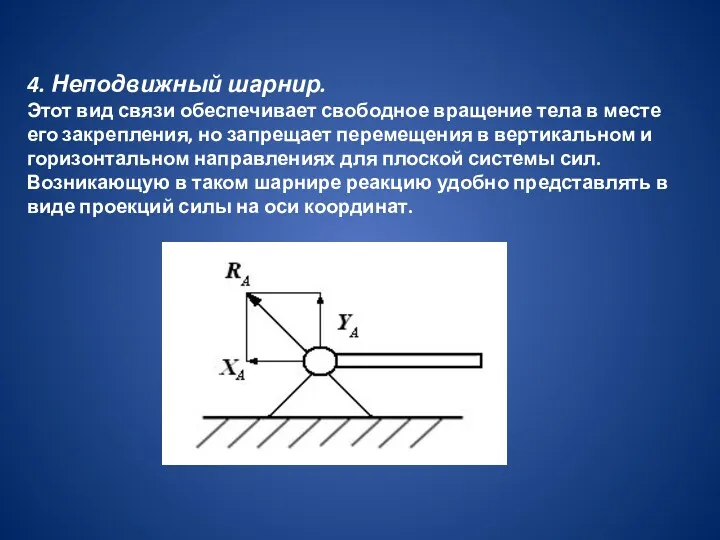
4. Неподвижный шарнир.
Этот вид связи обеспечивает свободное вращение тела в месте
4. Неподвижный шарнир.
Этот вид связи обеспечивает свободное вращение тела в месте
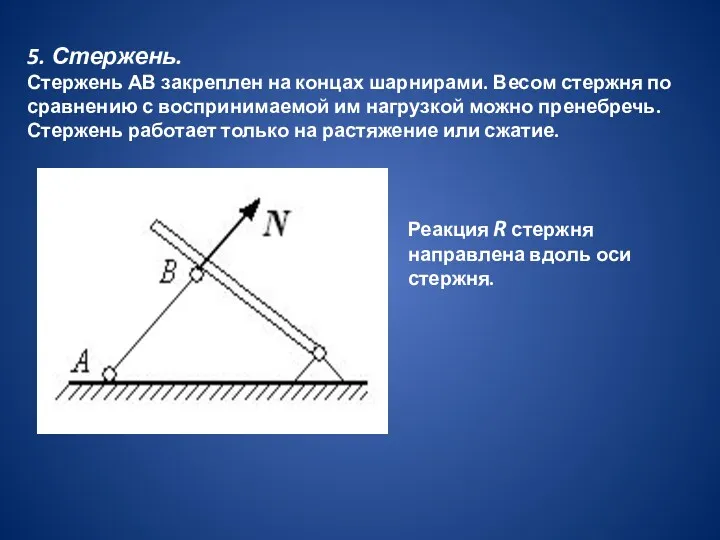
5. Стержень.
Стержень АВ закреплен на концах шарнирами. Весом стержня по сравнению
5. Стержень.
Стержень АВ закреплен на концах шарнирами. Весом стержня по сравнению
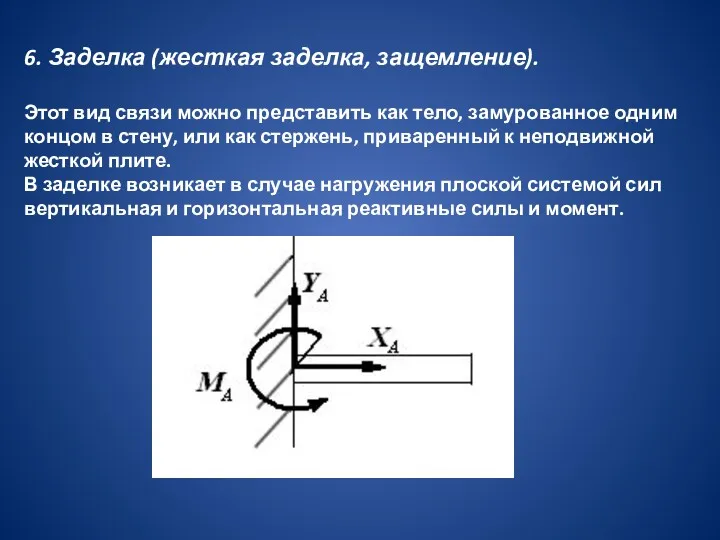
6. Заделка (жесткая заделка, защемление).
Этот вид связи можно представить как тело,
6. Заделка (жесткая заделка, защемление).
Этот вид связи можно представить как тело,
 Электродинамика. Задачи
Электродинамика. Задачи Goorui Company Introduction
Goorui Company Introduction Биологическое действие радиации. Закон радиоактивного распада
Биологическое действие радиации. Закон радиоактивного распада Представления об атоме в разных концепциях
Представления об атоме в разных концепциях Динамика кулисного механизма
Динамика кулисного механизма Взаимная индукция и трансформаторы. Энергия магнитного поля
Взаимная индукция и трансформаторы. Энергия магнитного поля 20230211_fizika_7_klass_plotnost_veshchestva._zadachi
20230211_fizika_7_klass_plotnost_veshchestva._zadachi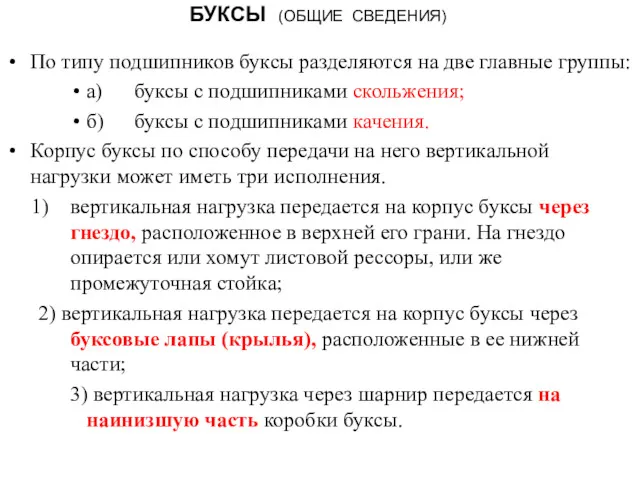 Буксы. Общие сведения
Буксы. Общие сведения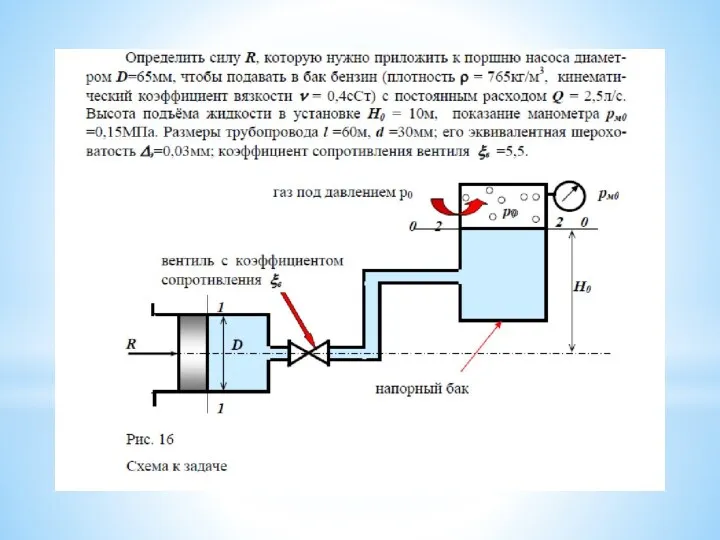 Сила R
Сила R Аналіз лінійних кіл постійного струму при безпосередньому застосуванні законів Кірхгофа
Аналіз лінійних кіл постійного струму при безпосередньому застосуванні законів Кірхгофа Расчет частотных характеристик простейших электрических цепей
Расчет частотных характеристик простейших электрических цепей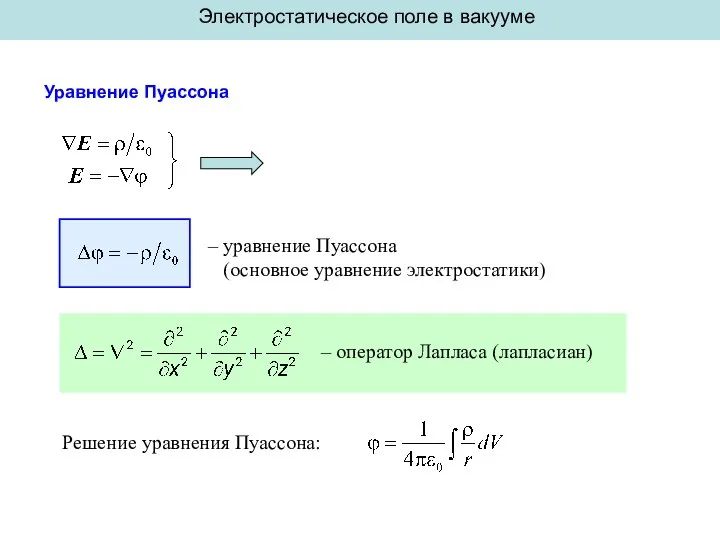 Уравнение Пуассона. Электростатическое поле в вакууме
Уравнение Пуассона. Электростатическое поле в вакууме Реферат вол.гравит. Сидоров1РФ41
Реферат вол.гравит. Сидоров1РФ41 Кернеу мен потенциалды өлшейтін құралдар
Кернеу мен потенциалды өлшейтін құралдар Разработка участка тормозной системы на предприятии Гринлайт
Разработка участка тормозной системы на предприятии Гринлайт Изучение сцепок и направляющих устройств
Изучение сцепок и направляющих устройств Учебные презентации по физике по темам Электромагнитные волны и Строение атома
Учебные презентации по физике по темам Электромагнитные волны и Строение атома Искусственные спутники Земли
Искусственные спутники Земли Презентация урока по электротехнике
Презентация урока по электротехнике Хроматографические методы анализа и их применение для контроля качества лекарственных средств
Хроматографические методы анализа и их применение для контроля качества лекарственных средств Electricity
Electricity 61f4bb8105f047b8922e06e3e916ed53
61f4bb8105f047b8922e06e3e916ed53 Апарати для дослідження океанічних глибин
Апарати для дослідження океанічних глибин Internal Combustion engine
Internal Combustion engine Разработка установки для измерения магнитострикции
Разработка установки для измерения магнитострикции Транспортная энергетика. Общие понятия энергетики
Транспортная энергетика. Общие понятия энергетики Презентация Применение радиолокации в годы Великой Отечественной войны, урок физики 11 кл.
Презентация Применение радиолокации в годы Великой Отечественной войны, урок физики 11 кл. Диэлектрики и проводники в электрическом поле
Диэлектрики и проводники в электрическом поле