Аэродинамика и летно-технические данные вертолёта. Тема №1. Физическая сущность необходимости постановки шарниров. ГЗ №3 презентация
- Аэродинамика и летно-технические данные вертолёта. Тема №1. Физическая сущность необходимости постановки шарниров. ГЗ №3

Содержание
- 3. Учебные вопросы: 1. Необходимость постановки горизонтального шарнира 2. Необходимость постановки вертикального шарнира 3. Полная аэродинамическая сила
- 4. Вопрос №1 Необходимость постановки горизонтального шарнира Недостатки НВ с жестким креплением лопастей. Распределенная нагрузка ТЭ стремится
- 5. Назначение горизонтального шарнира. Горизонтальный шарнир лопасти НВ предназначен для разгрузки ее комля и втулки НВ от
- 6. Физическая сущность завала оси конуса НВ. У наступающей лопасти тяга растет и достигает своего максимального значения
- 7. Назначение регулятора взмаха Регулятор взмаха предназначен для уменьшения амплитуды маховых колебаний лопастей и завала конуса НВ
- 9. Вопрос№2 Необходимость постановки вертикального шарнира. При наличии горизонтального шарнира и косом обтекании НВ кроме сил сопротивления
- 10. Назначение вертикального шарнира, работа лопасти с ВШ. Вертикальные шарниры предназначены для разгрузки комлевых участков лопастей и
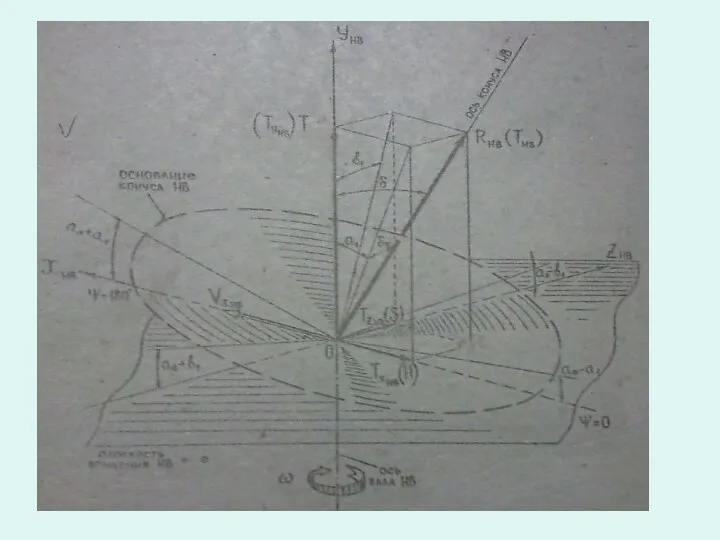
- 11. Вопрос№3 Полная аэродинамическая сила несущего винта. Принцип работы автомата перекоса. При осевом обтекании полная аэродинамическая сила
- 13. Управление несущим винтом Управление несущим винтом в пространстве осуществляется изменением величины и направления полной аэродинамической силы
- 16. Принцип работы автомата перекоса Автомат перекоса предназначен для управления вертолетом в продольном и поперечном направлениях путем
- 18. Скачать презентацию

Учебные вопросы:
1. Необходимость постановки горизонтального шарнира
2. Необходимость постановки вертикального шарнира
3. Полная
Учебные вопросы:
1. Необходимость постановки горизонтального шарнира
2. Необходимость постановки вертикального шарнира
3. Полная
Вопрос №1 Необходимость постановки горизонтального шарнира
Недостатки НВ с жестким креплением лопастей.
Распределенная
Вопрос №1 Необходимость постановки горизонтального шарнира
Недостатки НВ с жестким креплением лопастей.
Распределенная
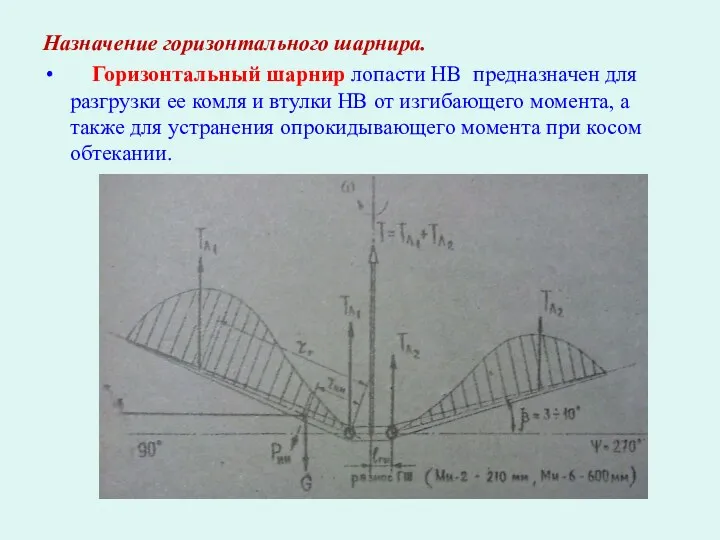
Назначение горизонтального шарнира.
Горизонтальный шарнир лопасти НВ предназначен для разгрузки ее
Назначение горизонтального шарнира.
Горизонтальный шарнир лопасти НВ предназначен для разгрузки ее

Физическая сущность завала оси конуса НВ.
У наступающей лопасти тяга растет и
Физическая сущность завала оси конуса НВ.
У наступающей лопасти тяга растет и

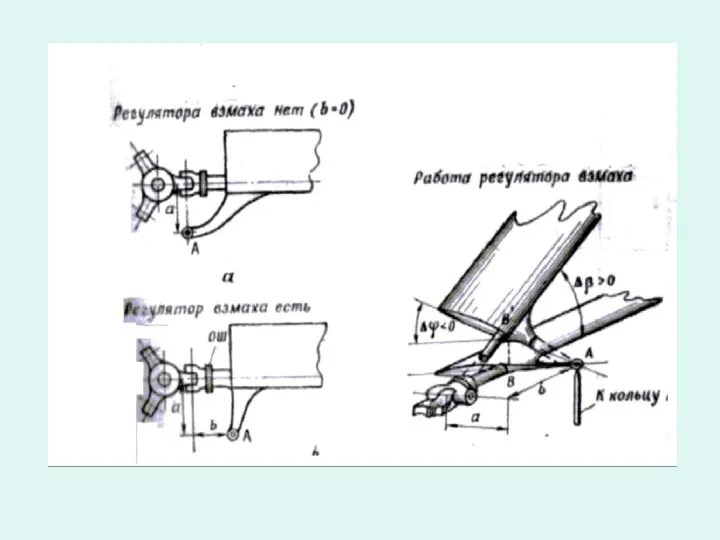
Назначение регулятора взмаха
Регулятор взмаха предназначен для уменьшения амплитуды маховых колебаний лопастей
Назначение регулятора взмаха
Регулятор взмаха предназначен для уменьшения амплитуды маховых колебаний лопастей
Вопрос№2 Необходимость постановки вертикального шарнира.
При наличии горизонтального шарнира и косом обтекании
Вопрос№2 Необходимость постановки вертикального шарнира.
При наличии горизонтального шарнира и косом обтекании

Назначение вертикального шарнира, работа лопасти с ВШ.
Вертикальные шарниры предназначены для
Назначение вертикального шарнира, работа лопасти с ВШ.
Вертикальные шарниры предназначены для
Вопрос№3 Полная аэродинамическая сила несущего винта. Принцип работы автомата перекоса.
При осевом
Вопрос№3 Полная аэродинамическая сила несущего винта. Принцип работы автомата перекоса.
При осевом
Управление несущим винтом
Управление несущим винтом в пространстве осуществляется изменением величины и
Управление несущим винтом
Управление несущим винтом в пространстве осуществляется изменением величины и
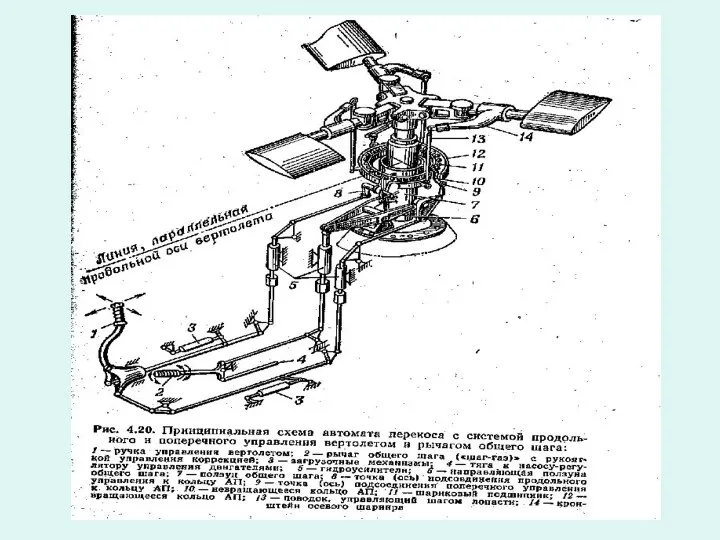

Принцип работы автомата перекоса
Автомат перекоса предназначен для управления вертолетом в
Принцип работы автомата перекоса
Автомат перекоса предназначен для управления вертолетом в
 Презентация по теме Давление твердых тел
Презентация по теме Давление твердых тел Задачи по квантовой механике
Задачи по квантовой механике Холодильні машини
Холодильні машини Применение интерференции в технике
Применение интерференции в технике Презентация Радиация
Презентация Радиация Сила тяжести. Явление тяготения - презентация к уроку для 8 класса коррекционной школы для детей с ОВЗ
Сила тяжести. Явление тяготения - презентация к уроку для 8 класса коррекционной школы для детей с ОВЗ Действие произвольной возмущающей нагрузки
Действие произвольной возмущающей нагрузки Разработка алгоритмов диагностики электросистем легкового автомобиля
Разработка алгоритмов диагностики электросистем легкового автомобиля Рентгеновское излучение
Рентгеновское излучение Метод Годунова для численного моделирования газодинамических течений
Метод Годунова для численного моделирования газодинамических течений Статические свойства атомных ядер. Ядерные модели
Статические свойства атомных ядер. Ядерные модели Презентация по физике на тему В мире звуков
Презентация по физике на тему В мире звуков Философские проблемы науки и техники. Наука, ее сущность и особенности возникновения. (Лекции 1-2)
Философские проблемы науки и техники. Наука, ее сущность и особенности возникновения. (Лекции 1-2) Математические модели процессов тепломассообмена
Математические модели процессов тепломассообмена Принцип действия тепловых двигателей КПД. Урок № 35. 10 класс
Принцип действия тепловых двигателей КПД. Урок № 35. 10 класс Внеклассное мероприятие Физика вокруг нас.
Внеклассное мероприятие Физика вокруг нас. Движение заряженных частиц в магнитном поле
Движение заряженных частиц в магнитном поле Кипение. Влажность воздуха. Способы определения влажности воздуха
Кипение. Влажность воздуха. Способы определения влажности воздуха Жұдырықшалы механизмдерді жіктеу
Жұдырықшалы механизмдерді жіктеу Превращение энергии. (Окружающий мир, 3 класс)
Превращение энергии. (Окружающий мир, 3 класс) Устройство тормозной системы автомобиля
Устройство тормозной системы автомобиля Подготовка к ЕГЭ и ГИА по физике (вариант 1, задания 13-32)
Подготовка к ЕГЭ и ГИА по физике (вариант 1, задания 13-32) Рентгеновские аппараты. Цифровые рентгенодиагностические комплексы. (Лекция 10)
Рентгеновские аппараты. Цифровые рентгенодиагностические комплексы. (Лекция 10) Элементы ядерной физики
Элементы ядерной физики Давление. Урок повторения и обобщения. 7 класс
Давление. Урок повторения и обобщения. 7 класс физика в сказках
физика в сказках Исследовательское проектирование прибрежных волноэнергетических систем
Исследовательское проектирование прибрежных волноэнергетических систем Неделя физики: Физика в мультфильмах
Неделя физики: Физика в мультфильмах