- Алгоритм FDTD. Введение в метод FDTD

Содержание
- 2. Введение в метод FDTD FDTD - "finite-difference time-domain", в русскоязычной литературе КРВО - "конечные разности во
- 3. В 1966 г. Йе (Yee) разработал технику, реализующую явную конечно - разностную схему второго порядка для
- 4. Исходными являются уравнения Максвелла в дифференциальной форме rot(H) = ∂D/∂t + J; div(B)=0; (1) rot(E) =
- 5. Для решения уравнения (1) следует выразить в декартовых координатах векторы Е и Н: Е = Ex(t,x,y,z)X+
- 6. Yee (1966) предложил пространственную сетку для конечно-разностной аппроксимации, в которую поместил вектора Ex, Ey, Ez, Hx,
- 7. Все компоненты (Ex, Ey, Ez, Hx, Hy, Hz) находятся в разных местах, т.е. разнесены в пространстве.
- 8. Поля E и H вычисляются со сдвигом на полшага по времени. Обозначения, введенные Yee, следующие: En
- 9. Поставим (3) и (2) в (1). Получим: rot(H) X = εεo∂Ex /∂t + σEx; (5) rot(E)
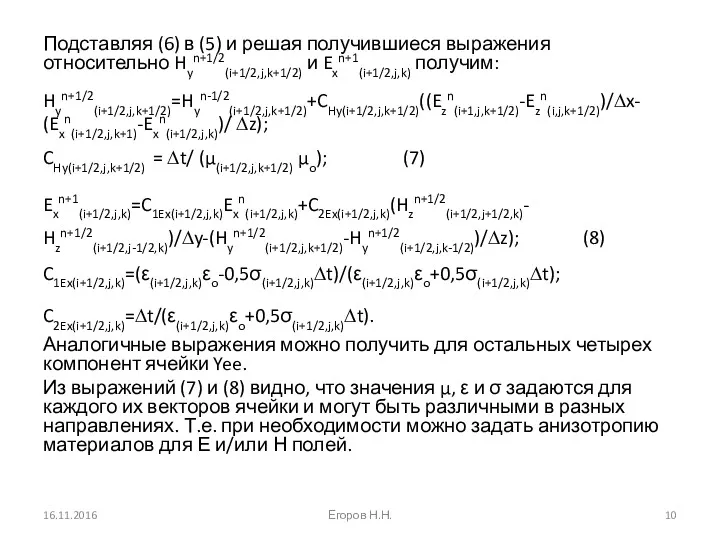
- 10. Подставляя (6) в (5) и решая получившиеся выражения относительно Hyn+1/2(i+1/2,j,k+1/2) и Exn+1(i+1/2,j,k) получим: Hyn+1/2(i+1/2,j,k+1/2)=Hyn-1/2(i+1/2,j,k+1/2)+CHy(i+1/2,j,k+1/2)((Ezn(i+1,j,k+1/2)-Ezn(i,j,k+1/2))/∆x- (Exn(i+1/2,j,k+1)-Exn(i+1/2,j,k))/ ∆z);
- 11. 16.11.2016 Егоров Н.Н.
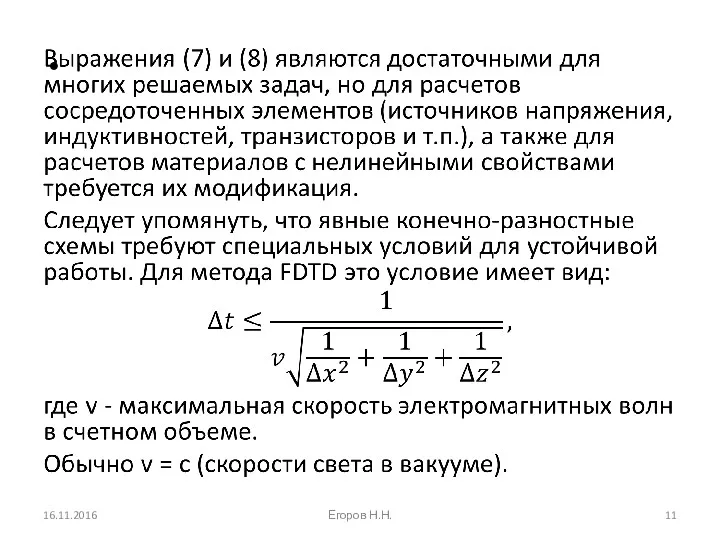
- 12. Базовый алгоритм FDTD Выше кратко описан вывод конечно-разностных уравнений в декартовых координатах для двух компонент сетки
- 13. Примечания. 1. Полуцелые индексы, которые применены в нотации Yee, часто заменяются на целые путем уменьшения на
- 14. Шесть уравнений базового алгоритма очень просты в реализации. Для этого необходимо создать шесть массивов Ex, Ey,
- 15. Вычисление полей Е и Н ведется рекурсивно: для вычисления значений на текущем шаге по времени используются
- 16. Две процедуры вычисляют поля E и H: // ОПРЕДЕЛЕНИЕ МАГНИТНОГО ПОЛЯ H Procedure TimeStepForH; var I,J,K:
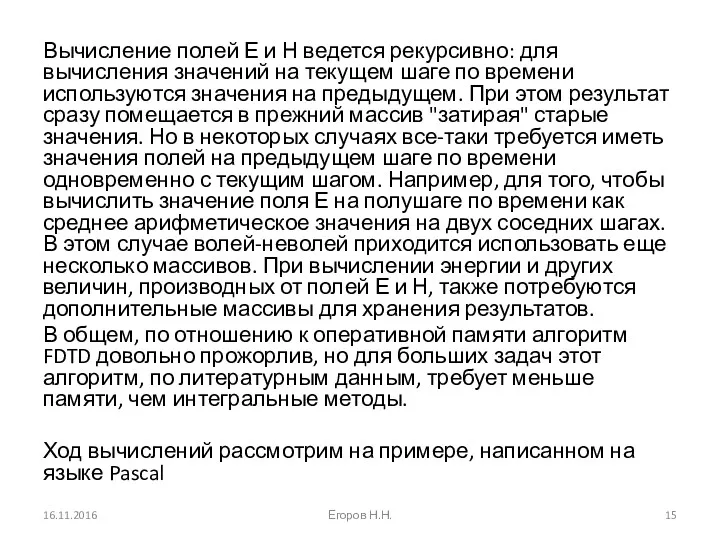
- 17. // ОПРЕДЕЛЕНИЕ ЭЛЕКТРИЧЕСКОГО ПОЛЯ E Procedure TimeStepForE; var I,J,K: Integer; begin for I:=1 to XSize-1 do
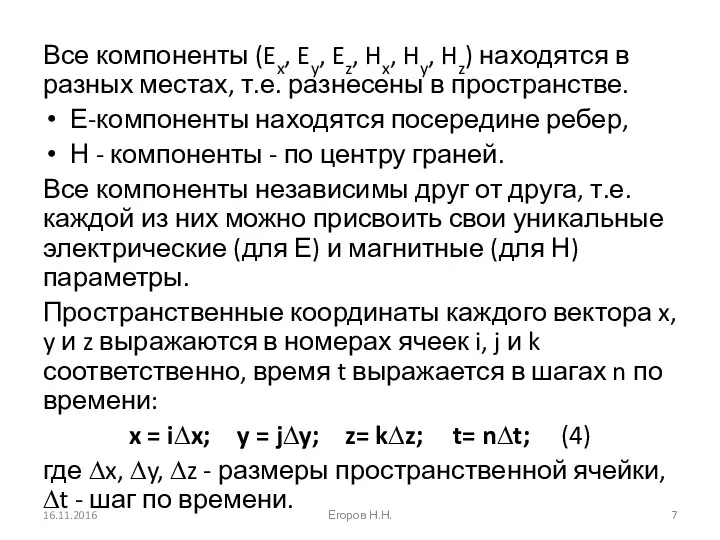
- 18. Массивы AE[I,J,K], BE[I,J,K] и AН[I,J,K] - это предварительно вычисленные коэффициенты С1, С2 и С соответственно из
- 19. Приведенные процедуры вызываются в цикле по времени: // ГЛАВНЫЙ ЦИКЛ ПО ВРЕМЕНИ T:=0; //Исходное значение времени
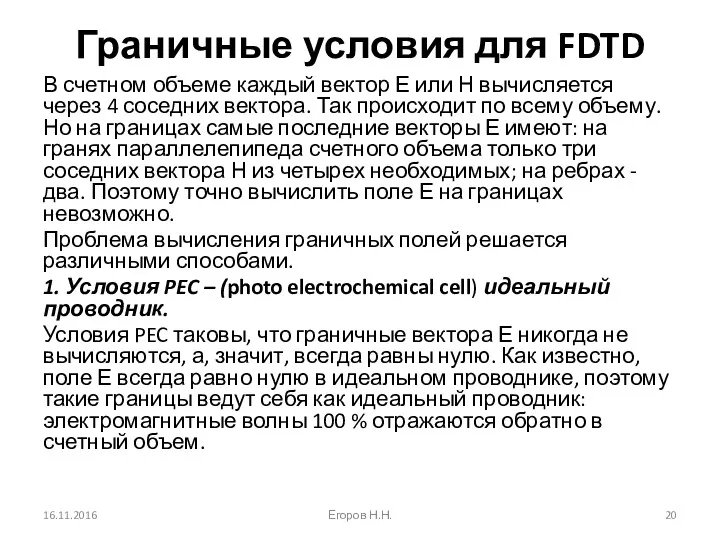
- 20. Граничные условия для FDTD В счетном объеме каждый вектор Е или Н вычисляется через 4 соседних
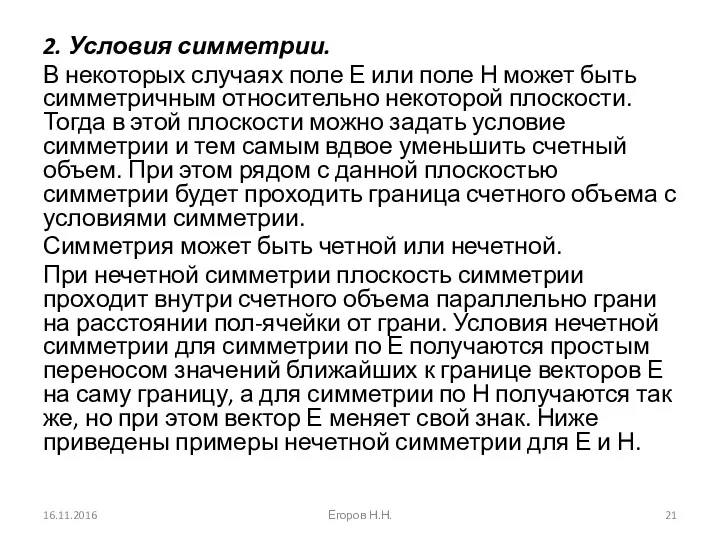
- 21. 2. Условия симметрии. В некоторых случаях поле Е или поле Н может быть симметричным относительно некоторой
- 22. Пример: нечетная симметрия по Е: // ПЛОСКОСТЬ Y=1/2 симметрична по E For I:=1 to NX-1 do
- 23. Условия четной симметрии несколько сложнее. Плоскость симметрии проходит на расстоянии целой ячейки от границы, поэтому кроме
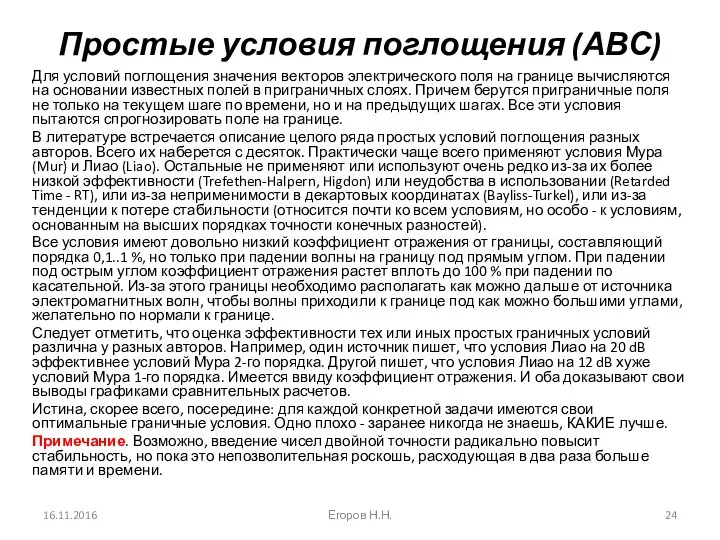
- 24. Простые условия поглощения (АВС) Для условий поглощения значения векторов электрического поля на границе вычисляются на основании
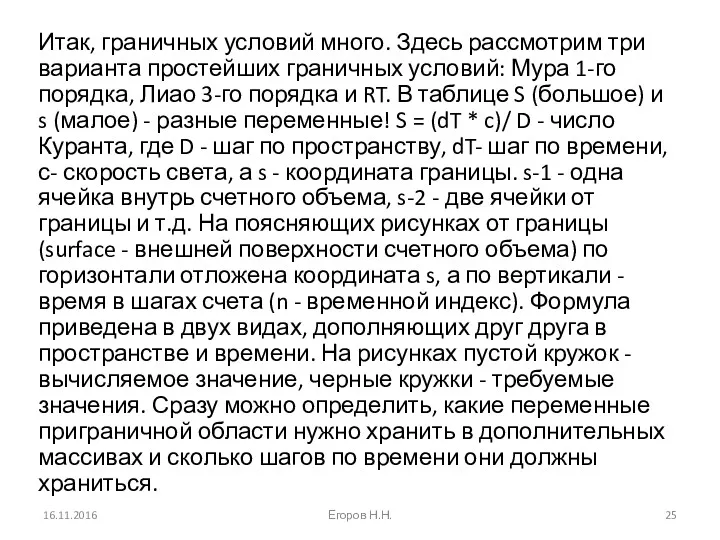
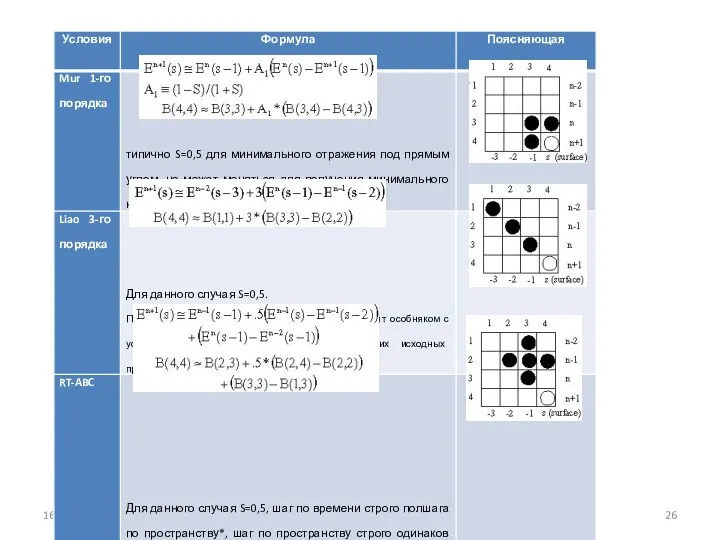
- 25. Итак, граничных условий много. Здесь рассмотрим три варианта простейших граничных условий: Мура 1-го порядка, Лиао 3-го
- 26. 16.11.2016 Егоров Н.Н.
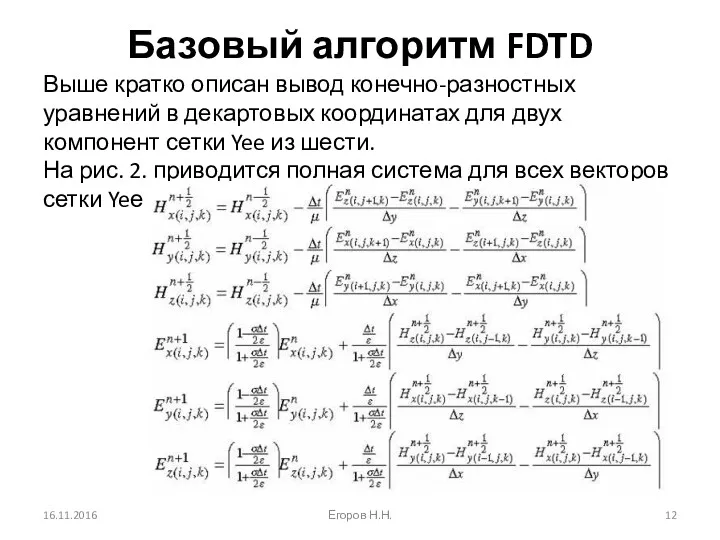
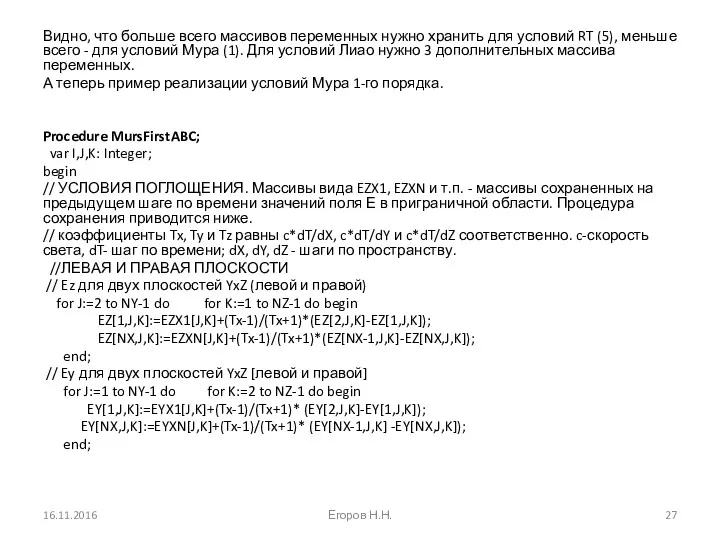
- 27. Видно, что больше всего массивов переменных нужно хранить для условий RT (5), меньше всего - для
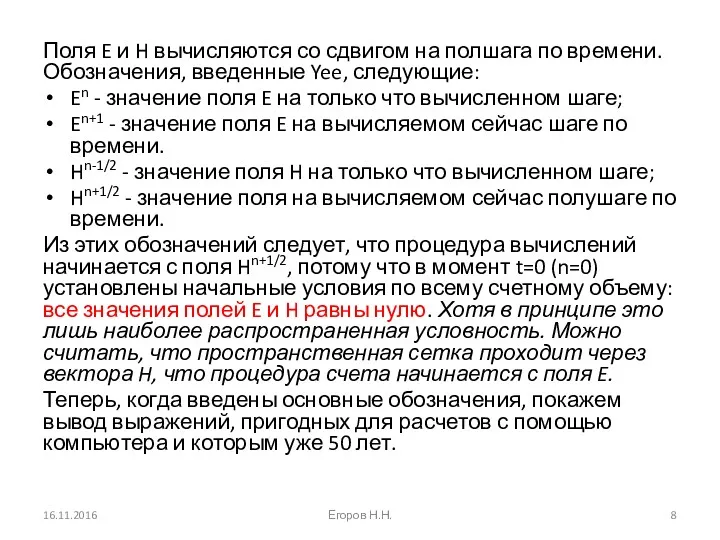
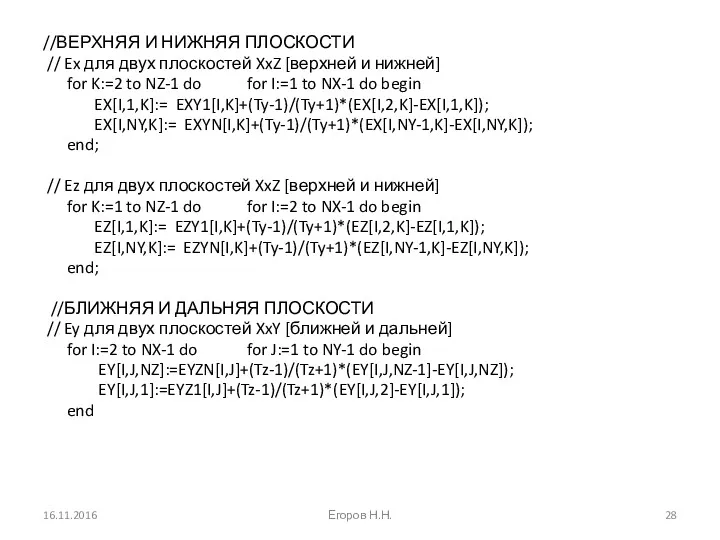
- 28. //ВЕРХНЯЯ И НИЖНЯЯ ПЛОСКОСТИ // Ex для двух плоскостей XxZ [верхней и нижней] for K:=2 to
- 29. // Ex для двух плоскостей XxY [ближней и дальней] for I:=1 to NX-1 do for J:=2
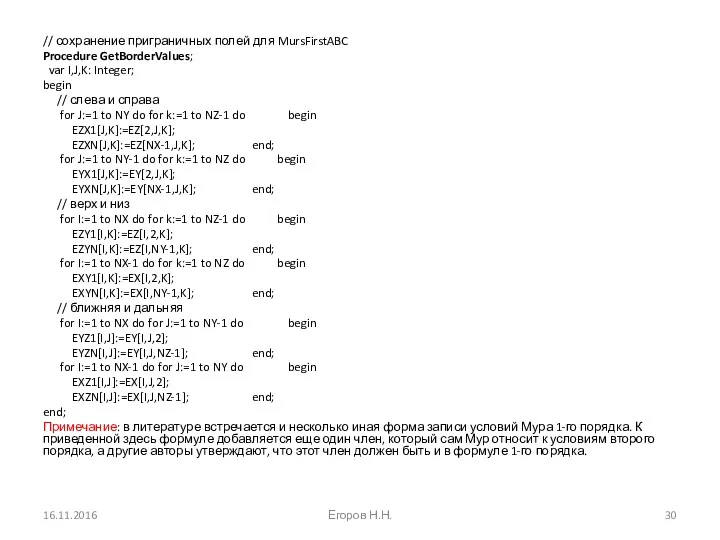
- 30. // сохранение приграничных полей для MursFirstABC Procedure GetBorderValues; var I,J,K: Integer; begin // слева и справа
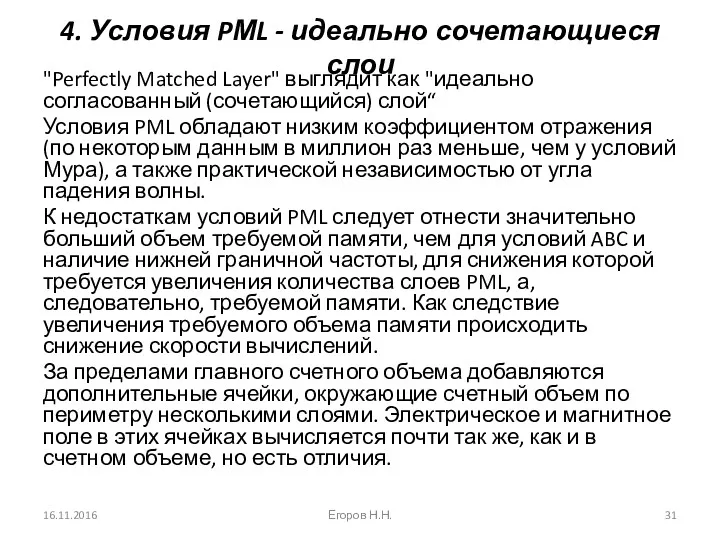
- 31. 4. Условия PМL - идеально сочетающиеся слои "Perfectly Matched Layer" выглядит как "идеально согласованный (сочетающийся) слой“
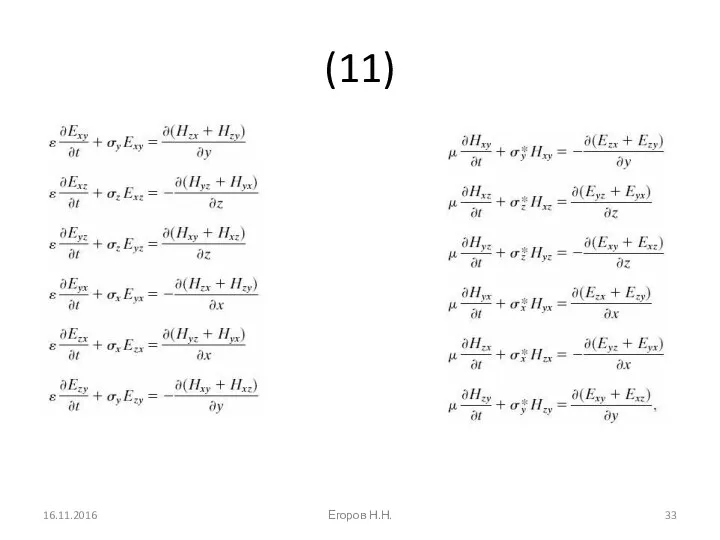
- 32. Во-первых, в уравнения в обязательном порядке вводятся электрические и магнитные потери. В главном алгоритме этих потерь
- 33. (11) 16.11.2016 Егоров Н.Н.
- 34. Примечание Схему Беренгера называют «раздельной», т.к. вводится разделение векторов. Есть также предложения других авторов применять «нераздельную»
- 35. В третьих, теоретически, если выполняется условие σi/ εo = σi*/ μo, (12) то на границе раздела
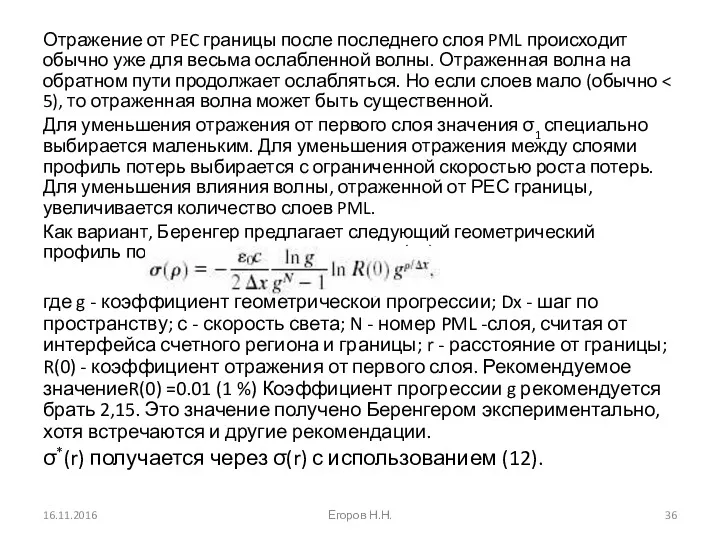
- 36. Отражение от PEC границы после последнего слоя PML происходит обычно уже для весьма ослабленной волны. Отраженная
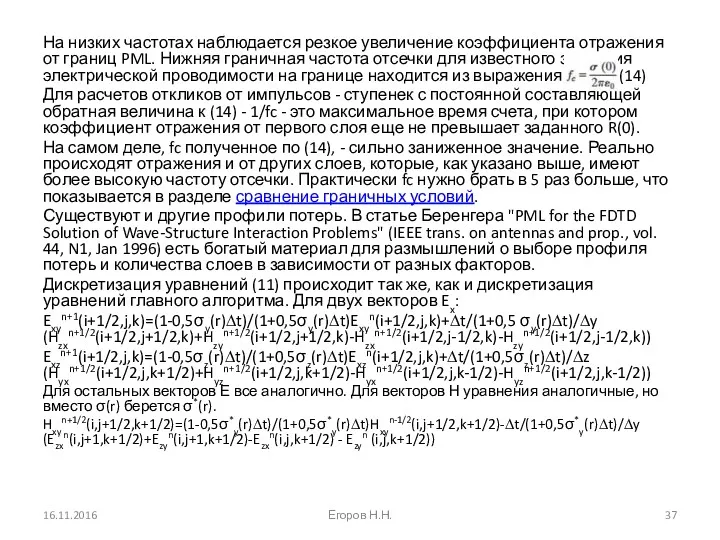
- 37. На низких частотах наблюдается резкое увеличение коэффициента отражения от границ PML. Нижняя граничная частота отсечки для
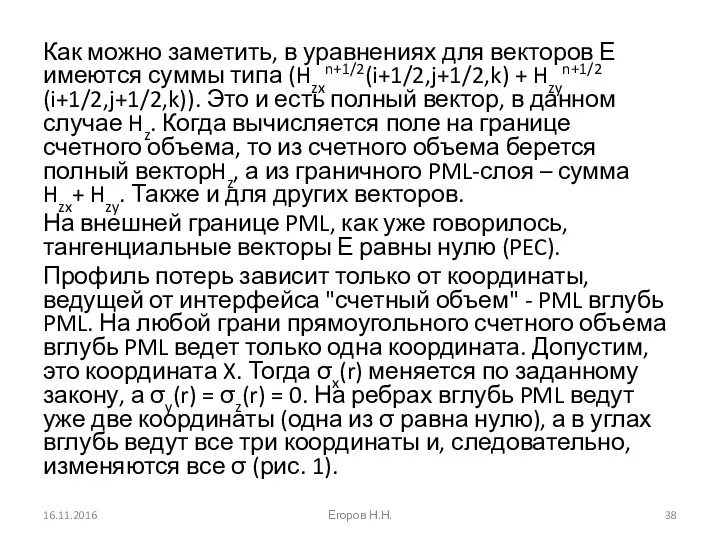
- 38. Как можно заметить, в уравнениях для векторов Е имеются суммы типа (Hzxn+1/2(i+1/2,j+1/2,k) + Hzyn+1/2 (i+1/2,j+1/2,k)). Это
- 39. Рис. 1. Счетный объем в окружении слоев PML 16.11.2016 Егоров Н.Н.
- 40. Расширения базового алгоритма Существует множество дополнений к базовому алгоритму, расширяющих его возможности. Здесь представлены два вида
- 41. Проведя вывод дискретного уравнения так, как это было во введении, но с учетом тока через сосредоточенный
- 42. Резистор Ток резистора находится по известной формуле I=U/R. В нашем случае U=∆Z(En+1+En)/2, т.е. берется среднее арифметическое
- 43. Резистивный источник напряжения Это резистор, в котором встроен источник напряжения. Очень удобный и абсолютно физичный элемент.
- 44. Конденсатор Ток через конденсатор I=C(du/dt), где С – емкость. Производную напряжения по времени выразим через разность
- 45. Индуктивность Ток в индуктивности, как известно, равен I=(1/L)∫Udt, т.е. величина интегральная. В дискретной форме ток запишем
- 46. Расширения базового алгоритма Полярные диэлектрики Наличие относительной диэлектрической проницаемости большей, чем единица, связано с поляризацией молекул
- 47. Применение метода FDTD для расчетов распространения нестационарных электромагнитных полей в условиях частотной дисперсии В классической постановке
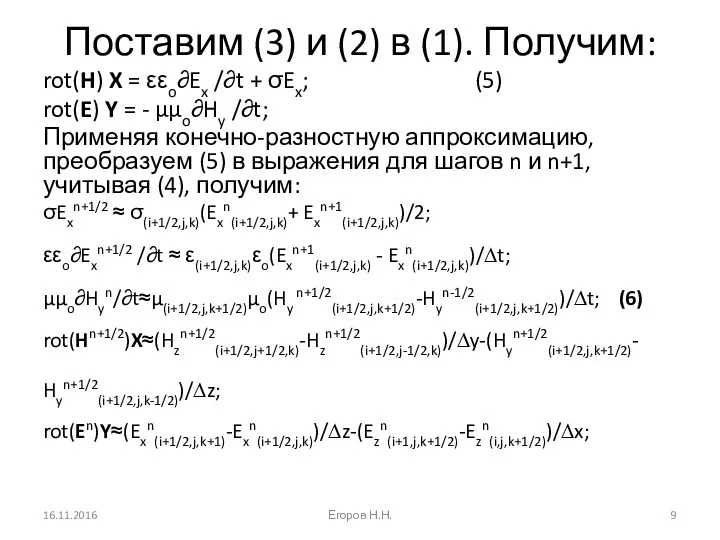
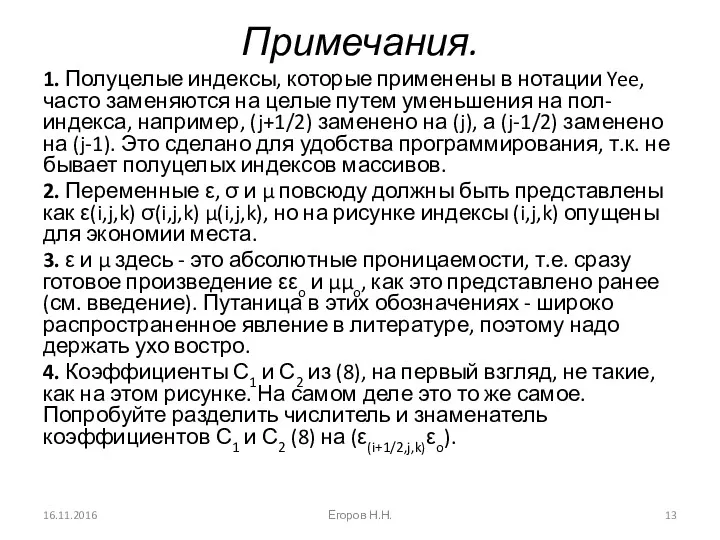
- 48. В [2] 2. Luebbers R. et all.: "A frequency-depended finite-difference time-domain formulation for dispersive materials." IEEE
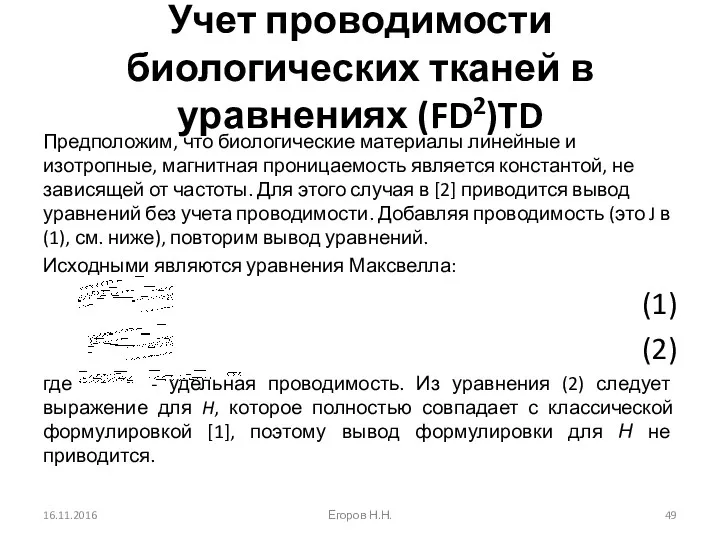
- 49. Учет проводимости биологических тканей в уравнениях (FD2)TD Предположим, что биологические материалы линейные и изотропные, магнитная проницаемость
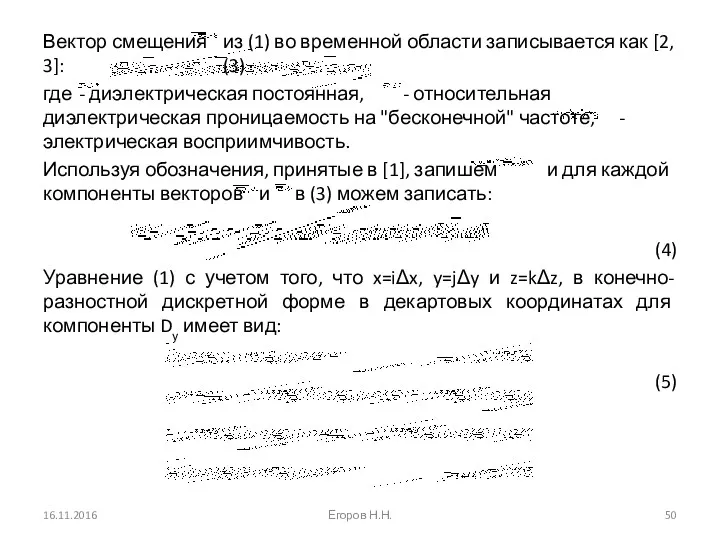
- 50. Вектор смещения из (1) во временной области записывается как [2, 3]: (3) где - диэлектрическая постоянная,
- 51. Принимая во внимание, что D(t) и E(t) равны нулю при t (6) Выражение для D на
- 52. Для удобства введем обозначения: (9) Подставляя (9) в (8) и решая последнее уравнение относительно получаем: (10)
- 53. Если относительная диэлектрическая проницаемость не зависит от частоты, то χm=0 для всех m и χ0=0. В
- 54. Выражение (10) содержит член который, на первый взгляд, для вычисления требует хранения большого количества переменных. Но,
- 55. Вычисление электромагнитного поля в дальней зоне с использованием метода FDTD и интеграла Кирхгофа Решение уравнений Максвелла
- 56. Преобразование ближнего поля в дальнее поле с использованием интеграла Кирхгофа Существует несколько методов преобразования ближнего поля
- 57. 16.11.2016 Егоров Н.Н.
- 58. Формула (6) выражает принцип Гюйгенса, согласно которому каждая точка на волновом фронте служит фиктивным источником воображаемой
- 59. Предположим, что поверхность dA’ перпендикулярна оси Z и точка p’ имеет координаты (i, j, ko) (рис.
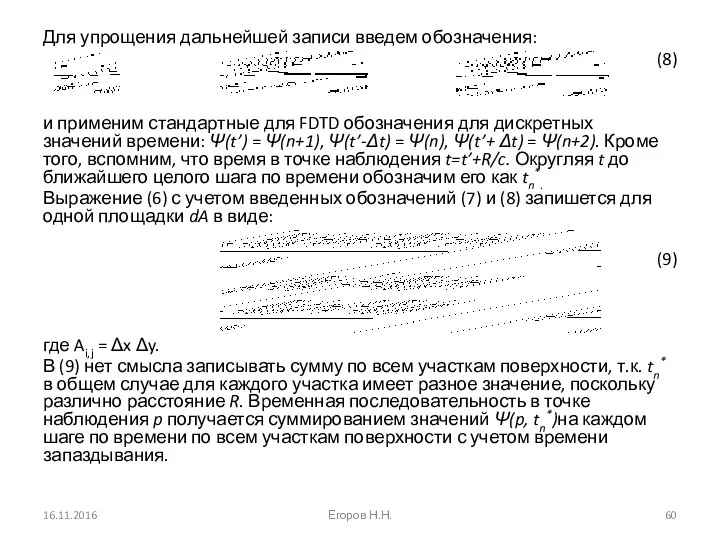
- 60. Для упрощения дальнейшей записи введем обозначения: (8) и применим стандартные для FDTD обозначения для дискретных значений
- 61. В (9) значение функции Ψ(p, tn*) вычисляется с использованием значений Ψ на трех шагах по времени.
- 63. Скачать презентацию
Введение в метод FDTD
FDTD - "finite-difference time-domain",
в русскоязычной литературе КРВО
Введение в метод FDTD
FDTD - "finite-difference time-domain",
в русскоязычной литературе КРВО
В 1966 г. Йе (Yee) разработал технику, реализующую явную конечно -
В 1966 г. Йе (Yee) разработал технику, реализующую явную конечно -
Исходными являются уравнения Максвелла в дифференциальной форме
rot(H) = ∂D/∂t + J;
Исходными являются уравнения Максвелла в дифференциальной форме
rot(H) = ∂D/∂t + J;
Для решения уравнения (1) следует выразить в декартовых координатах векторы Е
Для решения уравнения (1) следует выразить в декартовых координатах векторы Е
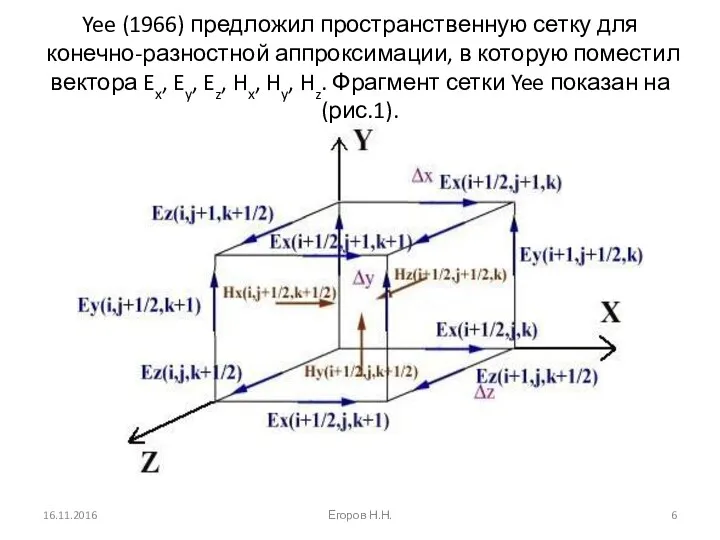
Yee (1966) предложил пространственную сетку для конечно-разностной аппроксимации, в которую поместил
Yee (1966) предложил пространственную сетку для конечно-разностной аппроксимации, в которую поместил
Все компоненты (Ex, Ey, Ez, Hx, Hy, Hz) находятся в разных
Все компоненты (Ex, Ey, Ez, Hx, Hy, Hz) находятся в разных
Поля E и H вычисляются со сдвигом на полшага по времени.
Поля E и H вычисляются со сдвигом на полшага по времени.
Поставим (3) и (2) в (1). Получим:
rot(H) X = εεo∂Ex /∂t
Поставим (3) и (2) в (1). Получим:
rot(H) X = εεo∂Ex /∂t
Подставляя (6) в (5) и решая получившиеся выражения относительно Hyn+1/2(i+1/2,j,k+1/2) и
Подставляя (6) в (5) и решая получившиеся выражения относительно Hyn+1/2(i+1/2,j,k+1/2) и
16.11.2016
Егоров Н.Н.
16.11.2016
Егоров Н.Н.
Базовый алгоритм FDTD
Выше кратко описан вывод конечно-разностных уравнений в декартовых координатах
Базовый алгоритм FDTD
Выше кратко описан вывод конечно-разностных уравнений в декартовых координатах
Примечания.
1. Полуцелые индексы, которые применены в нотации Yee, часто заменяются на
Примечания.
1. Полуцелые индексы, которые применены в нотации Yee, часто заменяются на
Шесть уравнений базового алгоритма очень просты в реализации. Для этого необходимо
Шесть уравнений базового алгоритма очень просты в реализации. Для этого необходимо
Вычисление полей Е и Н ведется рекурсивно: для вычисления значений на
Вычисление полей Е и Н ведется рекурсивно: для вычисления значений на
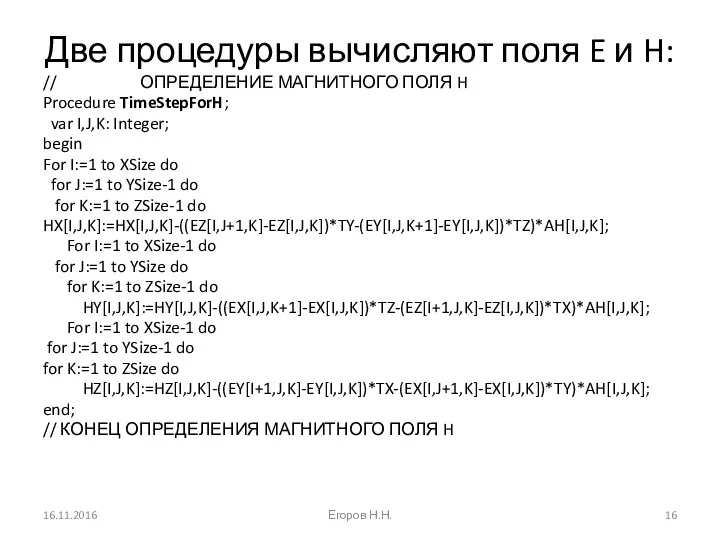
Две процедуры вычисляют поля E и H:
// ОПРЕДЕЛЕНИЕ МАГНИТНОГО ПОЛЯ H
Procedure
Две процедуры вычисляют поля E и H:
// ОПРЕДЕЛЕНИЕ МАГНИТНОГО ПОЛЯ H
Procedure
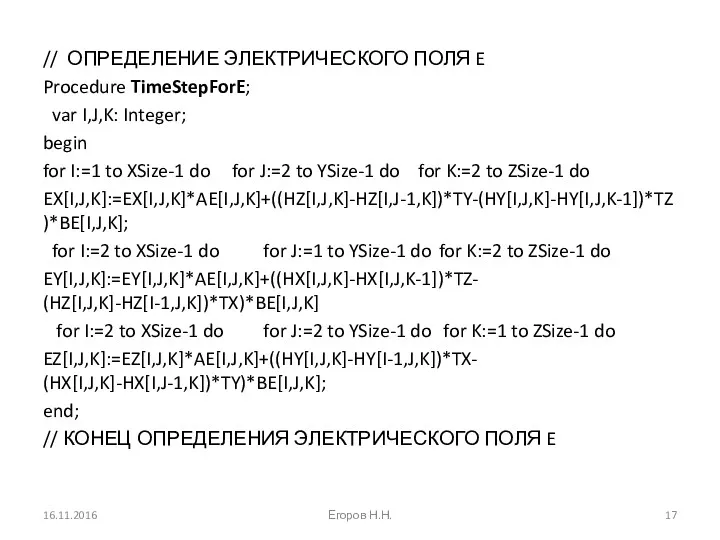
// ОПРЕДЕЛЕНИЕ ЭЛЕКТРИЧЕСКОГО ПОЛЯ E
Procedure TimeStepForE;
var I,J,K: Integer;
begin
for I:=1 to
// ОПРЕДЕЛЕНИЕ ЭЛЕКТРИЧЕСКОГО ПОЛЯ E
Procedure TimeStepForE;
var I,J,K: Integer;
begin
for I:=1 to
![Массивы AE[I,J,K], BE[I,J,K] и AН[I,J,K] - это предварительно вычисленные коэффициенты](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/308486/slide-17.jpg)
Массивы AE[I,J,K], BE[I,J,K] и AН[I,J,K] - это предварительно вычисленные коэффициенты С1,
Массивы AE[I,J,K], BE[I,J,K] и AН[I,J,K] - это предварительно вычисленные коэффициенты С1,
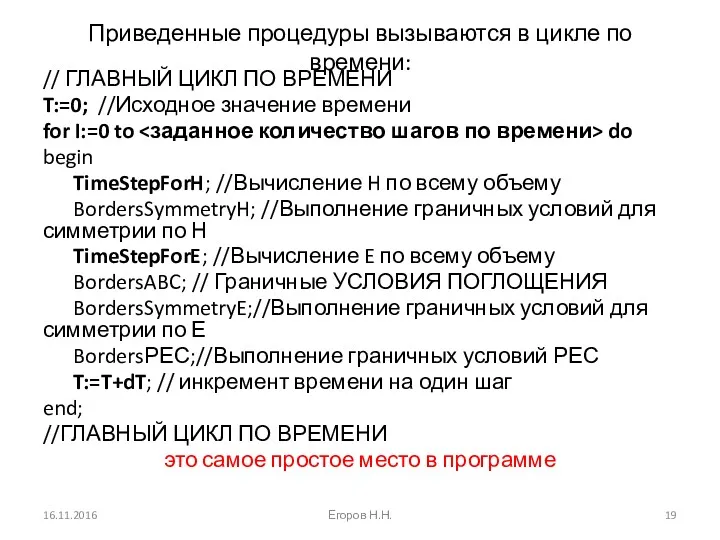
Приведенные процедуры вызываются в цикле по времени:
// ГЛАВНЫЙ ЦИКЛ ПО ВРЕМЕНИ
T:=0;
Приведенные процедуры вызываются в цикле по времени:
// ГЛАВНЫЙ ЦИКЛ ПО ВРЕМЕНИ
T:=0;
Граничные условия для FDTD
В счетном объеме каждый вектор Е или Н
Граничные условия для FDTD
В счетном объеме каждый вектор Е или Н
2. Условия симметрии.
В некоторых случаях поле Е или поле Н может
2. Условия симметрии.
В некоторых случаях поле Е или поле Н может
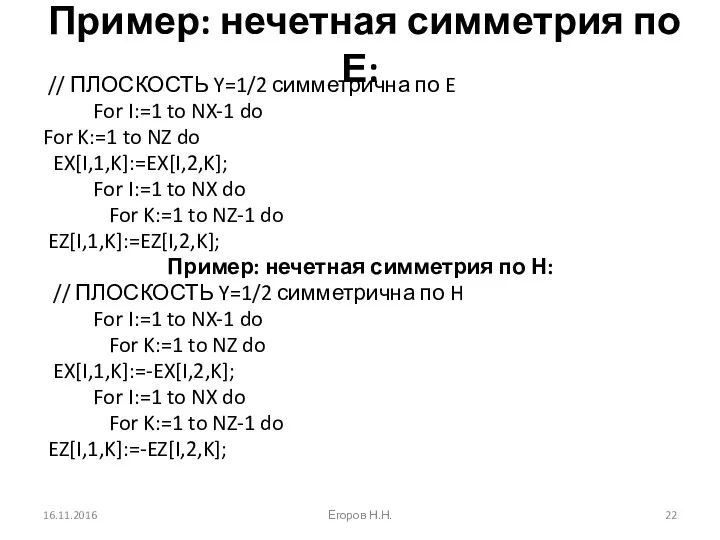
Пример: нечетная симметрия по Е:
// ПЛОСКОСТЬ Y=1/2 симметрична по E
Пример: нечетная симметрия по Е:
// ПЛОСКОСТЬ Y=1/2 симметрична по E
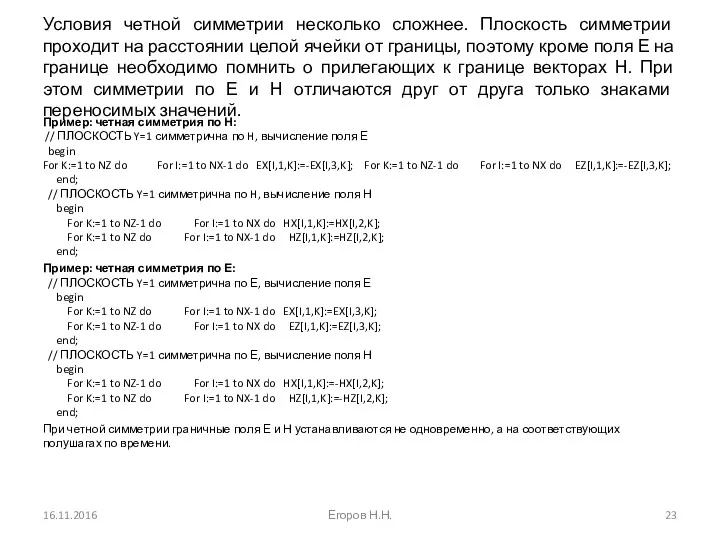
Условия четной симметрии несколько сложнее. Плоскость симметрии проходит на расстоянии целой
Условия четной симметрии несколько сложнее. Плоскость симметрии проходит на расстоянии целой
Простые условия поглощения (АВС)
Для условий поглощения значения векторов электрического поля на
Простые условия поглощения (АВС)
Для условий поглощения значения векторов электрического поля на
Итак, граничных условий много. Здесь рассмотрим три варианта простейших граничных условий:
Итак, граничных условий много. Здесь рассмотрим три варианта простейших граничных условий:
16.11.2016
Егоров Н.Н.
16.11.2016
Егоров Н.Н.
Видно, что больше всего массивов переменных нужно хранить для условий RT
Видно, что больше всего массивов переменных нужно хранить для условий RT
//ВЕРХНЯЯ И НИЖНЯЯ ПЛОСКОСТИ
// Ex для двух плоскостей XxZ [верхней
//ВЕРХНЯЯ И НИЖНЯЯ ПЛОСКОСТИ
// Ex для двух плоскостей XxZ [верхней
![// Ex для двух плоскостей XxY [ближней и дальней] for](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/308486/slide-28.jpg)
// Ex для двух плоскостей XxY [ближней и дальней]
for I:=1
// Ex для двух плоскостей XxY [ближней и дальней]
for I:=1
// сохранение приграничных полей для MursFirstABC
Procedure GetBorderValues;
var I,J,K: Integer;
begin
//
// сохранение приграничных полей для MursFirstABC
Procedure GetBorderValues;
var I,J,K: Integer;
begin
//
4. Условия PМL - идеально сочетающиеся слои
"Perfectly Matched Layer" выглядит как
4. Условия PМL - идеально сочетающиеся слои
"Perfectly Matched Layer" выглядит как
Во-первых, в уравнения в обязательном порядке вводятся электрические и магнитные потери.
Во-первых, в уравнения в обязательном порядке вводятся электрические и магнитные потери.
(11)
16.11.2016
Егоров Н.Н.
(11)
16.11.2016
Егоров Н.Н.
Примечание
Схему Беренгера называют «раздельной», т.к. вводится разделение векторов. Есть также предложения
Примечание
Схему Беренгера называют «раздельной», т.к. вводится разделение векторов. Есть также предложения
В третьих, теоретически, если выполняется условие
σi/ εo = σi*/ μo, (12)
то на
В третьих, теоретически, если выполняется условие
σi/ εo = σi*/ μo, (12)
то на
Отражение от PEC границы после последнего слоя PML происходит обычно уже
Отражение от PEC границы после последнего слоя PML происходит обычно уже
На низких частотах наблюдается резкое увеличение коэффициента отражения от границ PML.
На низких частотах наблюдается резкое увеличение коэффициента отражения от границ PML.
Как можно заметить, в уравнениях для векторов Е имеются суммы типа
Как можно заметить, в уравнениях для векторов Е имеются суммы типа
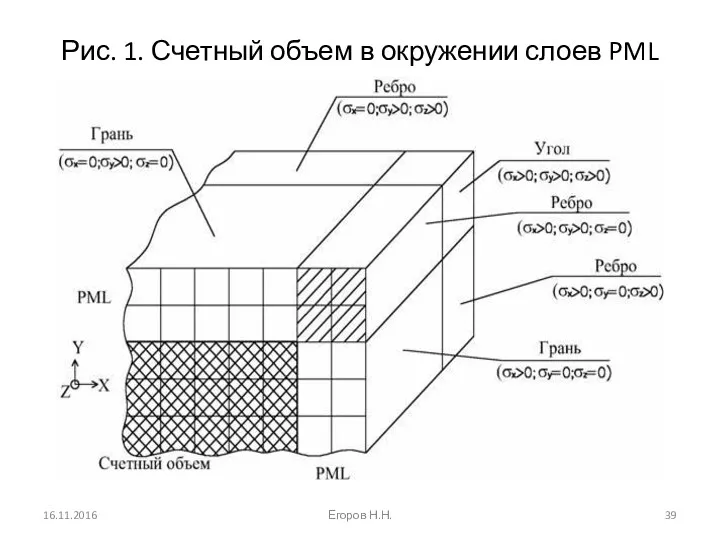
Рис. 1. Счетный объем в окружении слоев PML
16.11.2016
Егоров Н.Н.
Рис. 1. Счетный объем в окружении слоев PML
16.11.2016
Егоров Н.Н.
Расширения базового алгоритма
Существует множество дополнений к базовому алгоритму, расширяющих его возможности.
Здесь
Расширения базового алгоритма
Существует множество дополнений к базовому алгоритму, расширяющих его возможности.
Здесь
Проведя вывод дискретного уравнения так, как это было во введении, но
Проведя вывод дискретного уравнения так, как это было во введении, но
Резистор
Ток резистора находится по известной формуле I=U/R. В нашем случае U=∆Z(En+1+En)/2,
Резистор
Ток резистора находится по известной формуле I=U/R. В нашем случае U=∆Z(En+1+En)/2,
Резистивный источник напряжения
Это резистор, в котором встроен источник напряжения. Очень удобный
Резистивный источник напряжения
Это резистор, в котором встроен источник напряжения. Очень удобный
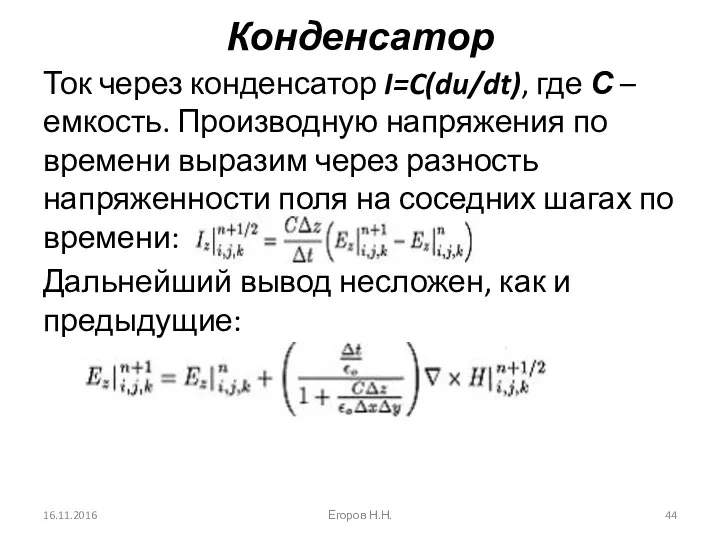
Конденсатор
Ток через конденсатор I=C(du/dt), где С – емкость. Производную напряжения по
Конденсатор
Ток через конденсатор I=C(du/dt), где С – емкость. Производную напряжения по
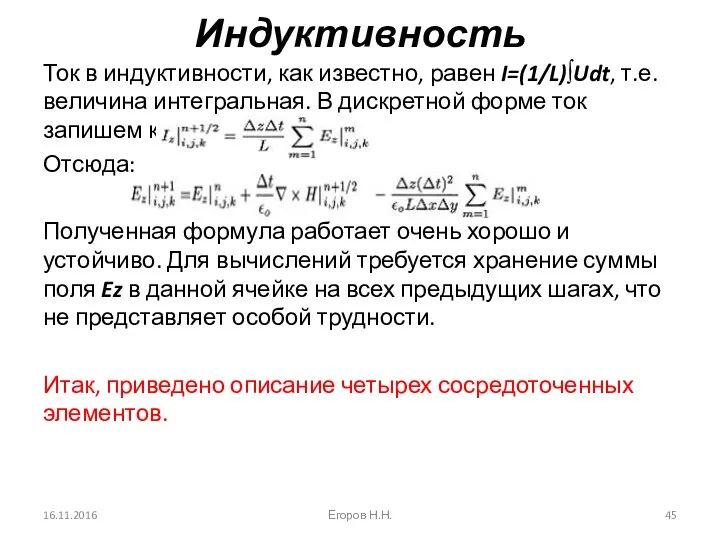
Индуктивность
Ток в индуктивности, как известно, равен I=(1/L)∫Udt, т.е. величина интегральная. В
Индуктивность
Ток в индуктивности, как известно, равен I=(1/L)∫Udt, т.е. величина интегральная. В
Расширения базового алгоритма
Полярные диэлектрики
Наличие относительной диэлектрической проницаемости большей, чем единица, связано
Расширения базового алгоритма
Полярные диэлектрики
Наличие относительной диэлектрической проницаемости большей, чем единица, связано
Применение метода FDTD для расчетов распространения нестационарных электромагнитных полей в условиях
Применение метода FDTD для расчетов распространения нестационарных электромагнитных полей в условиях
![В [2] 2. Luebbers R. et all.: "A frequency-depended finite-difference](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/308486/slide-47.jpg)
В [2]
2. Luebbers R. et all.: "A frequency-depended finite-difference time-domain
В [2]
2. Luebbers R. et all.: "A frequency-depended finite-difference time-domain
Учет проводимости биологических тканей в уравнениях (FD2)TD
Предположим, что биологические материалы линейные
Учет проводимости биологических тканей в уравнениях (FD2)TD
Предположим, что биологические материалы линейные
Вектор смещения из (1) во временной области записывается как [2, 3]: (3)
где
Вектор смещения из (1) во временной области записывается как [2, 3]: (3)
где
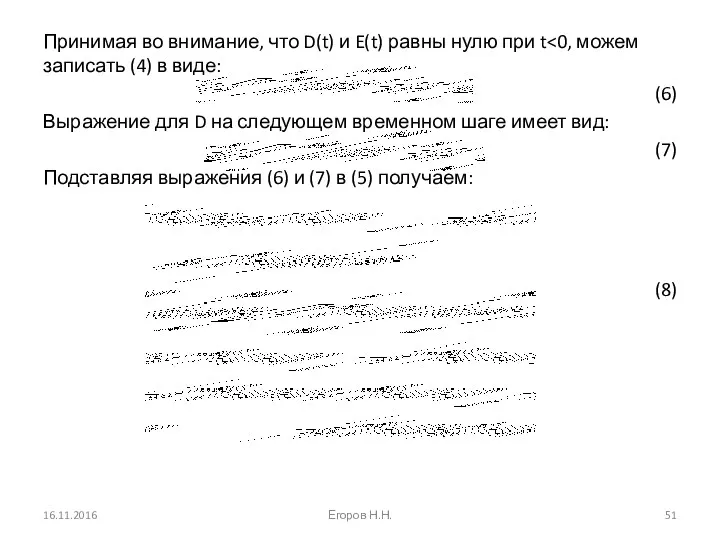
Принимая во внимание, что D(t) и E(t) равны нулю при t<0,
Принимая во внимание, что D(t) и E(t) равны нулю при t<0,
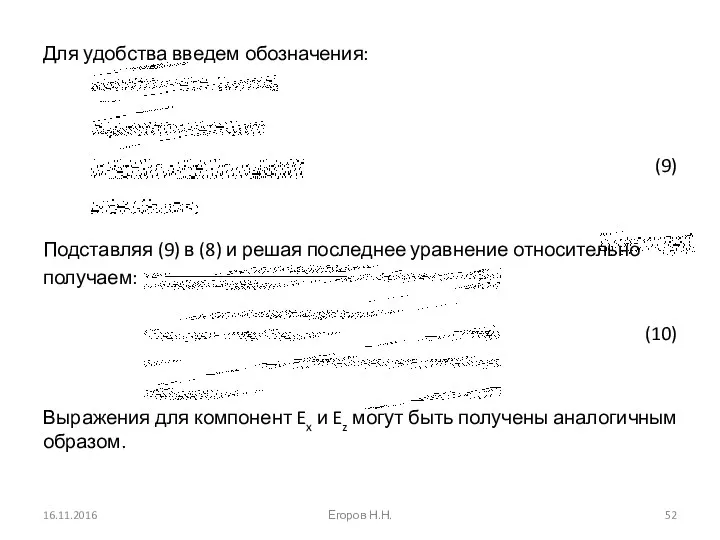
Для удобства введем обозначения:
(9)
Подставляя (9) в (8) и решая последнее уравнение
Для удобства введем обозначения:
(9)
Подставляя (9) в (8) и решая последнее уравнение
Если относительная диэлектрическая проницаемость не зависит от частоты, то χm=0 для
Если относительная диэлектрическая проницаемость не зависит от частоты, то χm=0 для
Выражение (10) содержит член
который, на первый взгляд, для вычисления требует хранения
Выражение (10) содержит член
который, на первый взгляд, для вычисления требует хранения
Вычисление электромагнитного поля в дальней зоне с использованием метода FDTD и
Вычисление электромагнитного поля в дальней зоне с использованием метода FDTD и
Преобразование ближнего поля в дальнее поле с использованием интеграла Кирхгофа
Существует несколько
Преобразование ближнего поля в дальнее поле с использованием интеграла Кирхгофа
Существует несколько
16.11.2016
Егоров Н.Н.
16.11.2016
Егоров Н.Н.
Формула (6) выражает принцип Гюйгенса, согласно которому каждая точка на волновом
Формула (6) выражает принцип Гюйгенса, согласно которому каждая точка на волновом
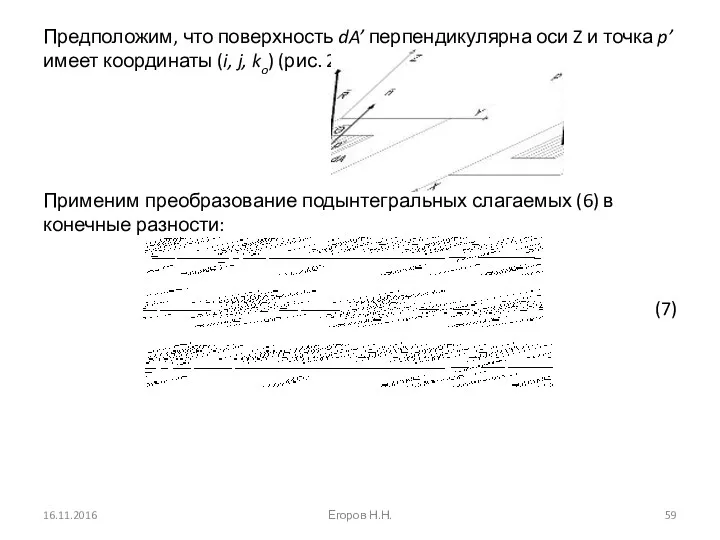
Предположим, что поверхность dA’ перпендикулярна оси Z и точка p’ имеет
Предположим, что поверхность dA’ перпендикулярна оси Z и точка p’ имеет
Для упрощения дальнейшей записи введем обозначения:
(8)
и применим стандартные для FDTD обозначения
Для упрощения дальнейшей записи введем обозначения:
(8)
и применим стандартные для FDTD обозначения
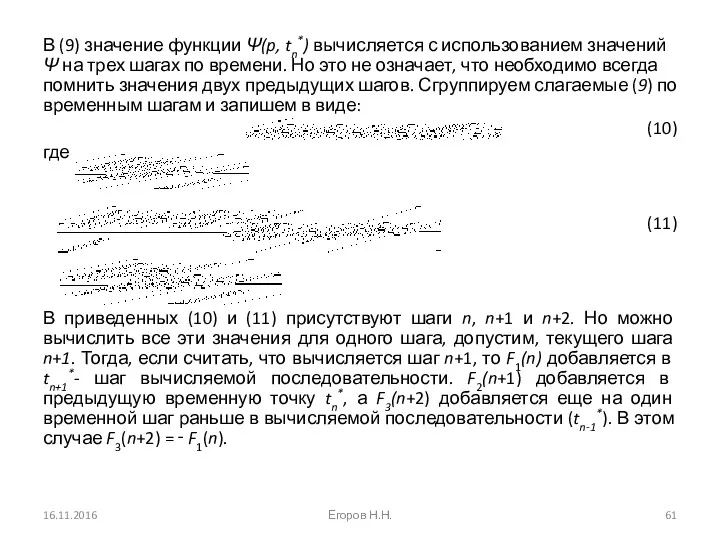
В (9) значение функции Ψ(p, tn*) вычисляется с использованием значений Ψ
В (9) значение функции Ψ(p, tn*) вычисляется с использованием значений Ψ
 Презентация по физике Оптические иллюзии
Презентация по физике Оптические иллюзии Презентация к уроку физики в 7 классе Центр тяжести тела
Презентация к уроку физики в 7 классе Центр тяжести тела Управление автомобилем
Управление автомобилем Зануление
Зануление Динамика материальной точки и поступательного движения твердого тела
Динамика материальной точки и поступательного движения твердого тела Лампочка. История изобретения
Лампочка. История изобретения Действия электрического тока
Действия электрического тока Основные положения сопротивления материалов
Основные положения сопротивления материалов Механическое движение.
Механическое движение. Двигатели внутреннего сгорания
Двигатели внутреннего сгорания Лекція 5. Плівки Ленгмюра – Блоджетт. Нанокластери
Лекція 5. Плівки Ленгмюра – Блоджетт. Нанокластери Механическая работа
Механическая работа Применение кейс – метода на уроках физики
Применение кейс – метода на уроках физики Компания Daimler-Motoren-Gesellschaft (DMG)
Компания Daimler-Motoren-Gesellschaft (DMG) Электростатика. Электризация полезная и вредная
Электростатика. Электризация полезная и вредная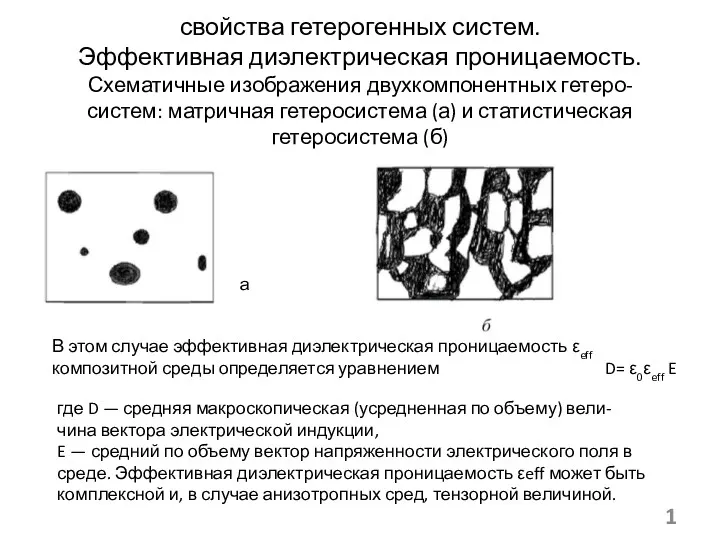 Свойства гетерогенных систем. Эффективная диэлектрическая проницаемость
Свойства гетерогенных систем. Эффективная диэлектрическая проницаемость Давление в жидкости и газе. Закон Паскаля
Давление в жидкости и газе. Закон Паскаля Типы атомных электростанций
Типы атомных электростанций Теплопроводность при наличии внутренних источников теплоты
Теплопроводность при наличии внутренних источников теплоты 20240125_ya_i_moy_nastavnik_2_
20240125_ya_i_moy_nastavnik_2_ Учебные презентации по физике по темам Электромагнитные волны и Строение атома
Учебные презентации по физике по темам Электромагнитные волны и Строение атома Fuel supply system DC9 EDC MS5
Fuel supply system DC9 EDC MS5 Система работы учителя по подготовке учащихся к итоговой аттестации по физике
Система работы учителя по подготовке учащихся к итоговой аттестации по физике Ядерный реактор. Ядерная энергетика.
Ядерный реактор. Ядерная энергетика. Презентация Линзы
Презентация Линзы Расчёт погрешностей результатов экспериментов
Расчёт погрешностей результатов экспериментов Электрические заряды. Закон сохранения электрического заряда. Закон Кулона. Напряженность поля
Электрические заряды. Закон сохранения электрического заряда. Закон Кулона. Напряженность поля Обобщающий урок-сказка по теме Первоначальные сведения о строении вещества
Обобщающий урок-сказка по теме Первоначальные сведения о строении вещества