- Асинхронный двигатель

Содержание
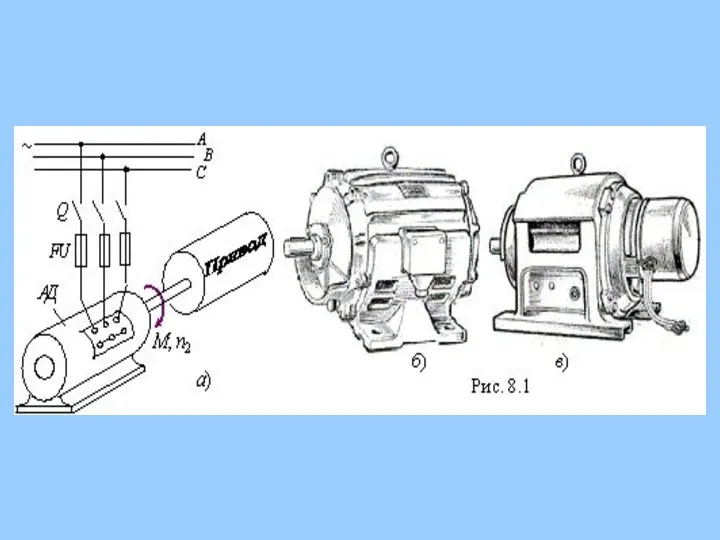
- 2. Двухфазный асинхронный электродвигатель был изобретен Н. Тесла (1887) В 1889 М. О. Доливо-Добровольский сконструировал и испытал
- 3. 1 – вал; 2 – подшипниковый щит; 3 – подшипник; 4 – прокладка; 5 –лопасти 6
- 4. Обмотка статора Магнито-провод статора Станина Вал ротора Передний подшипниковый щит Короткозамкнутая обмотка ротора Задний подшипник Крыльчатка
- 5. Ребра охлаждения Установочные лапы Передний подшипник Вал ротора Обмотка статора Клеммы Клеммная коробка Сердечник статора Сердечник
- 6. 1 – крышка; 2 – подшипниковый щит; 3 – подшипник; 4 – прокладка; 5 – лопасти;
- 7. Корпус Сердечник статора Сердечник ротора Контактные кольца Щеткодержатель Клеммный щиток Асинхронный двигатель с фазным ротором
- 8. АД с КЗ ротором (обмотки статора соединены звездой) АД с фазным ротором (обмотки статора и ротора
- 9. Клеммная коробка Корпус двигателя Обмотка статора Сердечник статора Лист магнитопровода статора Лист магнитопровода ротора Статор асинхронного
- 10. АД подключаются к трехфазной электрической сети Клеммная колодка позволяет подключать обмотки статора к трехфазной сети. На
- 11. Схемы соединения обмоток статора
- 13. 1- магнитопровод ротора; 2 – короткозамкнутые кольца; 3 – стержни (обмотка) ротора; 4 – вентиляционные лопасти
- 14. Устройство фазного ротора а Вал Сердечник ротора Обмотка ротора Контактные кольца Фазный ротор асинхронного двигателя
- 15. 1 – магнитопровод статора; 2 – обмотка статора; 3 – корпус; 4 – магнитопровод ротора; 5
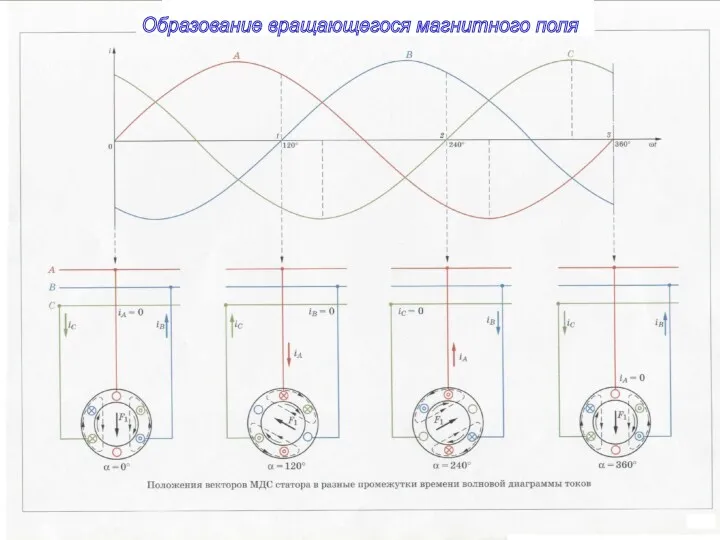
- 16. n0 = 1/ Т, об/сек = 60f / p, об/ мин – частота вращения магнитного поля
- 17. Образование вращающегося магнитного поля
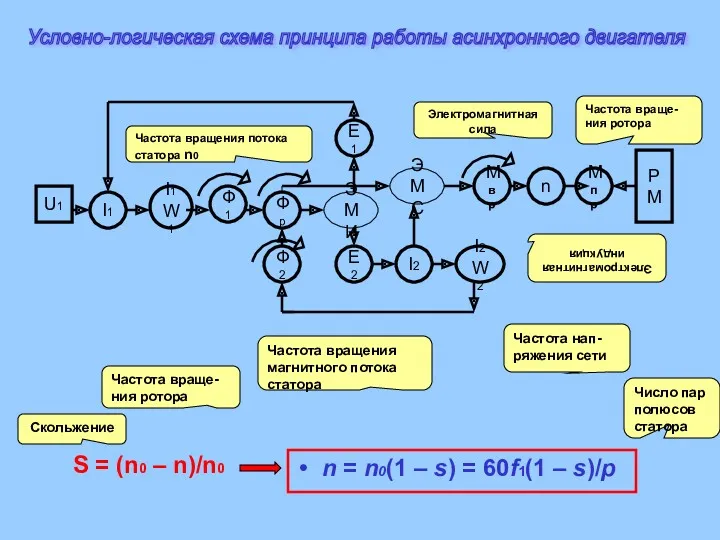
- 18. U1 I1 I1W1 Ф1 Фр Ф2 Е2 Е1 I2W2 I2 Мвр Мпр n ЭМИ ЭМС РМ
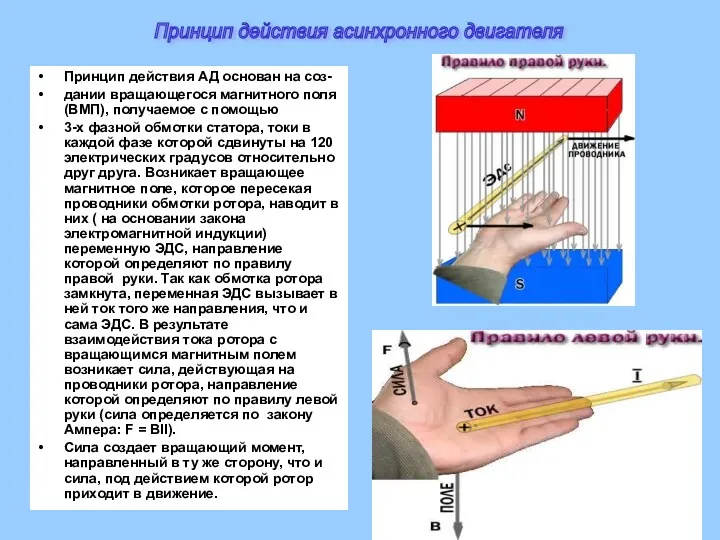
- 19. Принцип действия АД основан на соз- дании вращающегося магнитного поля (ВМП), получаемое с помощью 3-х фазной
- 20. Частота вращения ротора, об/мин Частота вращения магнитного поля статора (синхронная частота), об/мин s→0 – минимальное отставание
- 21. Частота пересечения проводников обмотки ротора магнитным потоком статора: 50 Гц Изменение параметров ротора при его вращении
- 22. ЭДС обмотки вращающегося ротора: Е2s = 4,44f2sw2Kоб2Фm = sЕ2, где Е2 = 4,44f2w2Kоб2Фm – ЭДС неподвижного
- 23. Р1 Рэм Рмех Р2 Р1 -потребляемая мощность Рэм - электромаг- нитная мощность - меха- ническая мощность
- 24. ΔРоб.2 = Рэм – Рмех = = МΩ1 – МΩ2 = = М(Ω1–Ω2)(Ω1/Ω1)=МΩ1S М = ΔРоб.2/
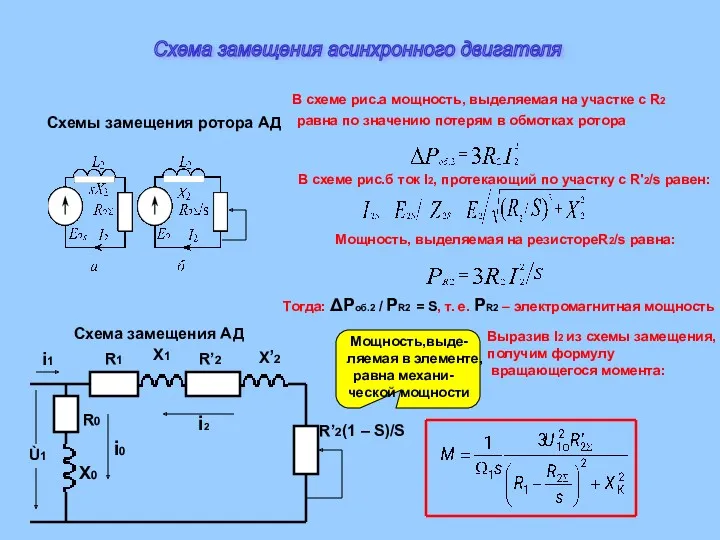
- 25. В схеме рис.а мощность, выделяемая на участке с R2 равна по значению потерям в обмотках ротора
- 26. Рассмотрим работу АД при условии: U1=const. Введем С’м= 3 /Ω1= const пренебрегая R1, получим: Взяв, dM/ds
- 27. n = n0(1–s) Механическая характеристика асинхронного двигателя n = f(M)
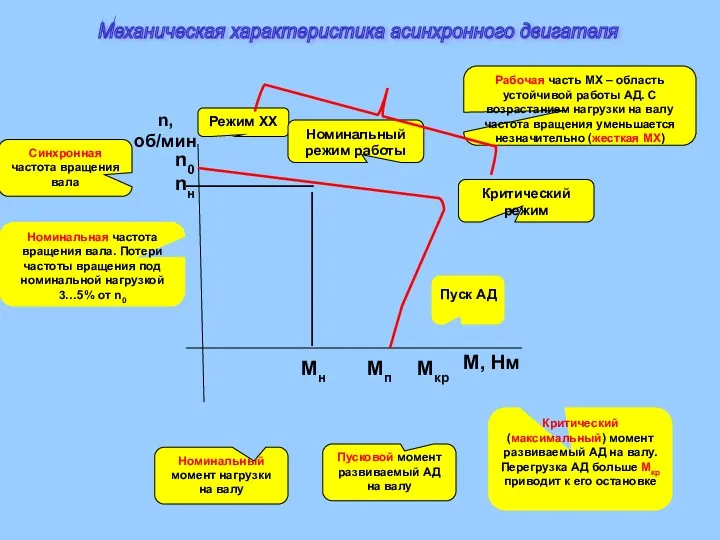
- 28. n0 n, об/мин nн Мн Мп Мкр М, Нм Номинальная частота вращения вала. Потери частоты вращения
- 29. Паспортными данными электродвигателей являются следующие величины: Рном – номинальная мощность, кВт; nном – номинальная частота вращения
- 30. Рабочие характеристики асинхронного двигателя
- 31. Пуск АД сопровождается скачком тока до Iп, который в 5-7 раз превышает номинальный ток Iн, на
- 32. 1. Пуск при пониженном напряжении а) включение последовательно с обмотками статора реостатов или индуктивностей б) соединение
- 33. 2. Пуск с помощью пускового реостата в цепи обмотки ротора (только для АД с фазным ротором)
- 34. 1. Изменением количества полюсов статора – включением в сеть разного количества полюсов. Существуют многоскоростные АД: двухскоростные:
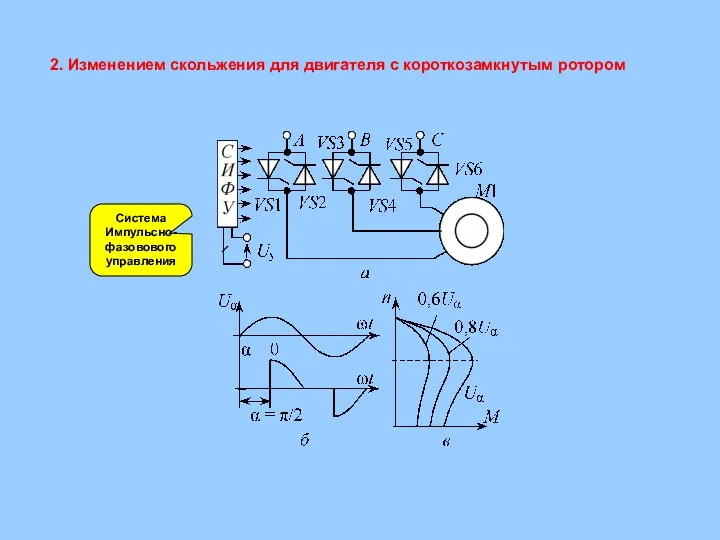
- 35. Система Импульсно-фазовового управления 2. Изменением скольжения для двигателя с короткозамкнутым ротором
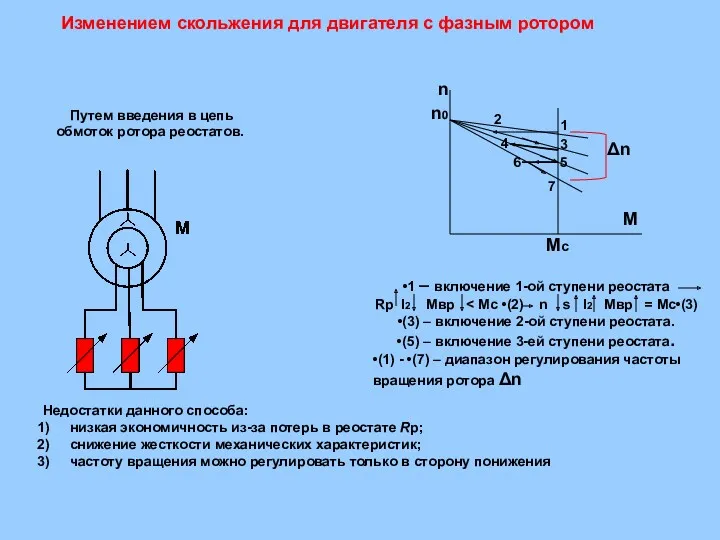
- 36. 1 2 3 4 5 6 7 n n0 M Mc Путем введения в цепь обмоток
- 37. 3.Частотное регулирование М, Нм n, об/мин fпч=50Гц fпч =35Гц fпч =25Гц fсети=50Гц fпч Уменьшение только частоты
- 38. Продолжение частотного регулирования Изменение частоты по закону: позволяет регулировать частоту вращения без изменение момента Для механизмов:
- 39. Блок управления частотой Блок управления частотой Автоматический Инвертор напряжения Блок управления напряжением Управляемый выпрямитель Блок управления
- 40. Схема трехфазного АИН на запираемых тиристорах VS1–VS6. Пусть f1Т = = 1/Т1Т – требуемая частота напряжения
- 41. Этот вид торможения наблюдается в частотно-управляемых двигателях при понижении частоты f1, а также в многоскоростных двигателях
- 42. Торможение противключением достигается изменением направления вращения поля статора. При этом характеристика Е1 заменяется обращенной характеристикой Е2.
- 43. Осуществляют отключением обмоток статора от трехфазной сети и подключением к источнику постоянного напряжения U0 (рисунок а).
- 44. АД выпускаются с синхронной частотой вращения n0 (частотой вращения магнитного поля статора): 3000, 1500, 1000, 750,
- 45. Pпотр – потребляемая электрическая мощность от источника, Вт Pпотерь – потери электрической мощности, Вт Pполезн (или
- 46. М = СМФmахI2cosϕ2, Частота вращения магнитного потока статора Частота напря-жения сети Число пар полюсов об- мотки
- 47. Достоинства и недостатки асинхронных двигателей
- 48. Консольный центробежный насос для сточных масс Электронасосы моноблочные центробежные циркуляционные для воды Пылевой вентилятор Центробежный многосек-
- 49. Станция перекачки нефти ЛПДС "Мозырь" Гомельского предприятия транспорта нефти "Дружба"
- 50. Задачи
- 51. Задание
- 52. Однофазный двигатель Обмотка ротора Обмотка статора u ~
- 53. На статоре однофазного АД располагается одна обмотка. Ротор имеет короткозамкнутую обмотку. Протекающий по обмотке статора переменный
- 54. Ф Ф Если пульсирующий поток изменяется по закону Ф = Фмахcosωt, то при t =0 поток
- 55. Скольжение по отношению к прямому потоку s1 = (n1 – n2)/n1, а n2 = n1(1-s). Скольжение
- 56. Для пуска однофазного АД применяют специальную пусковую обмотку (ПО), располагаемую на статоре под углом 90° к
- 57. Двигатель трогается с места и разгоняется в соответствии с зависимостью М'(s). Разгон двигателя заканчивается в точек
- 58. Однофазные асинхронные двигатели нашли применение в: – системах автоматического управления; – бытовых приборах; – промышленных устройствах.
- 60. Скачать презентацию

Двухфазный асинхронный электродвигатель
был изобретен Н. Тесла (1887)
В 1889 М. О.
Двухфазный асинхронный электродвигатель
был изобретен Н. Тесла (1887)
В 1889 М. О.

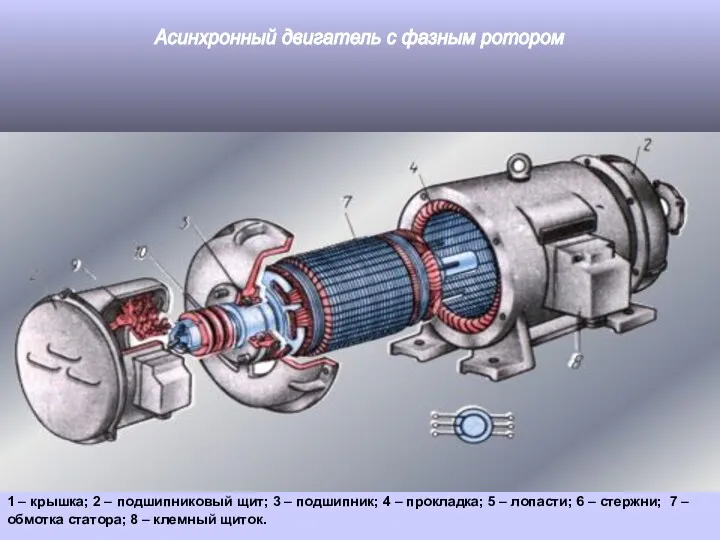
1 – вал; 2 – подшипниковый щит; 3 – подшипник;
1 – вал; 2 – подшипниковый щит; 3 – подшипник;
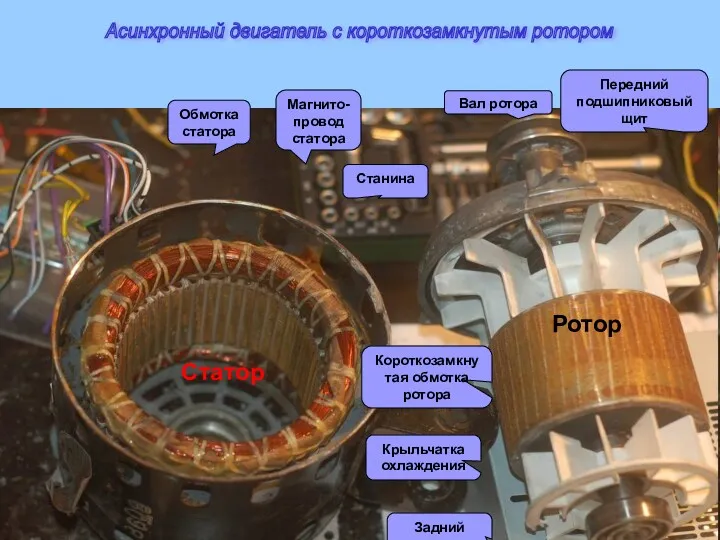
Обмотка статора
Магнито-провод статора
Станина
Вал ротора
Передний подшипниковый щит
Короткозамкнутая обмотка ротора
Задний подшипник
Крыльчатка охлаждения
Статор
Ротор
Асинхронный двигатель
Обмотка статора
Магнито-провод статора
Станина
Вал ротора
Передний подшипниковый щит
Короткозамкнутая обмотка ротора
Задний подшипник
Крыльчатка охлаждения
Статор
Ротор
Асинхронный двигатель
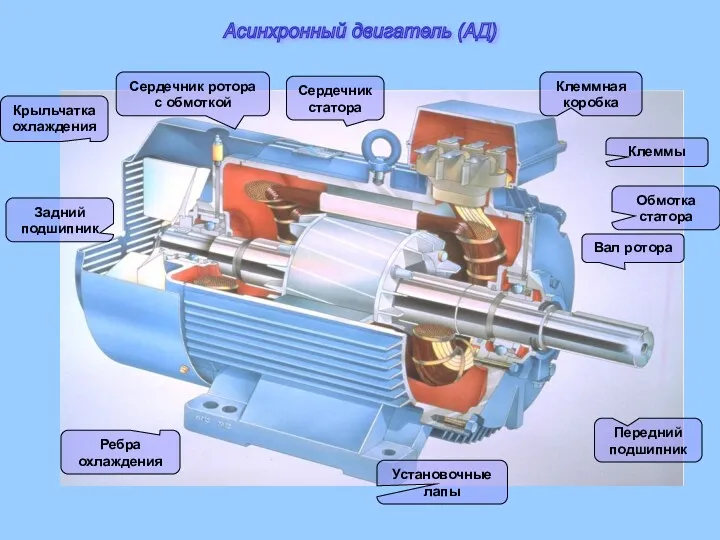
Ребра охлаждения
Установочные лапы
Передний подшипник
Вал ротора
Обмотка статора
Клеммы
Клеммная коробка
Сердечник статора
Сердечник ротора с обмоткой
Крыльчатка
Ребра охлаждения
Установочные лапы
Передний подшипник
Вал ротора
Обмотка статора
Клеммы
Клеммная коробка
Сердечник статора
Сердечник ротора с обмоткой
Крыльчатка
1 – крышка; 2 – подшипниковый щит; 3 – подшипник; 4
1 – крышка; 2 – подшипниковый щит; 3 – подшипник; 4
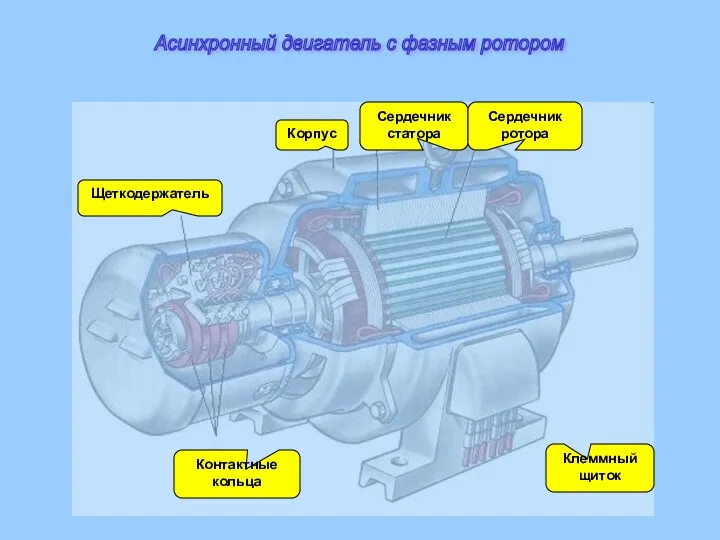
Корпус
Сердечник
статора
Сердечник
ротора
Контактные
кольца
Щеткодержатель
Клеммный
щиток
Асинхронный двигатель с фазным ротором
Корпус
Сердечник
статора
Сердечник
ротора
Контактные
кольца
Щеткодержатель
Клеммный
щиток
Асинхронный двигатель с фазным ротором
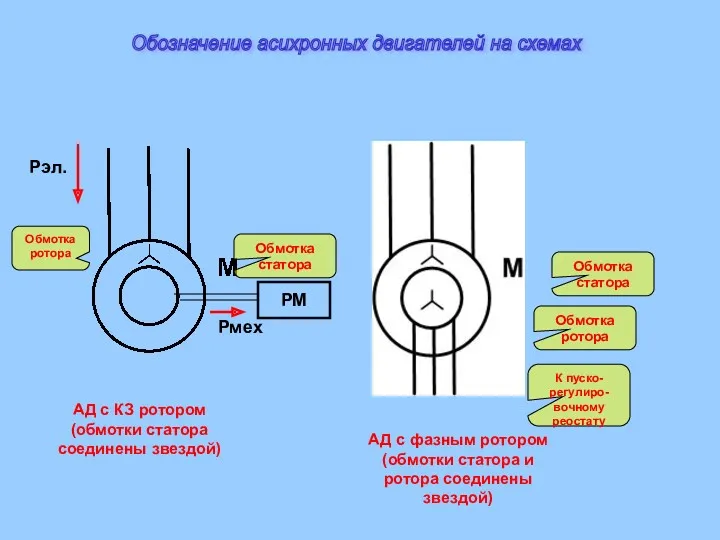
АД с КЗ ротором
(обмотки статора соединены звездой)
АД с фазным ротором
(обмотки статора
АД с КЗ ротором
(обмотки статора соединены звездой)
АД с фазным ротором
(обмотки статора
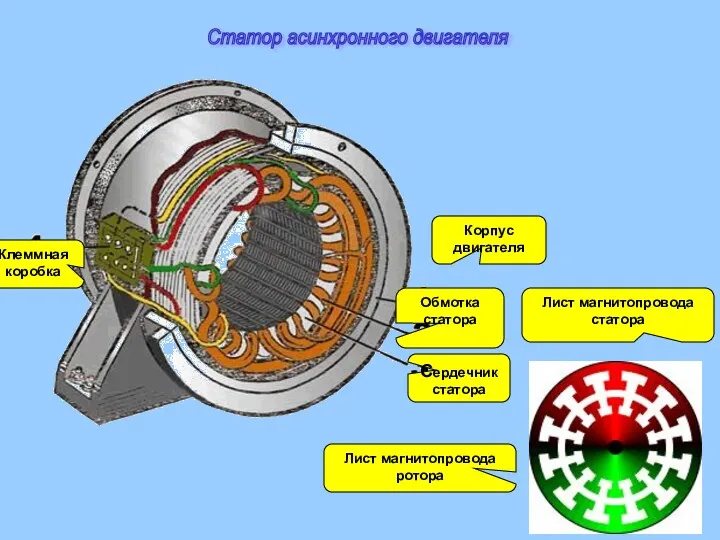
Клеммная коробка
Корпус двигателя
Обмотка статора
Сердечник статора
Лист магнитопровода статора
Лист магнитопровода ротора
Статор асинхронного двигателя
Клеммная коробка
Корпус двигателя
Обмотка статора
Сердечник статора
Лист магнитопровода статора
Лист магнитопровода ротора
Статор асинхронного двигателя
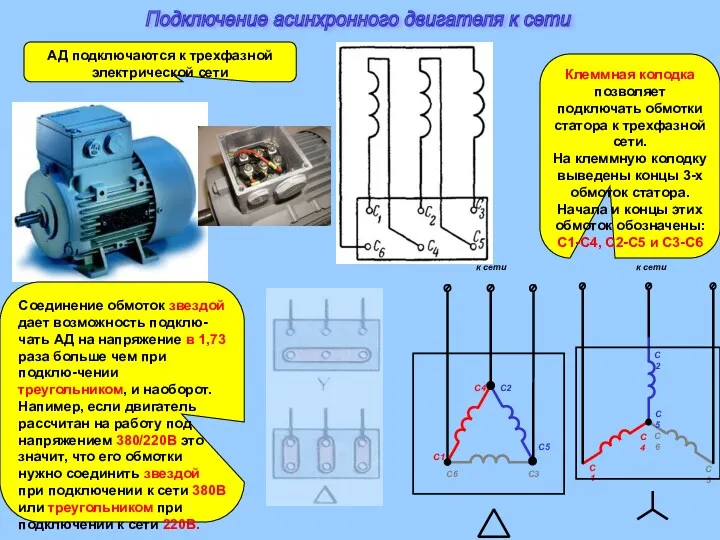
АД подключаются к трехфазной электрической сети
Клеммная колодка позволяет подключать обмотки статора
АД подключаются к трехфазной электрической сети
Клеммная колодка позволяет подключать обмотки статора
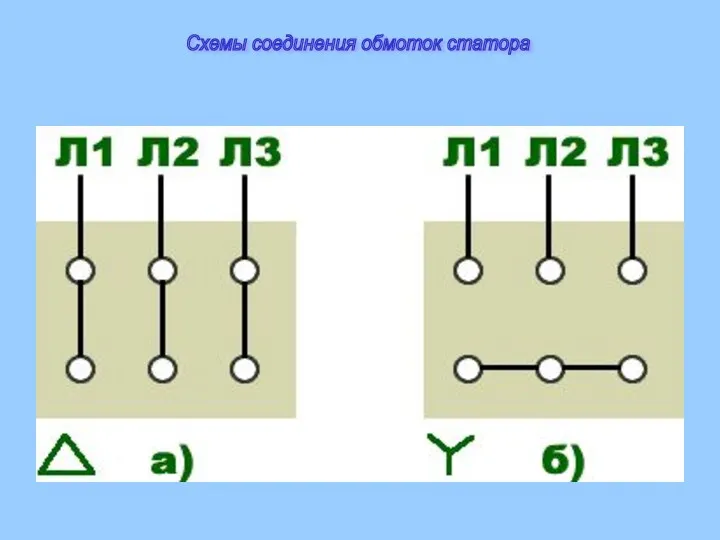
Схемы соединения обмоток статора
Схемы соединения обмоток статора
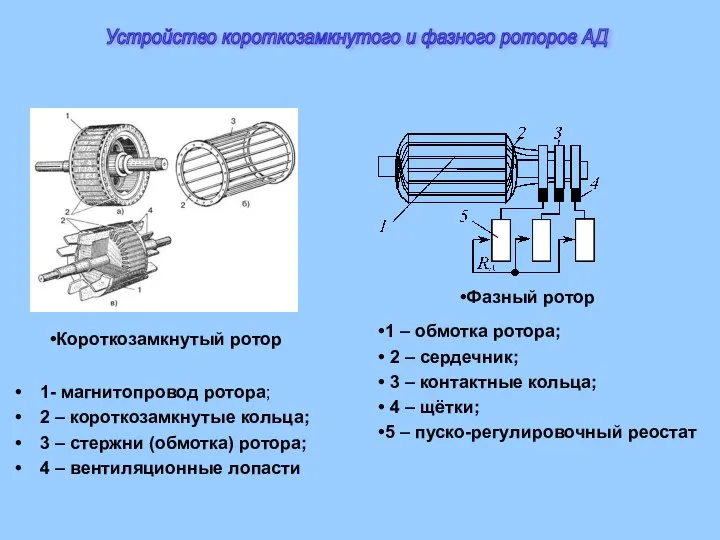
1- магнитопровод ротора;
2 – короткозамкнутые кольца;
3 – стержни (обмотка) ротора;
4
1- магнитопровод ротора;
2 – короткозамкнутые кольца;
3 – стержни (обмотка) ротора;
4
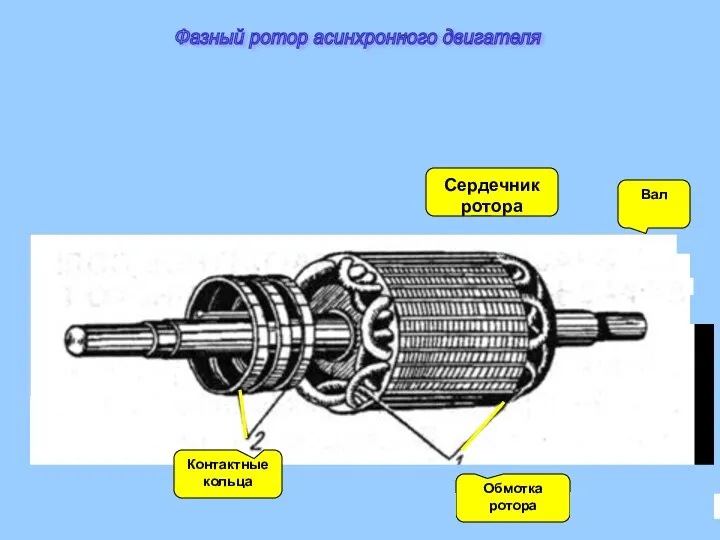
Устройство фазного ротора
а
Вал
Сердечник ротора
Обмотка ротора
Контактные кольца
Фазный ротор асинхронного двигателя
Устройство фазного ротора
а
Вал
Сердечник ротора
Обмотка ротора
Контактные кольца
Фазный ротор асинхронного двигателя
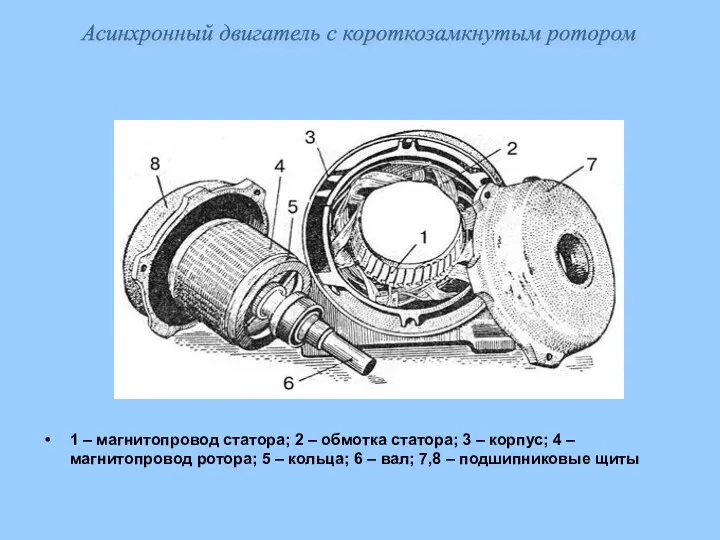
1 – магнитопровод статора; 2 – обмотка статора; 3 – корпус;
1 – магнитопровод статора; 2 – обмотка статора; 3 – корпус;

n0 = 1/ Т, об/сек = 60f / p, об/ мин
n0 = 1/ Т, об/сек = 60f / p, об/ мин
Образование вращающегося магнитного поля
Образование вращающегося магнитного поля
U1
I1
I1W1
Ф1
Фр
Ф2
Е2
Е1
I2W2
I2
Мвр
Мпр
n
ЭМИ
ЭМС
РМ
Электромагнитная
индукция
Электромагнитная
сила
Частота вращения потока статора n0
Частота нап-ряжения сети
Частота вращения магнитного потока
статора
Число пар
U1
I1
I1W1
Ф1
Фр
Ф2
Е2
Е1
I2W2
I2
Мвр
Мпр
n
ЭМИ
ЭМС
РМ
Электромагнитная
индукция
Электромагнитная
сила
Частота вращения потока статора n0
Частота нап-ряжения сети
Частота вращения магнитного потока
статора
Число пар
Принцип действия АД основан на соз-
дании вращающегося магнитного поля (ВМП), получаемое
Принцип действия АД основан на соз-
дании вращающегося магнитного поля (ВМП), получаемое
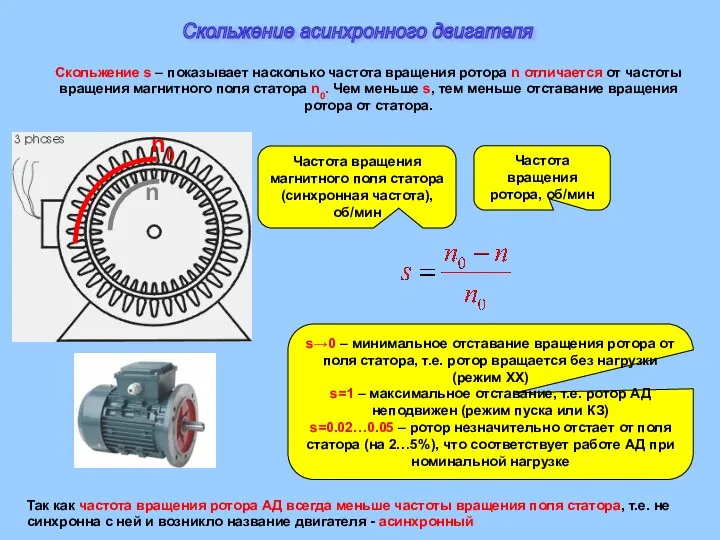
Частота вращения ротора, об/мин
Частота вращения магнитного поля статора (синхронная частота), об/мин
s→0
Частота вращения ротора, об/мин
Частота вращения магнитного поля статора (синхронная частота), об/мин
s→0
Частота пересечения проводников обмотки ротора магнитным потоком статора:
50 Гц
Изменение
Частота пересечения проводников обмотки ротора магнитным потоком статора:
50 Гц
Изменение
ЭДС обмотки вращающегося ротора:
Е2s = 4,44f2sw2Kоб2Фm = sЕ2,
где Е2 = 4,44f2w2Kоб2Фm – ЭДС
ЭДС обмотки вращающегося ротора:
Е2s = 4,44f2sw2Kоб2Фm = sЕ2,
где Е2 = 4,44f2w2Kоб2Фm – ЭДС
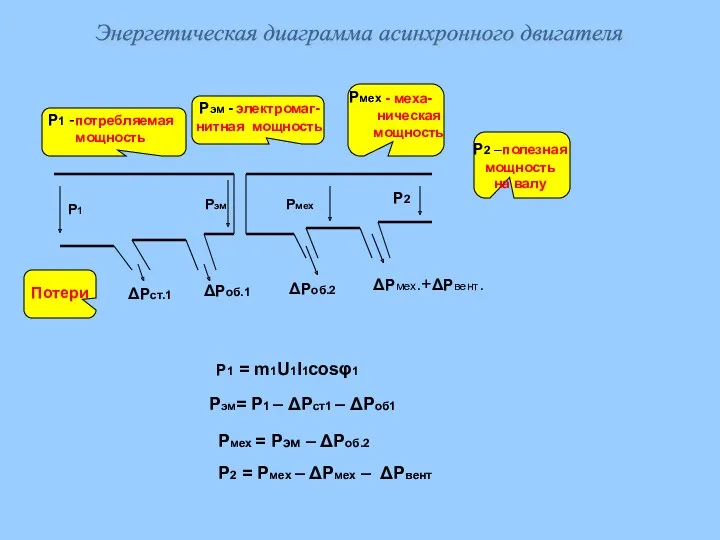
Р1
Рэм
Рмех
Р2
Р1 -потребляемая
мощность
Рэм - электромаг-
нитная мощность
- меха-
ническая
мощность
Р2 –полезная
мощность
на валу
Рэм= Р1
Р1
Рэм
Рмех
Р2
Р1 -потребляемая
мощность
Рэм - электромаг-
нитная мощность
- меха-
ническая
мощность
Р2 –полезная
мощность
на валу
Рэм= Р1
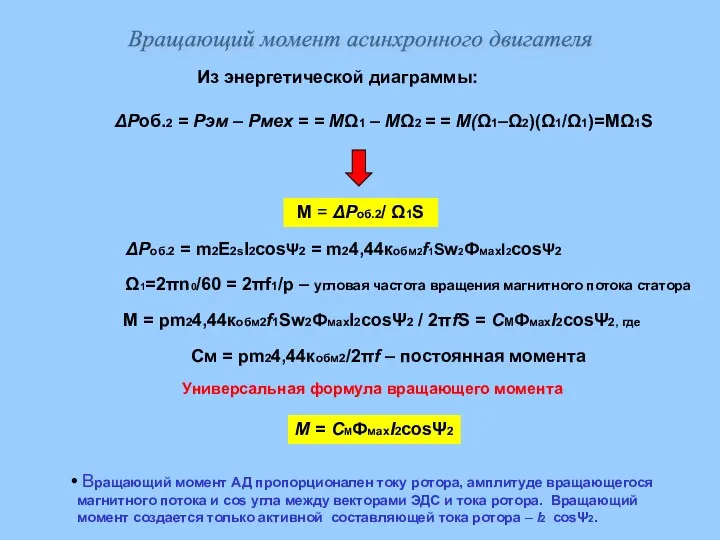
ΔРоб.2 = Рэм – Рмех = = МΩ1 – МΩ2 = = М(Ω1–Ω2)(Ω1/Ω1)=МΩ1S
М = ΔРоб.2/ Ω1S
ΔРоб.2 = m2Е2sI2cosΨ2 =
ΔРоб.2 = Рэм – Рмех = = МΩ1 – МΩ2 = = М(Ω1–Ω2)(Ω1/Ω1)=МΩ1S
М = ΔРоб.2/ Ω1S
ΔРоб.2 = m2Е2sI2cosΨ2 =
В схеме рис.а мощность, выделяемая на участке с R2
равна по
В схеме рис.а мощность, выделяемая на участке с R2
равна по
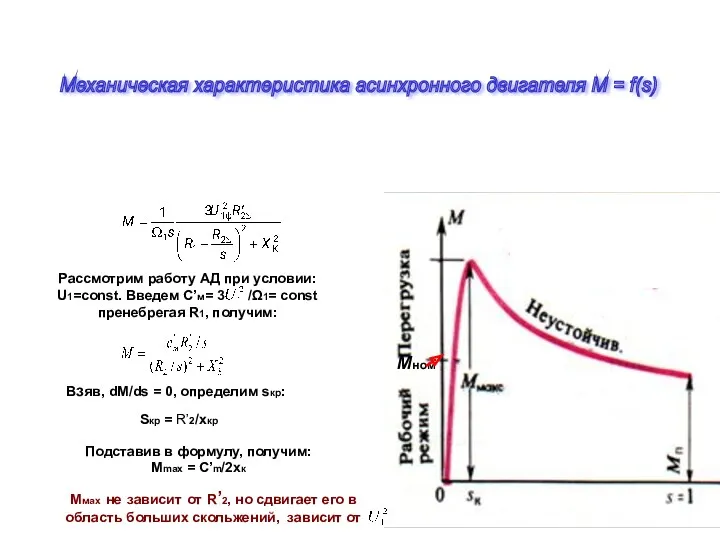
Рассмотрим работу АД при условии:
U1=const. Введем С’м= 3 /Ω1= const
пренебрегая
Рассмотрим работу АД при условии:
U1=const. Введем С’м= 3 /Ω1= const
пренебрегая
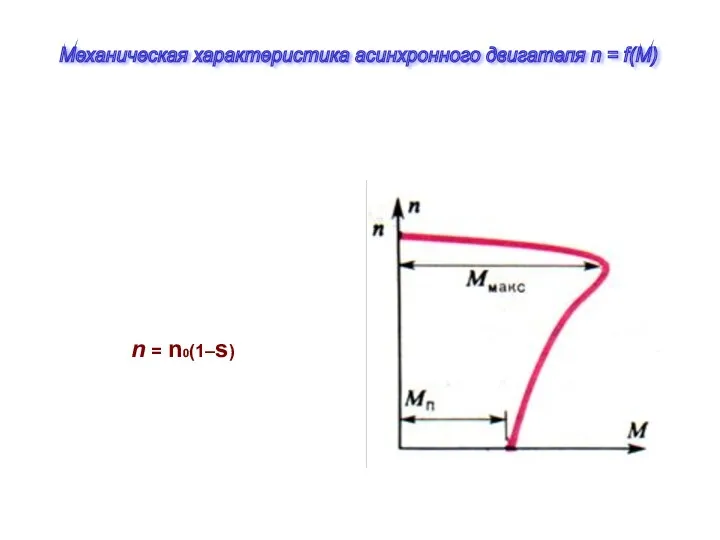
n = n0(1–s)
Механическая характеристика асинхронного двигателя n = f(M)
n = n0(1–s)
Механическая характеристика асинхронного двигателя n = f(M)
n0
n,
об/мин
nн
Мн
Мп
Мкр
М, Нм
Номинальная частота вращения вала. Потери частоты вращения под номинальной
n0
n,
об/мин
nн
Мн
Мп
Мкр
М, Нм
Номинальная частота вращения вала. Потери частоты вращения под номинальной
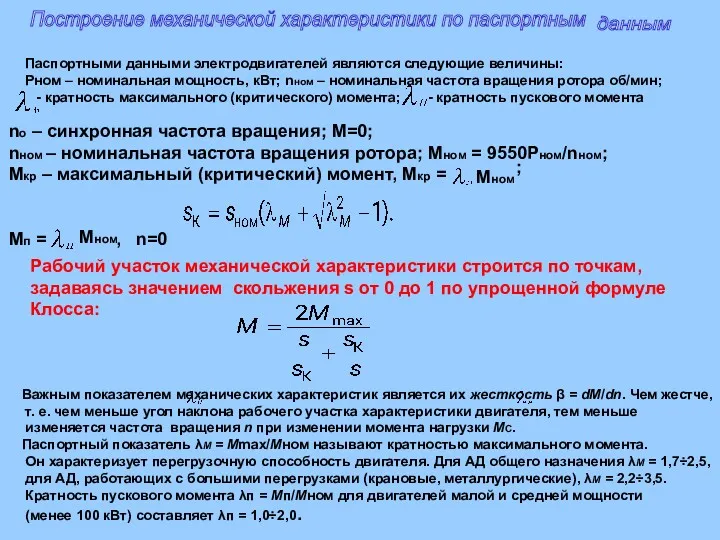
Паспортными данными электродвигателей являются следующие величины:
Рном – номинальная мощность, кВт; nном
Паспортными данными электродвигателей являются следующие величины:
Рном – номинальная мощность, кВт; nном
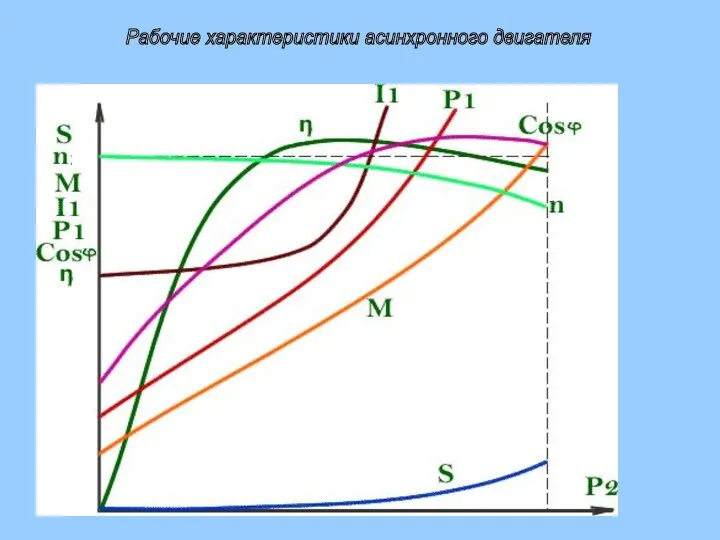
Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя
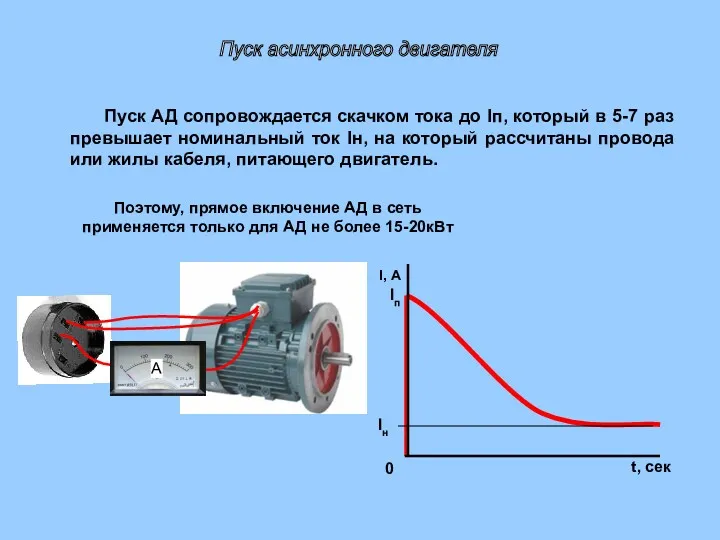
Пуск АД сопровождается скачком тока до Iп, который в 5-7
Пуск АД сопровождается скачком тока до Iп, который в 5-7
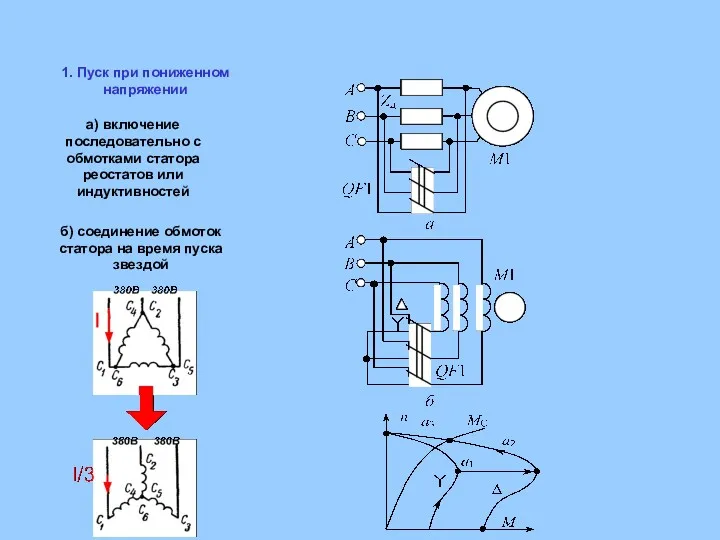
1. Пуск при пониженном напряжении
а) включение последовательно с обмотками статора реостатов
1. Пуск при пониженном напряжении
а) включение последовательно с обмотками статора реостатов
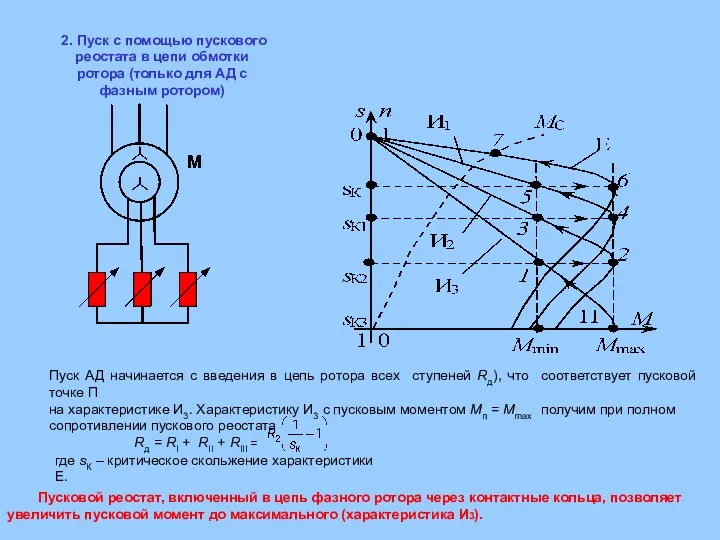
2. Пуск с помощью пускового реостата в цепи обмотки ротора (только
2. Пуск с помощью пускового реостата в цепи обмотки ротора (только
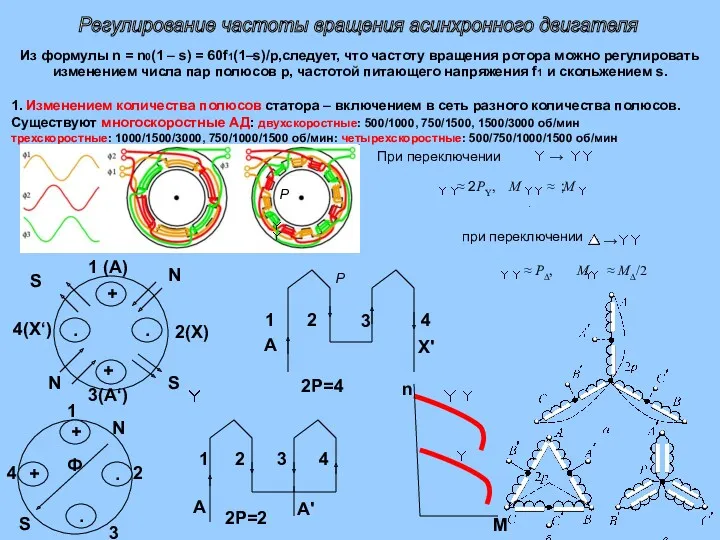
1. Изменением количества полюсов статора – включением в сеть разного количества
1. Изменением количества полюсов статора – включением в сеть разного количества
Система
Импульсно-фазовового
управления
2. Изменением скольжения для двигателя с короткозамкнутым ротором
Система
Импульсно-фазовового
управления
2. Изменением скольжения для двигателя с короткозамкнутым ротором
1
2
3
4
5
6
7
n
n0
M
Mc
Путем введения в цепь обмоток ротора реостатов.
Недостатки данного способа:
1
2
3
4
5
6
7
n
n0
M
Mc
Путем введения в цепь обмоток ротора реостатов.
Недостатки данного способа:
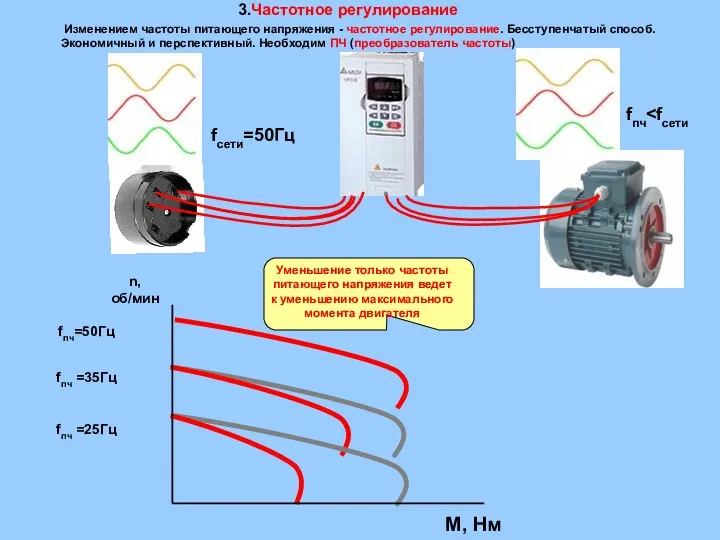
3.Частотное регулирование
М, Нм
n,
об/мин
fпч=50Гц
fпч =35Гц
fпч =25Гц
fсети=50Гц
fпчУменьшение только частоты
питающего напряжения ведет
к
3.Частотное регулирование
М, Нм
n,
об/мин
fпч=50Гц
fпч =35Гц
fпч =25Гц
fсети=50Гц
fпч Уменьшение только частоты
питающего напряжения ведет
к

Продолжение частотного регулирования
Изменение частоты по закону:
позволяет регулировать частоту вращения без изменение
Продолжение частотного регулирования
Изменение частоты по закону:
позволяет регулировать частоту вращения без изменение
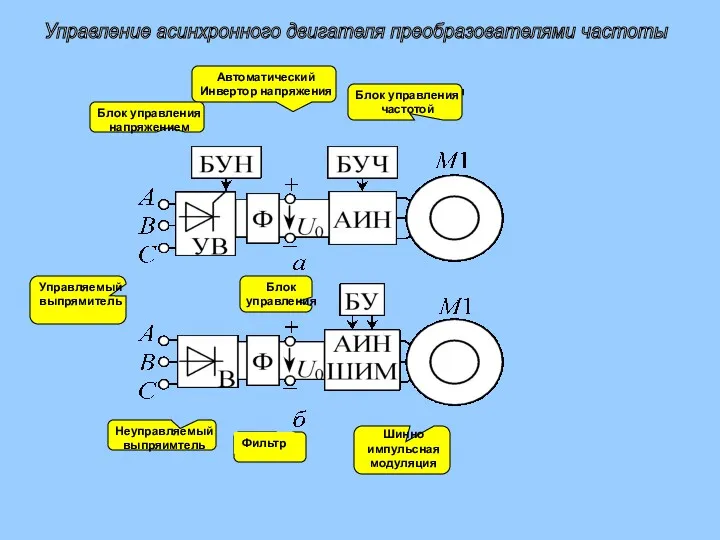
Блок управления
частотой
Блок управления
частотой
Автоматический
Инвертор напряжения
Блок управления
напряжением
Управляемый выпрямитель
Блок
управления
Неуправляемый
выпряимтель
Фильтр
Шинно
импульсная
модуляция
Управление асинхронного двигателя преобразователями частоты
Блок управления
частотой
Блок управления
частотой
Автоматический
Инвертор напряжения
Блок управления
напряжением
Управляемый выпрямитель
Блок
управления
Неуправляемый
выпряимтель
Фильтр
Шинно
импульсная
модуляция
Управление асинхронного двигателя преобразователями частоты
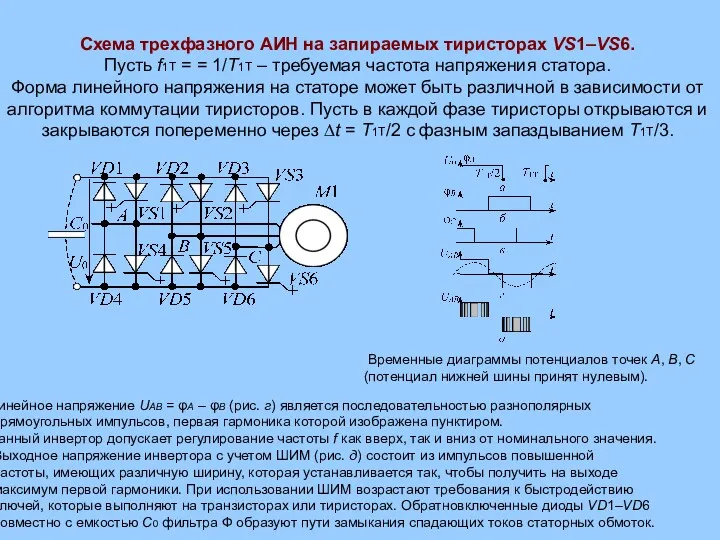
Схема трехфазного АИН на запираемых тиристорах VS1–VS6.
Пусть f1Т = = 1/Т1Т –
Схема трехфазного АИН на запираемых тиристорах VS1–VS6.
Пусть f1Т = = 1/Т1Т –
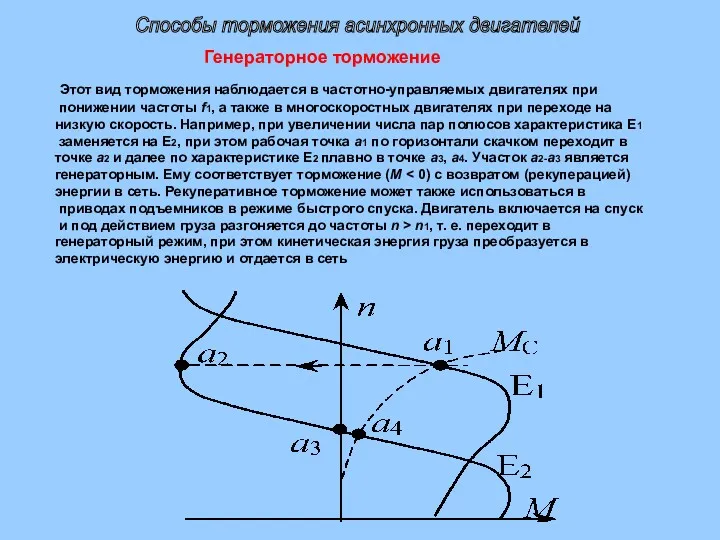
Этот вид торможения наблюдается в частотно-управляемых двигателях при
понижении частоты
Этот вид торможения наблюдается в частотно-управляемых двигателях при
понижении частоты
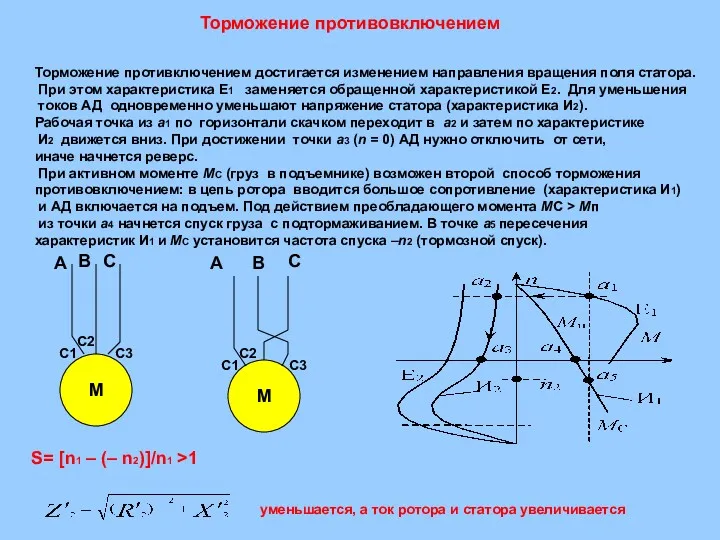
Торможение противключением достигается изменением направления вращения поля статора.
При этом характеристика
Торможение противключением достигается изменением направления вращения поля статора.
При этом характеристика
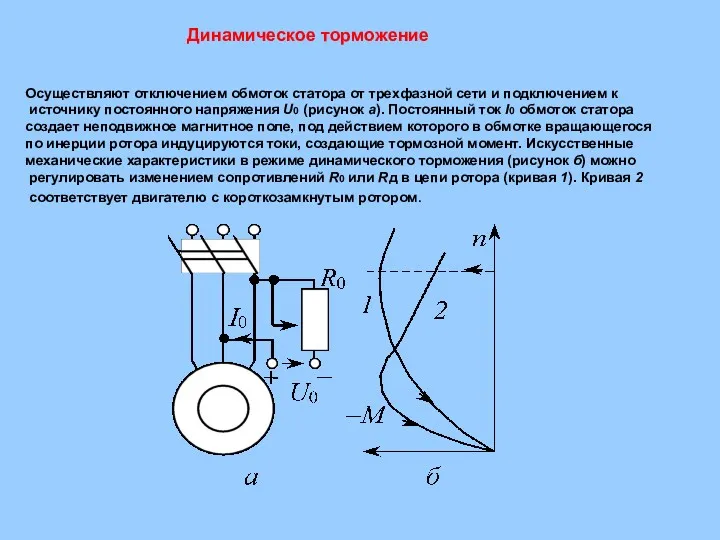
Осуществляют отключением обмоток статора от трехфазной сети и подключением к
источнику
Осуществляют отключением обмоток статора от трехфазной сети и подключением к
источнику

АД выпускаются с синхронной частотой вращения n0 (частотой вращения магнитного поля
АД выпускаются с синхронной частотой вращения n0 (частотой вращения магнитного поля
Pпотр – потребляемая электрическая мощность от источника, Вт
Pпотерь – потери электрической
Pпотр – потребляемая электрическая мощность от источника, Вт
Pпотерь – потери электрической
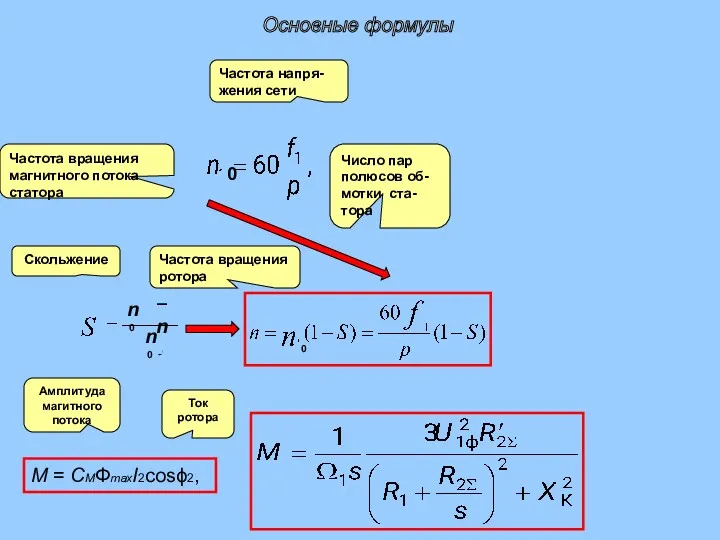
М = СМФmахI2cosϕ2,
Частота вращения магнитного потока
статора
Частота напря-жения сети
Число пар полюсов об- мотки
М = СМФmахI2cosϕ2,
Частота вращения магнитного потока
статора
Частота напря-жения сети
Число пар полюсов об- мотки

Достоинства и недостатки асинхронных двигателей
Достоинства и недостатки асинхронных двигателей

Консольный центробежный насос для сточных масс
Электронасосы моноблочные центробежные циркуляционные для воды
Консольный центробежный насос для сточных масс
Электронасосы моноблочные центробежные циркуляционные для воды

Станция перекачки нефти ЛПДС "Мозырь" Гомельского предприятия
транспорта нефти "Дружба"
Станция перекачки нефти ЛПДС "Мозырь" Гомельского предприятия
транспорта нефти "Дружба"
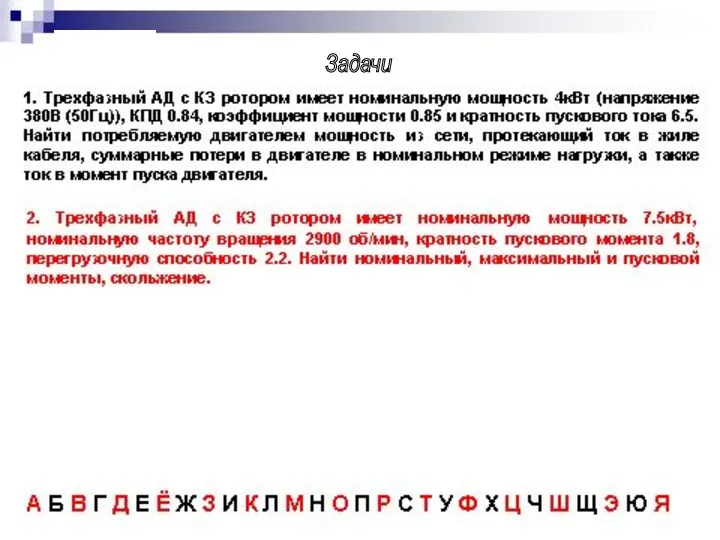
Задачи
Задачи
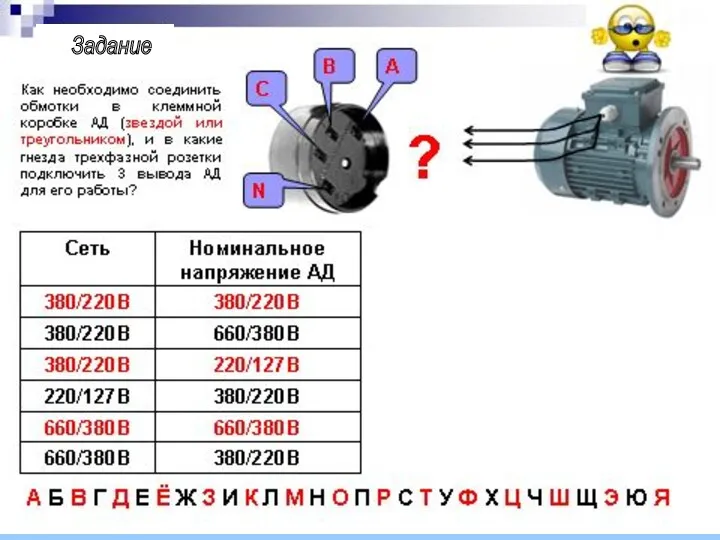
Задание
Задание
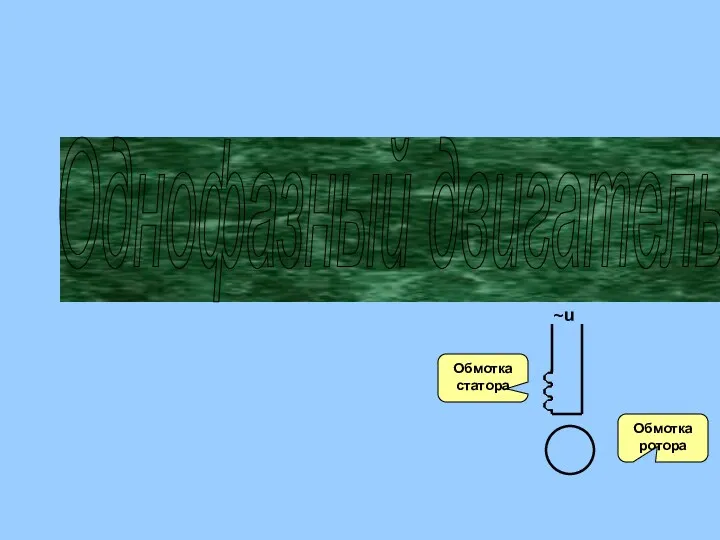
Однофазный двигатель
Обмотка
ротора
Обмотка статора
u
~
Однофазный двигатель
Обмотка
ротора
Обмотка статора
u
~
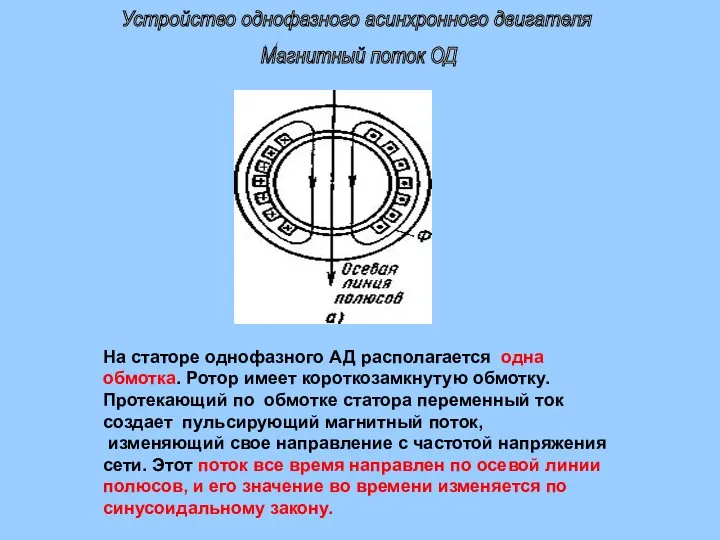
На статоре однофазного АД располагается одна обмотка. Ротор имеет короткозамкнутую обмотку.
На статоре однофазного АД располагается одна обмотка. Ротор имеет короткозамкнутую обмотку.
Ф
Ф
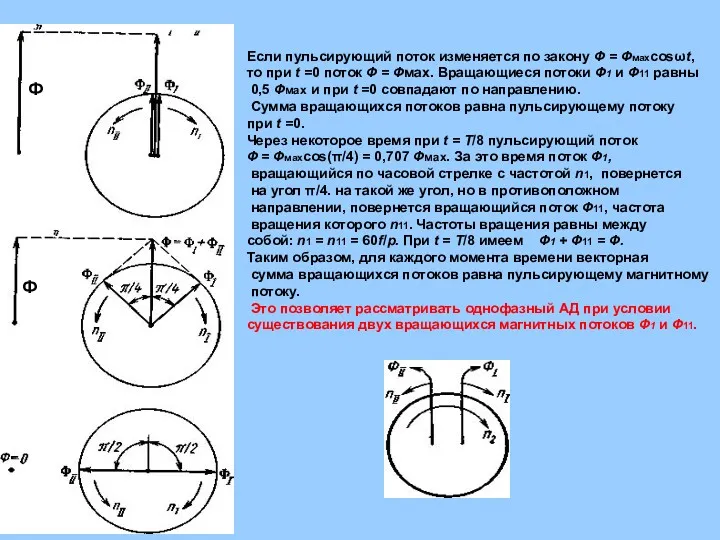
Если пульсирующий поток изменяется по закону Ф = Фмахcosωt,
то при
Ф
Ф
Если пульсирующий поток изменяется по закону Ф = Фмахcosωt,
то при
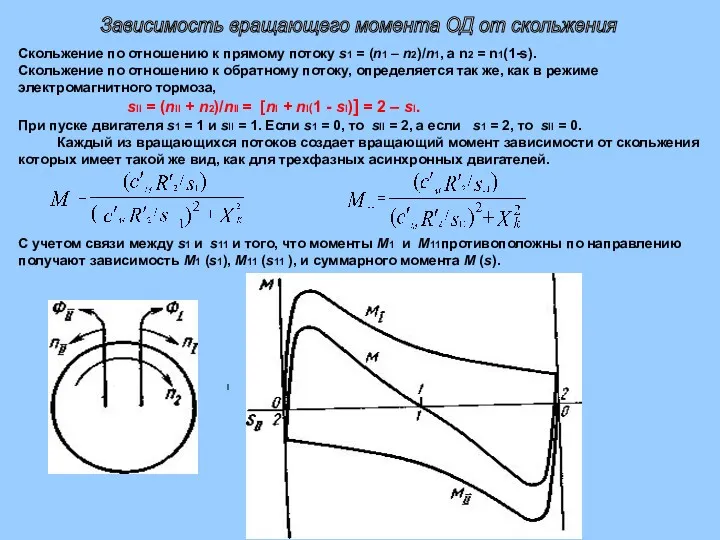
Скольжение по отношению к прямому потоку s1 = (n1 – n2)/n1,
Скольжение по отношению к прямому потоку s1 = (n1 – n2)/n1,
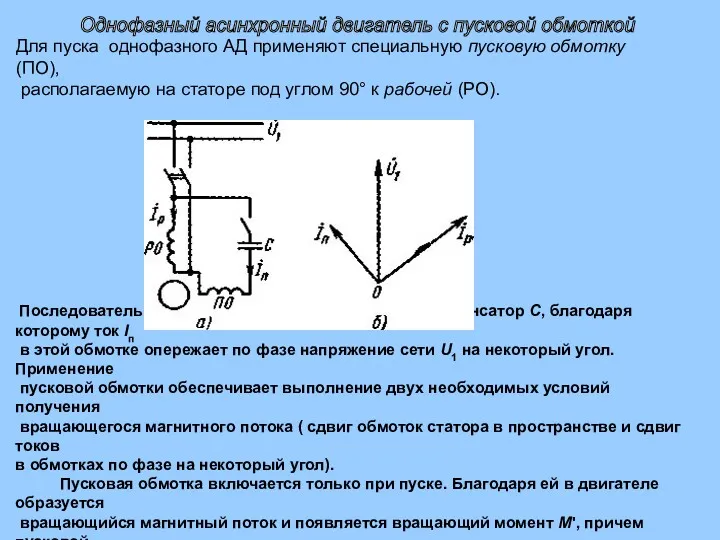
Для пуска однофазного АД применяют специальную пусковую обмотку (ПО),
располагаемую на
Для пуска однофазного АД применяют специальную пусковую обмотку (ПО),
располагаемую на
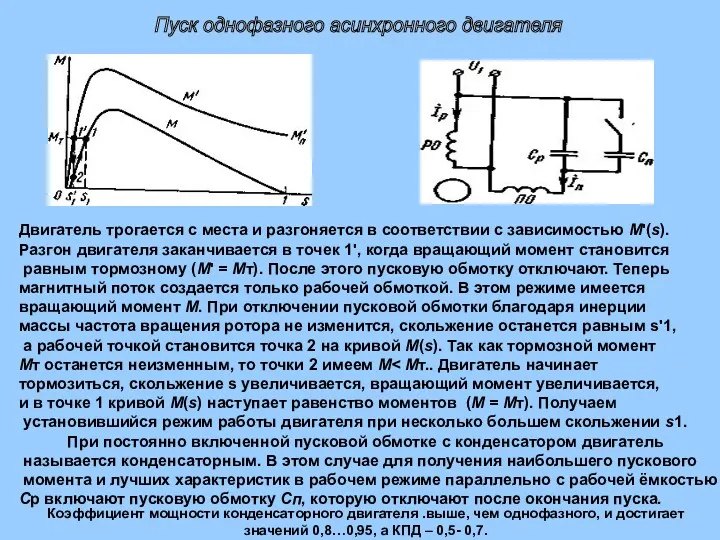
Двигатель трогается с места и разгоняется в соответствии с зависимостью М'(s).
Двигатель трогается с места и разгоняется в соответствии с зависимостью М'(s).
Однофазные асинхронные двигатели нашли применение в:
– системах автоматического управления;
– бытовых
Однофазные асинхронные двигатели нашли применение в:
– системах автоматического управления;
– бытовых
 Сила упругости. Закон Гука
Сила упругости. Закон Гука Внедрение ФГОС общего образования второго поколения по физике
Внедрение ФГОС общего образования второго поколения по физике Актуальные вопросы подготовки к ЕГЭ по физике
Актуальные вопросы подготовки к ЕГЭ по физике Явления переноса в газах
Явления переноса в газах Основы расчета и безопасной эксплуатации элементов, моделируемых в форме тонкостенной оболочки
Основы расчета и безопасной эксплуатации элементов, моделируемых в форме тонкостенной оболочки Стан та перспективи розвитку ремонтно-обслуговуючої бази сільськогосподарської техніки
Стан та перспективи розвитку ремонтно-обслуговуючої бази сільськогосподарської техніки Электромагнетизм. Ускорители заряженных частиц
Электромагнетизм. Ускорители заряженных частиц Исследование зависимости периода колебаний математического маятника
Исследование зависимости периода колебаний математического маятника Испарение и конденсация. Плавление и отвердевание
Испарение и конденсация. Плавление и отвердевание Переменный электрический ток
Переменный электрический ток Организация топливного участка на СТО
Организация топливного участка на СТО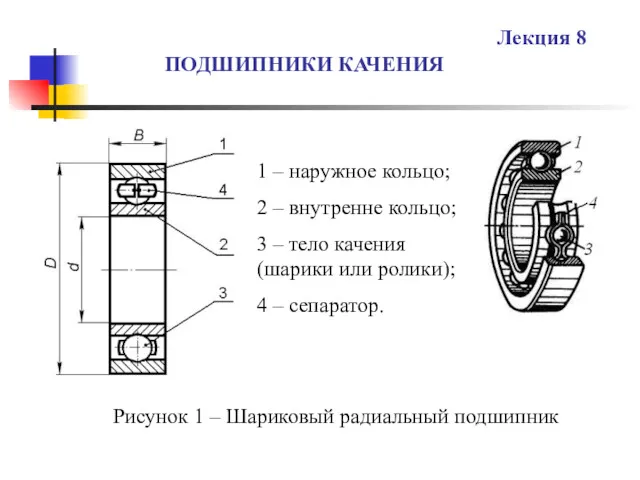 Подшипники качения. (Лекция 8)
Подшипники качения. (Лекция 8) Получение и передача переменного электрического тока
Получение и передача переменного электрического тока Предмет радиотеоэкологии. Цель и задачи радиотеоэкологии
Предмет радиотеоэкологии. Цель и задачи радиотеоэкологии Фотоэлектроколориметрмен боялған сұйықтың концентриясымен анықтау
Фотоэлектроколориметрмен боялған сұйықтың концентриясымен анықтау Электроемкость. Конденсаторы
Электроемкость. Конденсаторы Механика жидкостей и газов. Лекция 9
Механика жидкостей и газов. Лекция 9 Звук и его характеристики. (9 класс)
Звук и его характеристики. (9 класс) Презентация по физике 7 класс Что изучает физика
Презентация по физике 7 класс Что изучает физика Микропрезентация как способ оформления домашнего экспериментального задания
Микропрезентация как способ оформления домашнего экспериментального задания Дифракция света
Дифракция света Механические характеристики электродвигателей постоянного тока
Механические характеристики электродвигателей постоянного тока Электромагнитная индукция. Переменный ток. Электромагнитные волны
Электромагнитная индукция. Переменный ток. Электромагнитные волны Получение компактных нанокристаллических материалов
Получение компактных нанокристаллических материалов Основные законы геометрической оптики (Тема 2)
Основные законы геометрической оптики (Тема 2)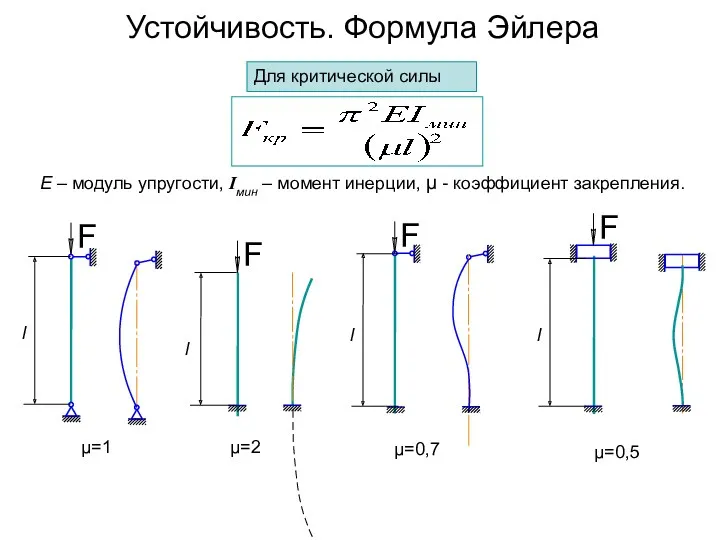 Устойчивость. Формула Эйлера
Устойчивость. Формула Эйлера Построение изображений в линзах
Построение изображений в линзах Улаштування та ТО рульового керування
Улаштування та ТО рульового керування