- Автоматическое вождение пахотных агрегатов

Содержание
- 2. Значительное облегчение условий труда тракториста и уменьшение его психофизической нагрузки при пахоте достигается использованием систем автоматического
- 3. Базовой линией, по которой осуществляется автовождение, является граница вспаханного и невспаханного поля или борозда предыдущего прохода,
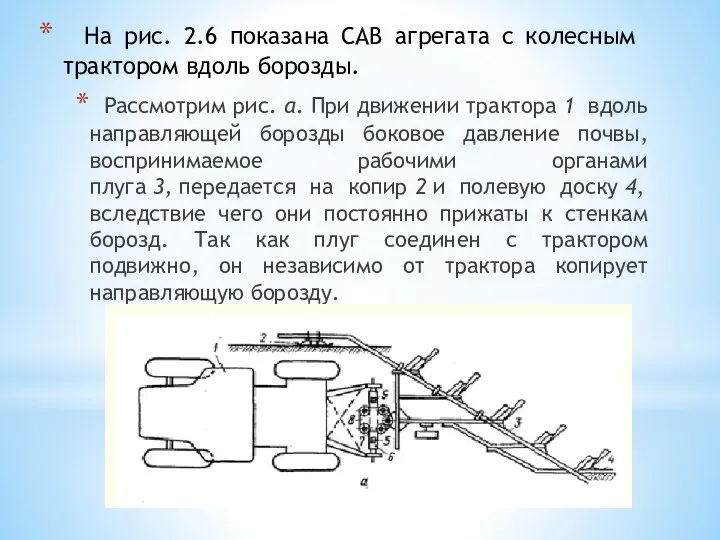
- 4. На рис. 2.6 показана САВ агрегата с колесным трактором вдоль борозды. Рассмотрим рис. а. При движении
- 5. При малом числе рабочих органов применяется простейшая конструкция копира в виде полозка 2, а при большом
- 6. Структурная схема системы показана на рис. б, где приняты следующие обозначения: 1 – чувствительный элемент, 2
- 7. Разработаны САВ, которые имеют два контура управления. Один контур вырабатывает управляющее воздействие на основе линейного отклонения
- 8. Спасибо за внимание
- 10. Скачать презентацию

Значительное облегчение условий труда тракториста и уменьшение его психофизической нагрузки
Значительное облегчение условий труда тракториста и уменьшение его психофизической нагрузки
Базовой линией, по которой осуществляется автовождение, является граница вспаханного и
Базовой линией, по которой осуществляется автовождение, является граница вспаханного и
На рис. 2.6 показана САВ агрегата с колесным трактором вдоль
На рис. 2.6 показана САВ агрегата с колесным трактором вдоль
При малом числе рабочих органов применяется простейшая конструкция копира в
При малом числе рабочих органов применяется простейшая конструкция копира в
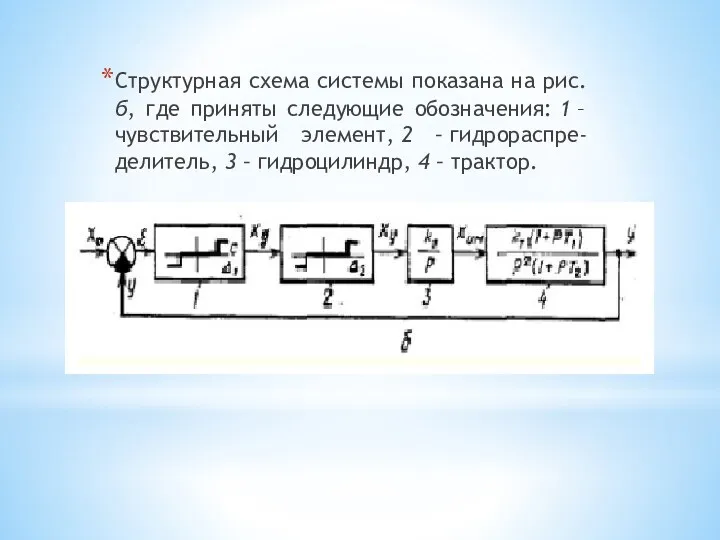
Структурная схема системы показана на рис. б, где приняты следующие обозначения: 1 –
Структурная схема системы показана на рис. б, где приняты следующие обозначения: 1 –
Разработаны САВ, которые имеют два контура управления. Один контур вырабатывает
Разработаны САВ, которые имеют два контура управления. Один контур вырабатывает

Спасибо за внимание
Спасибо за внимание
 Организация технического обслуживания и ремонта автомобиля КамАЗ 4311
Организация технического обслуживания и ремонта автомобиля КамАЗ 4311 Световые явления 8 класс
Световые явления 8 класс Электрический ток в полупроводниках
Электрический ток в полупроводниках Атом ядросының модельдерінің түрлерІ
Атом ядросының модельдерінің түрлерІ Міцність при змінних навантаженнях. (Лекція 2)
Міцність при змінних навантаженнях. (Лекція 2) Соответствие микроклимата учебных кабинетов санитарным правилам и нормам
Соответствие микроклимата учебных кабинетов санитарным правилам и нормам Законы постоянного тока. Решение задач
Законы постоянного тока. Решение задач Явление инерции. Масса
Явление инерции. Масса Сила упругости. Вес тела. Сила тяжести
Сила упругости. Вес тела. Сила тяжести Некоторые средства развития познавательного интереса на уроках физики 7-8 классов.
Некоторые средства развития познавательного интереса на уроках физики 7-8 классов. Свет. Источники света
Свет. Источники света Прикладная голография. Техника голографического эксперимента. (Лекция 7)
Прикладная голография. Техника голографического эксперимента. (Лекция 7) Тепловое расширение твердых тел
Тепловое расширение твердых тел Особенности технологических процессов ремонта тележек локомотива, рессорного подвешивания
Особенности технологических процессов ремонта тележек локомотива, рессорного подвешивания Кинематика
Кинематика Физика в системе естественных наук. Кинематика поступательного движения. (Лекция 1)
Физика в системе естественных наук. Кинематика поступательного движения. (Лекция 1) Основы оптимального приёма сигналов
Основы оптимального приёма сигналов Магнитные электронные линзы
Магнитные электронные линзы Статические элементы оптоэлектронных систем
Статические элементы оптоэлектронных систем корпускулярные свойства света
корпускулярные свойства света Виды спектров
Виды спектров Плавление и отвердевание кристаллических тел. Удельная теплота плавления
Плавление и отвердевание кристаллических тел. Удельная теплота плавления Устройство автомобиля – шасси. Подвеска автомобиля
Устройство автомобиля – шасси. Подвеска автомобиля Рулевое управление автомобилей камаз
Рулевое управление автомобилей камаз Тела, вещества, частицы (окружающий мир, 3 класс)
Тела, вещества, частицы (окружающий мир, 3 класс) Harmonic oscillator Lecture № 10
Harmonic oscillator Lecture № 10 Электромагнитные волны
Электромагнитные волны Обкатка ПА, назначение, порядок проведения
Обкатка ПА, назначение, порядок проведения