Автоматика та її місце в запобіганні надзвичайних ситуацій. Статичні та динамічні характеристики лінійний систем автоматики презентация
- Автоматика та її місце в запобіганні надзвичайних ситуацій. Статичні та динамічні характеристики лінійний систем автоматики

Содержание
- 2. Дисципліна ”Пожежна та виробнича автоматика” Загальна кількість - 136 аудиторних години (6 кредитів) Вивчається 2 СЕМЕСТРИ
- 3. Зміст дисципліни: Модуль 1 Основи будови засобів автоматичного контролю та управління Модуль 2 Прилади і системи
- 4. Дисципліни, що забезпечують: вища математика, теоретична механіка, теорія механізмів і деталей машин, технічна термодинаміка і теплопередача,
- 5. Література: Абрамов Ю. А. Основы пожарной автоматики. - Харьков: ХИПБ МВД Украины, 1993.- 288 с. Абрамов
- 6. Лекція Автоматика та її місце в запобіганні надзвичайних ситуацій. Основні терміни та визначення. Статичні та динамічні
- 7. Питання 1 Основні поняття в галузі систем пожежної автоматики
- 8. Система пожежної автоматики - це сукупність технічних засобів призначених для автоматичного виявлення пожежі, її гасіння та
- 9. Системи пожежної автоматики Системи пожежної сигналізації Системи автоматичного пожежогасіння Автоматичні системи захисту людей від небезпечних чинників
- 10. ОБ'ЄКТ №1 ПРИМІЩЕННЯ № 1 Структура системи пожежної сигналізації ПРИМІЩЕННЯ № n ППКП ПО ППК АСЗПЗ
- 11. Приклад системи пожежної сигналізації
- 12. Класифікація пожежних сповіщувачів За способом приведення в дію: ручні; автоматичні. За видом ознаки пожежі: теплові; димові;
- 13. Класифікація систем пожежогасіння
- 14. Системи водяного пожежогасіння
- 15. Системи газового пожежогасіння
- 16. Модуль порошкового пожежогасіння “Пума-12”
- 17. Генератори вогнегасного аерозолю серії АГС АГС-2 АГС-6
- 18. Питання 2. Загальні відомості про системи автоматичного управління. Основні терміни та визначення
- 19. 1765 р. – Ползунов І.І. застосував перший промисловий регулятор для стабілізації рівня води в паровому казані
- 20. Система автоматичного регулювання рівня води в паровому котлі (система Ползунова) Історія розвитку ТАУ
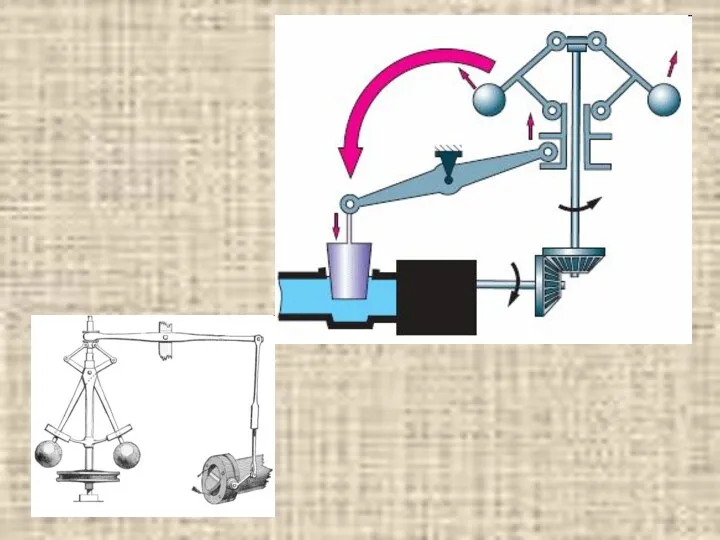
- 21. УАТТ (Watt) Джеймс (1736-1819 рр.), англійський винахідник, розробив универсальний тепловий двигун. Винайшов (1774-84 рр.) парову машину
- 23. Система управління – це активна, підпорядкована сукупність взаємопов'язаних елементів та підсистем, що взаємодіє з зовнішнім середовищем,
- 24. Управлінням називають цілеспрямований вплив на об'єкт управління, що компенсує вплив зовнішнього середовища та призводить його робочий
- 25. Структурна схема САУ Будь яку САУ можна уявити як сукупність двох частин: об'єкт управління та управляючий
- 26. Принципи управління Принцип управління САУ – це основні положення (правила), що визначають взаємодію УП та ОУ(ОК),
- 27. В САУ із принципом управління по відхиленню регулятор "стежить" за регульованим параметром (РП) і порівнює поточне
- 28. Схема замкнутої САУ Вим. П – виміруючий пристрій; КП – керуючий пристрій; Вик. П – виконавчий
- 29. Перевагою замкнутих САУ є висока статична точність. Управління можна здійснювати доти поки величина ε не буде
- 30. В САУ із принципом управління по збуренню регулятор "стежить" за зовнішніми збуреннями, що впливають на ОК,
- 31. Схема розімкнутої САУ Преобр.прист – перетворюючий пристрій; Вим. П – виміруючий пристрій; КП – керуючий пристрій;
- 32. Перевагою розімкнутих САУ є висока швидкодія. Сигнал управління починає змінюватися одночасно зі зміною зовнішніх збурень, при
- 33. Комбінований принцип управління Структурна схема комбінованої САУ
- 34. Питання 3. Статичні та динамічні характеристики лінійних систем автоматики Можна виділити три типових стани САУ: спокій
- 35. Статична характеристика – залежність вихідного сигналу елементу або системи від вхідного в статичному режимі. Статичний режим
- 36. Статичні характеристики: Коефіцієнт передачі елементу являє собою відношення вихідної величини елементу у до вхідної величини х
- 37. Статичні характеристики: Похибка елементу: абсолютна; відносна; наведена. Похибка, яка виникає при нормальних умовах експлуатації елементу (при
- 38. Динамічні характеристики: Передаточна функція. Часові характеристики: одинична перехідна функція; імпульсна перехідна функція. Частотні характеристики: амплітудно-фазова ЧХ;
- 39. 1834р. – Якобі Б.С. і Ленц Э.Х. винайшли регулятор напруги. ЯКОБІ Борис Семенович (дійсне ім'я та
- 40. Загальним недоліком перших регуляторів була низька точність регулювання. Спроби збільшити точність часто приводили до непоясненого зниження
- 41. ЧИЖОВ Дмитро Семенович (1785-1852 рр), російський математик і механік, член-кореспондент (1826 р.) і почесний член (1841
- 42. МАКСВЕЛЛ (Maxwell) Джеймс Клерк (Clerk) (1831-1879рр.), англійський фізик, творець класичної електродинаміки, один з основоположників статистичної фізики,
- 43. 1876 р. Вишнеградський І.О. досліджував проблеми стійкості і точності регулювання. Показав, що безглуздо досліджувати регулятор без
- 44. 1877 р. Раус Е. – описав спосіб дослідження стійкості АС по співвідношенню коефіцієнтів їх лінійних диференціальних
- 46. Скачать презентацию
Дисципліна
”Пожежна та виробнича автоматика”
Загальна кількість - 136 аудиторних години (6 кредитів)
Вивчається
Дисципліна
”Пожежна та виробнича автоматика”
Загальна кількість - 136 аудиторних години (6 кредитів)
Вивчається
Зміст дисципліни:
Модуль 1
Основи будови засобів автоматичного контролю та управління
Модуль 2
Прилади
Зміст дисципліни:
Модуль 1
Основи будови засобів автоматичного контролю та управління
Модуль 2
Прилади
Дисципліни, що забезпечують:
вища математика, теоретична механіка, теорія механізмів і деталей
Дисципліни, що забезпечують: вища математика, теоретична механіка, теорія механізмів і деталей
Література:
Абрамов Ю. А. Основы пожарной автоматики. - Харьков: ХИПБ МВД Украины,
Література:
Абрамов Ю. А. Основы пожарной автоматики. - Харьков: ХИПБ МВД Украины,
Лекція
Автоматика та її місце в запобіганні надзвичайних ситуацій. Основні терміни та
Лекція
Автоматика та її місце в запобіганні надзвичайних ситуацій. Основні терміни та
Питання 1
Основні поняття в галузі систем пожежної автоматики
Питання 1
Основні поняття в галузі систем пожежної автоматики
Система пожежної автоматики - це сукупність технічних засобів призначених для автоматичного
Система пожежної автоматики - це сукупність технічних засобів призначених для автоматичного
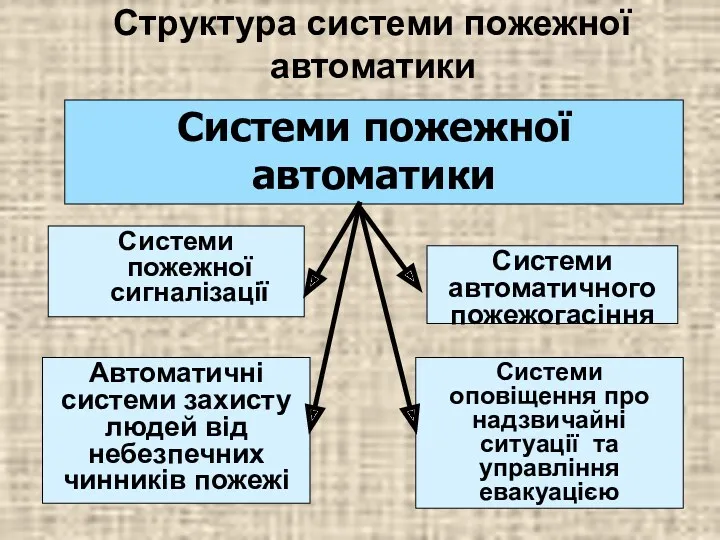
Системи пожежної автоматики
Системи пожежної сигналізації
Системи автоматичного пожежогасіння
Автоматичні системи захисту людей від
Системи пожежної автоматики
Системи пожежної сигналізації
Системи автоматичного пожежогасіння
Автоматичні системи захисту людей від
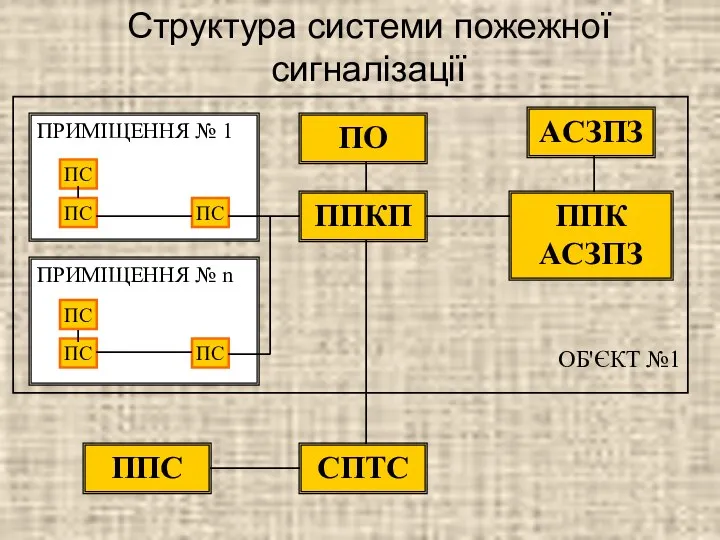
ОБ'ЄКТ №1
ПРИМІЩЕННЯ № 1
Структура системи пожежної сигналізації
ПРИМІЩЕННЯ № n
ППКП
ПО
ППК АСЗПЗ
АCЗПЗ
ППС
CПТC
ОБ'ЄКТ №1
ПРИМІЩЕННЯ № 1
Структура системи пожежної сигналізації
ПРИМІЩЕННЯ № n
ППКП
ПО
ППК АСЗПЗ
АCЗПЗ
ППС
CПТC

Приклад системи пожежної сигналізації
Приклад системи пожежної сигналізації
Класифікація пожежних сповіщувачів
За способом приведення в дію:
ручні;
автоматичні.
За видом ознаки пожежі:
теплові;
димові;
полум'я;
газові.
Класифікація пожежних сповіщувачів
За способом приведення в дію:
ручні;
автоматичні.
За видом ознаки пожежі:
теплові;
димові;
полум'я;
газові.

Класифікація систем пожежогасіння
Класифікація систем пожежогасіння

Системи водяного пожежогасіння
Системи водяного пожежогасіння

Системи газового пожежогасіння
Системи газового пожежогасіння

Модуль порошкового пожежогасіння “Пума-12”
Модуль порошкового пожежогасіння “Пума-12”

Генератори вогнегасного аерозолю серії АГС
АГС-2
АГС-6
Генератори вогнегасного аерозолю серії АГС
АГС-2
АГС-6
Питання 2. Загальні відомості про системи автоматичного управління. Основні терміни та
Питання 2. Загальні відомості про системи автоматичного управління. Основні терміни та
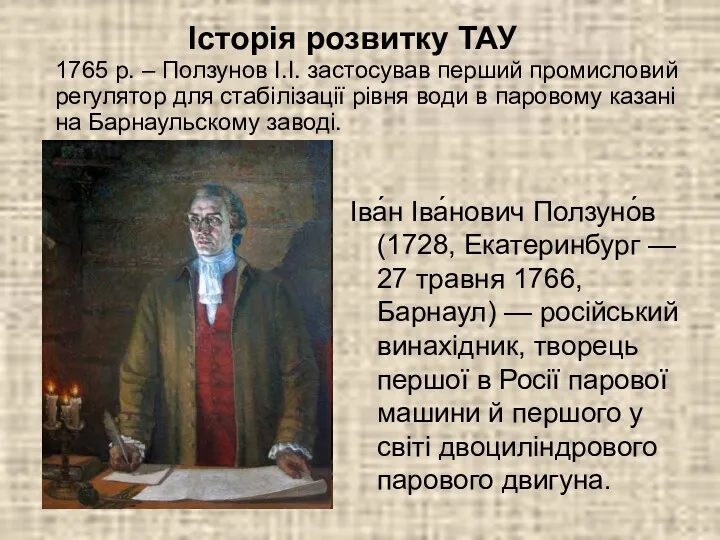
1765 р. – Ползунов І.І. застосував перший промисловий регулятор для стабілізації
1765 р. – Ползунов І.І. застосував перший промисловий регулятор для стабілізації
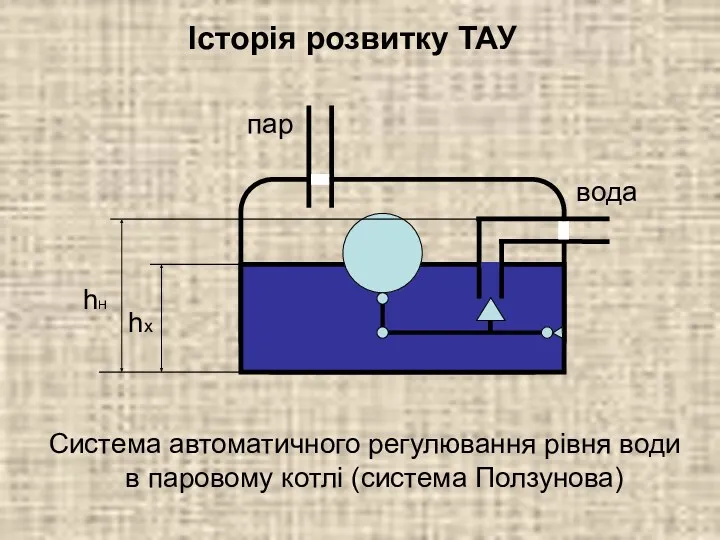
Система автоматичного регулювання рівня води в паровому котлі (система Ползунова)
Історія розвитку
Система автоматичного регулювання рівня води в паровому котлі (система Ползунова)
Історія розвитку
УАТТ (Watt) Джеймс (1736-1819 рр.), англійський винахідник, розробив универсальний тепловий двигун.
УАТТ (Watt) Джеймс (1736-1819 рр.), англійський винахідник, розробив универсальний тепловий двигун.
Система управління – це активна, підпорядкована сукупність взаємопов'язаних елементів та підсистем,
Система управління – це активна, підпорядкована сукупність взаємопов'язаних елементів та підсистем,
Управлінням називають цілеспрямований вплив на об'єкт управління, що компенсує вплив зовнішнього
Управлінням називають цілеспрямований вплив на об'єкт управління, що компенсує вплив зовнішнього
Структурна схема САУ
Будь яку САУ можна уявити як сукупність двох частин:
Структурна схема САУ
Будь яку САУ можна уявити як сукупність двох частин:
Принципи управління
Принцип управління САУ – це основні положення (правила), що визначають
Принципи управління
Принцип управління САУ – це основні положення (правила), що визначають
В САУ із принципом управління по відхиленню регулятор "стежить" за регульованим
В САУ із принципом управління по відхиленню регулятор "стежить" за регульованим
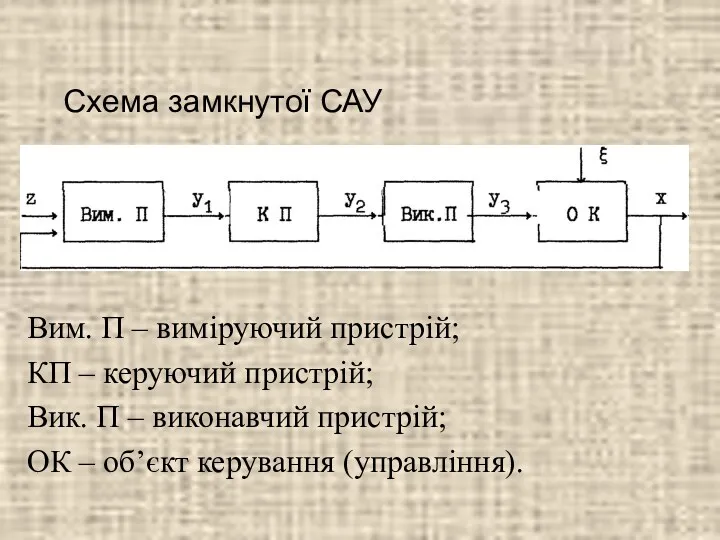
Схема замкнутої САУ
Вим. П – виміруючий пристрій;
КП – керуючий пристрій;
Вик. П
Схема замкнутої САУ
Вим. П – виміруючий пристрій;
КП – керуючий пристрій;
Вик. П
Перевагою замкнутих САУ є висока статична точність. Управління можна здійснювати доти
Перевагою замкнутих САУ є висока статична точність. Управління можна здійснювати доти
В САУ із принципом управління по збуренню регулятор "стежить" за зовнішніми
В САУ із принципом управління по збуренню регулятор "стежить" за зовнішніми
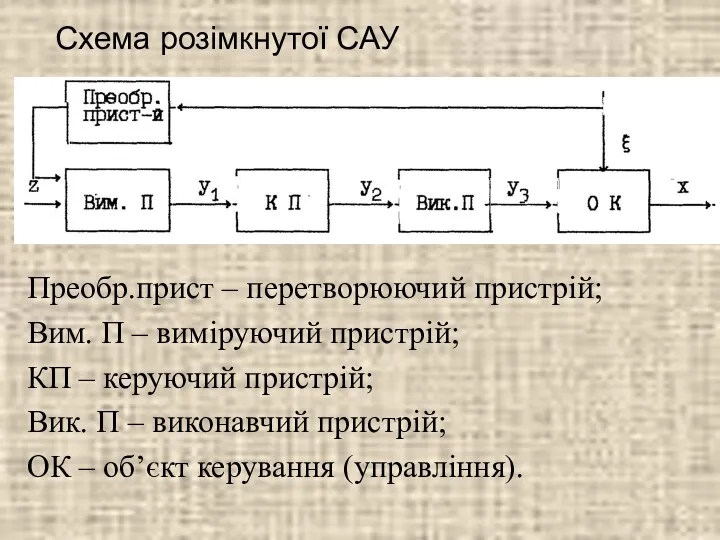
Схема розімкнутої САУ
Преобр.прист – перетворюючий пристрій;
Вим. П – виміруючий пристрій;
КП –
Схема розімкнутої САУ
Преобр.прист – перетворюючий пристрій;
Вим. П – виміруючий пристрій;
КП –
Перевагою розімкнутих САУ є висока швидкодія. Сигнал управління починає змінюватися одночасно
Перевагою розімкнутих САУ є висока швидкодія. Сигнал управління починає змінюватися одночасно
Комбінований принцип управління
Структурна схема комбінованої САУ
Комбінований принцип управління
Структурна схема комбінованої САУ
Питання 3. Статичні та динамічні характеристики лінійних систем автоматики
Можна виділити три
Питання 3. Статичні та динамічні характеристики лінійних систем автоматики
Можна виділити три
Статична характеристика – залежність вихідного сигналу елементу або системи від вхідного
Статична характеристика – залежність вихідного сигналу елементу або системи від вхідного
Статичні характеристики:
Коефіцієнт передачі елементу являє собою відношення вихідної величини елементу у
Статичні характеристики:
Коефіцієнт передачі елементу являє собою відношення вихідної величини елементу у
Статичні характеристики:
Похибка елементу:
абсолютна;
відносна;
наведена.
Похибка, яка виникає при
Статичні характеристики:
Похибка елементу:
абсолютна;
відносна;
наведена.
Похибка, яка виникає при
Динамічні характеристики:
Передаточна функція.
Часові характеристики:
одинична перехідна функція;
імпульсна перехідна функція.
Частотні характеристики:
Динамічні характеристики:
Передаточна функція.
Часові характеристики:
одинична перехідна функція;
імпульсна перехідна функція.
Частотні характеристики:
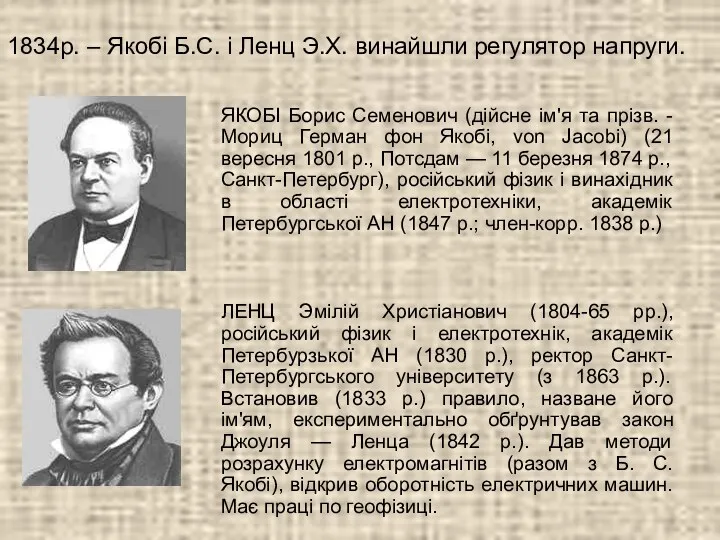
1834р. – Якобі Б.С. і Ленц Э.Х. винайшли регулятор напруги.
ЯКОБІ
1834р. – Якобі Б.С. і Ленц Э.Х. винайшли регулятор напруги.
ЯКОБІ
Загальним недоліком перших регуляторів була низька точність регулювання. Спроби збільшити точність
Загальним недоліком перших регуляторів була низька точність регулювання. Спроби збільшити точність
ЧИЖОВ Дмитро Семенович (1785-1852 рр), російський математик і механік, член-кореспондент (1826
ЧИЖОВ Дмитро Семенович (1785-1852 рр), російський математик і механік, член-кореспондент (1826
МАКСВЕЛЛ (Maxwell) Джеймс Клерк (Clerk) (1831-1879рр.), англійський фізик, творець класичної електродинаміки,
МАКСВЕЛЛ (Maxwell) Джеймс Клерк (Clerk) (1831-1879рр.), англійський фізик, творець класичної електродинаміки,
1876 р. Вишнеградський І.О. досліджував проблеми стійкості і точності регулювання. Показав,
1876 р. Вишнеградський І.О. досліджував проблеми стійкості і точності регулювання. Показав,
1877 р. Раус Е. – описав спосіб дослідження стійкості АС по
1877 р. Раус Е. – описав спосіб дослідження стійкості АС по
 Проводники и диэлектрики в электростатическом поле
Проводники и диэлектрики в электростатическом поле Physics. Lecture 3. Work, energy and power. Conservation of energy. Linear momentum. Collisions
Physics. Lecture 3. Work, energy and power. Conservation of energy. Linear momentum. Collisions 02.21г Поляризация света
02.21г Поляризация света Работа и мощность электрического поля. Закон Джоуля - Ленца
Работа и мощность электрического поля. Закон Джоуля - Ленца Физические основы микроэлектроники
Физические основы микроэлектроники открытый урок-презентация на тему История Российской атомной энергетики
открытый урок-презентация на тему История Российской атомной энергетики Трехфазные цепи
Трехфазные цепи Экзамен ПМ 01. Билет № 3. Методы производства такелажных работ
Экзамен ПМ 01. Билет № 3. Методы производства такелажных работ Тепловые двигатели
Тепловые двигатели Допуски и посадки подшипников качения
Допуски и посадки подшипников качения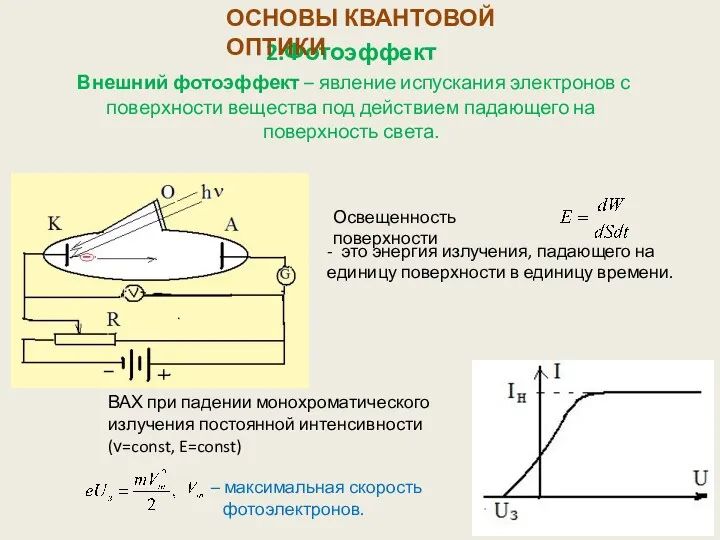 Основы квантовой оптики. Фотоэффект
Основы квантовой оптики. Фотоэффект Ом заңы
Ом заңы Техническое обслуживание и текущий ремонт заднего моста автомобиля
Техническое обслуживание и текущий ремонт заднего моста автомобиля Последовательное и параллельное соединения проводников. Урок 37
Последовательное и параллельное соединения проводников. Урок 37 Двигатели внутреннего сгорания. Система питания
Двигатели внутреннего сгорания. Система питания Измерительные преобразователи систем (датчики)
Измерительные преобразователи систем (датчики) Презентация по физике. Тема Физика атомного ядра.11 класс
Презентация по физике. Тема Физика атомного ядра.11 класс Закон всемирного тяготения. Сила тяжести
Закон всемирного тяготения. Сила тяжести Разработка урока по теме Архимедова сила
Разработка урока по теме Архимедова сила Устройство железнодорожных вагонов
Устройство железнодорожных вагонов Трёхфазные электрические цепи синусоидального тока. (Лекция 3)
Трёхфазные электрические цепи синусоидального тока. (Лекция 3) Ревизия поршневых компрессоров
Ревизия поршневых компрессоров История создания и применения ядерного оружия
История создания и применения ядерного оружия Электризация тел. Электрический заряд. Электроскоп
Электризация тел. Электрический заряд. Электроскоп Задания из ЕГЭ по физике за 2006 год
Задания из ЕГЭ по физике за 2006 год Кавитация в потоке движущейся через насос жидкости. Законы пропорциональности. (Лекция 3)
Кавитация в потоке движущейся через насос жидкости. Законы пропорциональности. (Лекция 3) Постоянные магниты
Постоянные магниты презентация по теме Сила тока.Единицы силы тока. Амперметр
презентация по теме Сила тока.Единицы силы тока. Амперметр