- Автоматизация производственных процессов в машиностроении

Содержание
- 2. 7.3. Принципы построения ГПМ
- 3. Структура ГПМ для механической обработки деталей Н – накопитель Об – технологическое оборудование ВУ – вспомогательное
- 4. Проектирование ГПМ для обработки тел вращения 1. Технологическое оборудование. 2. Автоматизация загрузки/выгрузки. 3. Компоновка модуля.
- 5. А. Портальный робот: одностаночный модуль 1 – портал ПР 2 – манипуля-тор ПР 3 – станок
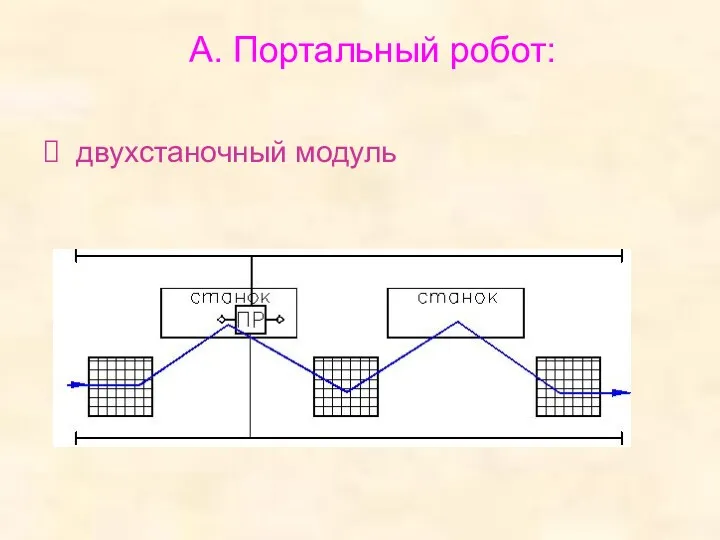
- 6. А. Портальный робот: двухстаночный модуль 1 – портал ПР 2 – манипулятор ПР 3 – станок
- 7. А. Портальный робот: двухстаночный модуль
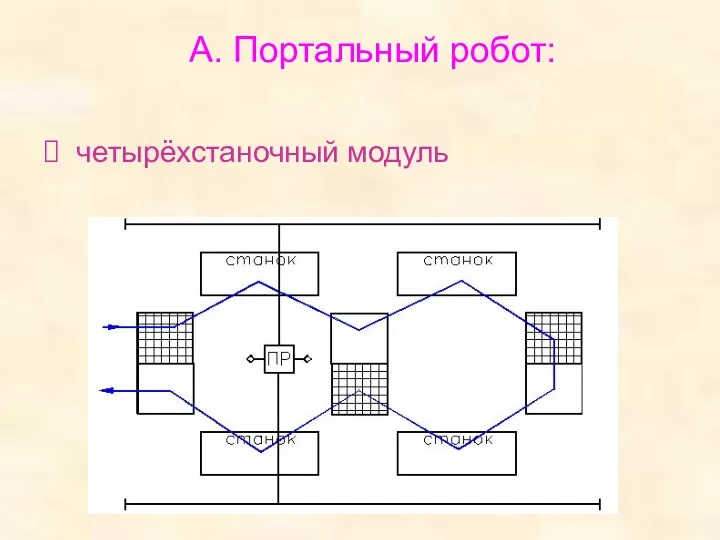
- 8. А. Портальный робот: четырёхстаночный модуль
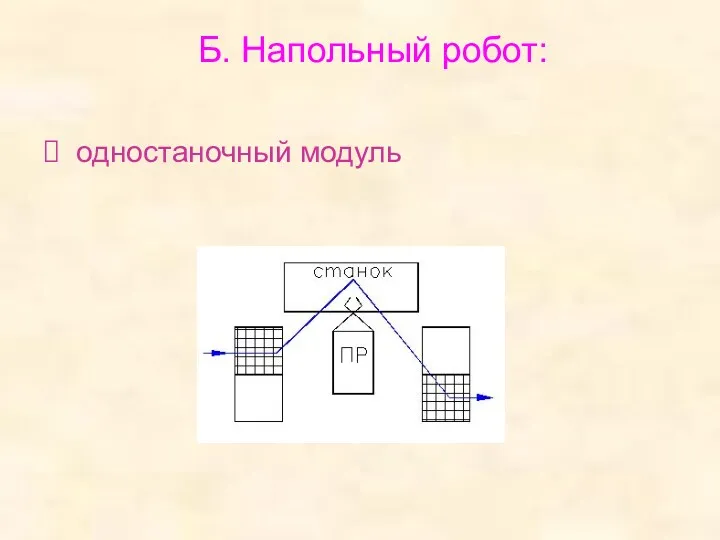
- 9. Б. Напольный робот: одностаночный модуль
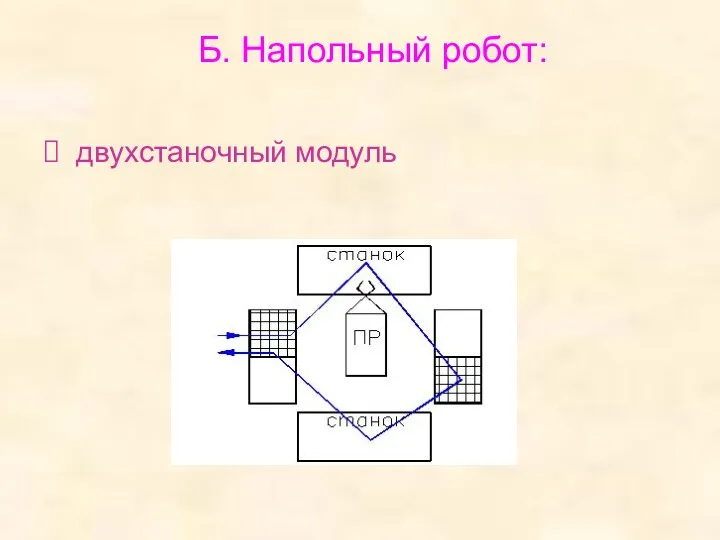
- 10. Б. Напольный робот: двухстаночный модуль
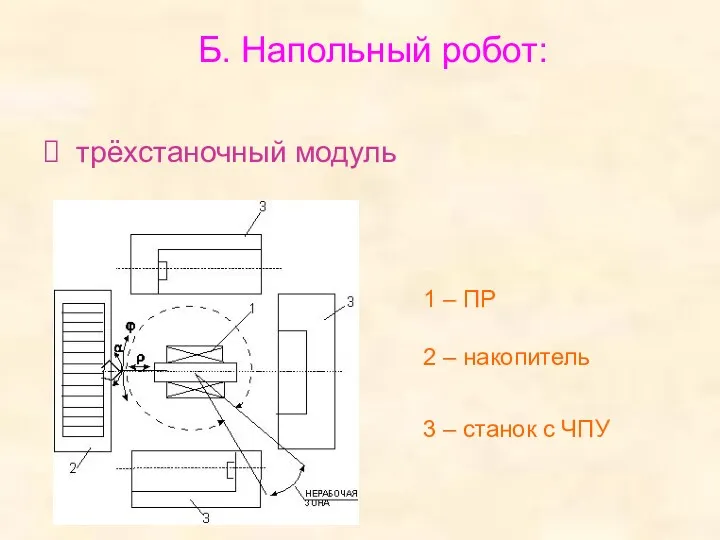
- 11. Б. Напольный робот: трёхстаночный модуль 1 – ПР 2 – накопитель 3 – станок с ЧПУ
- 12. В. Встроенный робот 1 – станок с ЧПУ 2 – патрон шпинделя 3 – ПР 4
- 13. В. Встроенный робот
- 14. Проектирование ГПМ для обработки тел вращения 4. Накопители.
- 15. Кассетный накопитель 3 2 1 3 2 1 1 – кронштейн 2 – кассета 3 –
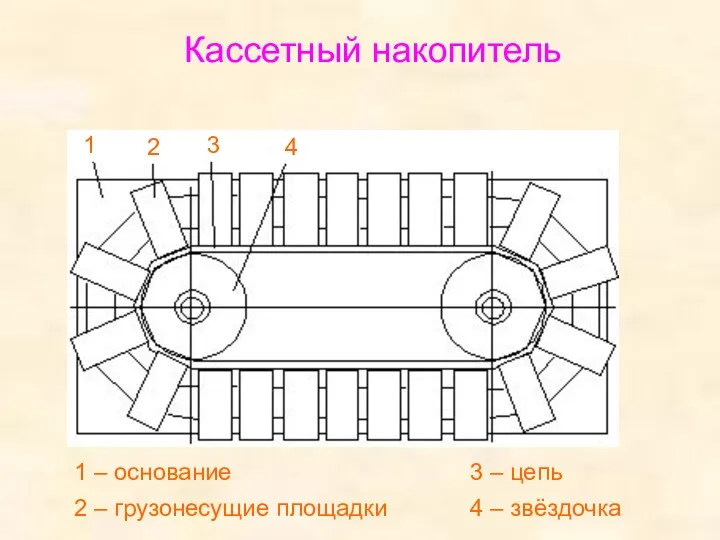
- 16. Кассетный накопитель 1 – основание 2 – грузонесущие площадки 4 – звёздочка 2 1 3 4
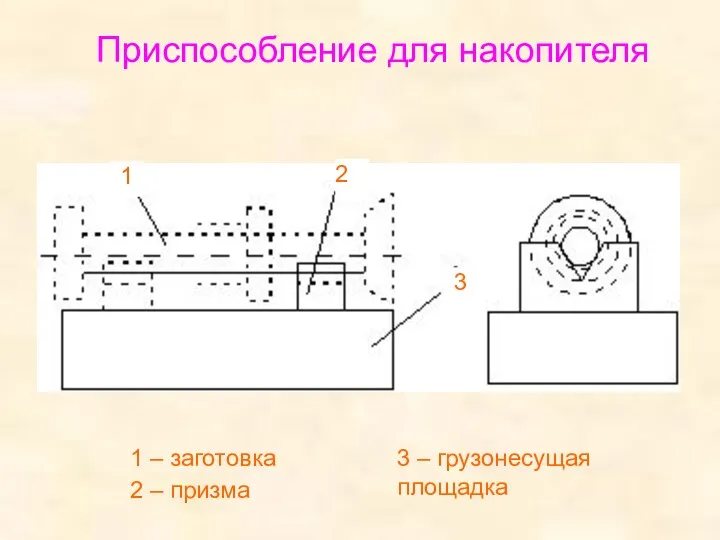
- 17. Приспособление для накопителя 1 – заготовка 2 – призма 3 – грузонесущая площадка
- 18. Проектирование ГПМ для обработки тел вращения 4. Накопители. 5. Закрепление заготовок.
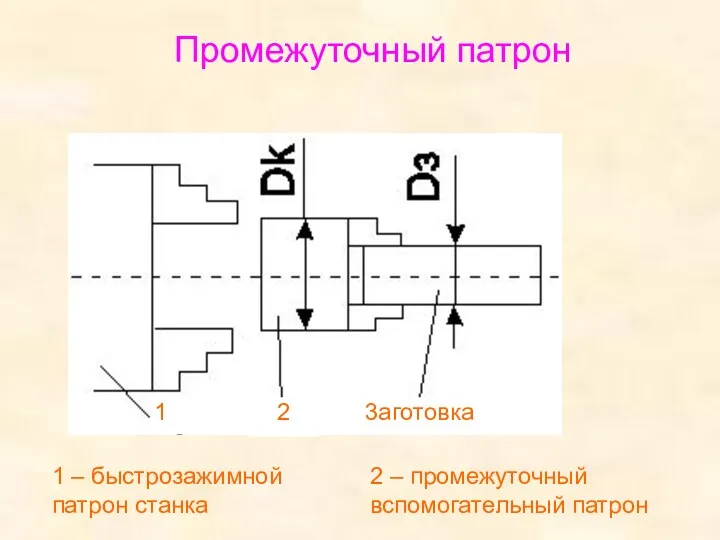
- 19. Промежуточный патрон 1 – быстрозажимной патрон станка 2 – промежуточный вспомогательный патрон 1 2 3аготовка
- 20. Переналаживаемый патрон 1 – корпус 2 – диск 3 – кулачки 4 – центральное зубчатое колесо
- 21. Переналаживаемый патрон 1 – шток поршня цилиндра 2 – патрон 3 – кулачки 4 – захват
- 22. Проектирование ГПМ для обработки тел вращения 4. Накопители. 5. Закрепление заготовок. 6. Замена инструмента. 7. Удаление
- 23. Проектирование ГПМ для обработки корпусных деталей 1. Технологическое оборудование. 2. Загрузка/выгрузка деталей.
- 24. Функциональные поверхности паллет 1 – кромки для базирования 2 – отверстия для защёлки 3 – зеркало
- 25. Варианты базовых поверхностей паллет с резьбовыми отверстиями с радиальными Т-образными пазами
- 26. Станочная паллета
- 27. Вспомогательное приспособление Базовые элементы: 1 – угольник 2 – патрон 3 – плита Установочные и крепёжные
- 28. Проектирование ГПМ для обработки корпусных деталей 1. Технологическое оборудование. 2. Загрузка/выгрузка деталей. 3. Компоновка модуля.
- 29. Структура модуля 1 – обрабатывающий центр 2 – стол центра 3 – приспособление для базирования и
- 30. Проектирование ГПМ для обработки корпусных деталей 4. Накопители.
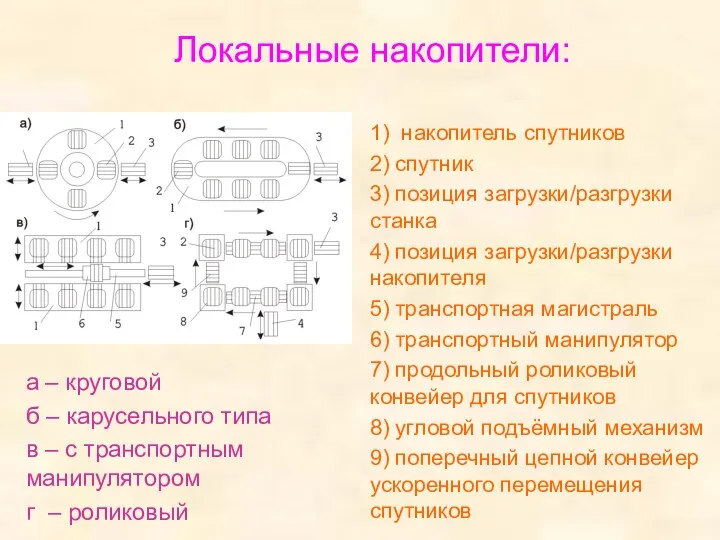
- 31. Локальные накопители: 1) накопитель спутников 2) спутник 3) позиция загрузки/разгрузки станка 4) позиция загрузки/разгрузки накопителя 5)
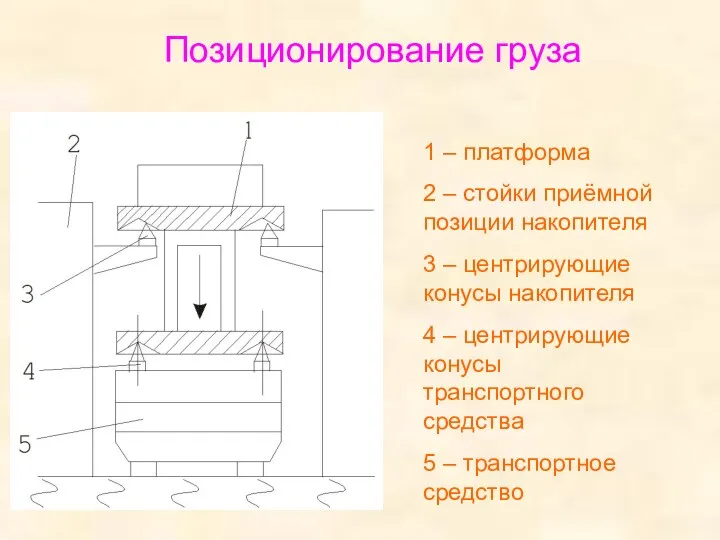
- 32. Позиционирование груза 1 – платформа 2 – стойки приёмной позиции накопителя 3 – центрирующие конусы накопителя
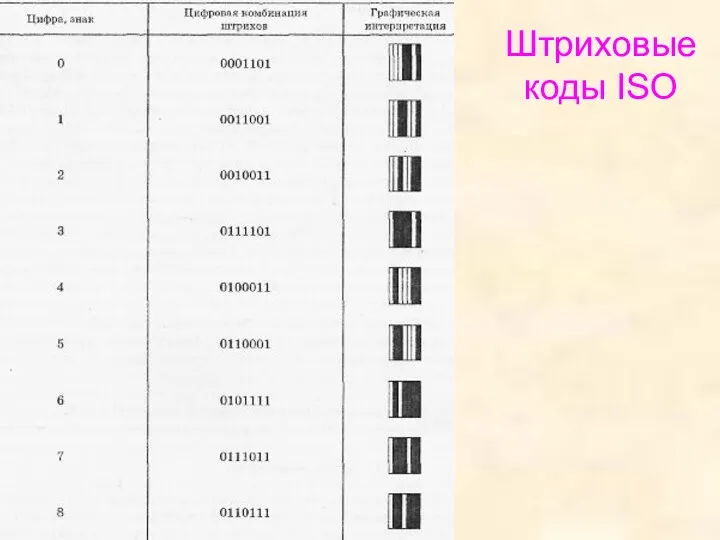
- 33. Штриховые коды ISO
- 34. Проектирование ГПМ для обработки корпусных деталей 4. Накопители. 5. Загрузка спутников.
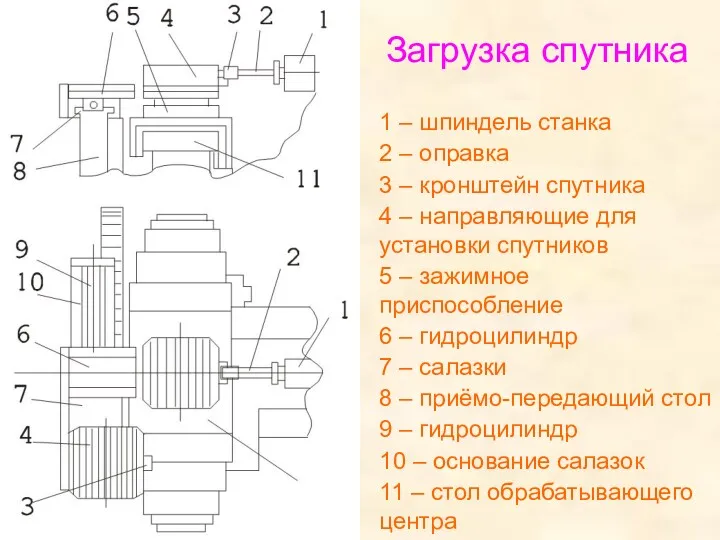
- 35. Загрузка спутника 1 – шпиндель станка 2 – оправка 3 – кронштейн спутника 4 – направляющие
- 36. Приёмо-передающий стол 1 – пульт управления 2 – промежуточный кронштейн 3 – роликовые направляющие 4 –
- 37. Варианты размещения приёмно-передающего стола 1 – загрузочная позиция приёмно-передающего стола с очередным спутником 2 – стол
- 38. Проектирование ГПМ для обработки корпусных деталей 4. Накопители. 5. Загрузка спутников. 6. Замена инструмента.
- 39. Инструментальная кассета на спутнике 1 – спутник; 2 – инструментальная кассета; 3 – сменный инструмент
- 40. 1 – внешний инструментальный магазин; 2 – робот-автооператор; 3 – инструмент с оправкой; 4 – перегрузочное
- 41. 1 – робокар; 2 – робот; 3 – инструментальная стойка; 4 – инструментальный магазин; 5 –
- 42. Проектирование ГПМ для обработки корпусных деталей 4. Накопители. 5. Загрузка спутников. 6. Замена инструмента. 7. Удаление
- 43. Удаление стружки из рабочей зоны 1 – шнековый транспортёр для стружки 2 – наклонные защитные экраны
- 45. Скачать презентацию
7.3. Принципы построения ГПМ
7.3. Принципы построения ГПМ

Структура ГПМ для механической обработки деталей
Н – накопитель
Об – технологическое оборудование
ВУ
Структура ГПМ для механической обработки деталей
Н – накопитель
Об – технологическое оборудование
ВУ
Проектирование ГПМ для обработки тел вращения
1. Технологическое оборудование.
2. Автоматизация загрузки/выгрузки.
3. Компоновка
Проектирование ГПМ для обработки тел вращения
1. Технологическое оборудование.
2. Автоматизация загрузки/выгрузки.
3. Компоновка
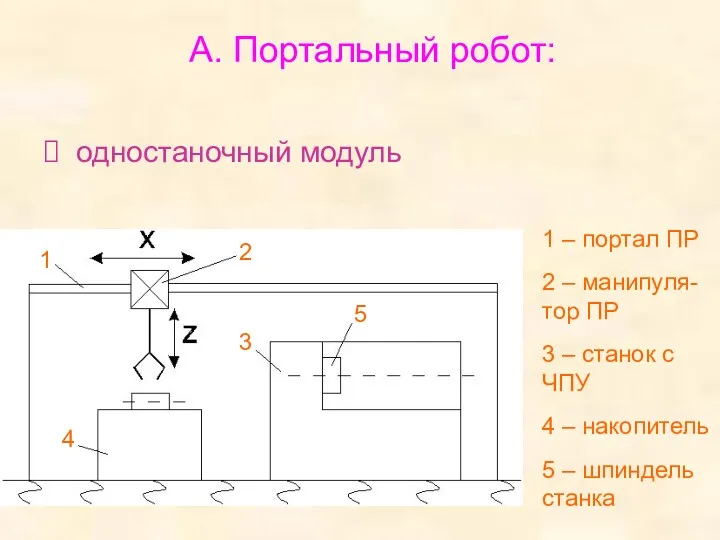
А. Портальный робот:
одностаночный модуль
1 – портал ПР
2 – манипуля-тор ПР
3
А. Портальный робот:
одностаночный модуль
1 – портал ПР
2 – манипуля-тор ПР
3

А. Портальный робот:
двухстаночный модуль
1 – портал ПР
2 – манипулятор ПР
3
А. Портальный робот:
двухстаночный модуль
1 – портал ПР
2 – манипулятор ПР
3
А. Портальный робот:
двухстаночный модуль
А. Портальный робот:
двухстаночный модуль
А. Портальный робот:
четырёхстаночный модуль
А. Портальный робот:
четырёхстаночный модуль
Б. Напольный робот:
одностаночный модуль
Б. Напольный робот:
одностаночный модуль
Б. Напольный робот:
двухстаночный модуль
Б. Напольный робот:
двухстаночный модуль
Б. Напольный робот:
трёхстаночный модуль
1 – ПР
2 – накопитель
3 – станок
Б. Напольный робот:
трёхстаночный модуль
1 – ПР
2 – накопитель
3 – станок
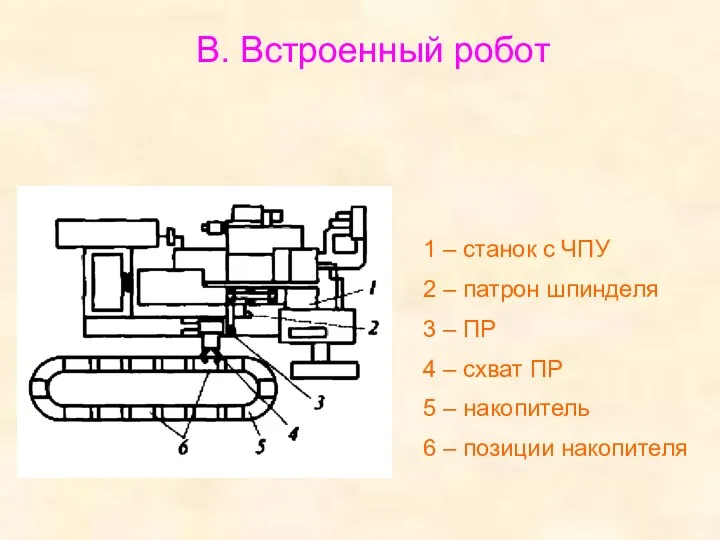
В. Встроенный робот
1 – станок с ЧПУ
2 – патрон шпинделя
3 –
В. Встроенный робот
1 – станок с ЧПУ
2 – патрон шпинделя
3 –
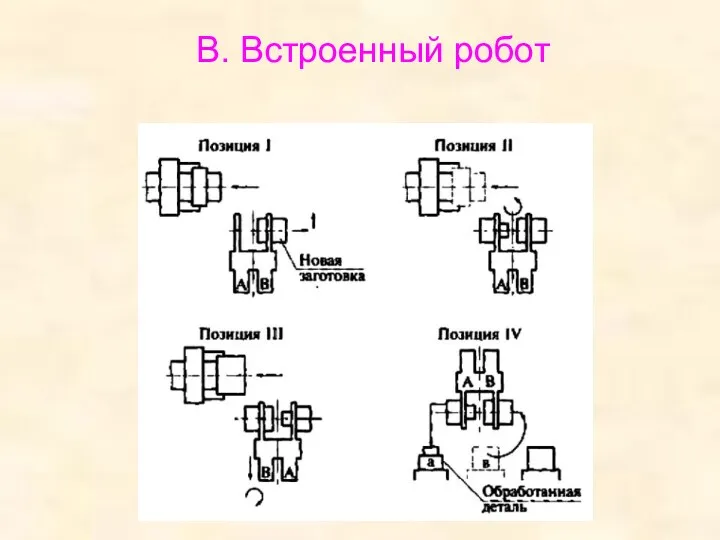
В. Встроенный робот
В. Встроенный робот
Проектирование ГПМ для обработки тел вращения
4. Накопители.
Проектирование ГПМ для обработки тел вращения
4. Накопители.
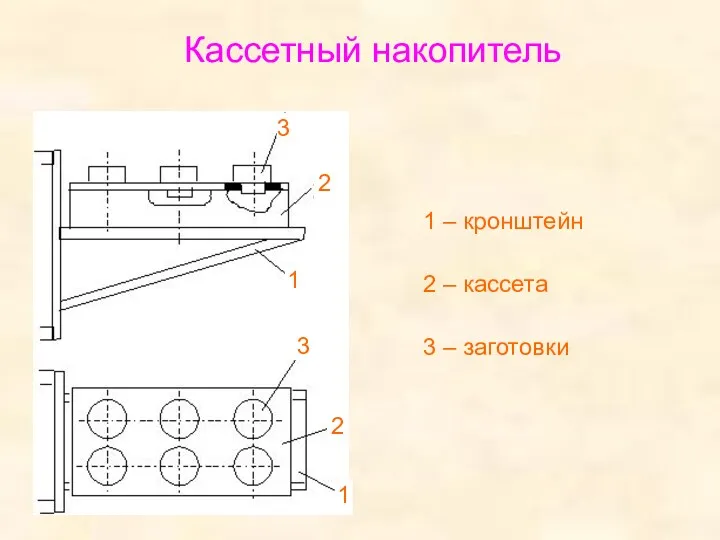
Кассетный накопитель
3
2
1
3
2
1
1 – кронштейн
2 – кассета
3 – заготовки
Кассетный накопитель
3
2
1
3
2
1
1 – кронштейн
2 – кассета
3 – заготовки
Кассетный накопитель
1 – основание
2 – грузонесущие площадки
4 – звёздочка
2
1
3
4
3 – цепь
Кассетный накопитель
1 – основание
2 – грузонесущие площадки
4 – звёздочка
2
1
3
4
3 – цепь
Приспособление для накопителя
1 – заготовка
2 – призма
3 – грузонесущая площадка
Приспособление для накопителя
1 – заготовка
2 – призма
3 – грузонесущая площадка
Проектирование ГПМ для обработки тел вращения
4. Накопители.
5. Закрепление заготовок.
Проектирование ГПМ для обработки тел вращения
4. Накопители.
5. Закрепление заготовок.
Промежуточный патрон
1 – быстрозажимной патрон станка
2 – промежуточный вспомогательный патрон
1
2
3аготовка
Промежуточный патрон
1 – быстрозажимной патрон станка
2 – промежуточный вспомогательный патрон
1
2
3аготовка

Переналаживаемый патрон
1 – корпус
2 – диск
3 – кулачки
4 – центральное зубчатое
Переналаживаемый патрон
1 – корпус
2 – диск
3 – кулачки
4 – центральное зубчатое
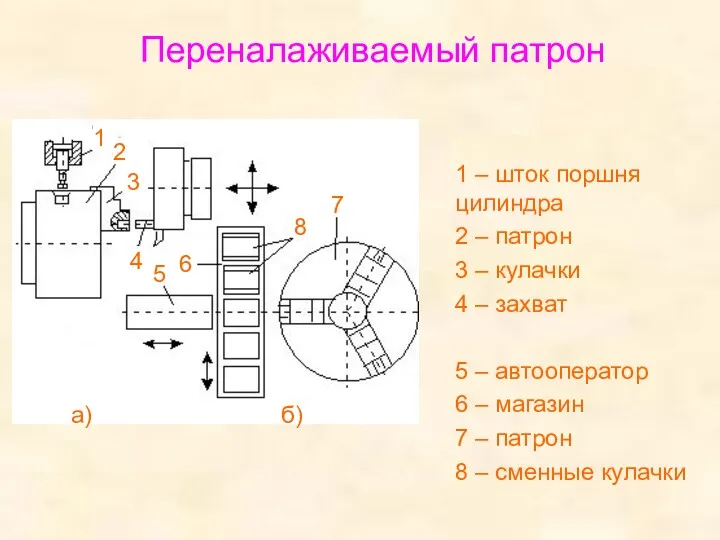
Переналаживаемый патрон
1 – шток поршня цилиндра
2 – патрон
3 – кулачки
4 –
Переналаживаемый патрон
1 – шток поршня цилиндра
2 – патрон
3 – кулачки
4 –
Проектирование ГПМ для обработки тел вращения
4. Накопители.
5. Закрепление заготовок.
6. Замена инструмента.
7.
Проектирование ГПМ для обработки тел вращения
4. Накопители.
5. Закрепление заготовок.
6. Замена инструмента.
7.
Проектирование ГПМ для обработки корпусных деталей
1. Технологическое оборудование.
2. Загрузка/выгрузка деталей.
Проектирование ГПМ для обработки корпусных деталей
1. Технологическое оборудование.
2. Загрузка/выгрузка деталей.
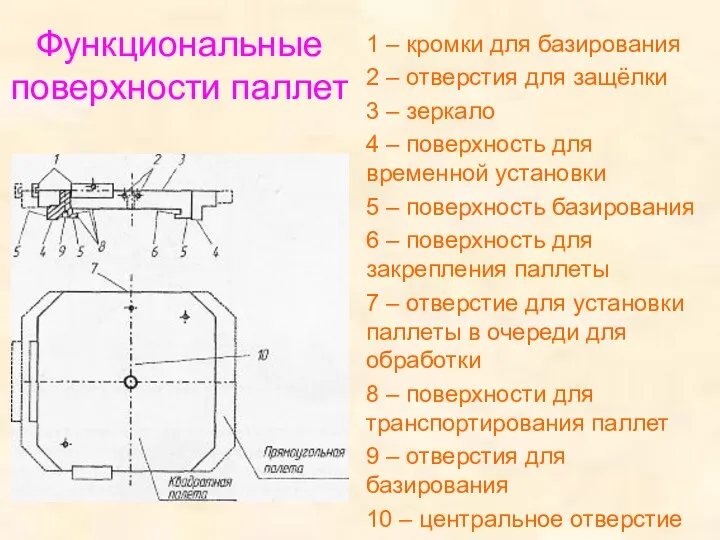
Функциональные поверхности паллет
1 – кромки для базирования
2 – отверстия для защёлки
3
Функциональные поверхности паллет
1 – кромки для базирования
2 – отверстия для защёлки
3
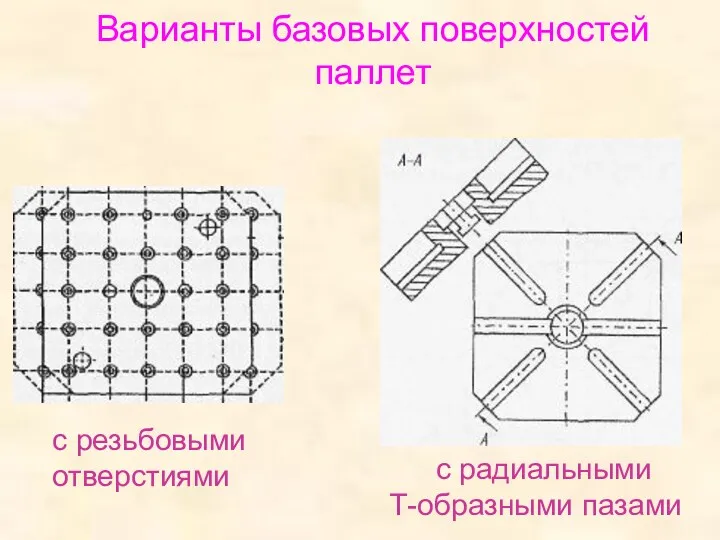
Варианты базовых поверхностей паллет
с резьбовыми отверстиями
с радиальными
Т-образными пазами
Варианты базовых поверхностей паллет
с резьбовыми отверстиями
с радиальными
Т-образными пазами

Станочная паллета
Станочная паллета
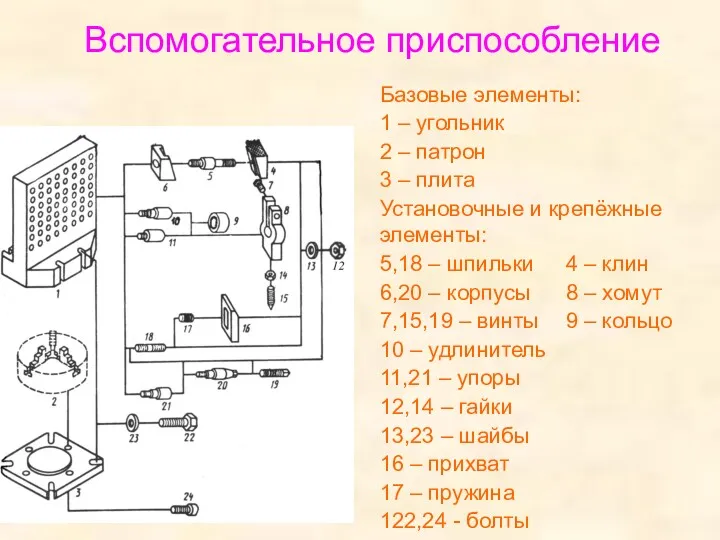
Вспомогательное приспособление
Базовые элементы:
1 – угольник
2 – патрон
3 – плита
Установочные и крепёжные
Вспомогательное приспособление
Базовые элементы:
1 – угольник
2 – патрон
3 – плита
Установочные и крепёжные
Проектирование ГПМ для обработки корпусных деталей
1. Технологическое оборудование.
2. Загрузка/выгрузка деталей.
3. Компоновка
Проектирование ГПМ для обработки корпусных деталей
1. Технологическое оборудование.
2. Загрузка/выгрузка деталей.
3. Компоновка
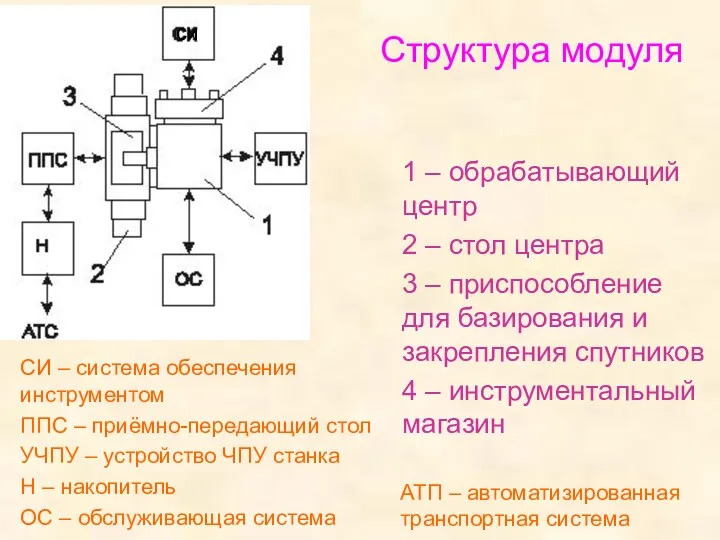
Структура модуля
1 – обрабатывающий центр
2 – стол центра
3 – приспособление для
Структура модуля
1 – обрабатывающий центр
2 – стол центра
3 – приспособление для
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
Локальные накопители:
1) накопитель спутников
2) спутник
3) позиция загрузки/разгрузки станка
4) позиция загрузки/разгрузки накопителя
5)
Локальные накопители:
1) накопитель спутников
2) спутник
3) позиция загрузки/разгрузки станка
4) позиция загрузки/разгрузки накопителя
5)
Позиционирование груза
1 – платформа
2 – стойки приёмной позиции накопителя
3 – центрирующие
Позиционирование груза
1 – платформа
2 – стойки приёмной позиции накопителя
3 – центрирующие
Штриховые коды ISO
Штриховые коды ISO
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
5. Загрузка спутников.
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
5. Загрузка спутников.
Загрузка спутника
1 – шпиндель станка
2 – оправка
3 – кронштейн спутника
4 –
Загрузка спутника
1 – шпиндель станка
2 – оправка
3 – кронштейн спутника
4 –

Приёмо-передающий стол
1 – пульт управления
2 – промежуточный кронштейн
3 – роликовые направляющие
4
Приёмо-передающий стол
1 – пульт управления
2 – промежуточный кронштейн
3 – роликовые направляющие
4
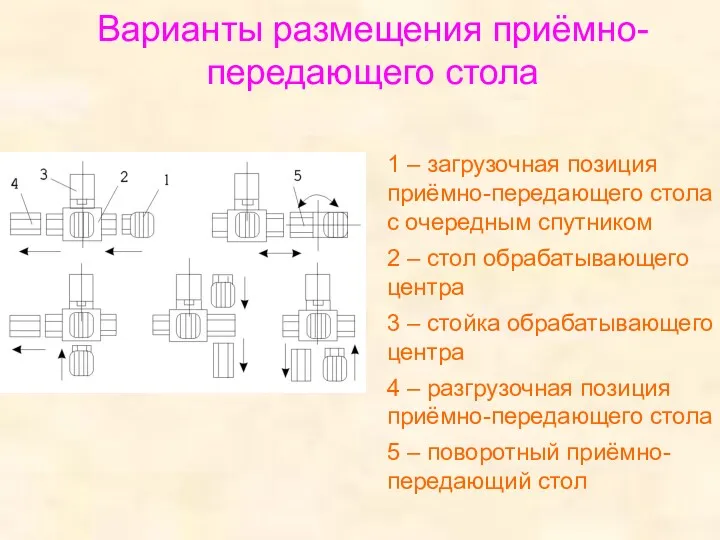
Варианты размещения приёмно-передающего стола
1 – загрузочная позиция приёмно-передающего стола с очередным
Варианты размещения приёмно-передающего стола
1 – загрузочная позиция приёмно-передающего стола с очередным
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
5. Загрузка спутников.
6. Замена инструмента.
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
5. Загрузка спутников.
6. Замена инструмента.
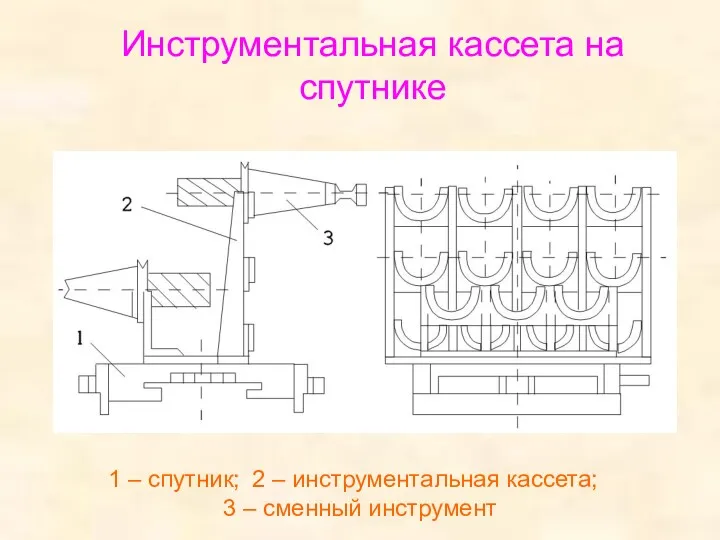
Инструментальная кассета на спутнике
1 – спутник; 2 – инструментальная кассета;
3 – сменный
Инструментальная кассета на спутнике
1 – спутник; 2 – инструментальная кассета; 3 – сменный

1 – внешний инструментальный магазин; 2 – робот-автооператор; 3 – инструмент
1 – внешний инструментальный магазин; 2 – робот-автооператор; 3 – инструмент

1 – робокар; 2 – робот; 3 – инструментальная стойка;
4
1 – робокар; 2 – робот; 3 – инструментальная стойка; 4
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
5. Загрузка спутников.
6. Замена инструмента.
7.
Проектирование ГПМ для обработки корпусных деталей
4. Накопители.
5. Загрузка спутников.
6. Замена инструмента.
7.
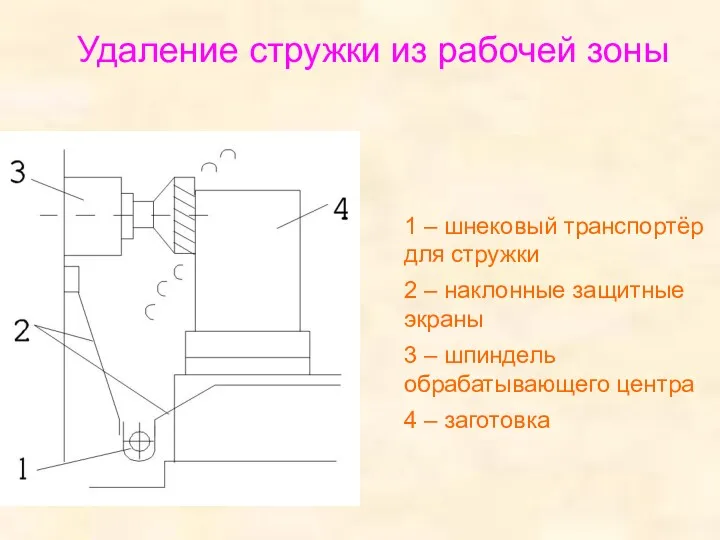
Удаление стружки из рабочей зоны
1 – шнековый транспортёр для стружки
2 –
Удаление стружки из рабочей зоны
1 – шнековый транспортёр для стружки
2 –
 Линейные антенные решетки
Линейные антенные решетки Энергия электрического поля. Тема 6
Энергия электрического поля. Тема 6 Элементы гемодинамики
Элементы гемодинамики Метрология. Допуски и посадки шпоночных и шлицевых соединений
Метрология. Допуски и посадки шпоночных и шлицевых соединений Динамика механической системы
Динамика механической системы тепловые явления в юрте
тепловые явления в юрте Силовий трансформатор ЧС-4
Силовий трансформатор ЧС-4 Особливості будови систем та механізмів автомобіля ГАЗ-66
Особливості будови систем та механізмів автомобіля ГАЗ-66 Введение. Общие сведения о машинах и механизмах
Введение. Общие сведения о машинах и механизмах Зубчатые передачи
Зубчатые передачи Теоретическая механика. Статика абсолютно твердого тела
Теоретическая механика. Статика абсолютно твердого тела Diesel and petrol power
Diesel and petrol power Буксирное устройство судна и его техническая эксплуатация
Буксирное устройство судна и его техническая эксплуатация Пневмотранспорт, виды и применение. Достоинства и недостатки. Тема 14
Пневмотранспорт, виды и применение. Достоинства и недостатки. Тема 14 Методическая разработка для урока по теме Поперечность световых волн.
Методическая разработка для урока по теме Поперечность световых волн. Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256
Разборка и сборка тормозных колодок автобуса ЛИАЗ-5256 Блок - разновидность простого механизма
Блок - разновидность простого механизма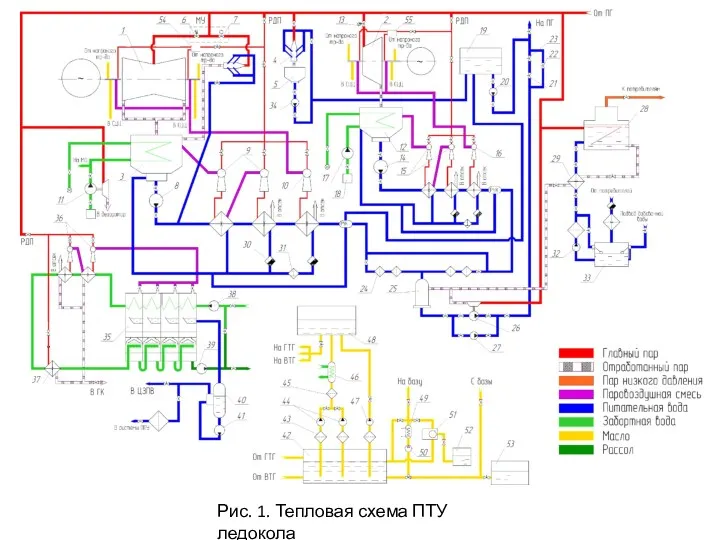 Системы ПТУ 2
Системы ПТУ 2 Гидродинамика. Поток жидкости и его основные понятия
Гидродинамика. Поток жидкости и его основные понятия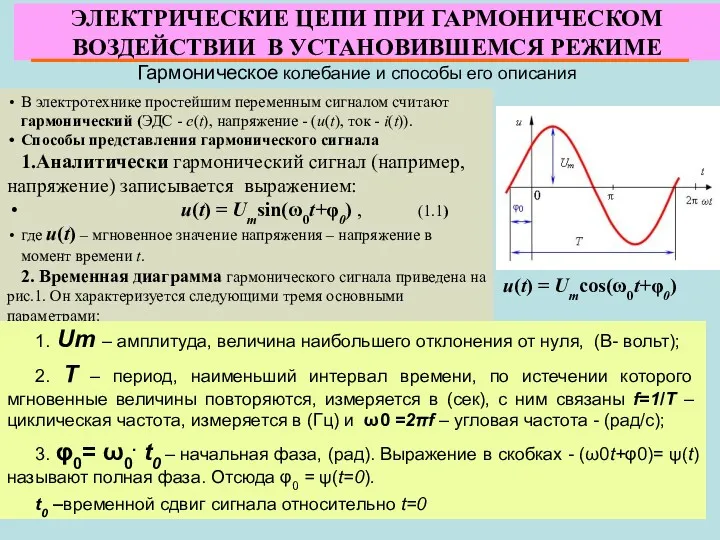 Электрические цепи при гармоническом воздействии в установившемся режиме
Электрические цепи при гармоническом воздействии в установившемся режиме Уравнение Менделеева - Клапейрона
Уравнение Менделеева - Клапейрона Урок по физике в 7классе на тему Плотность вещества. Решение задач
Урок по физике в 7классе на тему Плотность вещества. Решение задач Tiristor GTO
Tiristor GTO Электротехника. Резонанс в электрических цепях. (Лекция 9)
Электротехника. Резонанс в электрических цепях. (Лекция 9) Измерение параметров инфракрасного и терагерцового излучения ч.2 Схемы измерения параметров
Измерение параметров инфракрасного и терагерцового излучения ч.2 Схемы измерения параметров Спектры. Виды спектров
Спектры. Виды спектров Инструментальные методы анализа
Инструментальные методы анализа Реализация проблемного метода обучения на уроках физики с помощью интерактивных компьютерных моделей
Реализация проблемного метода обучения на уроках физики с помощью интерактивных компьютерных моделей