- Теоретическая механика. Статика абсолютно твердого тела

Содержание
- 2. Литература 1. Яблонский А.А. Курс теоретической механики. Ч.1. М.: Высшая школа. 1977 г. 368 с. 2.
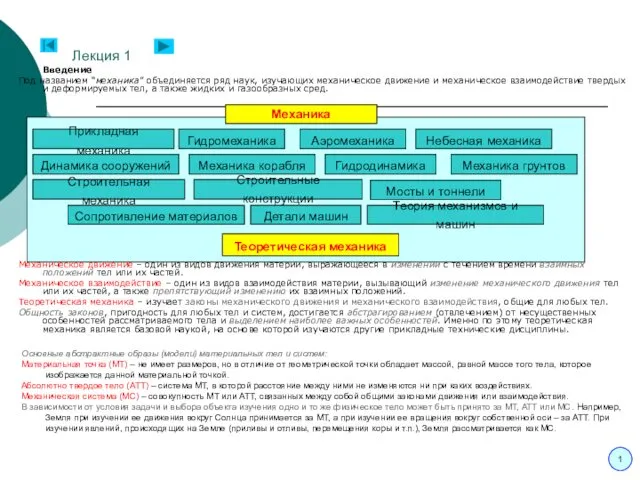
- 3. Лекция 1 Введение Под названием “механика” объединяется ряд наук, изучающих механическое движение и механическое взаимодействие твердых
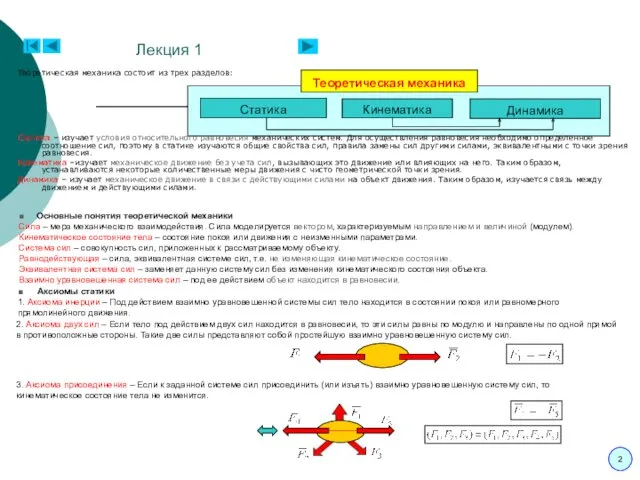
- 4. Лекция 1 Теоретическая механика состоит из трех разделов: Статика – изучает условия относительного равновесия механических систем.
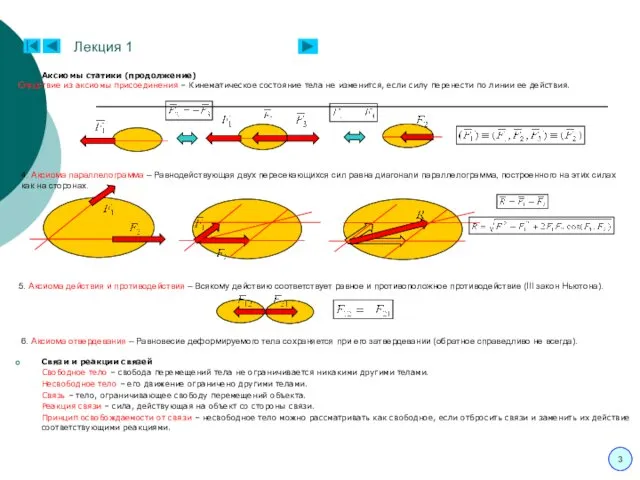
- 5. Лекция 1 Аксиомы статики (продолжение) Следствие из аксиомы присоединения – Кинематическое состояние тела не изменится, если
- 6. Лекция 1 Связи и реакции связей (продолжение) Виды связей и их реакции: 1. Нить, шарнирный стержень:
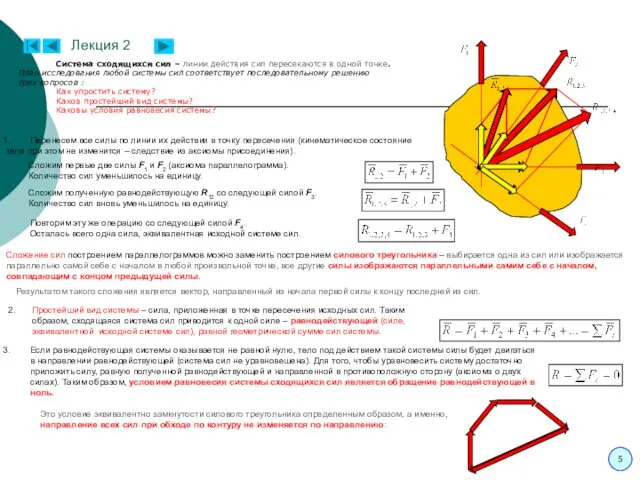
- 7. Система сходящихся сил – линии действия сил пересекаются в одной точке. План исследования любой системы сил
- 9. Скачать презентацию
Литература
1. Яблонский А.А. Курс теоретической механики. Ч.1. М.: Высшая школа. 1977
Литература
1. Яблонский А.А. Курс теоретической механики. Ч.1. М.: Высшая школа. 1977
Лекция 1
Введение
Под названием “механика” объединяется ряд наук, изучающих механическое движение и
Лекция 1
Введение
Под названием “механика” объединяется ряд наук, изучающих механическое движение и
Лекция 1
Теоретическая механика состоит из трех разделов:
Статика – изучает условия относительного
Лекция 1
Теоретическая механика состоит из трех разделов:
Статика – изучает условия относительного
Лекция 1
Аксиомы статики (продолжение)
Следствие из аксиомы присоединения – Кинематическое состояние тела
Лекция 1
Аксиомы статики (продолжение)
Следствие из аксиомы присоединения – Кинематическое состояние тела
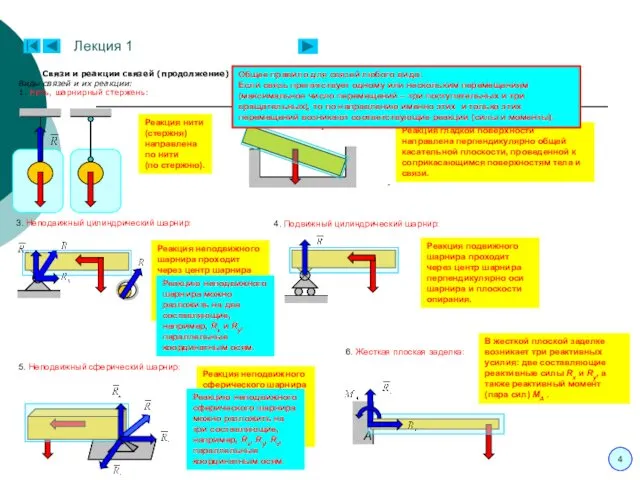
Лекция 1
Связи и реакции связей (продолжение)
Виды связей и их реакции:
1. Нить,
Лекция 1
Связи и реакции связей (продолжение)
Виды связей и их реакции:
1. Нить,
 Устройство, техническое обслуживание и ремонт рулевого управления трактора
Устройство, техническое обслуживание и ремонт рулевого управления трактора 11kl-06_02_24_Kvantovaya_fizika_Fotoeffekt
11kl-06_02_24_Kvantovaya_fizika_Fotoeffekt 1. Mechanika I
1. Mechanika I Ядерный реактор ВВЭР-1000
Ядерный реактор ВВЭР-1000 Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода зарядов. (8 класс)
Электризация тел при соприкосновении. Взаимодействие заряженных тел. Два рода зарядов. (8 класс) Реактивное движение. Физический диктант
Реактивное движение. Физический диктант Фізичні основи механіки. Лекція №1
Фізичні основи механіки. Лекція №1 Магнитное поле. Магнитные линии.
Магнитное поле. Магнитные линии. Закон Ома для полной цепи
Закон Ома для полной цепи Интерференция
Интерференция Система зажигания
Система зажигания Лекция 5. Динамика материальной системы. Динамика тела переменной массы
Лекция 5. Динамика материальной системы. Динамика тела переменной массы Дисперсные системы. Лиофобные дисперсные системы (часть 1)
Дисперсные системы. Лиофобные дисперсные системы (часть 1) Электроизмерительные приборы
Электроизмерительные приборы Компрессоры. Общие положения
Компрессоры. Общие положения Жарық көздері. Жарық жылдамдығы
Жарық көздері. Жарық жылдамдығы Электромагнитные колебания. Раздел 8
Электромагнитные колебания. Раздел 8 Обобщающий урок в 8 классе Оптические явления
Обобщающий урок в 8 классе Оптические явления Основы теории двухполюсников. (Лекция 5)
Основы теории двухполюсников. (Лекция 5) Резистор, конденсатор, катушка индуктивности в цепи переменного тока
Резистор, конденсатор, катушка индуктивности в цепи переменного тока Лампа накаливания (физика, 8 класс)
Лампа накаливания (физика, 8 класс) Презентация к уроку в 9 классе на тему: Реактивное движение
Презентация к уроку в 9 классе на тему: Реактивное движение Частота и период обращения
Частота и период обращения Волновая и квантовая оптика
Волновая и квантовая оптика лабораторная работа измерение плотности твердого тела
лабораторная работа измерение плотности твердого тела Прямолинейное равномерное и равнопеременное движение. Тест
Прямолинейное равномерное и равнопеременное движение. Тест Параллельное и последовательное соединения проводников. Урок–закрепление в 8 классе
Параллельное и последовательное соединения проводников. Урок–закрепление в 8 классе Магнитное поле в веществе. Система уравнений Максвелла. Тема 18
Магнитное поле в веществе. Система уравнений Максвелла. Тема 18