- Фізичні основи механіки. Лекція №1

Содержание
- 2. Лекція №1. Вступ до механіки. Елементи кінематики Предмет механіки. Класична, релятивістська та квантова механіки Фізичні моделі
- 3. 1. Предмет механіки. Механіка – це розділ фізики, який вивчає найбільш просту і найбільш загальну форму
- 4. Під механічним рухом тіла розуміють зміну положення тіла (або його частин) в просторі і часі по
- 5. Механіку поділяють на три частини, це: кінематика – вивчає рух тіл без виявлення причин, що його
- 6. 2. Класична, релятивістська та квантова механіки. В залежності від швидкості і розмірів тіл, рух яких вивчають,
- 7. 3. Фізичні моделі механіки Основним принципом сучасної фізики є принцип моделювання. Модель – це абстрактний об’єкт,
- 8. Для описання механічного руху та розв’язання основної задачі кінематики вводять такі основні фізичні моделі та поняття:
- 9. 4. Простір та час. Системи відліку. Для фізики та інших природничих наук поняття простору та часу
- 10. В класичній механіці, за концепцією І. Ньютона, поняття простору та часу мають абсолютний характер, незалежний від
- 11. З розвитком науки змінюються уявлення про простір і час. Теорія відносності А. Ейнштейна привела до заміни
- 12. Оскільки рух тіл відбувається у просторі і у часі, то для його описання необхідно знати, в
- 13. 5. Переміщення, шлях. Рівняння руху матеріальної точки. При вивченні руху тіл, найбільш часто використовують декартову прямокутну
- 14. Положення точки у просторі в декартовій системі координат визначають трьома координатами x, y, z або радіус-вектором
- 15. Рух точки в просторі описують рівнянням руху, характеризують переміщенням, швидкістю і прискоренням. Основною задачею кінематики є
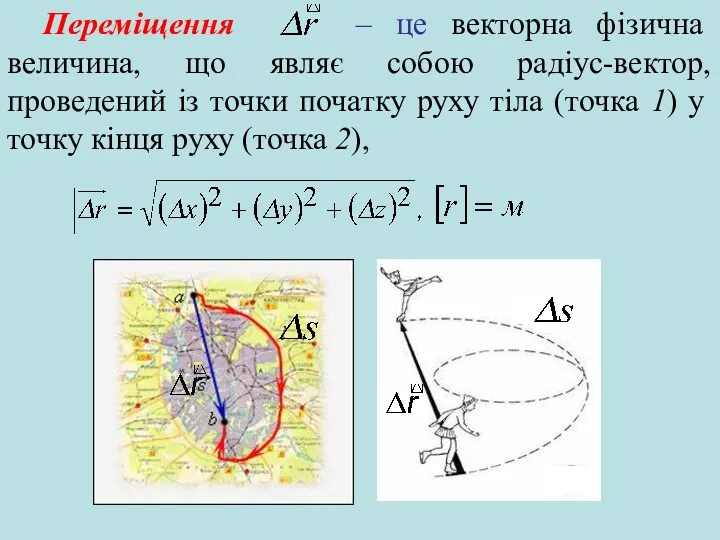
- 16. Переміщення – це векторна фізична величина, що являє собою радіус-вектор, проведений із точки початку руху тіла
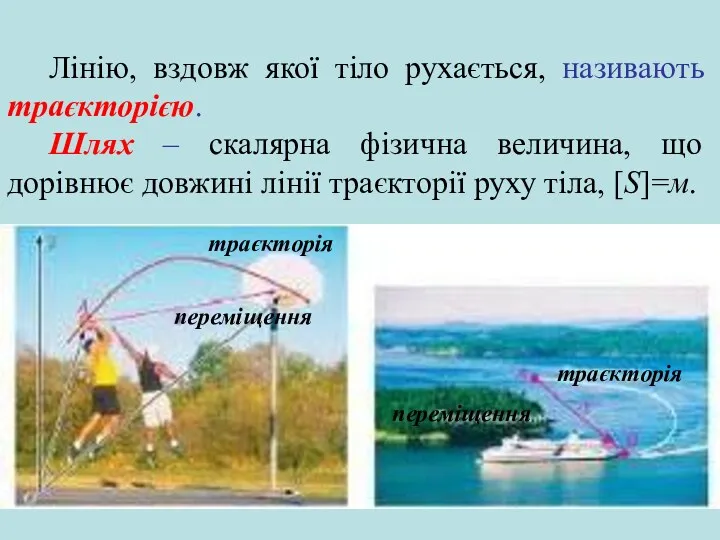
- 17. Лінію, вздовж якої тіло рухається, називають траєкторією. Шлях – скалярна фізична величина, що дорівнює довжині лінії
- 18. 6. Швидкість та прискорення Для характеристики інтенсивності зміни тілом свого положення у просторі з часом вводять
- 19. Якщо визначити швидкість у даний момент часу, тобто взяти границю від при Δt→0, то будемо мати
- 20. Миттєвою швидкістю називають векторну фізичну величину, що чисельно дорівнює зміні переміщення з часом: У випадку, коли
- 22. Для характеристики інтенсивності зміни швид-кості тіла з часом вводять поняття прискорення. Прискорення – це векторна фізична
- 23. Знаючи кінематичне рівняння руху, шляхом диференціювання за часом знайти швидкість і прискорення в будь-який момент часу
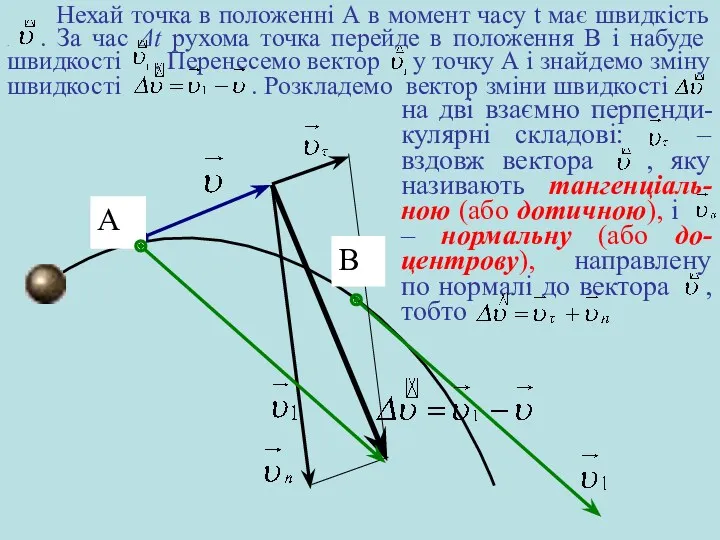
- 24. Розглянемо матеріальну точку, що рухається вздовж довільної траєкторії зі змінною швидкістю. 7. Нормальне і тангенціальне прискорення
- 25. A B
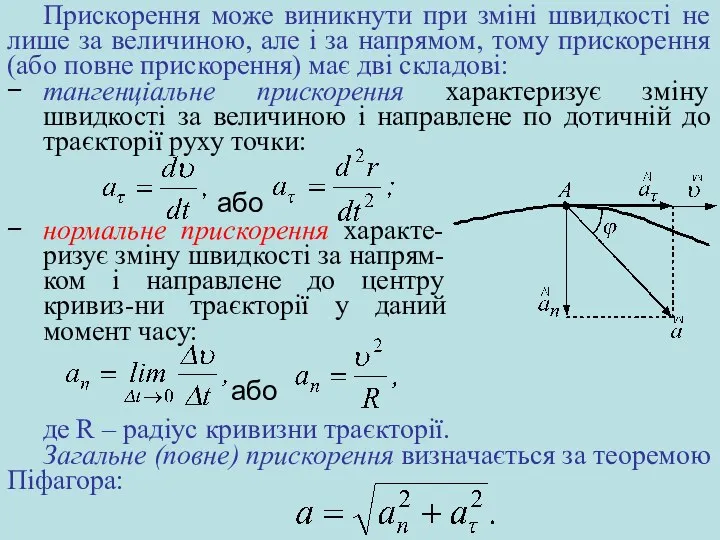
- 26. Прискорення може виникнути при зміні швидкості не лише за величиною, але і за напрямом, тому прискорення
- 27. Розрізняють такі види руху: 1) прямолінійний рівномірний рух: υ=const
- 28. 2) прямолінійний рівнозмінний (рівноприско-рений або рівносповільнений) рух: aτ υ
- 29. 3) рівномірний рух по колу: R a an aτ υ
- 30. 4) криволінійний рівнозмінний рух : a aτ an r r r aτ an a Будь-яку криволінійну
- 31. 8. Поступальний та обертальний рухи. Рух по колу. Поступальний рух – рух абсолютно твер-дого тіла (АТТ),
- 32. Обертальний рух – рух абсолютно твердого тіла (АТТ), при якому всі точки тіла описують траєкторії у
- 34. Положення в просторі абсолютно твердого тіла, що здійснює обертальний рух, визначають кутовим переміщенням Δφ – значенням
- 35. Кінематичною характеристикою напрямку і швидкості обертання тіла є кутова швидкість. Кутовою швидкістю називають векторну величину, що
- 39. Величини, що описують лінійні і кутові характеристики руху пов’язані між собою формулами зв’язку:
- 40. Періодом обертання називають час, протягом якого тіло здійснює один повний оберт Оскільки тіло, що рівномірно обертається
- 41. Поширеною різновидністю криволінійного руху є рух точки по колу. При обертанні кількох жорстко зв’язаних точок, наприклад
- 43. Скачать презентацию
Лекція №1. Вступ до механіки. Елементи кінематики
Предмет механіки.
Класична, релятивістська та квантова
Лекція №1. Вступ до механіки. Елементи кінематики
Предмет механіки.
Класична, релятивістська та квантова
1. Предмет механіки.
Механіка – це розділ фізики, який вивчає найбільш
1. Предмет механіки.
Механіка – це розділ фізики, який вивчає найбільш
Під механічним рухом тіла розуміють зміну положення тіла (або його частин)
Під механічним рухом тіла розуміють зміну положення тіла (або його частин)

Механіку поділяють на три частини, це:
кінематика – вивчає рух тіл без
Механіку поділяють на три частини, це:
кінематика – вивчає рух тіл без
2. Класична, релятивістська та квантова механіки.
В залежності від швидкості і
2. Класична, релятивістська та квантова механіки.
В залежності від швидкості і
3. Фізичні моделі механіки
Основним принципом сучасної фізики є принцип моделювання.
Модель
3. Фізичні моделі механіки
Основним принципом сучасної фізики є принцип моделювання.
Модель
Для описання механічного руху та розв’язання основної задачі кінематики вводять такі
Для описання механічного руху та розв’язання основної задачі кінематики вводять такі
4. Простір та час. Системи відліку.
Для фізики та інших природничих
4. Простір та час. Системи відліку.
Для фізики та інших природничих
В класичній механіці, за концепцією І. Ньютона, поняття простору та часу
В класичній механіці, за концепцією І. Ньютона, поняття простору та часу
З розвитком науки змінюються уявлення про простір і час.
Теорія відносності
З розвитком науки змінюються уявлення про простір і час.
Теорія відносності
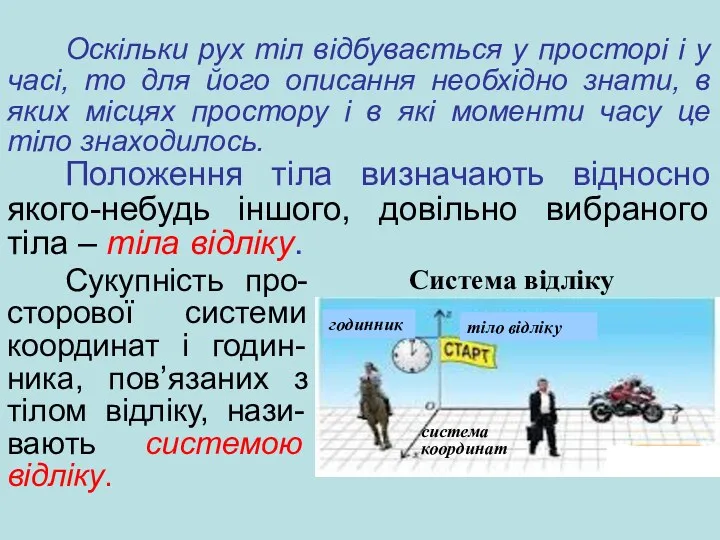
Оскільки рух тіл відбувається у просторі і у часі, то для
Оскільки рух тіл відбувається у просторі і у часі, то для
5. Переміщення, шлях. Рівняння руху матеріальної точки.
При вивченні руху тіл,
5. Переміщення, шлях. Рівняння руху матеріальної точки.
При вивченні руху тіл,
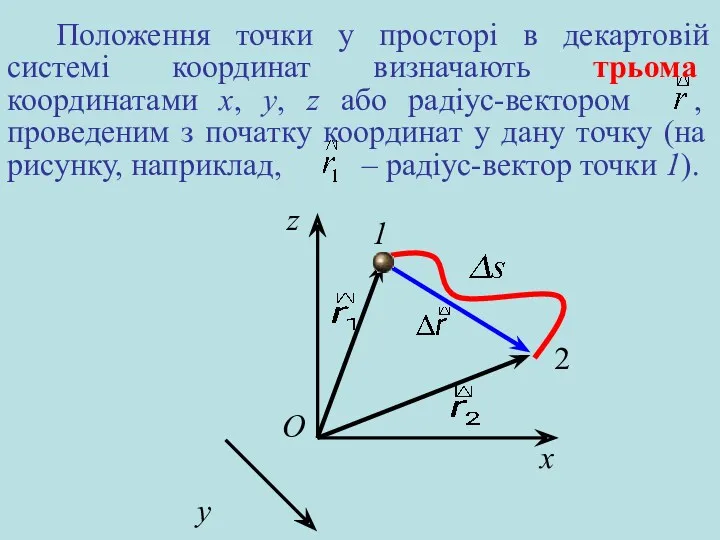
Положення точки у просторі в декартовій системі координат визначають трьома координатами
Положення точки у просторі в декартовій системі координат визначають трьома координатами
Рух точки в просторі описують рівнянням руху, характеризують переміщенням, швидкістю і
Рух точки в просторі описують рівнянням руху, характеризують переміщенням, швидкістю і
Переміщення – це векторна фізична величина, що являє собою радіус-вектор, проведений
Переміщення – це векторна фізична величина, що являє собою радіус-вектор, проведений
Лінію, вздовж якої тіло рухається, називають траєкторією.
Шлях – скалярна фізична
Лінію, вздовж якої тіло рухається, називають траєкторією.
Шлях – скалярна фізична
6. Швидкість та прискорення
Для характеристики інтенсивності зміни тілом свого положення
6. Швидкість та прискорення
Для характеристики інтенсивності зміни тілом свого положення
Якщо визначити швидкість у даний момент часу, тобто взяти границю від
Якщо визначити швидкість у даний момент часу, тобто взяти границю від
Миттєвою швидкістю називають векторну фізичну величину, що чисельно дорівнює зміні переміщення
Миттєвою швидкістю називають векторну фізичну величину, що чисельно дорівнює зміні переміщення

Для характеристики інтенсивності зміни швид-кості тіла з часом вводять поняття прискорення.
Для характеристики інтенсивності зміни швид-кості тіла з часом вводять поняття прискорення.
Знаючи кінематичне рівняння руху, шляхом диференціювання за часом знайти швидкість і
Знаючи кінематичне рівняння руху, шляхом диференціювання за часом знайти швидкість і
Розглянемо матеріальну точку, що рухається вздовж довільної траєкторії зі змінною швидкістю.
Розглянемо матеріальну точку, що рухається вздовж довільної траєкторії зі змінною швидкістю.
A
B
A
B
Прискорення може виникнути при зміні швидкості не лише за величиною, але
Прискорення може виникнути при зміні швидкості не лише за величиною, але
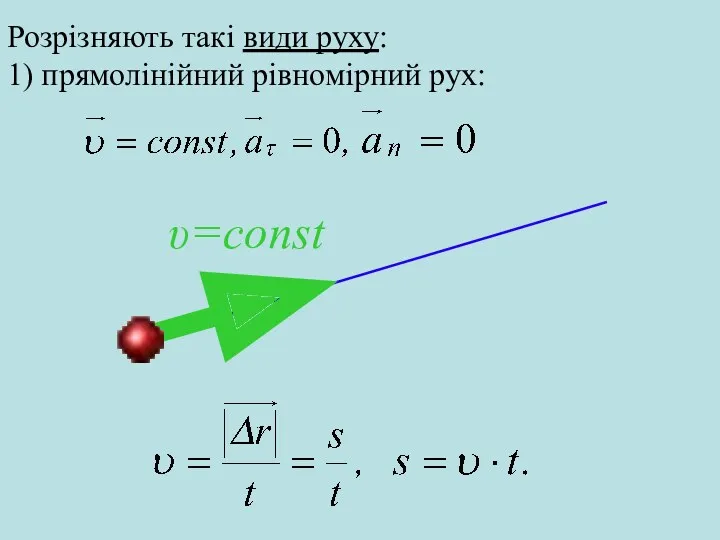
Розрізняють такі види руху:
1) прямолінійний рівномірний рух:
υ=const
Розрізняють такі види руху:
1) прямолінійний рівномірний рух:
υ=const
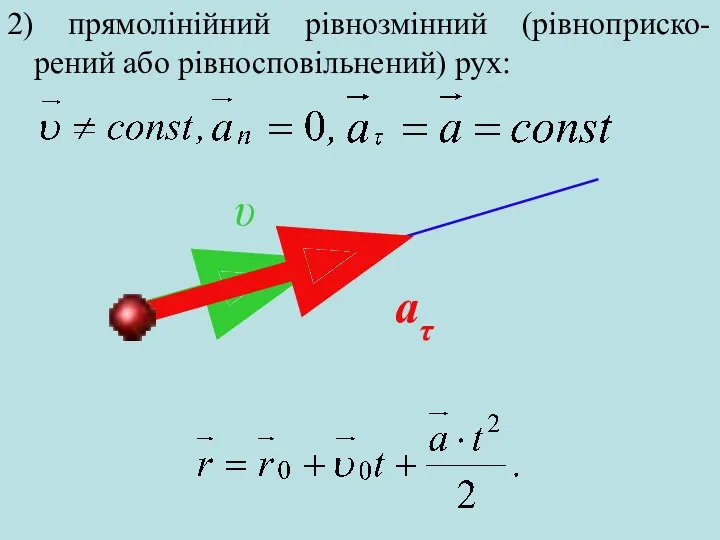
2) прямолінійний рівнозмінний (рівноприско-рений або рівносповільнений) рух:
aτ
υ
2) прямолінійний рівнозмінний (рівноприско-рений або рівносповільнений) рух:
aτ
υ
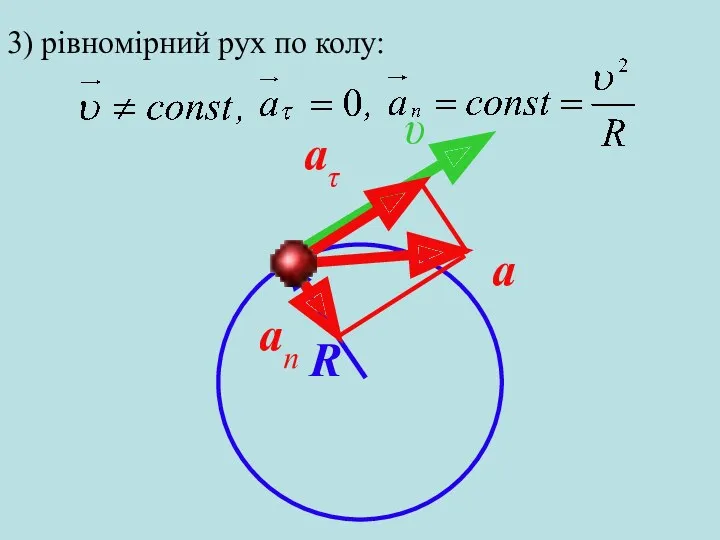
3) рівномірний рух по колу:
R
a
an
aτ
υ
3) рівномірний рух по колу:
R
a
an
aτ
υ
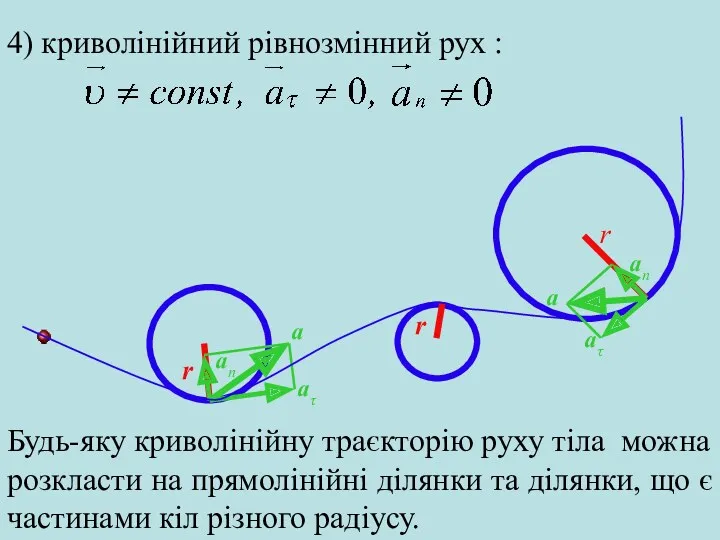
4) криволінійний рівнозмінний рух :
a
aτ
an
r
r
r
aτ
an
a
Будь-яку криволінійну траєкторію руху тіла можна розкласти
4) криволінійний рівнозмінний рух :
a
aτ
an
r
r
r
aτ
an
a
Будь-яку криволінійну траєкторію руху тіла можна розкласти
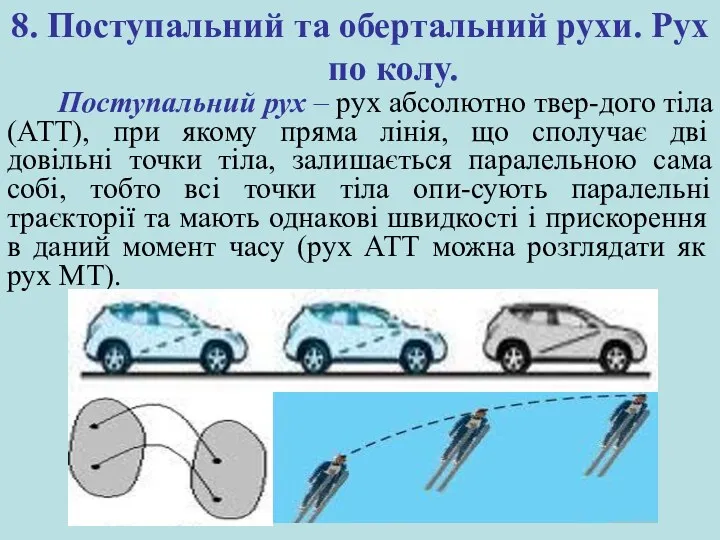
8. Поступальний та обертальний рухи. Рух по колу.
Поступальний рух –
8. Поступальний та обертальний рухи. Рух по колу.
Поступальний рух –
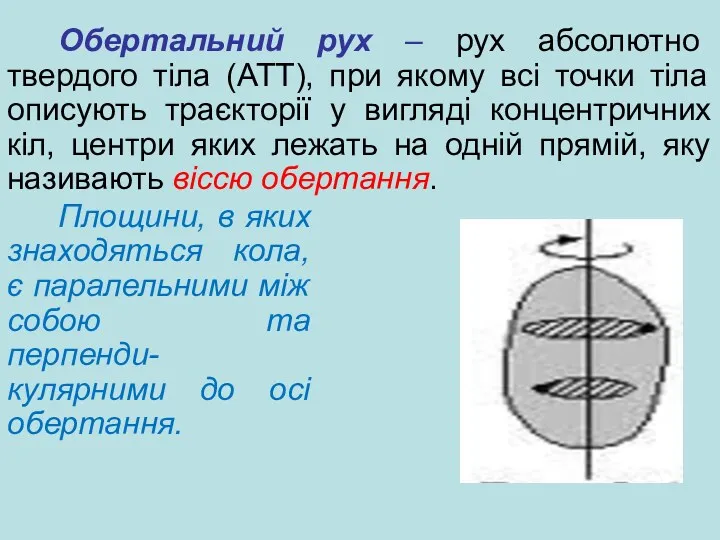
Обертальний рух – рух абсолютно твердого тіла (АТТ), при якому всі
Обертальний рух – рух абсолютно твердого тіла (АТТ), при якому всі


Положення в просторі абсолютно твердого тіла, що здійснює обертальний рух, визначають
Положення в просторі абсолютно твердого тіла, що здійснює обертальний рух, визначають
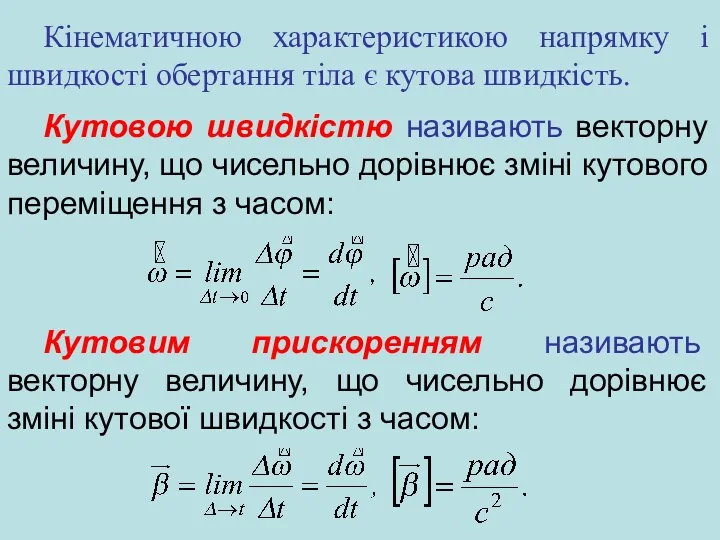
Кінематичною характеристикою напрямку і швидкості обертання тіла є кутова швидкість.
Кутовою швидкістю
Кінематичною характеристикою напрямку і швидкості обертання тіла є кутова швидкість.
Кутовою швидкістю

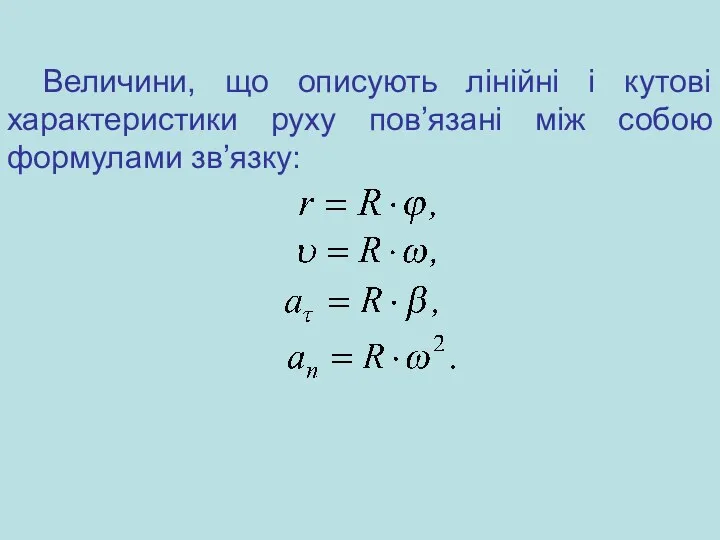
Величини, що описують лінійні і кутові характеристики руху пов’язані між собою
Величини, що описують лінійні і кутові характеристики руху пов’язані між собою
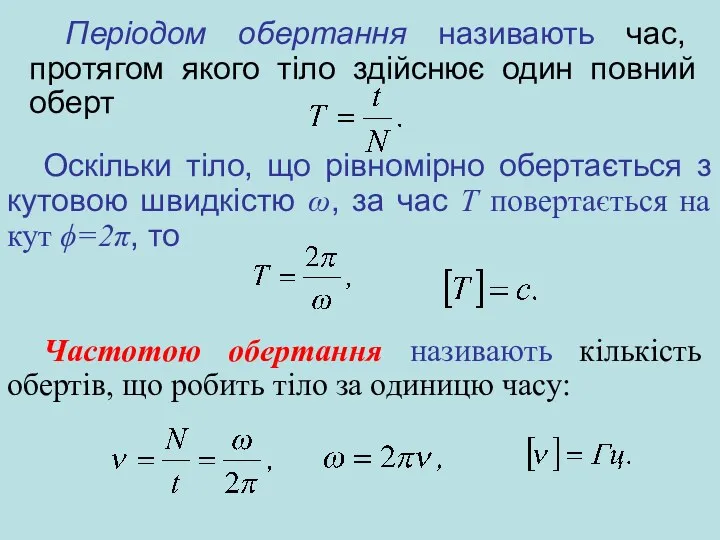
Періодом обертання називають час, протягом якого тіло здійснює один повний оберт
Періодом обертання називають час, протягом якого тіло здійснює один повний оберт
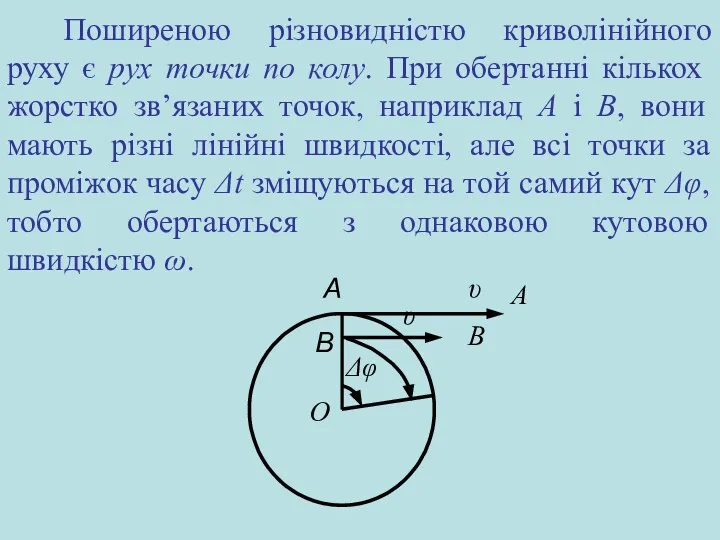
Поширеною різновидністю криволінійного руху є рух точки по колу. При обертанні
Поширеною різновидністю криволінійного руху є рух точки по колу. При обертанні
 Компоновка спеціального електрообладнання БМП-2 в машині
Компоновка спеціального електрообладнання БМП-2 в машині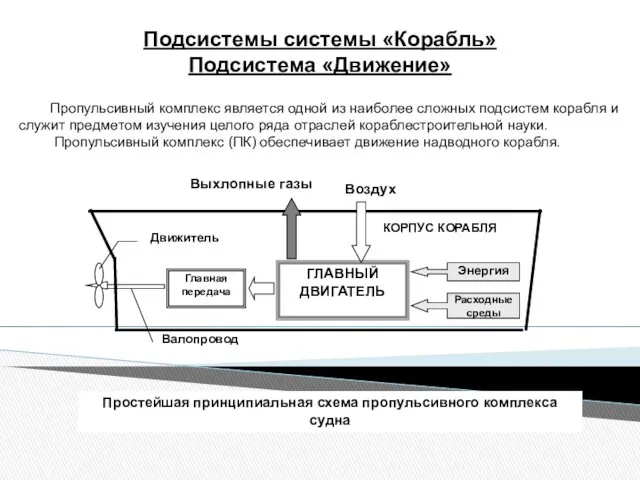 Подсистемы системы Корабль. Подсистема Движение
Подсистемы системы Корабль. Подсистема Движение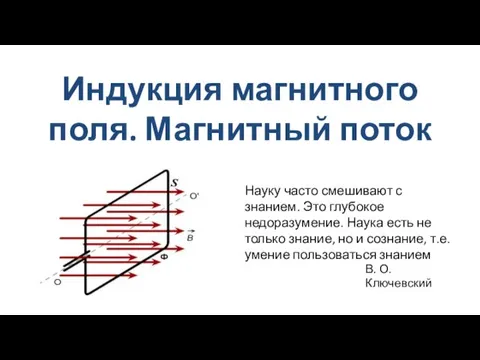 Индукция магнитного поля. Магнитный поток
Индукция магнитного поля. Магнитный поток Спектроскопические методы исследования пищевых продуктов
Спектроскопические методы исследования пищевых продуктов Окружающий мир как иерархическая система
Окружающий мир как иерархическая система Передача давления жидкостями и газами. Закон Паскаля
Передача давления жидкостями и газами. Закон Паскаля Тепловое излучение
Тепловое излучение Секреты физики и олимпийские игры
Секреты физики и олимпийские игры Диэлектрики в электрическом поле
Диэлектрики в электрическом поле Конструирование и управление БПА
Конструирование и управление БПА Упругое рассеяние в центральном поле
Упругое рассеяние в центральном поле Переменный ток
Переменный ток Трансмісія бронетранспортера БТР-80
Трансмісія бронетранспортера БТР-80 Ажырамалы қосылыстар
Ажырамалы қосылыстар Презентация к уроку Постоянные магниты для 8 класса
Презентация к уроку Постоянные магниты для 8 класса внеклассное мероприятие Как сберечь воду и уменьшить ее загрязнение для учащихся 6-7 классов
внеклассное мероприятие Как сберечь воду и уменьшить ее загрязнение для учащихся 6-7 классов Проектно-исследовательская деятельность через интеграцию наук с физикой
Проектно-исследовательская деятельность через интеграцию наук с физикой Общие сведения. Спецификация
Общие сведения. Спецификация Планарные волноводы
Планарные волноводы Mechanical System
Mechanical System Физико-химические основы горения и взрыва
Физико-химические основы горения и взрыва Инерция. Галилео Галилей
Инерция. Галилео Галилей История возникновения спектроскопии
История возникновения спектроскопии Электрический заряд. Закон Кулона. Напряженность поля
Электрический заряд. Закон Кулона. Напряженность поля Цилиндрические и конические зубчатые передачи
Цилиндрические и конические зубчатые передачи Что изучает физика. Некоторые физические термины, наблюдения и опыты
Что изучает физика. Некоторые физические термины, наблюдения и опыты Обозначение физической величины
Обозначение физической величины Учебный курс Термодинамика и теплопередача. Практическое занятие 2
Учебный курс Термодинамика и теплопередача. Практическое занятие 2