- Плоская система произвольно расположенных сил. (Тема 1.4)

Содержание
- 2. Плоская система произвольно расположенных сил - это система, у которой силы расположены в одной плоскости и
- 3. Теорема о параллельном переносе силы (теорема Пуансо) Механическое состояние твёрдого тела не нарушится, если данную силу
- 4. F =F′= F′′ , где F′и F′′ взаимоуравновешенные силы. В результате приведения силы F к точке
- 5. Пример Для определения действия силы F на колесо и подшипники перенесем эту силу параллельно самой себе
- 6. Приведение произвольно расположенных сил к заданному центру Приведением системы сил называется замена её другой системой, эквивалентной
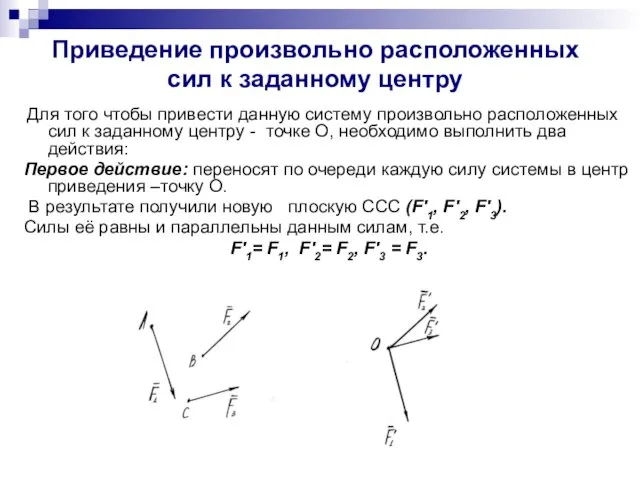
- 7. Приведение произвольно расположенных сил к заданному центру Для того чтобы привести данную систему произвольно расположенных сил
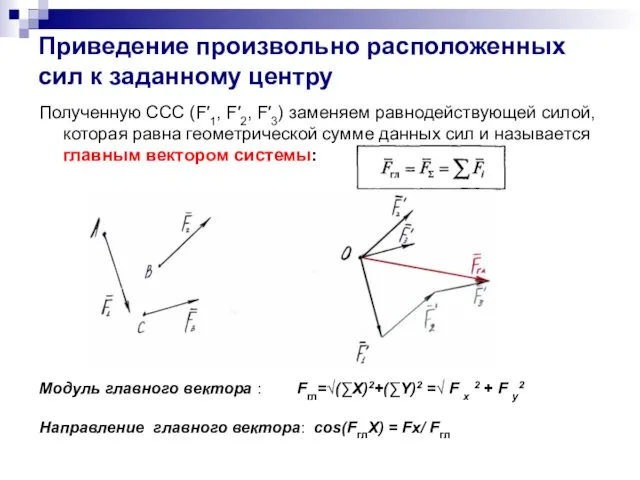
- 8. Приведение произвольно расположенных сил к заданному центру Полученную ССС (F′1, F′2, F′3) заменяем равнодействующей силой, которая
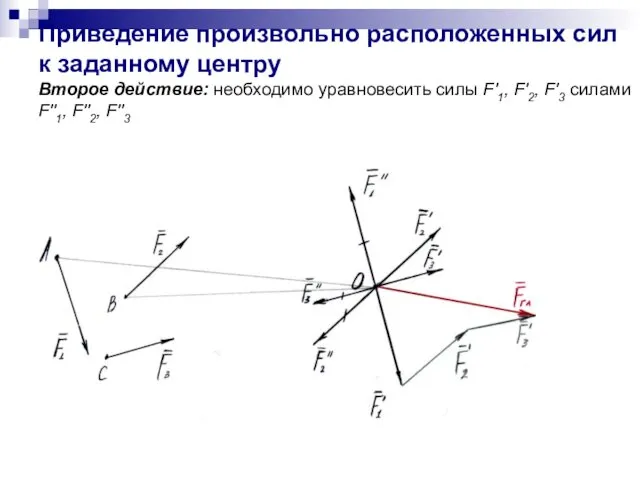
- 9. Приведение произвольно расположенных сил к заданному центру Второе действие: необходимо уравновесить силы F′1, F′2, F′3 силами
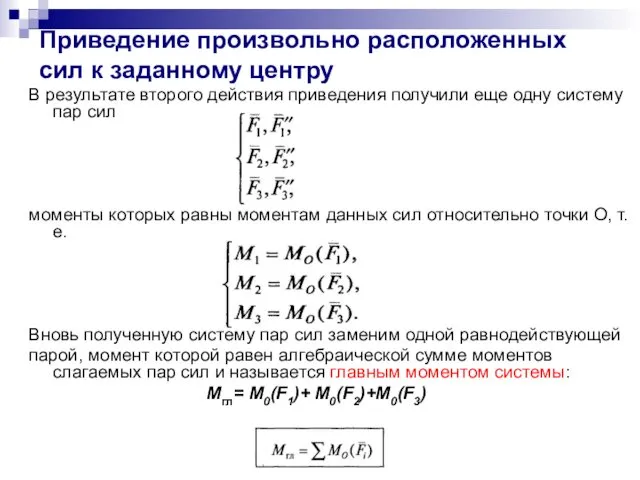
- 10. Приведение произвольно расположенных сил к заданному центру В результате второго действия приведения получили еще одну систему
- 11. Свойства главного вектора и главного момента 1.Модуль и направление главного вектора не зависят от выбора центра
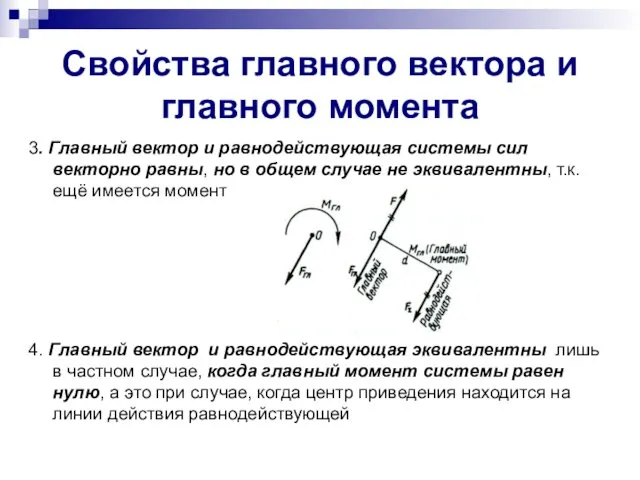
- 12. Свойства главного вектора и главного момента 3. Главный вектор и равнодействующая системы сил векторно равны, но
- 13. Теорема о моменте равнодействующей относительно точки (Теорема Вариньона) Момент равнодействующей силы относительно, какой либо точки, расположенной
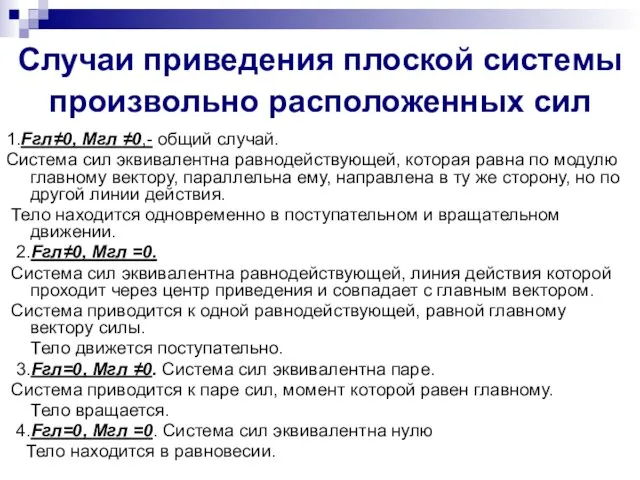
- 14. Случаи приведения плоской системы произвольно расположенных сил 1.Fгл≠0, Мгл ≠0,- общий случай. Система сил эквивалентна равнодействующей,
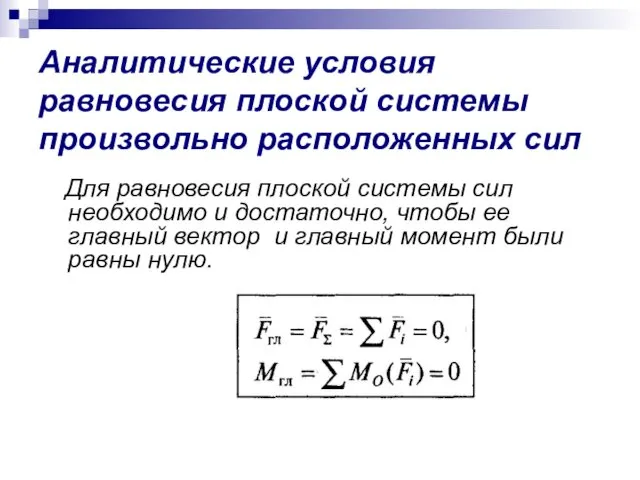
- 15. Аналитические условия равновесия плоской системы произвольно расположенных сил Для равновесия плоской системы сил необходимо и достаточно,
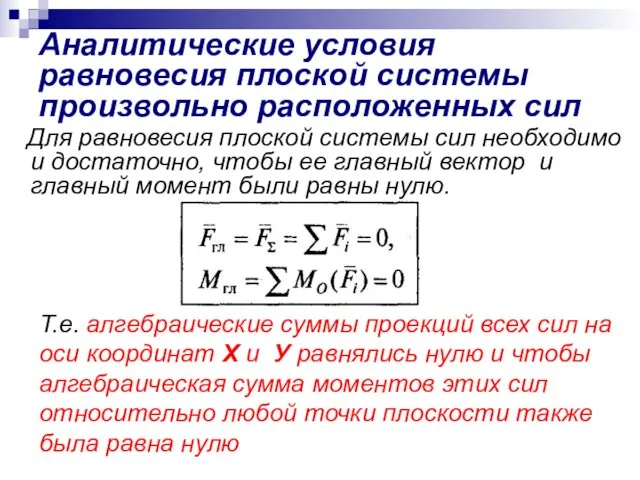
- 16. Аналитические условия равновесия плоской системы произвольно расположенных сил Для равновесия плоской системы сил необходимо и достаточно,
- 18. Скачать презентацию
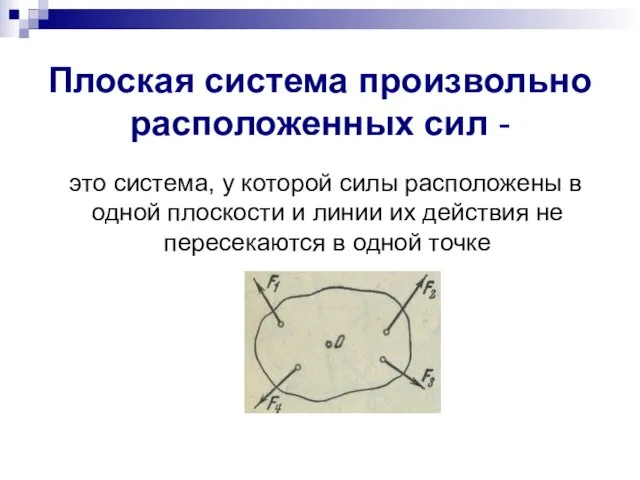
Плоская система произвольно расположенных сил -
это система, у которой силы
Плоская система произвольно расположенных сил -
это система, у которой силы
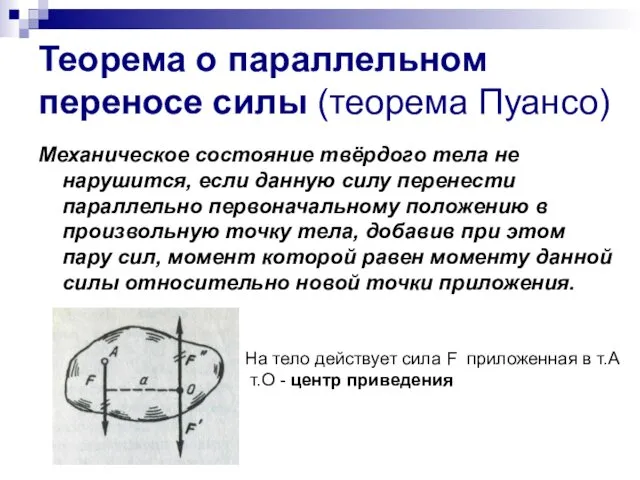
Теорема о параллельном переносе силы (теорема Пуансо)
Механическое состояние твёрдого тела не
Теорема о параллельном переносе силы (теорема Пуансо)
Механическое состояние твёрдого тела не
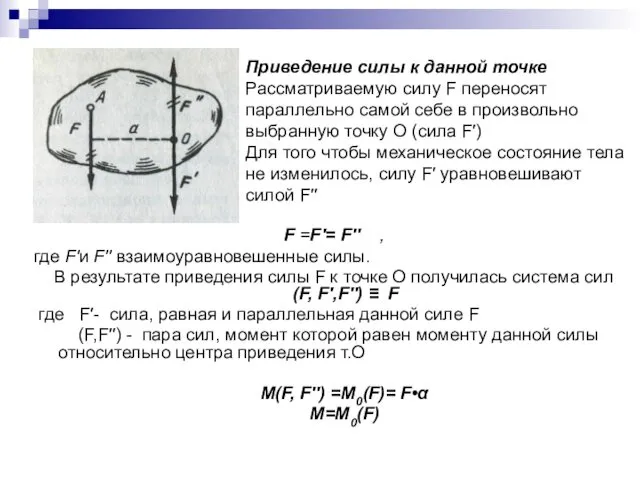
F =F′= F′′ ,
где F′и F′′ взаимоуравновешенные силы.
В результате приведения
F =F′= F′′ ,
где F′и F′′ взаимоуравновешенные силы.
В результате приведения
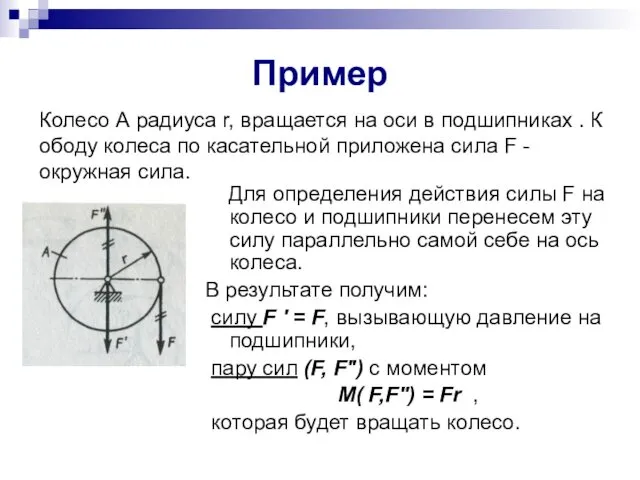
Пример
Для определения действия силы F на колесо и подшипники
Пример
Для определения действия силы F на колесо и подшипники
Приведение произвольно расположенных сил к заданному центру
Приведением системы сил
Приведение произвольно расположенных сил к заданному центру
Приведением системы сил
Приведение произвольно расположенных сил к заданному центру
Для того чтобы привести
Приведение произвольно расположенных сил к заданному центру
Для того чтобы привести
Приведение произвольно расположенных сил к заданному центру
Полученную ССС (F′1, F′2, F′3)
Приведение произвольно расположенных сил к заданному центру
Полученную ССС (F′1, F′2, F′3)
Приведение произвольно расположенных сил к заданному центру
Второе действие: необходимо уравновесить силы
Приведение произвольно расположенных сил к заданному центру Второе действие: необходимо уравновесить силы
Приведение произвольно расположенных сил к заданному центру
В результате второго действия приведения
Приведение произвольно расположенных сил к заданному центру
В результате второго действия приведения
Свойства главного вектора и главного момента
1.Модуль и направление главного вектора
Свойства главного вектора и главного момента
1.Модуль и направление главного вектора
Свойства главного вектора и главного момента
3. Главный вектор и равнодействующая системы
Свойства главного вектора и главного момента
3. Главный вектор и равнодействующая системы
Теорема о моменте равнодействующей относительно точки
(Теорема Вариньона)
Момент равнодействующей силы относительно,
Теорема о моменте равнодействующей относительно точки
(Теорема Вариньона)
Момент равнодействующей силы относительно,
Случаи приведения плоской системы произвольно расположенных сил
1.Fгл≠0, Мгл ≠0,-
Случаи приведения плоской системы произвольно расположенных сил
1.Fгл≠0, Мгл ≠0,-
Аналитические условия равновесия плоской системы
произвольно расположенных сил
Для равновесия плоской
Аналитические условия равновесия плоской системы
произвольно расположенных сил
Для равновесия плоской
Аналитические условия равновесия плоской системы
произвольно расположенных сил
Для равновесия плоской
Аналитические условия равновесия плоской системы
произвольно расположенных сил
Для равновесия плоской
 Температура
Температура Сила. Сила тяжести. Сила - векторная величина
Сила. Сила тяжести. Сила - векторная величина Презентация открытого урока по теме Лазеры
Презентация открытого урока по теме Лазеры Принцип суперпозиции полей
Принцип суперпозиции полей Понятие методологической культуры педагога
Понятие методологической культуры педагога Кремний для солнечной энергетики
Кремний для солнечной энергетики Электрический ток в металлах. Действия электрического тока
Электрический ток в металлах. Действия электрического тока Электризация тел. Два рода электрического заряда
Электризация тел. Два рода электрического заряда КПД теплового двигателя
КПД теплового двигателя Презентация к уроку Введение 7 класс
Презентация к уроку Введение 7 класс Физика будущего
Физика будущего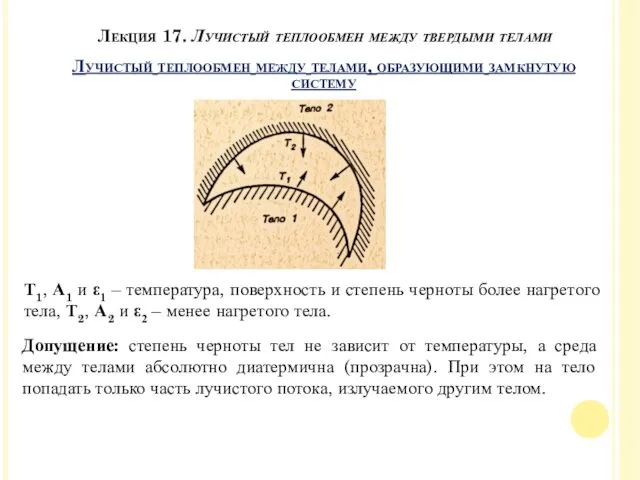 Лучистый теплообмен между телами, образующими замкнутую систему
Лучистый теплообмен между телами, образующими замкнутую систему викторина Юный физик
викторина Юный физик Молекулярно-кинетическая теория (МКТ)
Молекулярно-кинетическая теория (МКТ) Презентация к уроку Диффузия. Движение молекул. (7 класс)
Презентация к уроку Диффузия. Движение молекул. (7 класс) Открытый урок по теме Шкала электромагнитных излучений (11 класс)
Открытый урок по теме Шкала электромагнитных излучений (11 класс) Опыт Эрстеда. Магнитное поле. Конфигурации магнитных полей. Характеристики магнитного поля
Опыт Эрстеда. Магнитное поле. Конфигурации магнитных полей. Характеристики магнитного поля Радіоактивність. Прилад для вимірювання радіоактивності-дозиметр
Радіоактивність. Прилад для вимірювання радіоактивності-дозиметр Колебательный контур. Свободные и вынужденные электромагнитные колебания
Колебательный контур. Свободные и вынужденные электромагнитные колебания Волны. Звуковые волны. Звук
Волны. Звуковые волны. Звук Основные понятия нанотехнологий. Оборудование
Основные понятия нанотехнологий. Оборудование История представлений строения атома
История представлений строения атома Общие теоремы динамики точки
Общие теоремы динамики точки Материя, темная материя, вещество, антивещество
Материя, темная материя, вещество, антивещество внеклассное мероприятие Как сберечь воду и уменьшить ее загрязнение для учащихся 6-7 классов
внеклассное мероприятие Как сберечь воду и уменьшить ее загрязнение для учащихся 6-7 классов Электрический заряд
Электрический заряд игра по физике Звездный час
игра по физике Звездный час Проект “Дизельный двигатель”
Проект “Дизельный двигатель”