- Детали, звенья, кинематические пары, кинематические цепи. Структура механизмов

Содержание
- 2. Части механизмов состоят из деталей, которые являются первич-ным элементом любого устройства. При изучении механизма важно знать
- 3. Рисунок 1
- 4. Кривошип – звено, совершающее полный оборот вокруг неподвижной оси (рисунок 1, а, б, в). Камень кулисы
- 5. Коромысло – звено, совершающее колебательные движения относительно неподвижной оси Кулачок – звено, которое выполнено в виде
- 6. Рисунок 1 Названия рычажным механизмам дают по входному и выходному звеньям. кривошипно-кулисный кривошипно-ползунный кривошипно-коромысловый кулачковый механизм
- 7. Соединение двух звеньев, обеспечивающее определенный харак-тер их относительного движения, называется кинематической парой. Примеры кинематических пар –
- 8. Кинематические пары (КП) классифицируются по следующим признакам: 1.По виду места контакта (места связи) поверхностей звеньев: низшие,
- 9. 3.По способу замыкания (обеспечения контакта звеньев пары): силовое (за счёт действия сил веса или силы упругости
- 10. 4.По числу подвижностей в относительном движении звеньев: одноподвижные двух-, трёх-, четырёх-, пятиподвижные. 5.По числу условий связи,
- 11. Каждая кинематическая пара нала-гает ограничения на относительные дви-жения образующих ее звеньев, назы-ваемые условиями связи или просто
- 12. Исходя из понятия связи, кинематические пары можно классифицировать, определяя их класс К по количеству связей из
- 13. На рисунке 1.2 приведены примеры кинематических пар и их схематические изображения. а) б) в) г) д)
- 14. Кинематические цепи. Подвижность кинематической цепи. ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
- 15. Звенья, соединенные кинематическими парами, называют кинематическими цепями. Кинематические цепи весьма разнообразны. Цепь называют простой, если любое
- 16. Разомкнутой называют цепь, у которой хотя бы одно из звеньев входит только в одну кинематическую пару
- 17. Если кинематическими парами соединяются несколько звеньев, то число пар в таком соединении будет на единицу меньше
- 18. По характеру движения звеньев кинематические цепи делят на плоские (рисунок 1.3а) г) а) Кинематические цепи могут
- 19. Звенья кинематических цепей механизмов должны обладать подвижностью — определенностью движения относительно неподвижной системы координат, связанной со
- 20. Структурные формулы для определения степени подвижности кинематических цепей. ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
- 21. Определить подвижность кинематической цепи визуально можно только для малозвенных механизмов, в которых звенья соединены низшими кинематическими
- 22. Остановив, например, звено 4, что соответствует приданию постоянного значения координате φ4, получим кинематическую цепь с тремя
- 23. Очевидно, что для более сложных кинематических цепей (рисунок 1.3б) визуально определить степень подвижности стано-вится сложнее. Поэтому
- 24. Пусть пространственная кинематическая цепь состоит из n звеньев. Каждое из них обладает шестью степенями свободы, и
- 25. Тогда из этих соображений получим структурные формулы: для пространственной кинематической цепи (формула Сомова—Малышева) (1.2) для плоской
- 26. Следует иметь в виду, что в плоских кинематических цепях выс-шие кинематические пары первого и второго классов
- 27. Впервые закон образования механизмов был сформулирован в 1914 г. русским ученым Леонидом Владимировичем Ассуром применительно к
- 28. В основе структурной теории лежат два понятия: механизм первого класса и структурная группа (группа Ассура). Механизмом
- 29. Структурной группой или группой Ассура называют кинематическую цепь с нулевой степенью подвиж-ности, причем такая группа не
- 30. Структурные группы Ассура 2-го класса второго порядка разных видов
- 32. Скачать презентацию
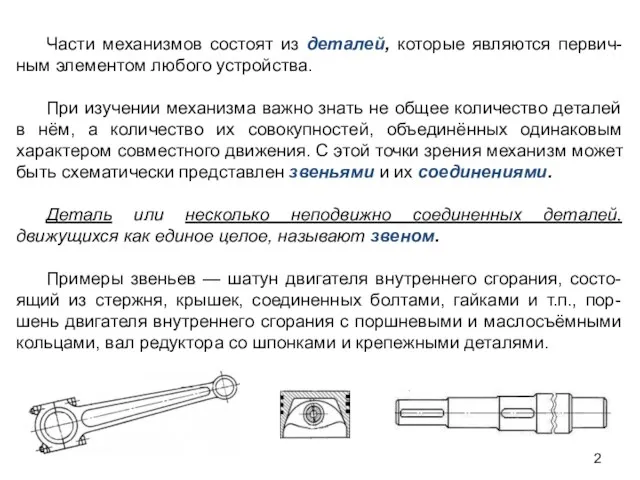
Части механизмов состоят из деталей, которые являются первич-ным элементом любого устройства.
Части механизмов состоят из деталей, которые являются первич-ным элементом любого устройства.
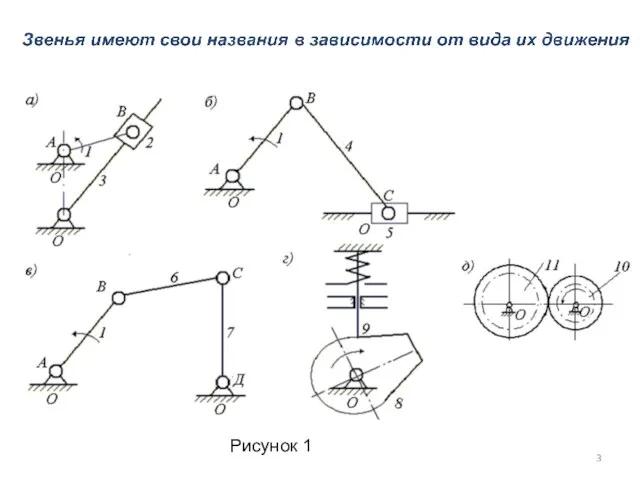
Рисунок 1
Рисунок 1
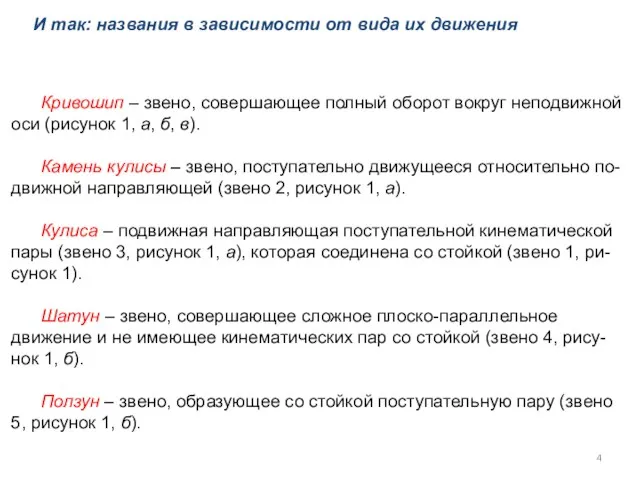
Кривошип – звено, совершающее полный оборот вокруг неподвижной оси (рисунок
Кривошип – звено, совершающее полный оборот вокруг неподвижной оси (рисунок
Коромысло – звено, совершающее колебательные движения относительно неподвижной оси
Кулачок –
Коромысло – звено, совершающее колебательные движения относительно неподвижной оси
Кулачок –
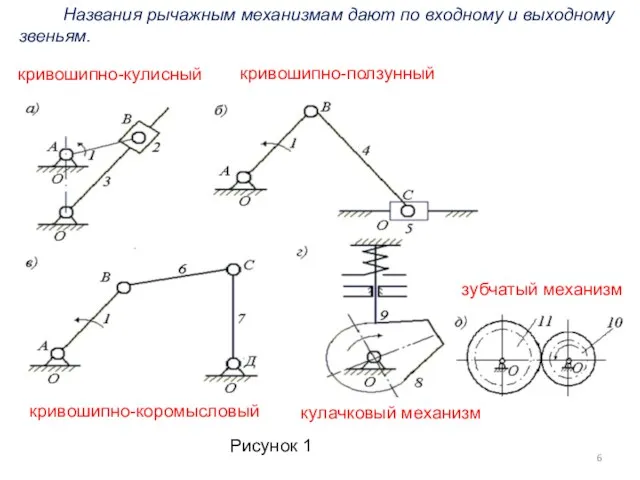
Рисунок 1
Названия рычажным механизмам дают по входному и выходному
Рисунок 1
Названия рычажным механизмам дают по входному и выходному

Соединение двух звеньев, обеспечивающее определенный харак-тер их относительного движения, называется кинематической
Соединение двух звеньев, обеспечивающее определенный харак-тер их относительного движения, называется кинематической
Кинематические пары (КП) классифицируются по следующим признакам:
1.По виду места контакта (места
Кинематические пары (КП) классифицируются по следующим признакам:
1.По виду места контакта (места
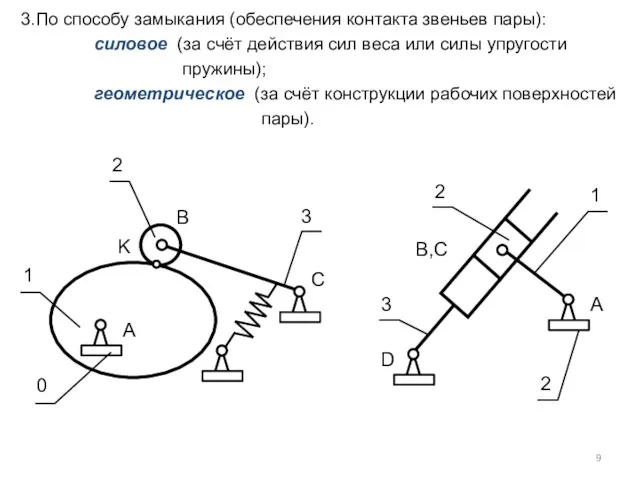
3.По способу замыкания (обеспечения контакта звеньев пары):
силовое (за счёт
3.По способу замыкания (обеспечения контакта звеньев пары):
силовое (за счёт
4.По числу подвижностей в относительном движении звеньев:
одноподвижные
двух-, трёх-,
4.По числу подвижностей в относительном движении звеньев:
одноподвижные
двух-, трёх-,
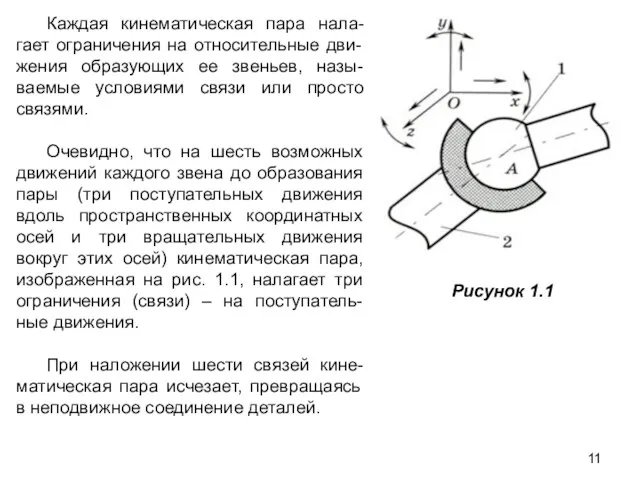
Каждая кинематическая пара нала-гает ограничения на относительные дви-жения образующих ее звеньев,
Каждая кинематическая пара нала-гает ограничения на относительные дви-жения образующих ее звеньев,
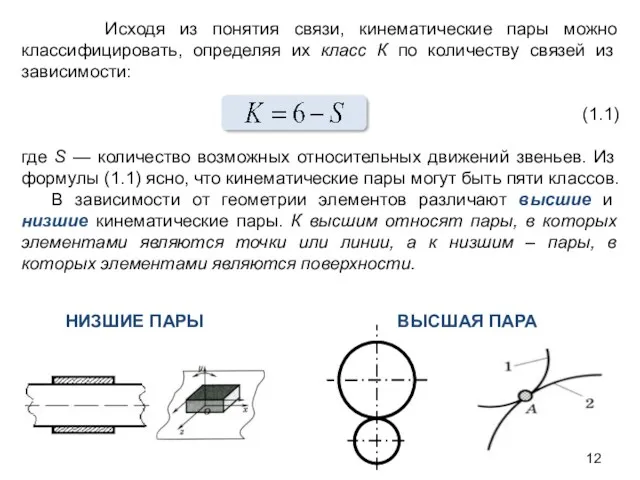
Исходя из понятия связи, кинематические пары можно классифицировать, определяя их
Исходя из понятия связи, кинематические пары можно классифицировать, определяя их
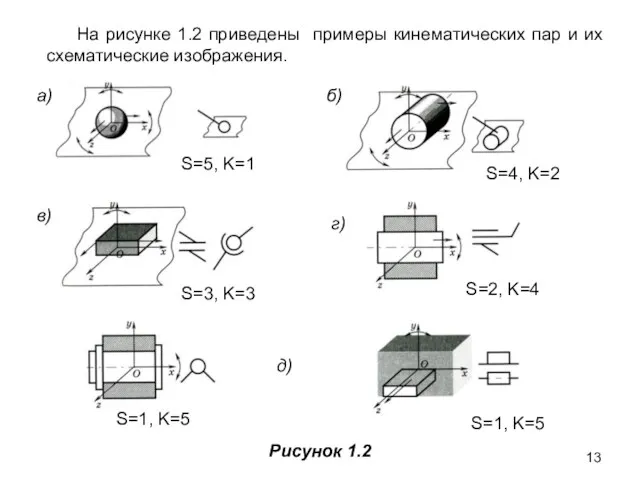
На рисунке 1.2 приведены примеры кинематических пар и их схематические изображения.
а)
б)
в)
г)
д)
S=4,
На рисунке 1.2 приведены примеры кинематических пар и их схематические изображения.
а)
б)
в)
г)
д)
S=4,

Кинематические цепи.
Подвижность кинематической цепи.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Кинематические цепи.
Подвижность кинематической цепи.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
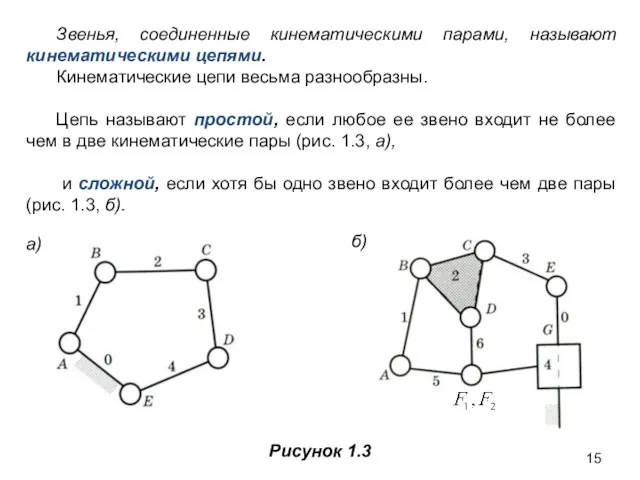
Звенья, соединенные кинематическими парами, называют кинематическими цепями.
Кинематические цепи весьма разнообразны.
Звенья, соединенные кинематическими парами, называют кинематическими цепями.
Кинематические цепи весьма разнообразны.
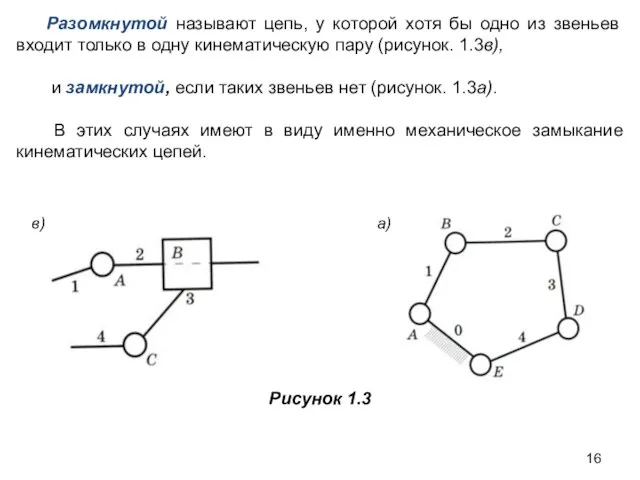
Разомкнутой называют цепь, у которой хотя бы одно из звеньев входит
Разомкнутой называют цепь, у которой хотя бы одно из звеньев входит
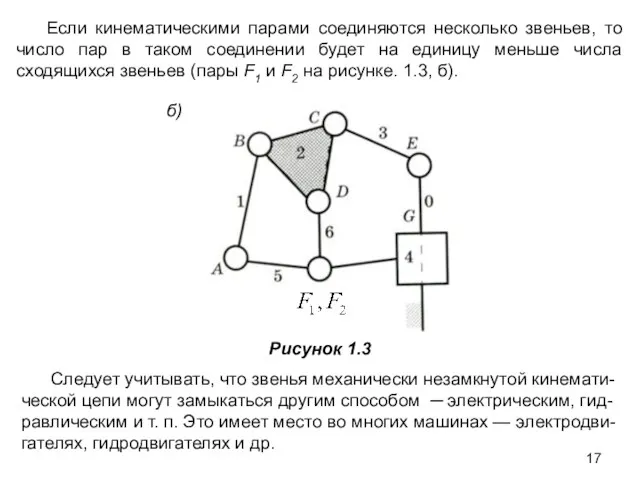
Если кинематическими парами соединяются несколько звеньев, то число пар в таком
Если кинематическими парами соединяются несколько звеньев, то число пар в таком
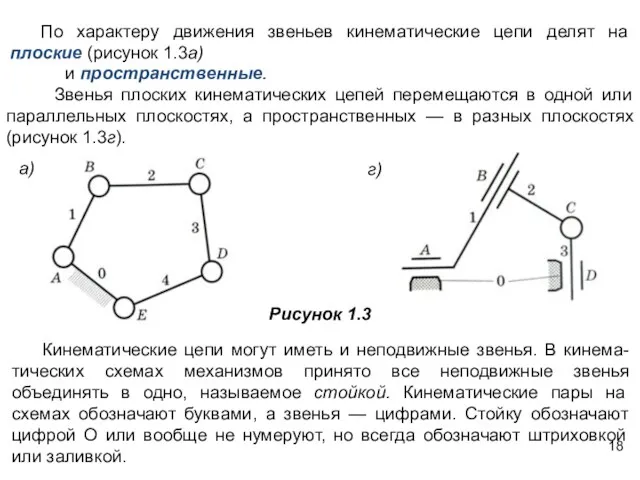
По характеру движения звеньев кинематические цепи делят на плоские (рисунок 1.3а)
г)
а)
Кинематические
По характеру движения звеньев кинематические цепи делят на плоские (рисунок 1.3а)
г)
а)
Кинематические
Звенья кинематических цепей механизмов должны обладать подвижностью — определенностью движения
Звенья кинематических цепей механизмов должны обладать подвижностью — определенностью движения

Структурные формулы для
определения степени подвижности
кинематических цепей.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Структурные формулы для
определения степени подвижности
кинематических цепей.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
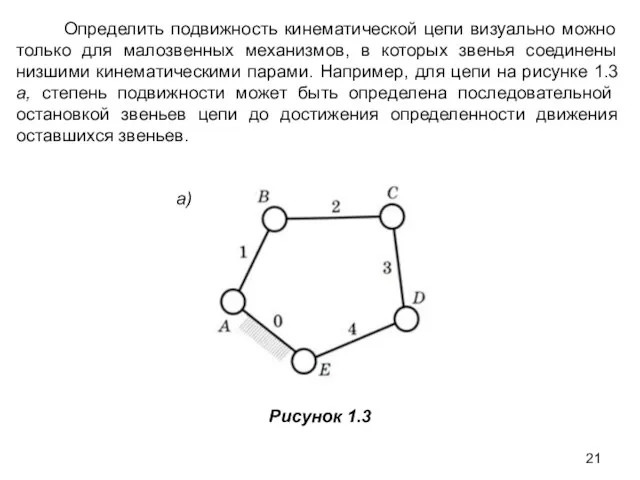
Определить подвижность кинематической цепи визуально можно только для малозвенных механизмов,
Определить подвижность кинематической цепи визуально можно только для малозвенных механизмов,
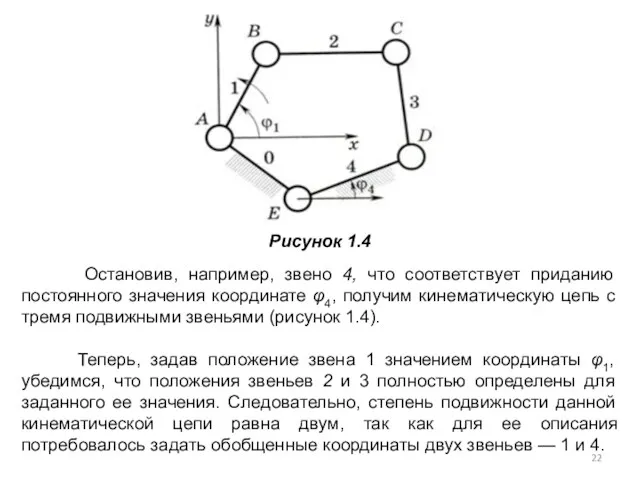
Остановив, например, звено 4, что соответствует приданию постоянного значения координате
Остановив, например, звено 4, что соответствует приданию постоянного значения координате
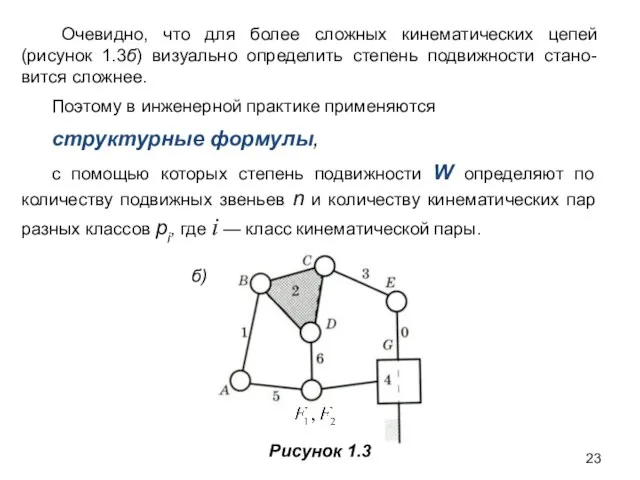
Очевидно, что для более сложных кинематических цепей (рисунок 1.3б) визуально
Очевидно, что для более сложных кинематических цепей (рисунок 1.3б) визуально
Пусть пространственная кинематическая цепь состоит из n звеньев. Каждое из них
Пусть пространственная кинематическая цепь состоит из n звеньев. Каждое из них
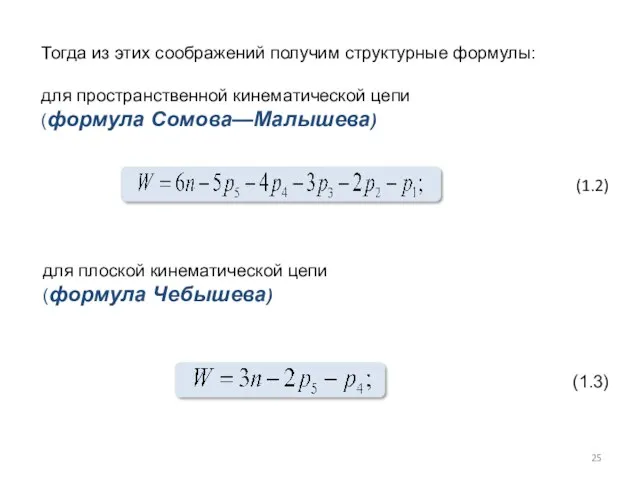
Тогда из этих соображений получим структурные формулы:
для пространственной кинематической цепи
(формула Сомова—Малышева)
(1.2)
для
Тогда из этих соображений получим структурные формулы:
для пространственной кинематической цепи
(формула Сомова—Малышева)
(1.2)
для
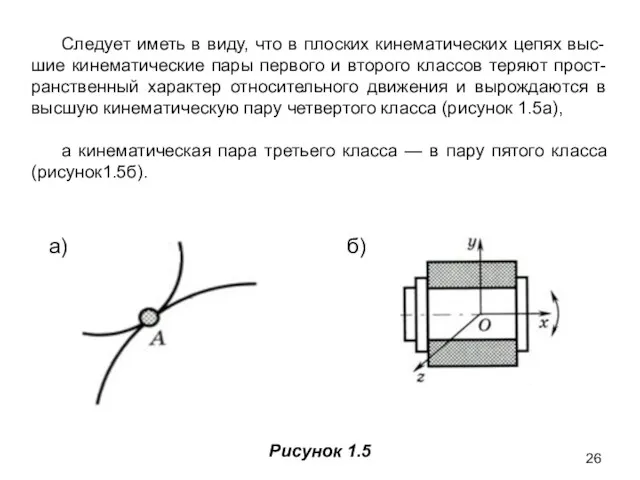
Следует иметь в виду, что в плоских кинематических цепях выс-шие кинематические
Следует иметь в виду, что в плоских кинематических цепях выс-шие кинематические
Впервые закон образования механизмов был сформулирован в 1914 г. русским
Впервые закон образования механизмов был сформулирован в 1914 г. русским
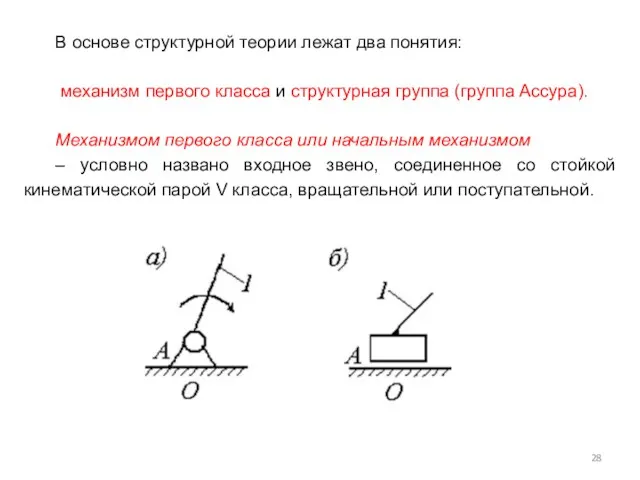
В основе структурной теории лежат два понятия:
механизм первого класса и
В основе структурной теории лежат два понятия:
механизм первого класса и
Структурной группой или группой Ассура
называют кинематическую цепь с
Структурной группой или группой Ассура
называют кинематическую цепь с
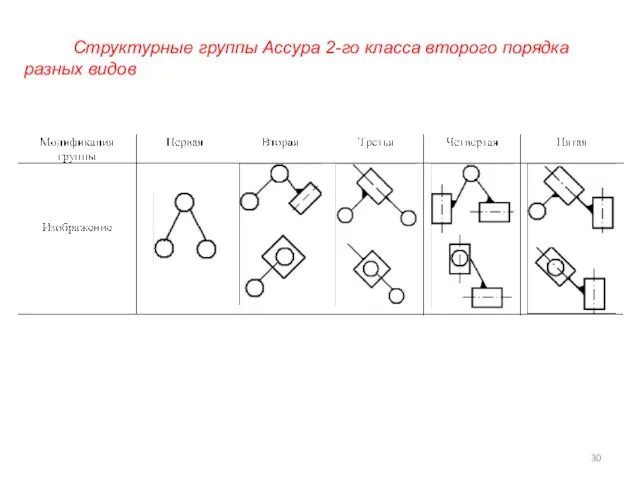
Структурные группы Ассура 2-го класса второго порядка разных видов
Структурные группы Ассура 2-го класса второго порядка разных видов
 Молекулярно-кинетические свойства коллоидных систем
Молекулярно-кинетические свойства коллоидных систем Динамика вращательного движения твердого тела
Динамика вращательного движения твердого тела Явление электромагнитной индукции. Магнитный поток. Закон электромагнитной индукции.
Явление электромагнитной индукции. Магнитный поток. Закон электромагнитной индукции. Идеальный и реальный газ
Идеальный и реальный газ Радиоактивность как свидетельство сложного строения атома
Радиоактивность как свидетельство сложного строения атома Постоянный электрический ток. Наличие свободных электрических зарядов в проводнике
Постоянный электрический ток. Наличие свободных электрических зарядов в проводнике ЕГЭ по физике
ЕГЭ по физике Радуга
Радуга Оборудование для заземления нейтрали в сетях 6-35 кВ
Оборудование для заземления нейтрали в сетях 6-35 кВ Внеклассное мероприятие по физике в 7 классе
Внеклассное мероприятие по физике в 7 классе Експлуатація та ремонт електро і спецобладнання та автоматики бронетанкової техніки
Експлуатація та ремонт електро і спецобладнання та автоматики бронетанкової техніки Элементы ядерной физики
Элементы ядерной физики Виды теплопередачи. Теплопроводность. Конвекция. Излучение
Виды теплопередачи. Теплопроводность. Конвекция. Излучение Рух в природі та основа відліку часу
Рух в природі та основа відліку часу Электростатика. Лекция №1
Электростатика. Лекция №1 Строение вещества.
Строение вещества. Влагомаслоотделитель пневматической системы троллейбуса ЗИУ - 9
Влагомаслоотделитель пневматической системы троллейбуса ЗИУ - 9 Части и подразделения связи соединений сухопутных войск
Части и подразделения связи соединений сухопутных войск Основные положения молекулярно-кинетической теории
Основные положения молекулярно-кинетической теории Критерии совершенства конструкций. Лекция 3
Критерии совершенства конструкций. Лекция 3 Авиационные ГТД. Лекция 1. Введение
Авиационные ГТД. Лекция 1. Введение Введение в теорию конечных элементов
Введение в теорию конечных элементов Виды учебной деятельности
Виды учебной деятельности Нанотехнологии
Нанотехнологии Антенно-мачтовые сооружения
Антенно-мачтовые сооружения Изучение строения и принципа работы катушки тесла
Изучение строения и принципа работы катушки тесла Движение зарядов в электрическом и магнитном поле. Движение в электрическом поле. (Часть 1)
Движение зарядов в электрическом и магнитном поле. Движение в электрическом поле. (Часть 1) Открытие протона и нейтрона. 9 класс
Открытие протона и нейтрона. 9 класс