- Динамика КШМ, часть 1. Лекция №2

Содержание
- 2. в определении сил, действующих на его элементы, в изучении взаимосвязи между кинематическими параметрами элементов, их массами,
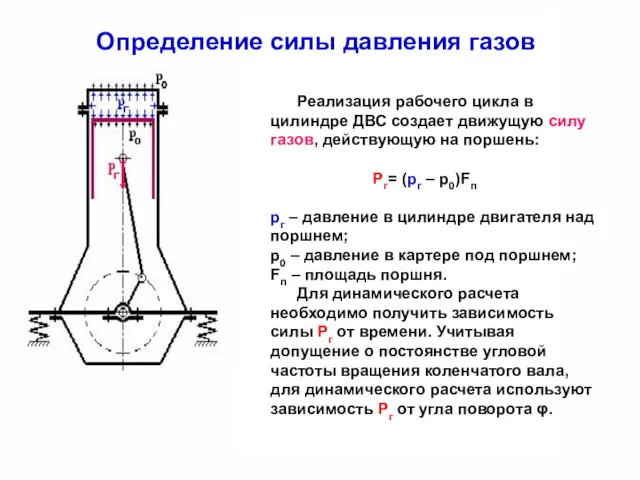
- 3. Реализация рабочего цикла в цилиндре ДВС создает движущую силу газов, действующую на поршень: Рг= (рг –
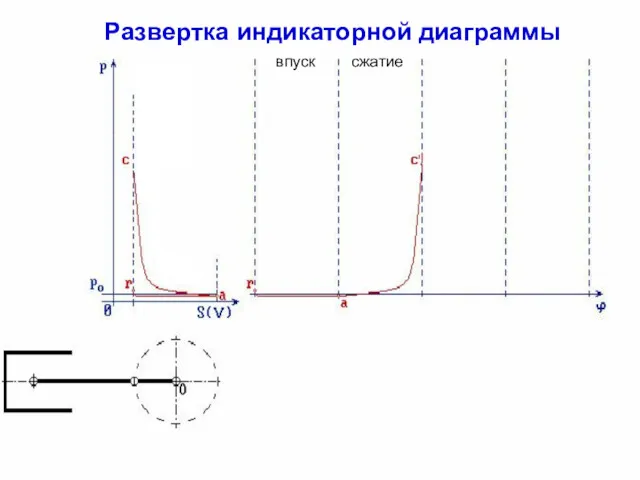
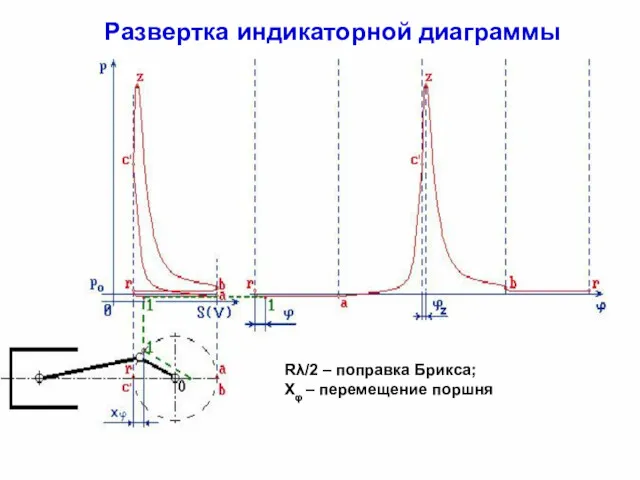
- 4. Зависимость Рг от угла поворота φ получают перестроением индикаторной диаграммы, определенной в тепловом расчете, из р
- 5. Развертка индикаторной диаграммы впуск
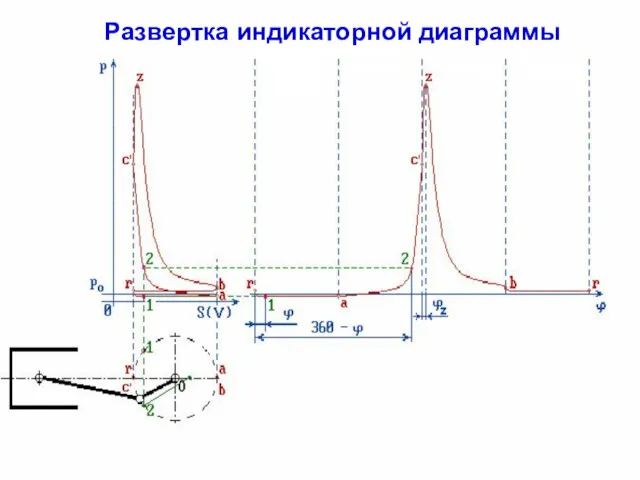
- 6. Развертка индикаторной диаграммы впуск сжатие
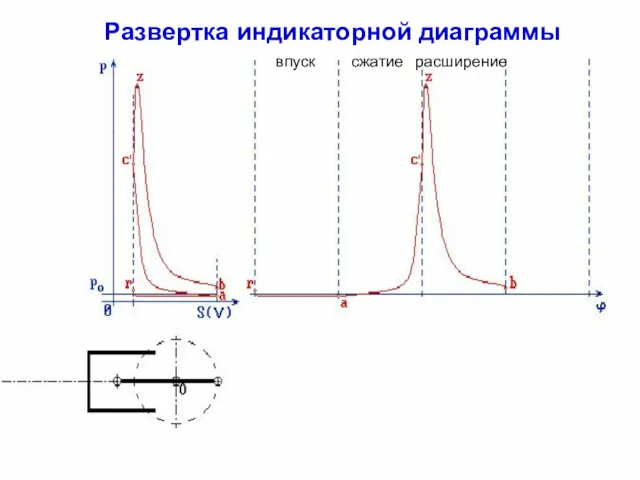
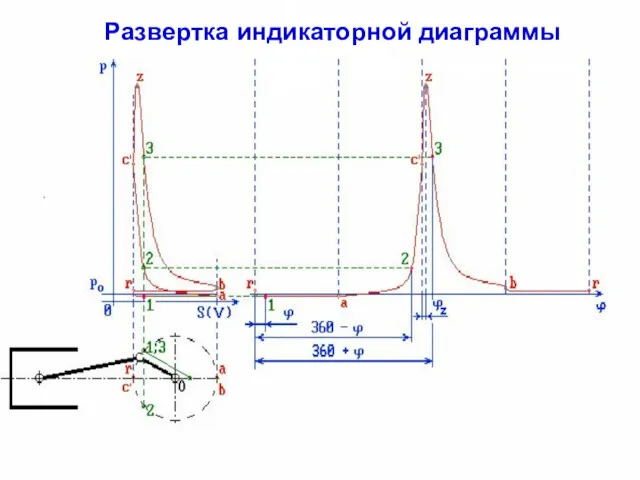
- 7. Развертка индикаторной диаграммы впуск сжатие расширение
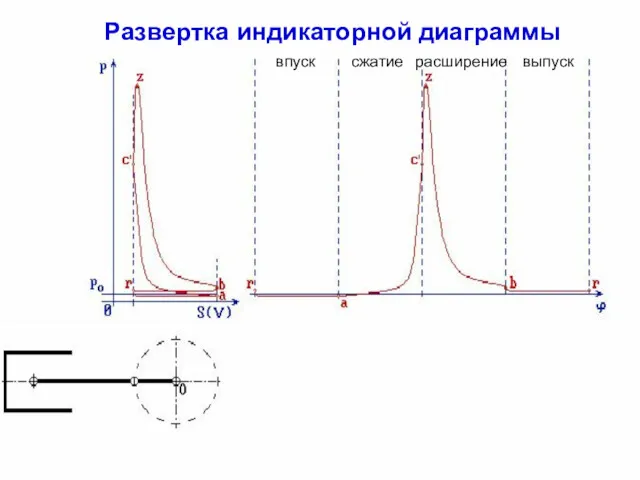
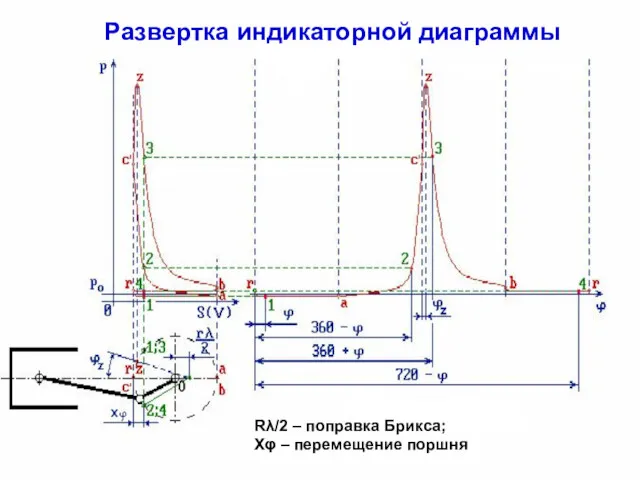
- 8. Развертка индикаторной диаграммы впуск сжатие расширение выпуск
- 9. Rλ/2 – поправка Брикса Развертка индикаторной диаграммы Определение угла поворота коленчатого вала для точки z (обратная
- 10. Rλ/2 – поправка Брикса; Хφ – перемещение поршня Развертка индикаторной диаграммы
- 11. Развертка индикаторной диаграммы
- 12. Развертка индикаторной диаграммы
- 13. Rλ/2 – поправка Брикса; Хφ – перемещение поршня Развертка индикаторной диаграммы
- 14. ПРИВЕДЕНИЕ КШМ К ДВУХМАССОВОЙ МОДЕЛИ
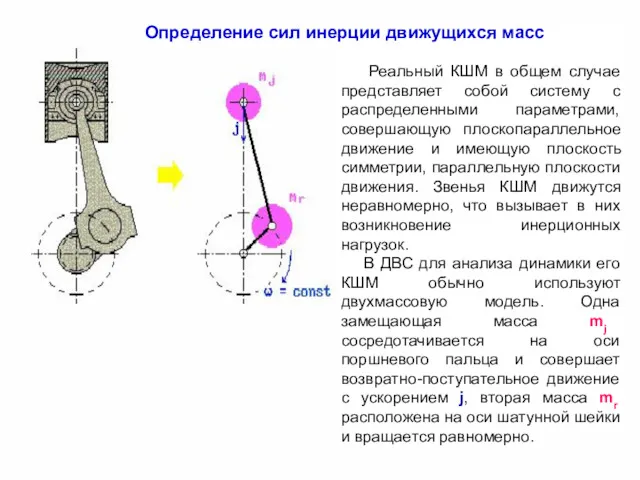
- 15. Определение сил инерции движущихся масс Реальный КШМ в общем случае представляет собой систему с распределенными параметрами,
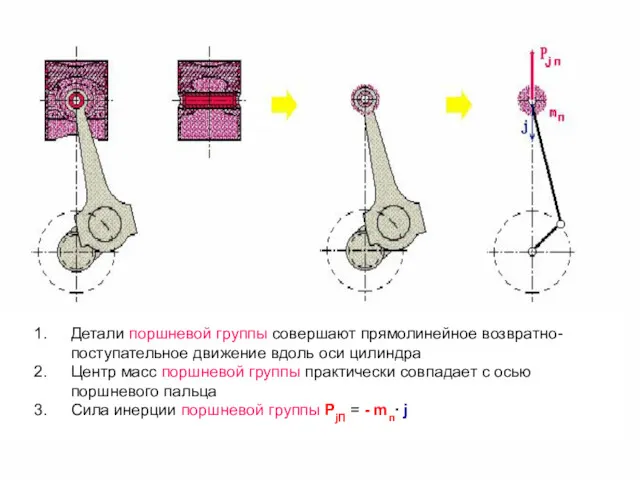
- 16. Детали поршневой группы совершают прямолинейное возвратно-поступательное движение вдоль оси цилиндра Центр масс поршневой группы практически совпадает
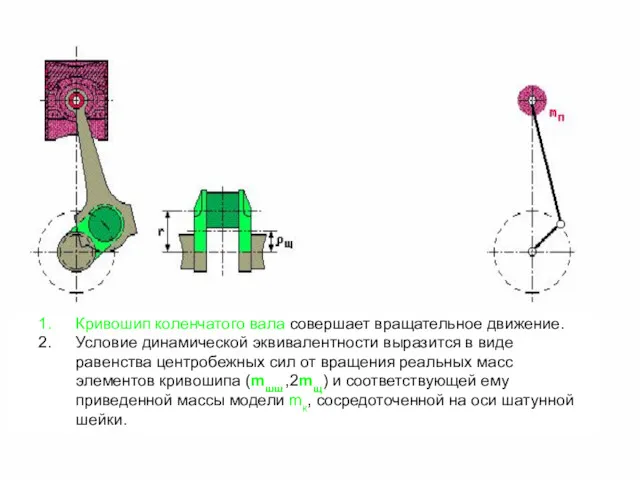
- 17. Кривошип коленчатого вала совершает вращательное движение. Условие динамической эквивалентности выразится в виде равенства центробежных сил от
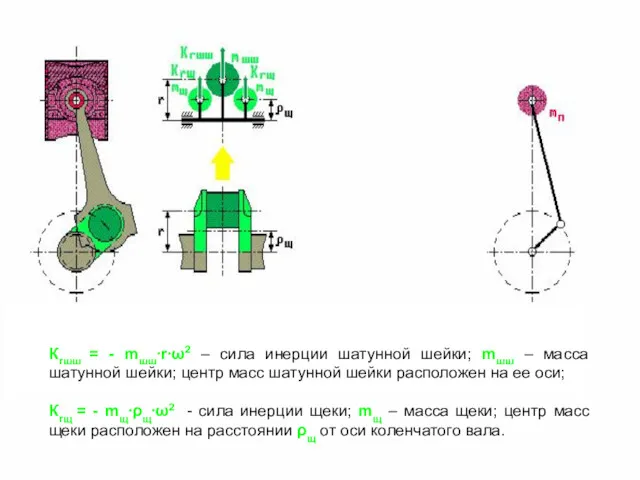
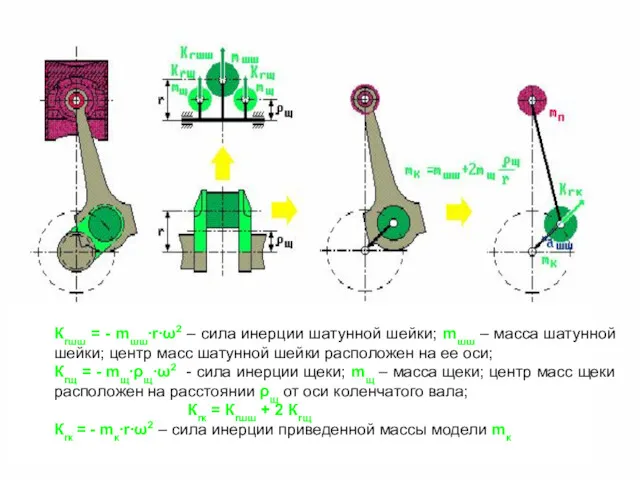
- 18. Кrшш = - mшш∙r∙ω2 – сила инерции шатунной шейки; mшш – масса шатунной шейки; центр масс
- 19. Кrшш = - mшш∙r∙ω2 – сила инерции шатунной шейки; mшш – масса шатунной шейки; центр масс
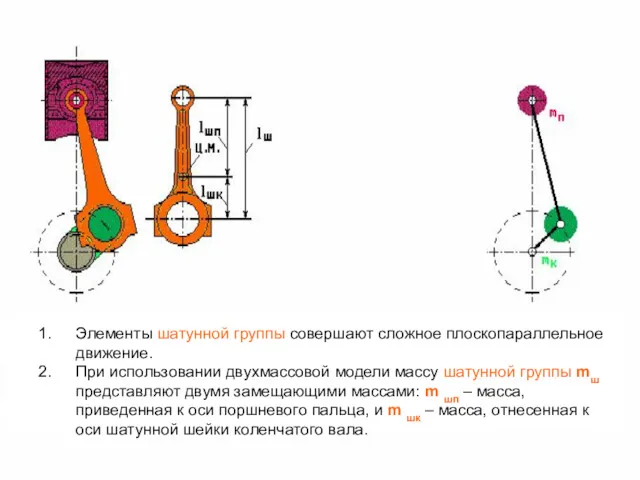
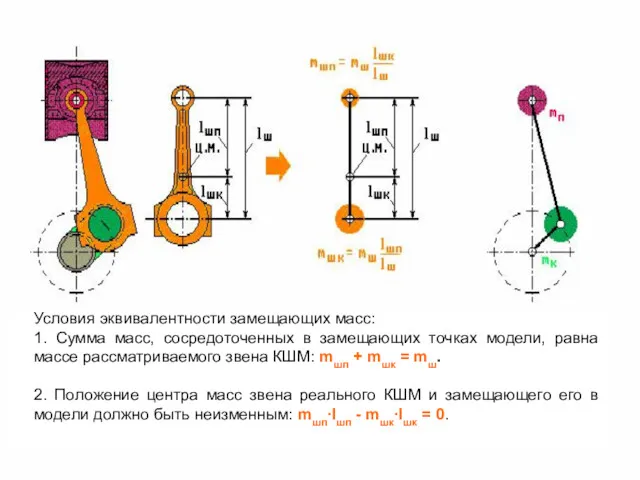
- 20. Элементы шатунной группы совершают сложное плоскопараллельное движение. При использовании двухмассовой модели массу шатунной группы mш представляют
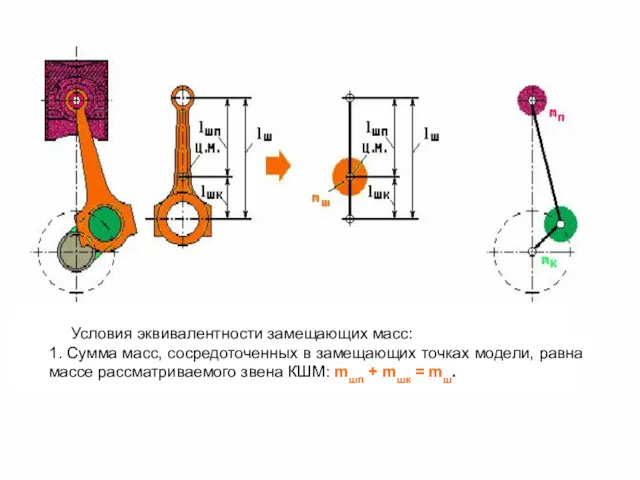
- 21. Условия эквивалентности замещающих масс: 1. Сумма масс, сосредоточенных в замещающих точках модели, равна массе рассматриваемого звена
- 22. Условия эквивалентности замещающих масс: 1. Сумма масс, сосредоточенных в замещающих точках модели, равна массе рассматриваемого звена
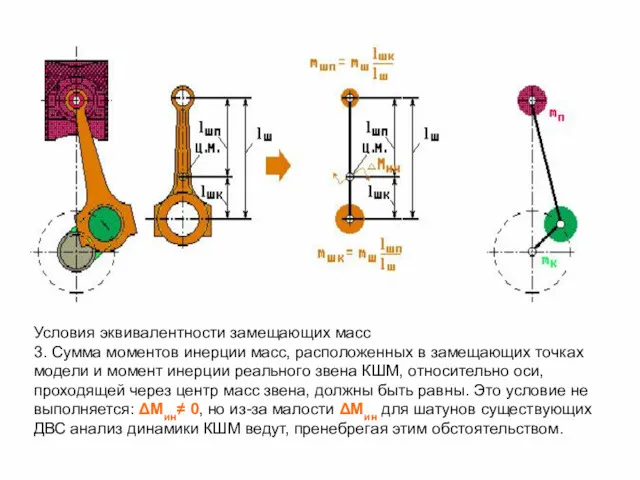
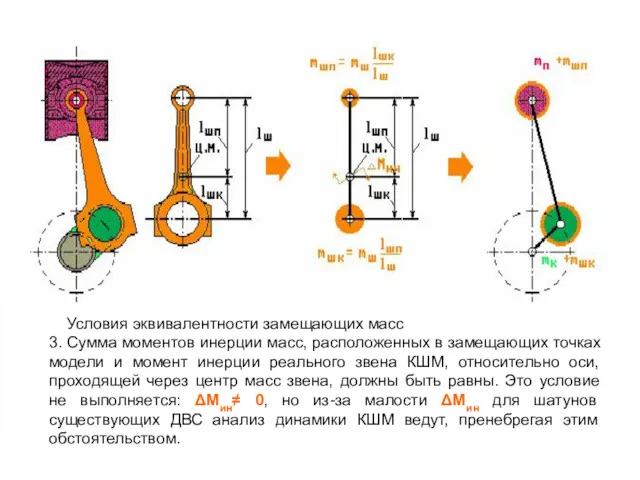
- 23. Условия эквивалентности замещающих масс 3. Сумма моментов инерции масс, расположенных в замещающих точках модели и момент
- 24. Условия эквивалентности замещающих масс 3. Сумма моментов инерции масс, расположенных в замещающих точках модели и момент
- 25. Таким образом, весь кривошипно-шатунный механизм приближенно заменяют системой двух сосредоточенных масс, связанных невесомыми звеньями.
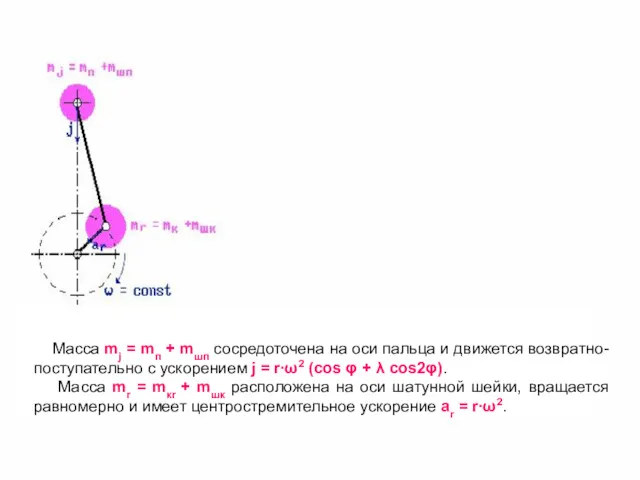
- 26. Масса mj = mп + mшп сосредоточена на оси пальца и движется возвратно-поступательно с ускорением j
- 27. Масса mj = mп + mшп сосредоточена на оси пальца и движется возвратно-поступательно с ускорением j
- 29. Скачать презентацию
в определении сил, действующих на его элементы, в изучении взаимосвязи между
в определении сил, действующих на его элементы, в изучении взаимосвязи между
Реализация рабочего цикла в цилиндре ДВС создает движущую силу газов,
Реализация рабочего цикла в цилиндре ДВС создает движущую силу газов,
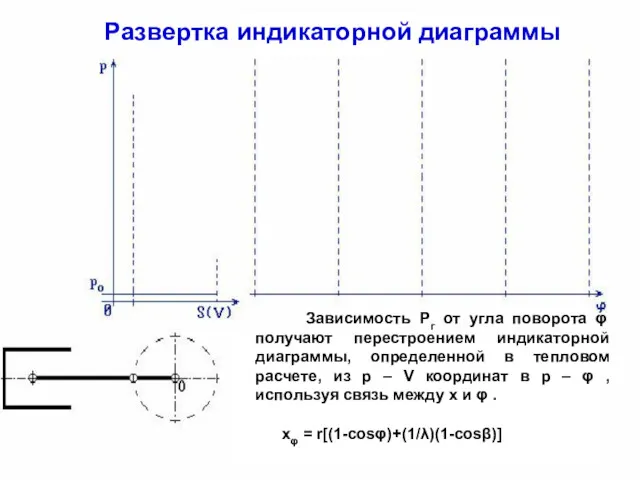
Зависимость Рг от угла поворота φ получают перестроением индикаторной диаграммы,
Зависимость Рг от угла поворота φ получают перестроением индикаторной диаграммы,
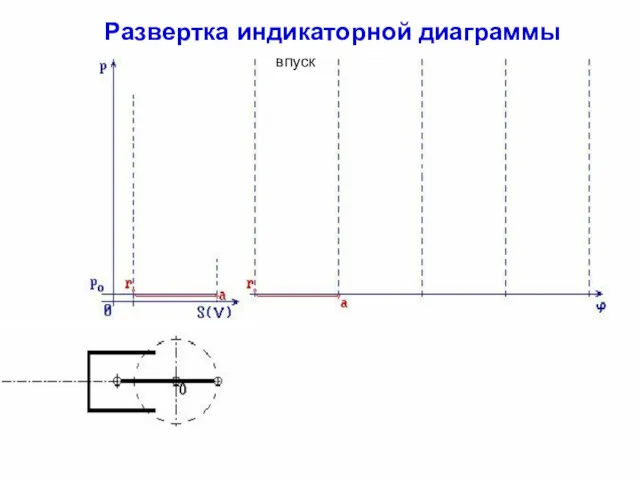
Развертка индикаторной диаграммы
впуск
Развертка индикаторной диаграммы
впуск
Развертка индикаторной диаграммы
впуск
сжатие
Развертка индикаторной диаграммы
впуск
сжатие
Развертка индикаторной диаграммы
впуск
сжатие
расширение
Развертка индикаторной диаграммы
впуск
сжатие
расширение
Развертка индикаторной диаграммы
впуск
сжатие
расширение
выпуск
Развертка индикаторной диаграммы
впуск
сжатие
расширение
выпуск
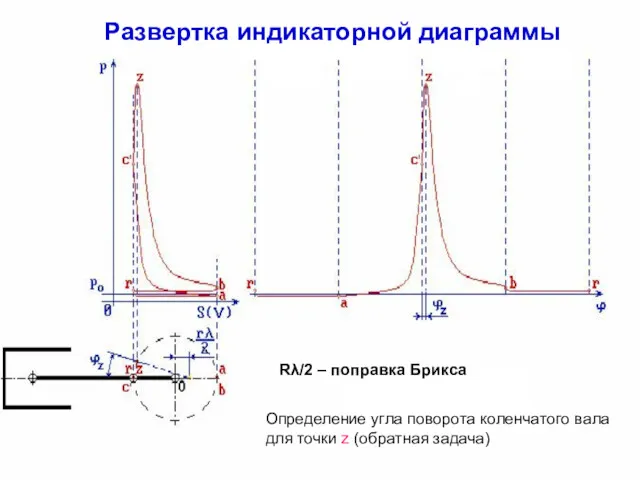
Rλ/2 – поправка Брикса
Развертка индикаторной диаграммы
Определение угла поворота коленчатого вала для
Rλ/2 – поправка Брикса
Развертка индикаторной диаграммы
Определение угла поворота коленчатого вала для
Rλ/2 – поправка Брикса;
Хφ – перемещение поршня
Развертка индикаторной диаграммы
Rλ/2 – поправка Брикса;
Хφ – перемещение поршня
Развертка индикаторной диаграммы
Развертка индикаторной диаграммы
Развертка индикаторной диаграммы
Развертка индикаторной диаграммы
Развертка индикаторной диаграммы
Rλ/2 – поправка Брикса;
Хφ – перемещение поршня
Развертка индикаторной диаграммы
Rλ/2 – поправка Брикса;
Хφ – перемещение поршня
Развертка индикаторной диаграммы
ПРИВЕДЕНИЕ КШМ
К ДВУХМАССОВОЙ МОДЕЛИ
ПРИВЕДЕНИЕ КШМ
К ДВУХМАССОВОЙ МОДЕЛИ
Определение сил инерции движущихся масс
Реальный КШМ в общем случае представляет
Определение сил инерции движущихся масс
Реальный КШМ в общем случае представляет
Детали поршневой группы совершают прямолинейное возвратно-поступательное движение вдоль оси цилиндра
Центр масс
Детали поршневой группы совершают прямолинейное возвратно-поступательное движение вдоль оси цилиндра
Центр масс
Кривошип коленчатого вала совершает вращательное движение.
Условие динамической эквивалентности выразится в виде
Кривошип коленчатого вала совершает вращательное движение.
Условие динамической эквивалентности выразится в виде
Кrшш = - mшш∙r∙ω2 – сила инерции шатунной шейки; mшш –
Кrшш = - mшш∙r∙ω2 – сила инерции шатунной шейки; mшш –
Кrшш = - mшш∙r∙ω2 – сила инерции шатунной шейки; mшш –
Кrшш = - mшш∙r∙ω2 – сила инерции шатунной шейки; mшш –
Элементы шатунной группы совершают сложное плоскопараллельное движение.
При использовании двухмассовой модели массу
Элементы шатунной группы совершают сложное плоскопараллельное движение.
При использовании двухмассовой модели массу
Условия эквивалентности замещающих масс:
1. Сумма масс, сосредоточенных в замещающих точках
Условия эквивалентности замещающих масс:
1. Сумма масс, сосредоточенных в замещающих точках
Условия эквивалентности замещающих масс:
1. Сумма масс, сосредоточенных в замещающих точках модели,
Условия эквивалентности замещающих масс:
1. Сумма масс, сосредоточенных в замещающих точках модели,
Условия эквивалентности замещающих масс
3. Сумма моментов инерции масс, расположенных в замещающих
Условия эквивалентности замещающих масс
3. Сумма моментов инерции масс, расположенных в замещающих
Условия эквивалентности замещающих масс
3. Сумма моментов инерции масс, расположенных в
Условия эквивалентности замещающих масс
3. Сумма моментов инерции масс, расположенных в

Таким образом, весь кривошипно-шатунный механизм приближенно заменяют системой двух сосредоточенных
Таким образом, весь кривошипно-шатунный механизм приближенно заменяют системой двух сосредоточенных
Масса mj = mп + mшп сосредоточена на оси пальца
Масса mj = mп + mшп сосредоточена на оси пальца
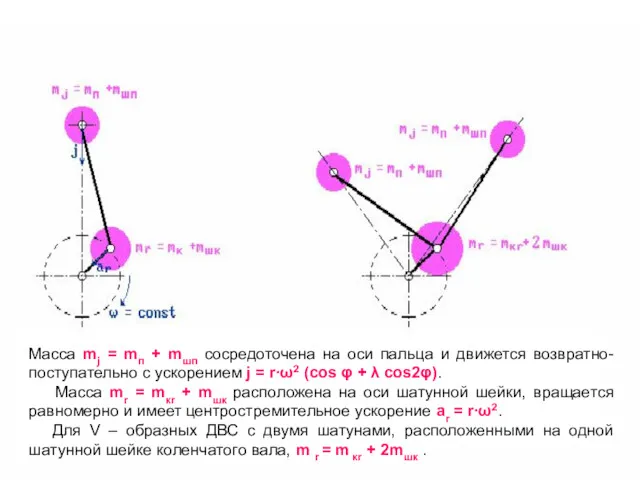
Масса mj = mп + mшп сосредоточена на оси пальца и
Масса mj = mп + mшп сосредоточена на оси пальца и
 Машины переменного тока. Синхронные машины. Реакция якоря. (Лекция 5)
Машины переменного тока. Синхронные машины. Реакция якоря. (Лекция 5) Интегральные датчики. Датчики давления, влажности, Холла
Интегральные датчики. Датчики давления, влажности, Холла Вечный двигатель
Вечный двигатель Классификация и свойства углеродных наноматериалов
Классификация и свойства углеродных наноматериалов Э.М. Спиридонов. Эволюция минералов ртути в зоне гипергенеза
Э.М. Спиридонов. Эволюция минералов ртути в зоне гипергенеза Фрикционные передачи
Фрикционные передачи Рівномірний рух по колу
Рівномірний рух по колу Bike
Bike Творческая работа по физике Знакомство с лазерными технологиями
Творческая работа по физике Знакомство с лазерными технологиями Проектирование узла измерения тока саморазряда электрохимического источника питания
Проектирование узла измерения тока саморазряда электрохимического источника питания Инженерно-авиационное обеспечение безопасности полётов
Инженерно-авиационное обеспечение безопасности полётов Законы регулирования
Законы регулирования Путешествие в физику
Путешествие в физику Стародавні телескопи
Стародавні телескопи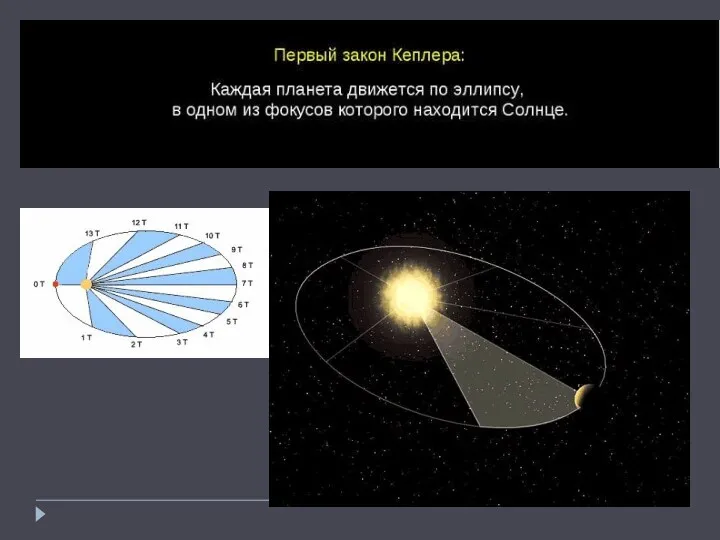 Первый закон Кеплера
Первый закон Кеплера 20230316_agregatnoe_sostoyanie_veshchestva_0
20230316_agregatnoe_sostoyanie_veshchestva_0 краткий справочник по физике 8
краткий справочник по физике 8 Влияние электромагнитного поля на окружающую среду и человека. 8 класс
Влияние электромагнитного поля на окружающую среду и человека. 8 класс Детекторы ионизирующих излучений. Введение
Детекторы ионизирующих излучений. Введение Поршневая группа
Поршневая группа Компетентностный подход в образовании.
Компетентностный подход в образовании. Урок Атмосферное давление
Урок Атмосферное давление Методы помехоустойчивого приема дискретных сообщений
Методы помехоустойчивого приема дискретных сообщений Исследование прочностных характеристик сердечников крестовин стрелочных переводов после упрочняющей обработки
Исследование прочностных характеристик сердечников крестовин стрелочных переводов после упрочняющей обработки Характеристики двигателя внутреннего сгорания
Характеристики двигателя внутреннего сгорания Технічні дані тепловозів
Технічні дані тепловозів Напряженность электрического поля. Принцип суперпозиции полей
Напряженность электрического поля. Принцип суперпозиции полей Как и почему летают самолеты и планера
Как и почему летают самолеты и планера