- Методы помехоустойчивого приема дискретных сообщений

Содержание
- 2. Лекция №2 Основные сведения о различения двух сигналов при наличии аддитивного белого шума ВОПРОСЫ 1. Оптимальный
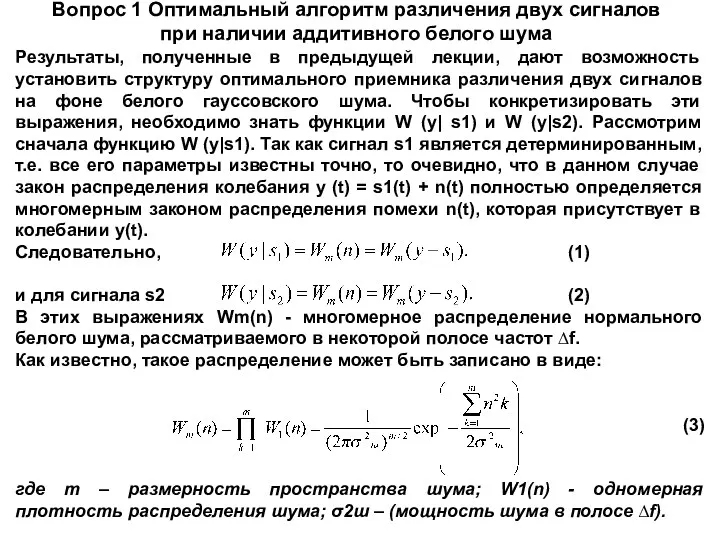
- 3. Вопрос 1 Оптимальный алгоритм различения двух сигналов при наличии аддитивного белого шума Результаты, полученные в предыдущей
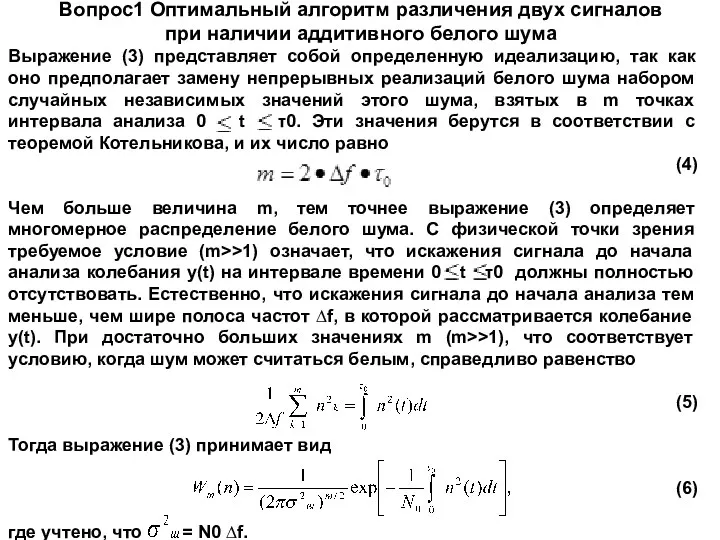
- 4. Вопрос1 Оптимальный алгоритм различения двух сигналов при наличии аддитивного белого шума Выражение (3) представляет собой определенную
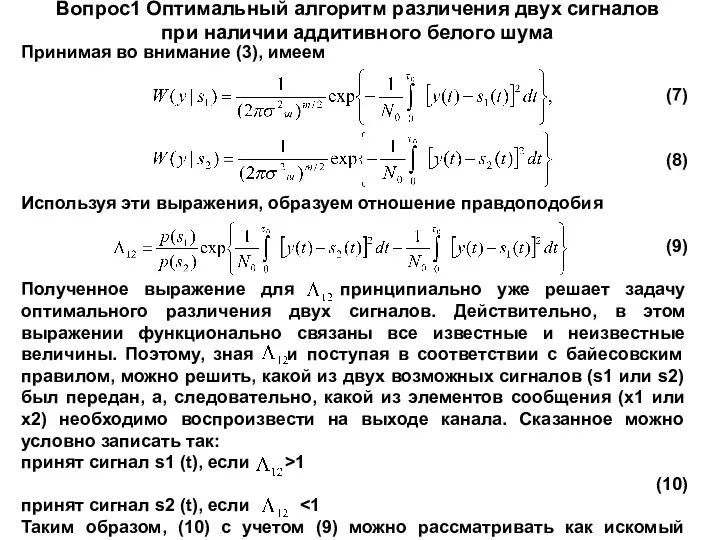
- 5. Принимая во внимание (3), имеем (7) (8) Используя эти выражения, образуем отношение правдоподобия (9) Полученное выражение
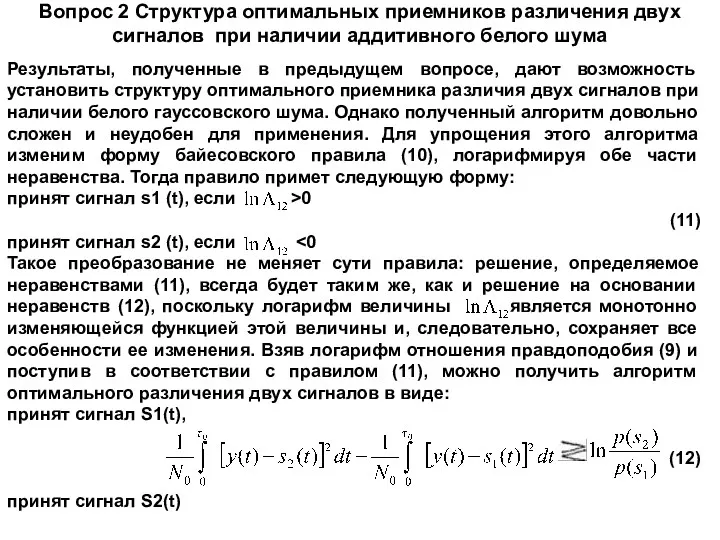
- 6. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Результаты, полученные в
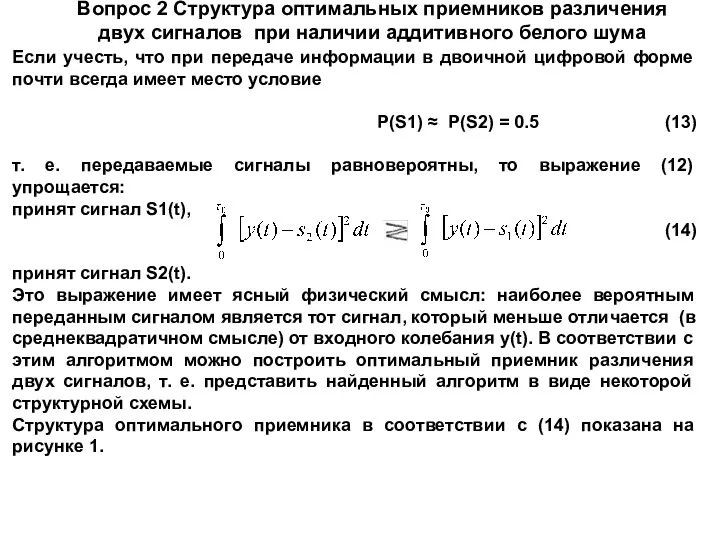
- 7. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Если учесть, что
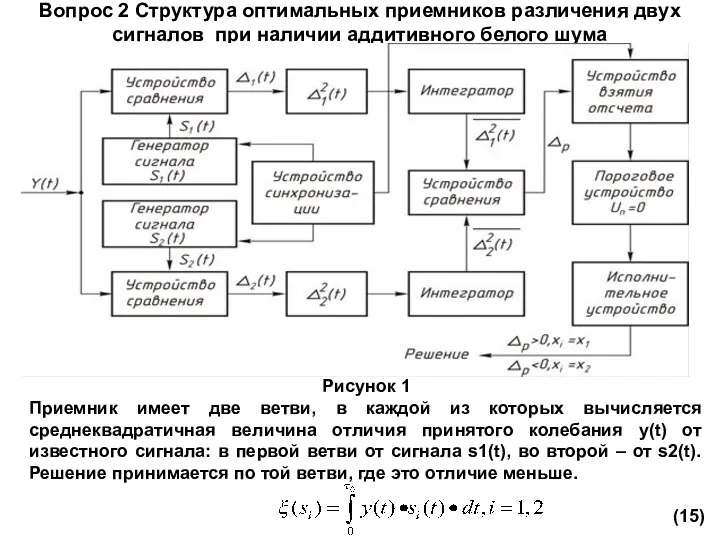
- 8. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Рисунок 1 Приемник
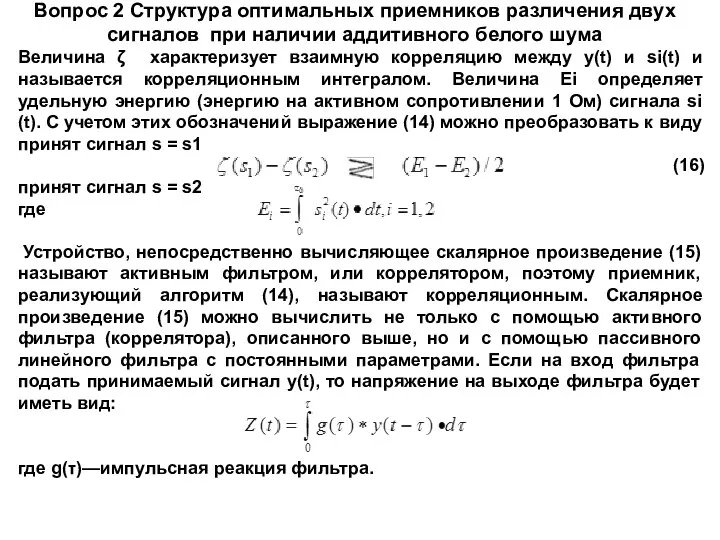
- 9. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Величина ζ характеризует
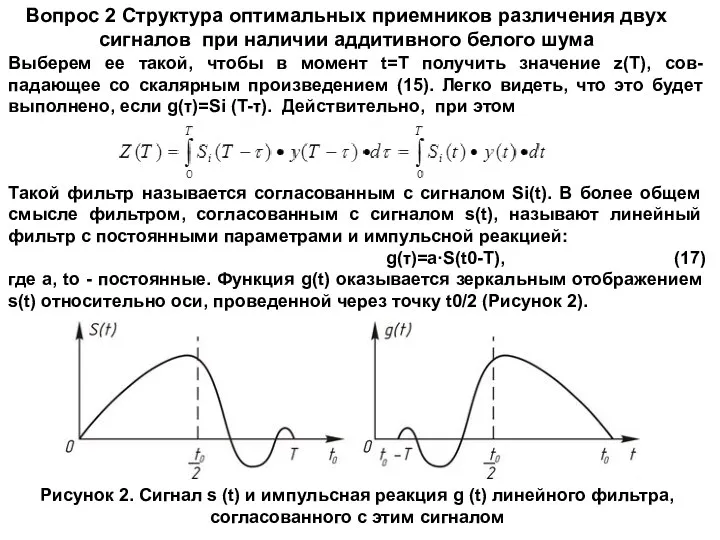
- 10. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Выберем ее такой,
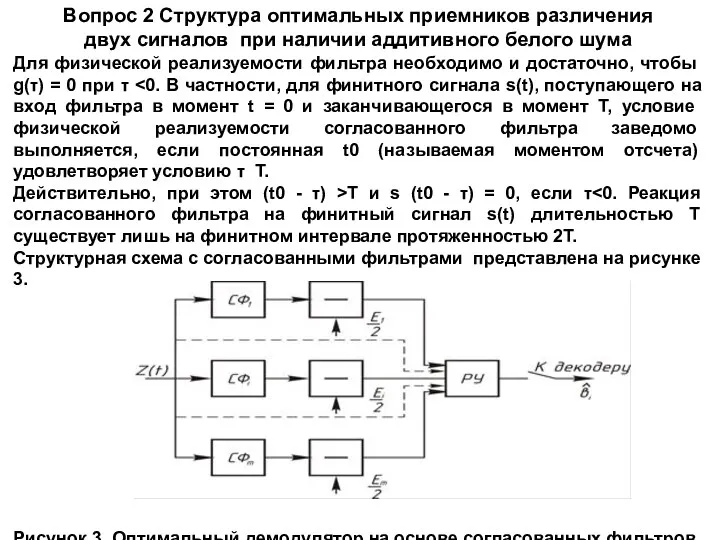
- 11. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Для физической реализуемости
- 12. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Особенности функционирования оптимальных
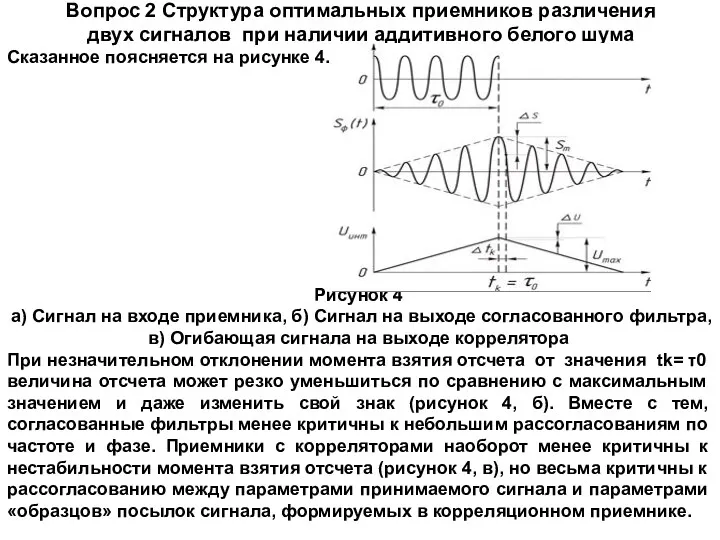
- 13. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Сказанное поясняется на
- 14. Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного белого шума Для уменьшения влияния
- 16. Скачать презентацию
Лекция №2 Основные сведения о различения двух сигналов при наличии аддитивного
Лекция №2 Основные сведения о различения двух сигналов при наличии аддитивного
Вопрос 1 Оптимальный алгоритм различения двух сигналов при наличии аддитивного белого
Вопрос 1 Оптимальный алгоритм различения двух сигналов при наличии аддитивного белого
Вопрос1 Оптимальный алгоритм различения двух сигналов при наличии аддитивного белого шума
Выражение
Вопрос1 Оптимальный алгоритм различения двух сигналов при наличии аддитивного белого шума
Выражение
Принимая во внимание (3), имеем
(7)
(8)
Используя эти выражения, образуем отношение правдоподобия
Принимая во внимание (3), имеем
(7)
(8)
Используя эти выражения, образуем отношение правдоподобия
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
Вопрос 2 Структура оптимальных приемников различения двух сигналов при наличии аддитивного
 Сила трения. Тест
Сила трения. Тест Расчет давления жидкости на дно и стенки сосуда
Расчет давления жидкости на дно и стенки сосуда Техническое обслуживание и ремонт системы охлаждения двигателя автомобиля ВАЗ-2114
Техническое обслуживание и ремонт системы охлаждения двигателя автомобиля ВАЗ-2114 ИК - спектроскопия. 3 курс
ИК - спектроскопия. 3 курс Устойчивость. Формула Эйлера
Устойчивость. Формула Эйлера Физические основы механики. Физика в познании вещества, поля, пространства и времени
Физические основы механики. Физика в познании вещества, поля, пространства и времени Эволюция учения об атоме. Материалы к уроку
Эволюция учения об атоме. Материалы к уроку Ременные передачи
Ременные передачи Температурные шкалы и их модели
Температурные шкалы и их модели Архимедова сила
Архимедова сила Основные законы электростатики
Основные законы электростатики Строение атома
Строение атома Лазерная технология
Лазерная технология магнитные явления
магнитные явления Парогенераторы АЭС. Первичные теплоносители. (Тема 3)
Парогенераторы АЭС. Первичные теплоносители. (Тема 3) Инструментальные методы качественного анализа органических веществ
Инструментальные методы качественного анализа органических веществ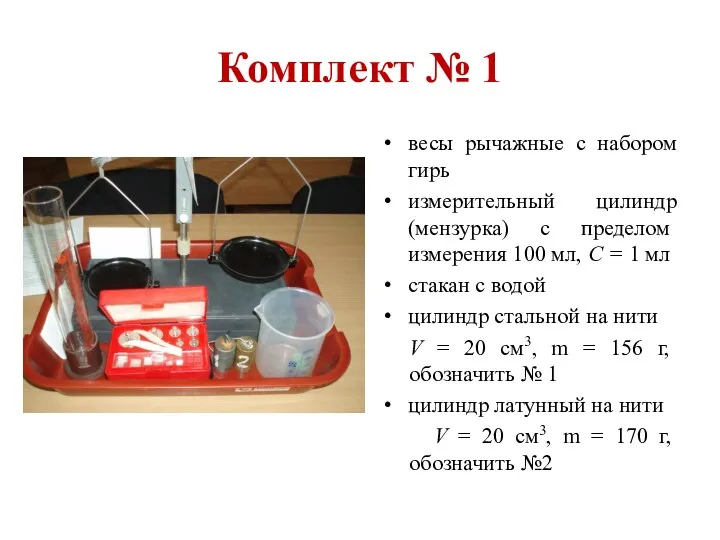 Комплекты для экспериментальных заданий ОГЭ по физике
Комплекты для экспериментальных заданий ОГЭ по физике Ом заңы
Ом заңы Wireless Communication
Wireless Communication Сила упругости
Сила упругости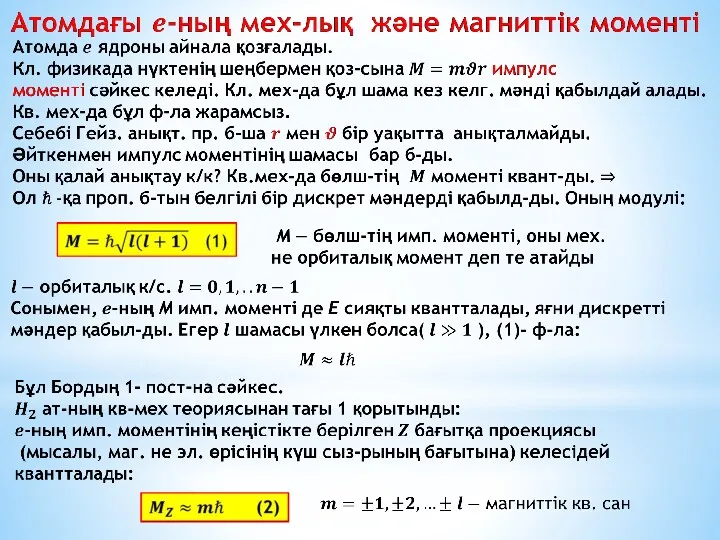 Шредингер теңдеуі
Шредингер теңдеуі Определение показателя преломления стекла. Лабораторная работа. 11 класс.
Определение показателя преломления стекла. Лабораторная работа. 11 класс. Может ли магнит потерять свою силу
Может ли магнит потерять свою силу Взаимозаменяемость деталей. Сущность взаимозаменяемости
Взаимозаменяемость деталей. Сущность взаимозаменяемости Давление твердых тел, жидкостей и газов
Давление твердых тел, жидкостей и газов Ремонт гребного винта и вала
Ремонт гребного винта и вала Відносність руху
Відносність руху Электрические явления. Расчет электроэнергии, потребляемой бытовыми приборами. (8 класс)
Электрические явления. Расчет электроэнергии, потребляемой бытовыми приборами. (8 класс)