- Движение тела вокруг неподвижной точки. Случай Эйлера

Содержание
- 2. 1. Обозначения Рассмотрим твердое тело, имеющее одну неподвижную точку О неподвижная система координат подвижная система координат
- 3. 2. Выражение для кинетического момента в ПСС напоминание Если оси (x,y,z) главные (и только в этом
- 4. 3. Динамические уравнения Эйлера абсолютная производная относительная производная напоминание Теорема об изменении кинетического момента в неподвижной
- 5. 4. Выражение для кинетической энергии в ПСС напоминание Изменяется во времени, т.к. мгновенная ось перемещается относительно
- 6. Моменты в правых частях динамических уравнений Эйлера являются, вообще говоря, функциями эйлеровых углов, их производных и
- 7. 6. Эйлеровы углы и кинемати-ческие уравнения Эйлера Плоскость Р проведена через оси x,y. Линия узлов N
- 8. 7. Общая система уравнений Эйлера движения ТТ вокруг неподвижной точки ДС КС + Преимущества системы уравнений
- 9. 8. Стационарное вращение в случае Эйлера При этом угловая скорость будет постоянна и в подвижной системе
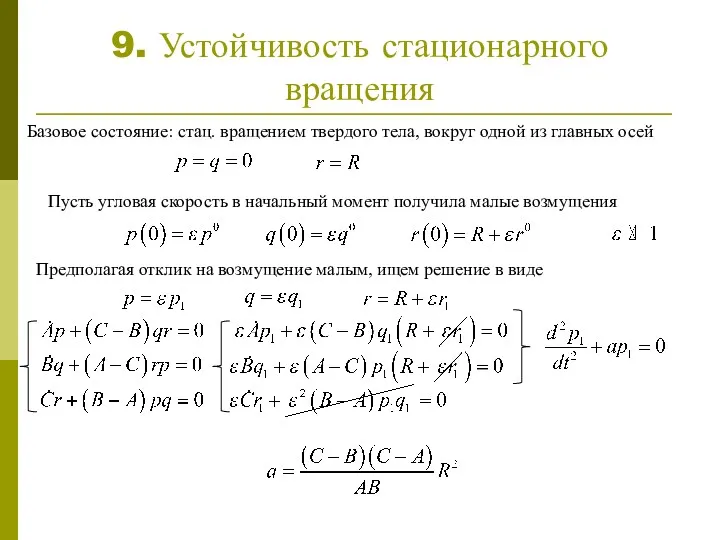
- 10. 9. Устойчивость стационарного вращения Базовое состояние: стац. вращением твердого тела, вокруг одной из главных осей Пусть
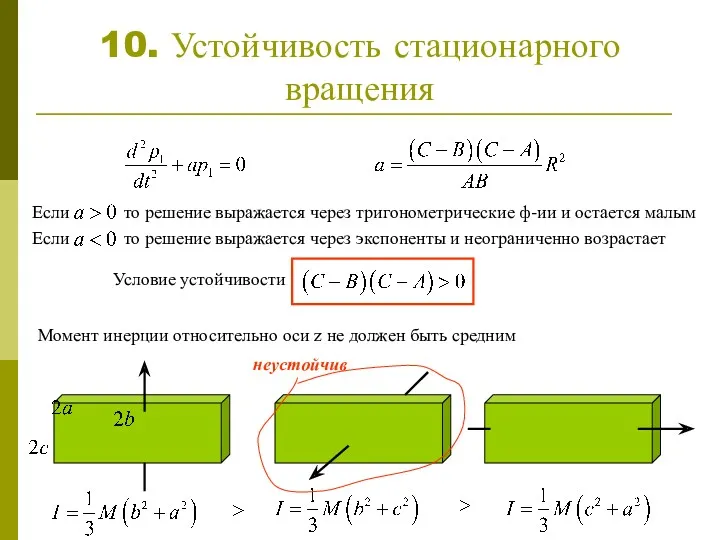
- 11. 10. Устойчивость стационарного вращения Если то решение выражается через тригонометрические ф-ии и остается малым Если то
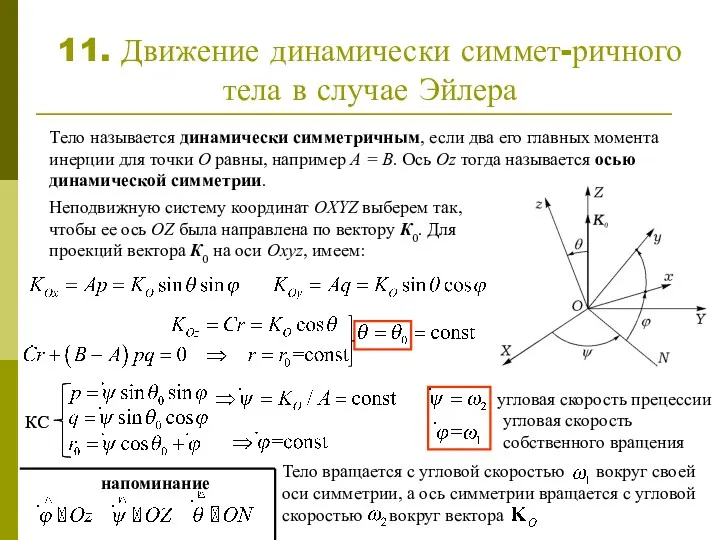
- 12. 11. Движение динамически симмет-ричного тела в случае Эйлера Тело называется динамически симметричным, если два его главных
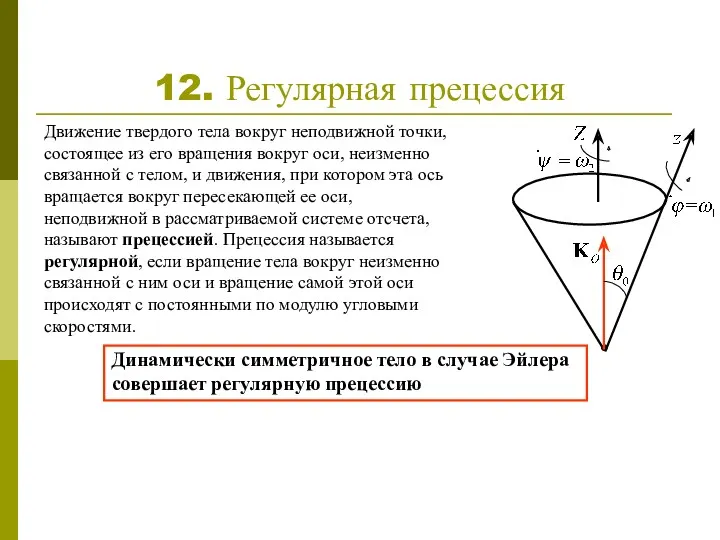
- 13. 12. Регулярная прецессия Движение твердого тела вокруг неподвижной точки, состоящее из его вращения вокруг оси, неизменно
- 15. Скачать презентацию
1. Обозначения
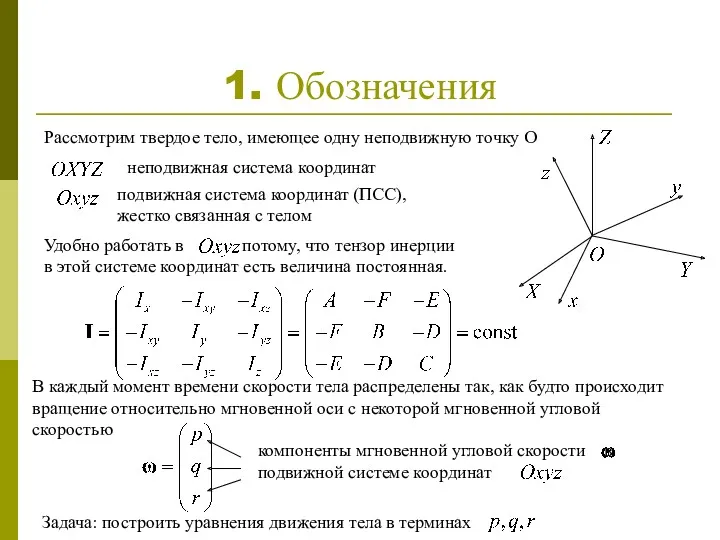
Рассмотрим твердое тело, имеющее одну неподвижную точку О
неподвижная система координат
подвижная
1. Обозначения
Рассмотрим твердое тело, имеющее одну неподвижную точку О
неподвижная система координат
подвижная
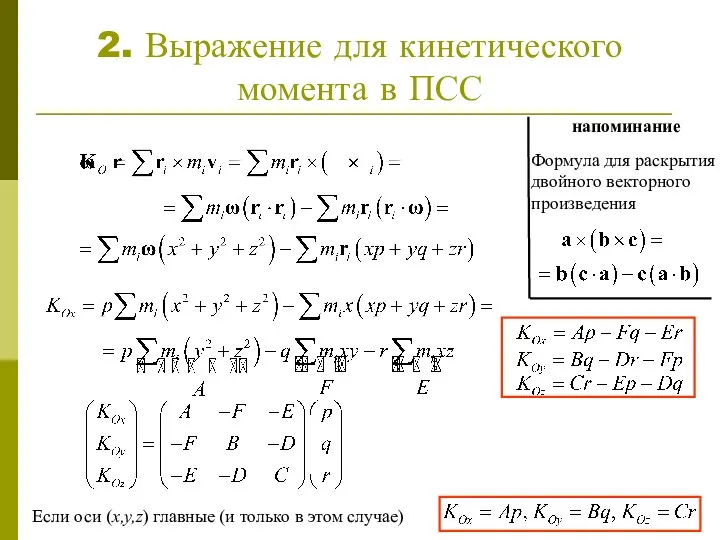
2. Выражение для кинетического момента в ПСС
напоминание
Если оси (x,y,z) главные (и
2. Выражение для кинетического момента в ПСС
напоминание
Если оси (x,y,z) главные (и
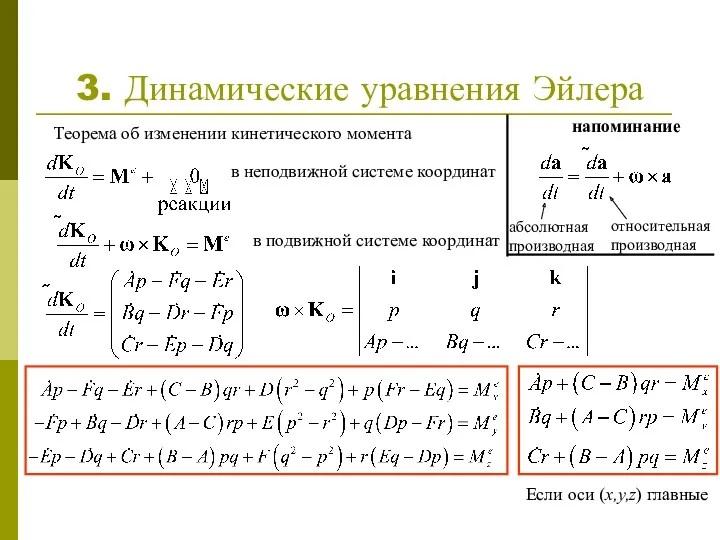
3. Динамические уравнения Эйлера
абсолютная производная
относительная производная
напоминание
Теорема об изменении кинетического момента
в неподвижной
3. Динамические уравнения Эйлера
абсолютная производная
относительная производная
напоминание
Теорема об изменении кинетического момента
в неподвижной
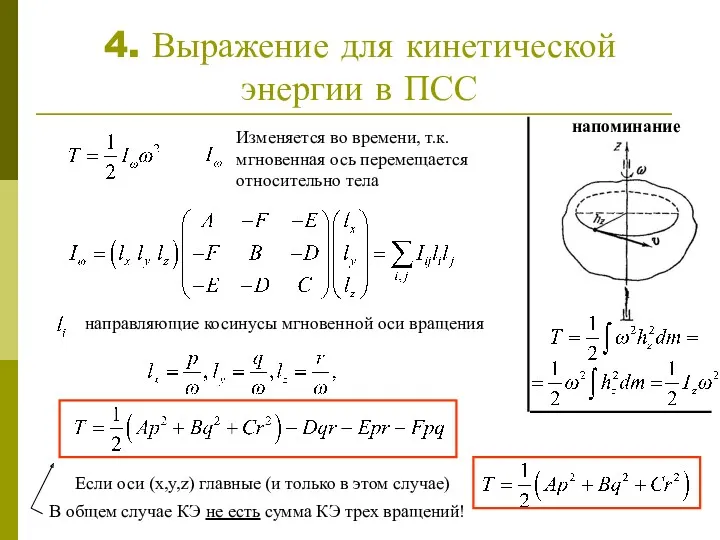
4. Выражение для кинетической энергии в ПСС
напоминание
Изменяется во времени, т.к. мгновенная
4. Выражение для кинетической энергии в ПСС
напоминание
Изменяется во времени, т.к. мгновенная
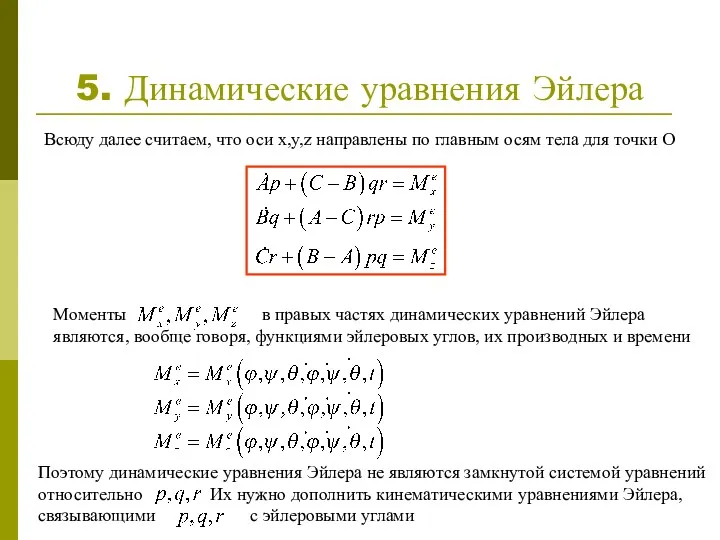
Моменты в правых частях динамических уравнений Эйлера являются, вообще говоря, функциями
Моменты в правых частях динамических уравнений Эйлера являются, вообще говоря, функциями
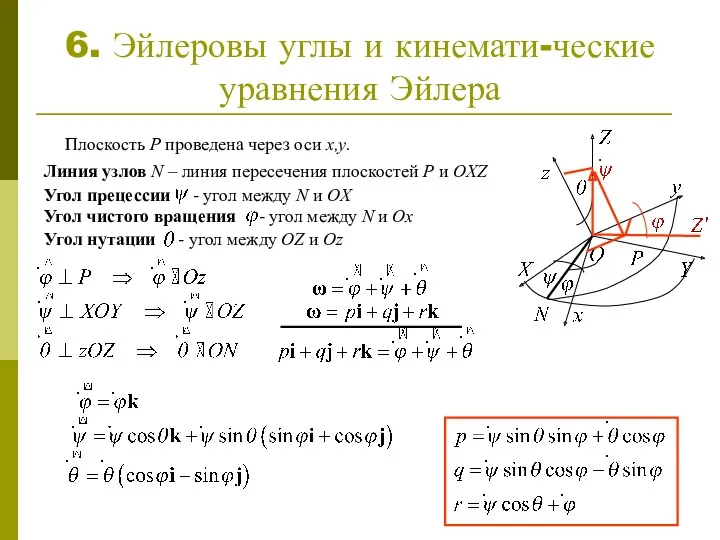
6. Эйлеровы углы и кинемати-ческие уравнения Эйлера
Плоскость Р проведена через оси
6. Эйлеровы углы и кинемати-ческие уравнения Эйлера
Плоскость Р проведена через оси
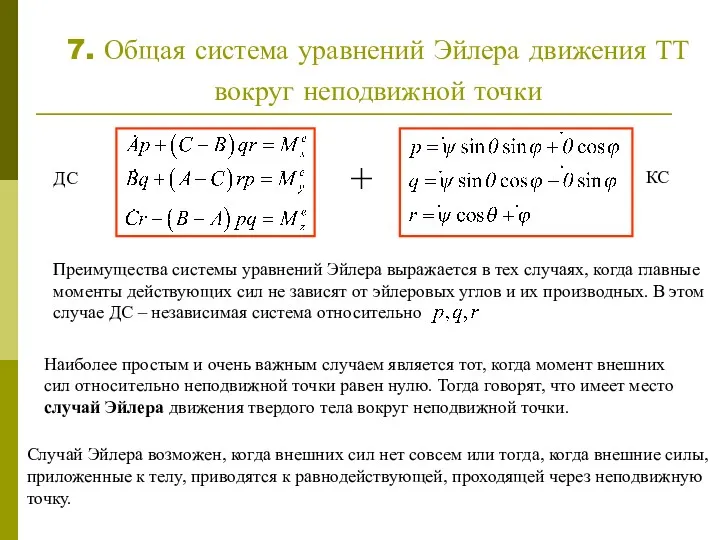
7. Общая система уравнений Эйлера движения ТТ вокруг неподвижной точки
ДС
КС
+
Преимущества
7. Общая система уравнений Эйлера движения ТТ вокруг неподвижной точки
ДС
КС
+
Преимущества
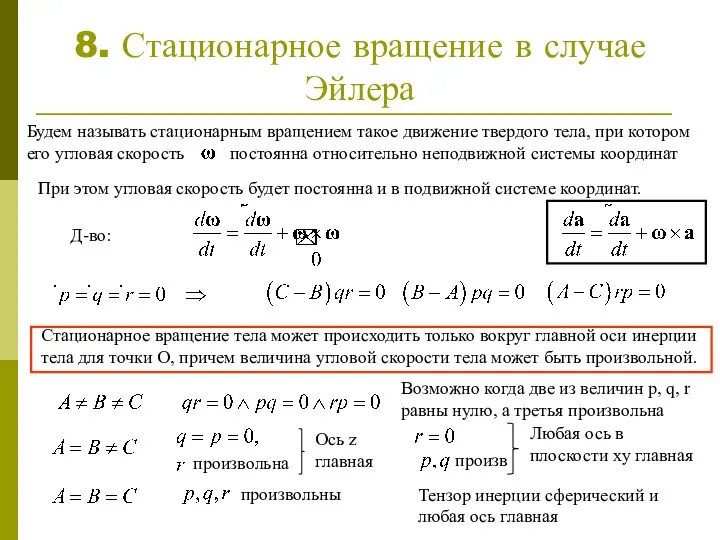
8. Стационарное вращение в случае Эйлера
При этом угловая скорость будет постоянна
8. Стационарное вращение в случае Эйлера
При этом угловая скорость будет постоянна
9. Устойчивость стационарного вращения
Базовое состояние: стац. вращением твердого тела, вокруг одной
9. Устойчивость стационарного вращения
Базовое состояние: стац. вращением твердого тела, вокруг одной
10. Устойчивость стационарного вращения
Если то решение выражается через тригонометрические ф-ии и
10. Устойчивость стационарного вращения
Если то решение выражается через тригонометрические ф-ии и
11. Движение динамически симмет-ричного тела в случае Эйлера
Тело называется динамически симметричным,
11. Движение динамически симмет-ричного тела в случае Эйлера
Тело называется динамически симметричным,
12. Регулярная прецессия
Движение твердого тела вокруг неподвижной точки, состоящее из его
12. Регулярная прецессия
Движение твердого тела вокруг неподвижной точки, состоящее из его
 Элективный курс Методы решения физических задач
Элективный курс Методы решения физических задач Теорія електричних та електронних кіл
Теорія електричних та електронних кіл LXE10E Piping diagram
LXE10E Piping diagram Интерференция света
Интерференция света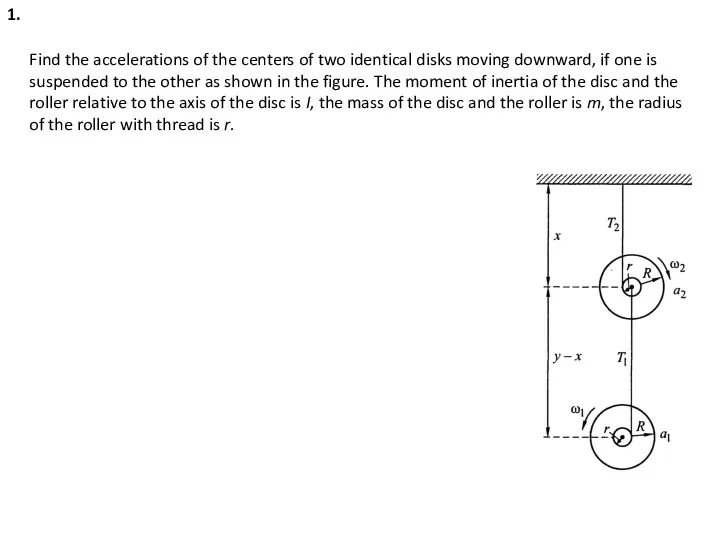 Find the acceleration centers of two identical disks moving down
Find the acceleration centers of two identical disks moving down Електричний струм. Закон Ома
Електричний струм. Закон Ома Оптика – это раздел физики, в котором изучаются световые явления
Оптика – это раздел физики, в котором изучаются световые явления Метод фазированных решеток. Базовые понятия
Метод фазированных решеток. Базовые понятия Истечение газов и паров
Истечение газов и паров Колебательный контур. Свободные и вынужденные электромагнитные колебания
Колебательный контур. Свободные и вынужденные электромагнитные колебания Роль домашнего и демонстрационного эксперимента в формировании интереса учащихся к изучению физики
Роль домашнего и демонстрационного эксперимента в формировании интереса учащихся к изучению физики Основные понятия и определения. Структурный анализ механизмов
Основные понятия и определения. Структурный анализ механизмов Электр станцияларының электр жабдықтары: аккумуляторлық, конденсаторлық қондырғылар
Электр станцияларының электр жабдықтары: аккумуляторлық, конденсаторлық қондырғылар Сила трения
Сила трения Коэффициент полезного действия (КПД) механизма
Коэффициент полезного действия (КПД) механизма История развития мотоиндустрии
История развития мотоиндустрии Тема урока. Решение задач по теме: Электрические явления.
Тема урока. Решение задач по теме: Электрические явления.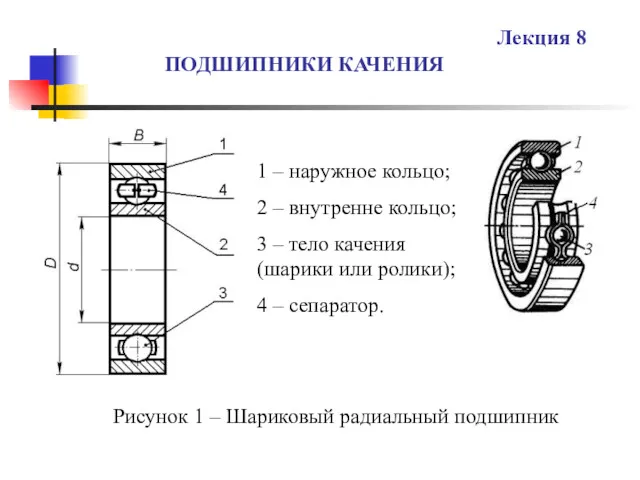 Подшипники качения. (Лекция 8)
Подшипники качения. (Лекция 8) Свет в нашей жизни.
Свет в нашей жизни. Основы слесарно-сборочных и электромонтажных работ. Обязанности электромонтера по ремонту и обслуживанию электрооборудования
Основы слесарно-сборочных и электромонтажных работ. Обязанности электромонтера по ремонту и обслуживанию электрооборудования Гидравлический пресс
Гидравлический пресс Потенциальная энергия
Потенциальная энергия Физика – фундаментальная наука о природе
Физика – фундаментальная наука о природе Використання лазерів в медицині
Використання лазерів в медицині 8. Плоскопараллельное движение твердого тела (плоское)
8. Плоскопараллельное движение твердого тела (плоское) Динамика материальной точки
Динамика материальной точки Измерение времени. (2 класс)
Измерение времени. (2 класс) Модуль: Физика будущего
Модуль: Физика будущего