- Эхометод измерения глубины

Содержание
- 3. Обозначим время прохождения расстояния от ВИ до дна и обратно до ВП через t. Путь S,
- 5. 1. Источник энергии (ИЭ), предназначен для обеспечения работы мощного передающего устройства. 2. Блок запуска (БЗ), предназначен
- 6. 5. Антенный переключатель (АП), предназначен для переключения приемо-передающей антенны с передачи на прием и обратно. 6.
- 7. 8. Устройства отображения информации (УОИ) могут использоваться одного или нескольких типов: - Самописец, предназначен для графического
- 8. ИНДИКАТОР Навигационный эхолот Furuno F-2000
- 9. Навигационный эхолот JRC JFE-582 Указатель глубины эхолота NASA Clipper Depth
- 10. Указатель глубины навигационного эхолота НЭЛ-5
- 11. Основные параметры эхолота К основным эксплуатационным параметрам относятся: - максимальная дальность действия, - разрешающая способность по
- 12. Максимальная дальность действия зависит от технических параметров аппаратуры (мощность излучения, чувствительность приемника), условий распространения звука в
- 13. Под мертвой зоной rmin понимают минимальную глубину обнаружения ею объекта. Размер мертвой зоны зависит от длительности
- 14. Точность измерения глубины Погрешности измерения могут быть подразделены на: инструментальные и методические. Инструментальные вызваны несовершенством конструкции
- 15. 2. Погрешность, обусловленная наклоном дна. Навигационные эхолоты имеют определенную направленность излучения (ДН). Вследствие наличия конуса рассеивания
- 16. ТЕХНИЧЕСКИЕ ПАРАМЕТРЫ ЭХОЛОТА Мощность излучения - один из основных технических параметров. Большая мощность необходима для измерения
- 17. Ширина диаграммы направленности (ДН) выбирается в зависимости от назначения эхолота, требуемой дальности обнаружения, разрешающей способности, влияния
- 18. Узкие ХН антенны обеспечивают: - концентрацию энергии в небольшом телесном угле (Д ↑ при меньшей излучаемой
- 19. Параметры зондирующих импульсов Импульсы различаются по форме огибающей, по заполняющей частоте, длительности и частоте следования. Чаще
- 20. Рабочая частота Это одна из основных технических характеристик эхолота. С одной стороны, увеличение fр приводит к
- 21. Частота следования зондирующих импульсов Частота Fп определяет количество принимаемых эхо-сигналов в единицу времени т. е. информации
- 22. Коэффициент усиления Коэффициент усиления приемника определяет чувствительность приемного устройства - способность эхолота выделять слабые отраженные сигналы
- 23. В реальных условиях указанные виды реверберации существуют одновременно, накладываясь друг на друга. Однако в зависимости от
- 26. В современных эхолотах возможно изменение времени и амплитуды ВАРУ. При необходимости, этот режим может быть отключен,
- 27. Выбор места установки антенны 1. Колебания гидродинамического давления при изменении скорости судна в районе антенны должны
- 28. Изображение рельефа дна на экране при движении судна Изображение на экране при неподвижном судне Отображение рельефа
- 29. Если τ = 0,002 сек, то ℓ=1500·0,002=3 м. с·τ/2=1500·0,002/2=1,5 м
- 30. где НЭ – глубина, измеренная эхолотом, м; Cр – расчётная скорость звука в воде (1500 м/с);
- 31. Для практических вычислений скорости звука в воде в МТ-2000 на стр. 267 имеется Таблица 2.9. “Скорость
- 32. Измерение глубин эхолотом Поправки глубины, измеренной эхолотом НК = НЭ + ΔHT + ΔНПР + ΔHυ
- 33. на морях без приливов: HК = HЭ + Т ± ΔHυ на морях с приливами: HК
- 35. Скачать презентацию


Обозначим время прохождения расстояния от ВИ до дна и обратно до
Обозначим время прохождения расстояния от ВИ до дна и обратно до


1. Источник энергии (ИЭ), предназначен для обеспечения работы мощного передающего устройства.
2.
1. Источник энергии (ИЭ), предназначен для обеспечения работы мощного передающего устройства.
2.

5. Антенный переключатель (АП), предназначен для переключения приемо-передающей антенны с передачи
5. Антенный переключатель (АП), предназначен для переключения приемо-передающей антенны с передачи

8. Устройства отображения информации (УОИ) могут использоваться одного или нескольких типов:
-
8. Устройства отображения информации (УОИ) могут использоваться одного или нескольких типов:
-

ИНДИКАТОР
Навигационный эхолот Furuno F-2000
ИНДИКАТОР
Навигационный эхолот Furuno F-2000

Навигационный эхолот JRC JFE-582
Указатель глубины эхолота NASA Clipper Depth
Навигационный эхолот JRC JFE-582
Указатель глубины эхолота NASA Clipper Depth

Указатель глубины навигационного эхолота НЭЛ-5
Указатель глубины навигационного эхолота НЭЛ-5

Основные параметры эхолота
К основным эксплуатационным параметрам относятся:
- максимальная дальность действия,
- разрешающая
Основные параметры эхолота
К основным эксплуатационным параметрам относятся:
- максимальная дальность действия,
- разрешающая

Максимальная дальность действия зависит от технических параметров аппаратуры (мощность излучения, чувствительность
Максимальная дальность действия зависит от технических параметров аппаратуры (мощность излучения, чувствительность

Под мертвой зоной rmin понимают минимальную глубину обнаружения ею объекта. Размер
Под мертвой зоной rmin понимают минимальную глубину обнаружения ею объекта. Размер

Точность измерения глубины
Погрешности измерения могут быть подразделены на: инструментальные и методические.
Точность измерения глубины
Погрешности измерения могут быть подразделены на: инструментальные и методические.

2. Погрешность, обусловленная наклоном дна. Навигационные эхолоты имеют определенную направленность излучения
2. Погрешность, обусловленная наклоном дна. Навигационные эхолоты имеют определенную направленность излучения

ТЕХНИЧЕСКИЕ ПАРАМЕТРЫ ЭХОЛОТА
Мощность излучения - один из основных технических параметров.
Большая мощность
ТЕХНИЧЕСКИЕ ПАРАМЕТРЫ ЭХОЛОТА
Мощность излучения - один из основных технических параметров.
Большая мощность

Ширина диаграммы направленности (ДН) выбирается в зависимости от назначения эхолота, требуемой
Ширина диаграммы направленности (ДН) выбирается в зависимости от назначения эхолота, требуемой

Узкие ХН антенны обеспечивают:
- концентрацию энергии в небольшом телесном угле
Узкие ХН антенны обеспечивают:
- концентрацию энергии в небольшом телесном угле

Параметры зондирующих импульсов
Импульсы различаются по форме огибающей, по заполняющей частоте, длительности
Параметры зондирующих импульсов
Импульсы различаются по форме огибающей, по заполняющей частоте, длительности

Рабочая частота
Это одна из основных технических характеристик эхолота.
С одной
Рабочая частота
Это одна из основных технических характеристик эхолота.
С одной

Частота следования зондирующих импульсов
Частота Fп определяет количество принимаемых эхо-сигналов в единицу
Частота следования зондирующих импульсов
Частота Fп определяет количество принимаемых эхо-сигналов в единицу

Коэффициент усиления
Коэффициент усиления приемника определяет чувствительность приемного устройства - способность эхолота
Коэффициент усиления
Коэффициент усиления приемника определяет чувствительность приемного устройства - способность эхолота

В реальных условиях указанные виды реверберации существуют одновременно, накладываясь друг на



В современных эхолотах возможно изменение времени и амплитуды ВАРУ. При необходимости,
В современных эхолотах возможно изменение времени и амплитуды ВАРУ. При необходимости,

Выбор места установки антенны
1. Колебания гидродинамического давления при изменении скорости судна
Выбор места установки антенны
1. Колебания гидродинамического давления при изменении скорости судна

Изображение рельефа дна на экране при движении судна
Изображение на экране при
Изображение рельефа дна на экране при движении судна
Изображение на экране при

Если τ = 0,002 сек, то
ℓ=1500·0,002=3 м.
с·τ/2=1500·0,002/2=1,5 м
Если τ = 0,002 сек, то
ℓ=1500·0,002=3 м.
с·τ/2=1500·0,002/2=1,5 м

где НЭ – глубина, измеренная эхолотом, м;
Cр – расчётная скорость звука
где НЭ – глубина, измеренная эхолотом, м;
Cр – расчётная скорость звука

Для практических вычислений скорости звука в воде в МТ-2000 на стр.
Для практических вычислений скорости звука в воде в МТ-2000 на стр.

Измерение глубин эхолотом
Поправки глубины, измеренной эхолотом
НК = НЭ + ΔHT +
Измерение глубин эхолотом
Поправки глубины, измеренной эхолотом
НК = НЭ + ΔHT +

на морях без приливов:
HК = HЭ + Т ± ΔHυ
на
на морях без приливов:
HК = HЭ + Т ± ΔHυ
на
 Прав ли был Прометей, давший людям огонь?
Прав ли был Прометей, давший людям огонь? Кран машиниста поезда, с дистанционным управлением №130
Кран машиниста поезда, с дистанционным управлением №130 Команда Пятый Элемент. Почему для полетов в космосе всегда используются ракеты
Команда Пятый Элемент. Почему для полетов в космосе всегда используются ракеты Законы постоянного тока
Законы постоянного тока Основы кристаллографии
Основы кристаллографии Gravitačná sila
Gravitačná sila Передачи гибкой связью. Цепные передачи. Классификация
Передачи гибкой связью. Цепные передачи. Классификация Рамы конструкции и виды
Рамы конструкции и виды Густина речовини. Роз'язування задач
Густина речовини. Роз'язування задач Гидравлический подъемник. Выбор насоса
Гидравлический подъемник. Выбор насоса Изменение агрегатных состояний вещества
Изменение агрегатных состояний вещества Радио. История и изобретение радио
Радио. История и изобретение радио Радиоактивность. Виды радиоактивных излучений
Радиоактивность. Виды радиоактивных излучений Организация технического обслуживания и ремонта автомобиля ГАЗ 3308 Садко
Организация технического обслуживания и ремонта автомобиля ГАЗ 3308 Садко Научные фокусы. Электрические тени
Научные фокусы. Электрические тени Автоматическое сцепное устройство на примере автосцепки СА - 3
Автоматическое сцепное устройство на примере автосцепки СА - 3 Электричество и его использование
Электричество и его использование Презентация. Геометрическая оптика
Презентация. Геометрическая оптика Обобщение опыта. Использование личностно-ориентированного подхода с элементами дифференцированного обучения на уроках физики
Обобщение опыта. Использование личностно-ориентированного подхода с элементами дифференцированного обучения на уроках физики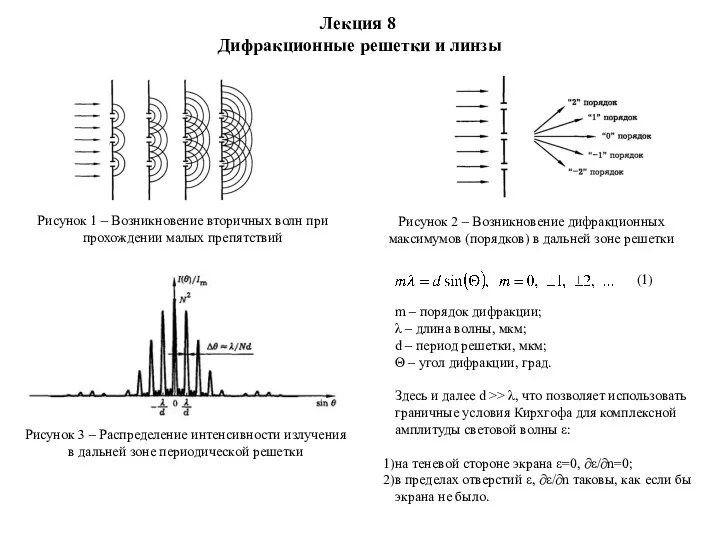 Дифракционные решетки и линзы. Лекция 8
Дифракционные решетки и линзы. Лекция 8 Интерактивная мозаика-2017. Знатоки физики 8 класс
Интерактивная мозаика-2017. Знатоки физики 8 класс Расчет систем с конструктивной нелинейностью на сейсмические, ветровые воздействия и устойчивость. Расчетная модель гибкой мачты
Расчет систем с конструктивной нелинейностью на сейсмические, ветровые воздействия и устойчивость. Расчетная модель гибкой мачты Электрическая дуга. Вольтова дуга, дуговой разряд
Электрическая дуга. Вольтова дуга, дуговой разряд Физика туралы ғылым
Физика туралы ғылым Жылуөткізгіштік, конвекция, сәуле шығару
Жылуөткізгіштік, конвекция, сәуле шығару Ремонт КШМ двигателя Д-240
Ремонт КШМ двигателя Д-240 Векторная диаграмма токов и напряжений
Векторная диаграмма токов и напряжений Электрический ток в различных средах. Закономерность протекания тока
Электрический ток в различных средах. Закономерность протекания тока