- Кинематический анализ шарнирно-рычажных механизмов

Содержание
- 2. Основные понятия Механизмами называют изолированную часть некоторой механической системы (без источников и потребителей энергии), предназначенную для
- 3. Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с. «Вопрос о том, какие механизмы
- 4. Звенья шарнирно-рычажных механизмов Стойка – неподвижное звено механизма, на котором закреплены все другие его звенья. Кривошип
- 5. Различные варианты определения «кулисы» Кулиса – звено, вращающееся относительно подвижной оси (с направляющими для ползуна -
- 6. Варианты кулисных механизмов
- 7. Вращательное движение относительно неподвижной оси Р(a,b): Поступательное движение Sin(0)=0 Cos(0)=1 Переход от плоскопараллельного движения к вращательному
- 8. Координаты, компоненты скорости и ускорения для кривошипа Компоненты вектора ускорения О А Компоненты вектора скорости x
- 9. Координаты, компоненты скорости и ускорения для коромысла О А Компоненты вектора скорости Координаты Компоненты вектора ускорения
- 10. Координаты, компоненты скорости и ускорения для шатуна Уравнения движения в форме Лагранжа Компоненты скорости: в форме
- 11. Координаты, компоненты скорости и ускорения для ползуна Уравнения движения Компоненты вектора перемещения Компоненты вектора ускорения Компоненты
- 12. Кинематические связи в шарнирно - рычажных механизмах Кинематическими связями называют соотношения между постоянными (расстояния между осями
- 13. Кривошипно-ползунный механизм b b
- 14. Кривошипно-ползунный механизм (расчет через координаты точки А) А А b
- 15. Кривошипно-ползунный механизм. Другой вариант записи кинематических связей Н L1 L2 =const
- 16. Кривошипно-коромысловый механизм O A B L2 L1 O1 C1 C2 M L3 X Y C3 ϕ
- 17. Кривошипно-коромысловый механизм ; (a)
- 18. Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла ; (a) Из системы (а) получаем 4
- 19. Соотношения между угловыми скоростями для кривошипно-коромыслового механизма Дифференцируем систему уравнений (а) (см. сл. 16-18) по времени
- 20. Решение системы линейных уравнений по методу Крамера Исходная система и ее основной определитель «Дополнительные определители» Решение
- 21. Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма Дифференцируем систему уравнений (b) (см. сл. 19) по времени
- 22. Кулисный механизм. Угловые характеристики AE=
- 23. Кулисные механизмы. Направляющая с неподвижной осью
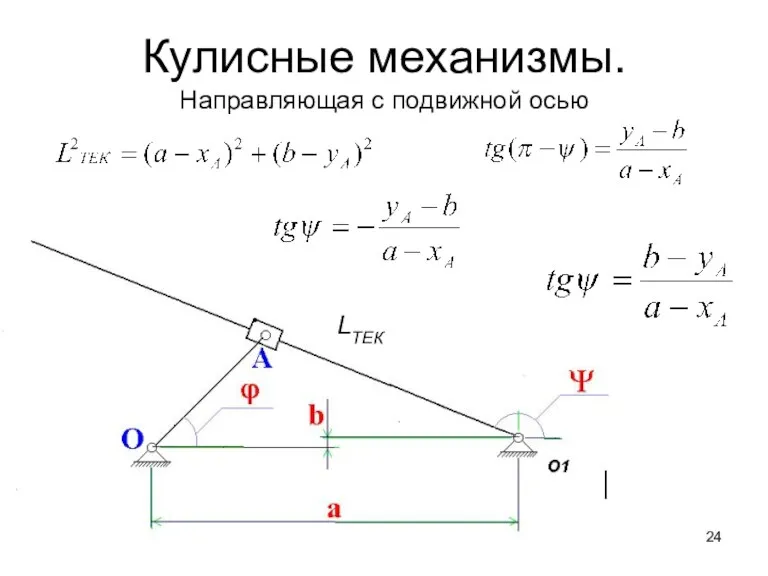
- 24. Кулисные механизмы. Направляющая с подвижной осью LТЕК
- 25. Все механизмы отличаются кинематическими связями. Число возможных вариантов механизмов и кинематических связей бесконечно.
- 26. КУЛИСНАЯ ПАРА С ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
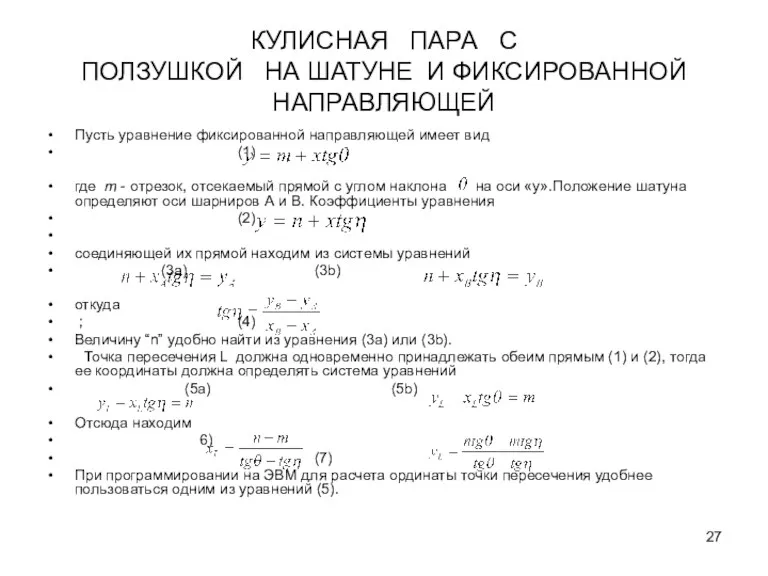
- 27. КУЛИСНАЯ ПАРА С ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ Пусть уравнение фиксированной направляющей имеет вид (1)
- 28. УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА Уравнение прямой, вдоль которой движется ползун (1) где
- 29. F, D – оси шарниров, соединяющих шатун с смежными звеньями. К- точка пересечения перпендикуляра, опущенного из
- 30. Расстояние от точки Р(хР, уР) до прямой А*х + В*у + С = 0 определяет уравнение
- 31. Два коромысла с кулисной парой
- 32. Два коромысла с кулисной парой - 2 D(x D,yD) K(x K,yK) O1(a,b) mu Teta Ksi L4
- 33. Два коромысла с кулисной парой - 3
- 34. Рекомендуемая последовательность кинематического анализа механизма -1 1. Выбрать (получить) кинематическую схему механизма. Преобразовать ее к общему
- 35. Рекомендуемая последовательность кинематического анализа механизма - 2 2. Выбрать предпочтительную систему координат, наиболее удобную для математического
- 36. Рекомендуемая последовательность кинематического анализа механизма-3 3. Для выбора допустимых соотношений расстояний между осями шарниров, обеспечивающих работоспособность
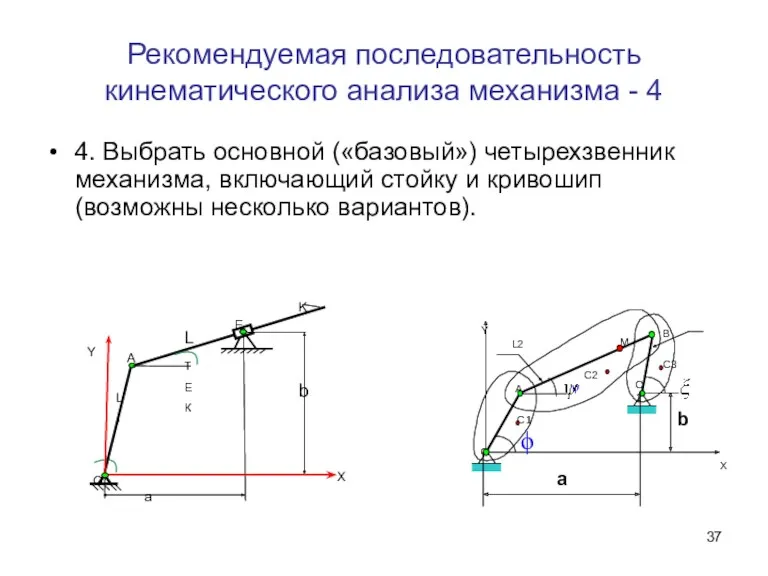
- 37. Рекомендуемая последовательность кинематического анализа механизма - 4 4. Выбрать основной («базовый») четырехзвенник механизма, включающий стойку и
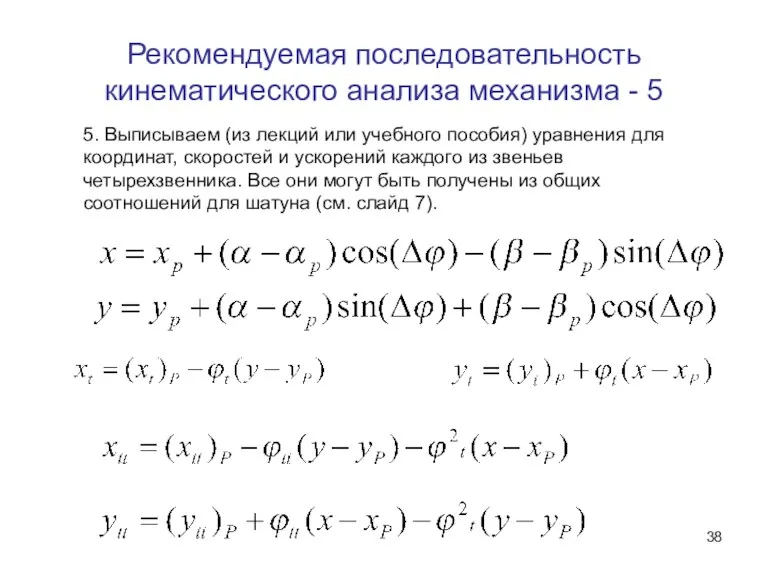
- 38. Рекомендуемая последовательность кинематического анализа механизма - 5 5. Выписываем (из лекций или учебного пособия) уравнения для
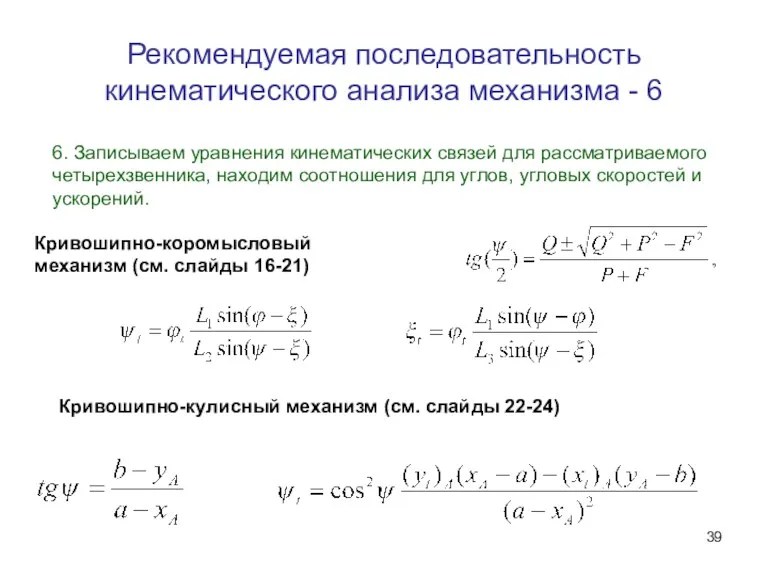
- 39. Рекомендуемая последовательность кинематического анализа механизма - 6 6. Записываем уравнения кинематических связей для рассматриваемого четырехзвенника, находим
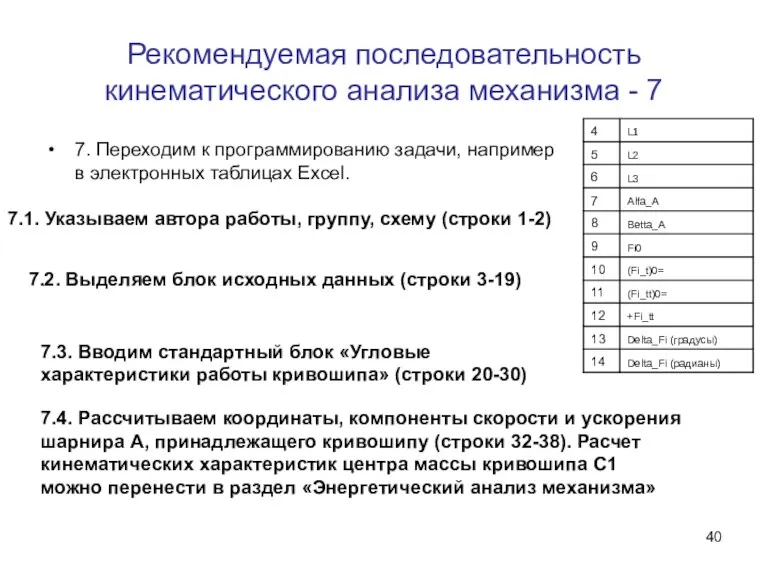
- 40. Рекомендуемая последовательность кинематического анализа механизма - 7 7. Переходим к программированию задачи, например в электронных таблицах
- 41. Рекомендуемая последовательность кинематического анализа механизма - 8 Переходим к программированию блока «Кинематические связи» 8.1. Вводим промежуточные
- 42. Рекомендуемая последовательность кинематического анализа механизма - 9 Переходим к программированию кинематических характеристик ведомых звеньев четырехзвенника 9.1.
- 43. Рекомендуемая последовательность кинематического анализа механизма - 10 Через каждые 5-8 строк программы проводим проверку результатов кинематических
- 45. Скачать презентацию
Основные понятия
Механизмами называют изолированную часть некоторой механической системы (без источников и
Основные понятия
Механизмами называют изолированную часть некоторой механической системы (без источников и
Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с.
«Вопрос
Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с.
«Вопрос
Звенья шарнирно-рычажных механизмов
Стойка – неподвижное звено механизма, на котором закреплены все
Звенья шарнирно-рычажных механизмов
Стойка – неподвижное звено механизма, на котором закреплены все
Различные варианты определения «кулисы»
Кулиса – звено, вращающееся относительно подвижной оси (с
Различные варианты определения «кулисы»
Кулиса – звено, вращающееся относительно подвижной оси (с
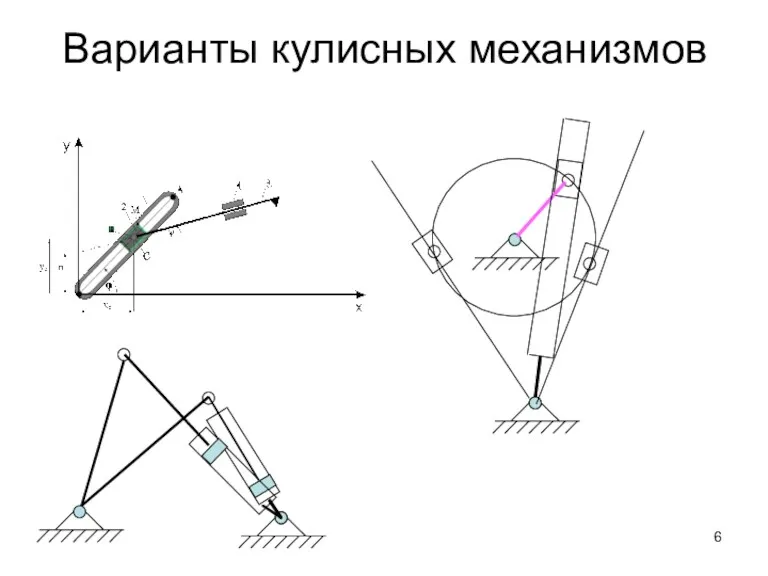
Варианты кулисных механизмов
Варианты кулисных механизмов
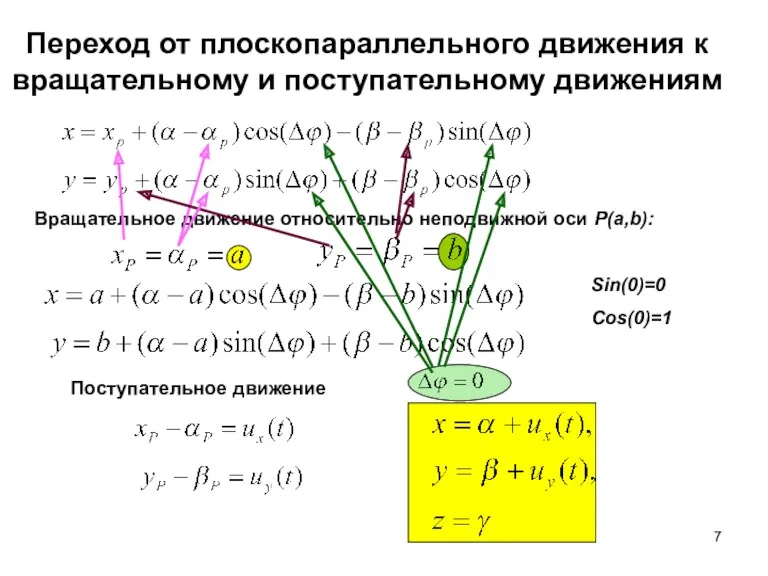
Вращательное движение относительно неподвижной оси Р(a,b):
Поступательное движение
Sin(0)=0
Cos(0)=1
Переход от плоскопараллельного движения
Вращательное движение относительно неподвижной оси Р(a,b):
Поступательное движение
Sin(0)=0
Cos(0)=1
Переход от плоскопараллельного движения
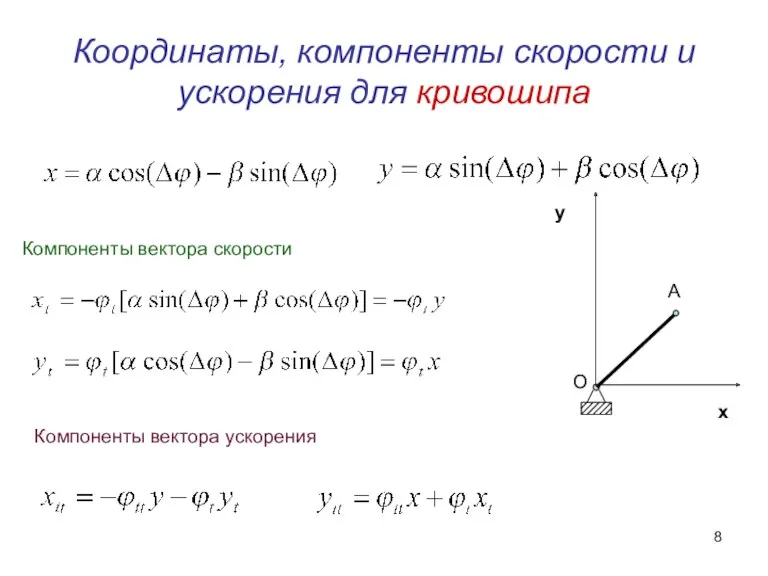
Координаты, компоненты скорости и ускорения для кривошипа
Компоненты вектора ускорения
О
А
Компоненты вектора
Координаты, компоненты скорости и ускорения для кривошипа
Компоненты вектора ускорения
О
А
Компоненты вектора
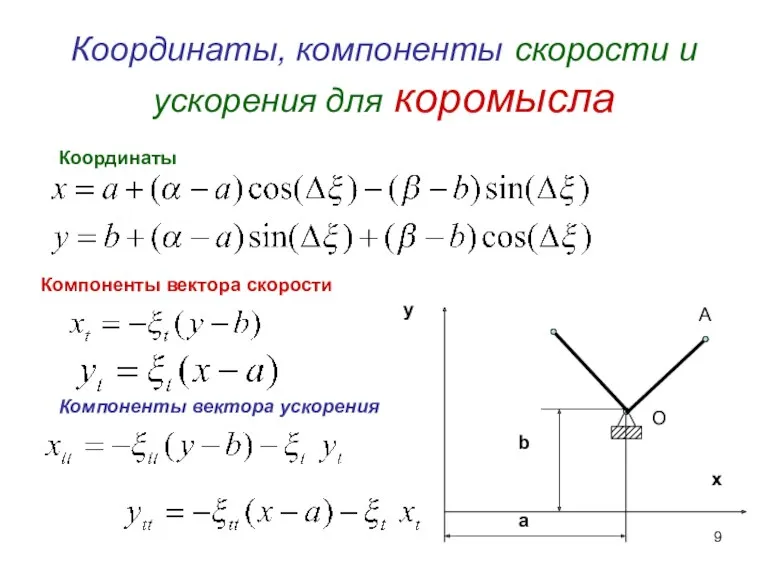
Координаты, компоненты скорости и ускорения для коромысла
О
А
Компоненты вектора скорости
Координаты
Компоненты вектора ускорения
b
a
y
x
Координаты, компоненты скорости и ускорения для коромысла
О
А
Компоненты вектора скорости
Координаты
Компоненты вектора ускорения
b
a
y
x
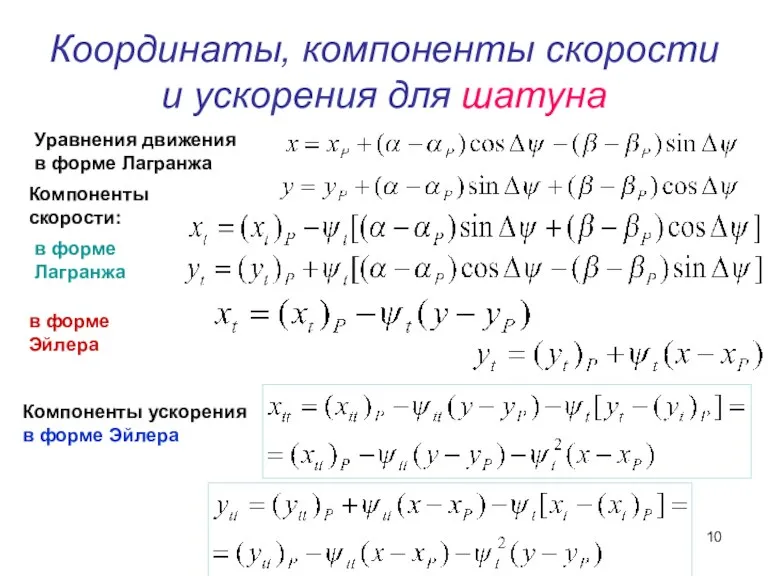
Координаты, компоненты скорости и ускорения для шатуна
Уравнения движения в форме Лагранжа
Компоненты
Координаты, компоненты скорости и ускорения для шатуна
Уравнения движения в форме Лагранжа
Компоненты
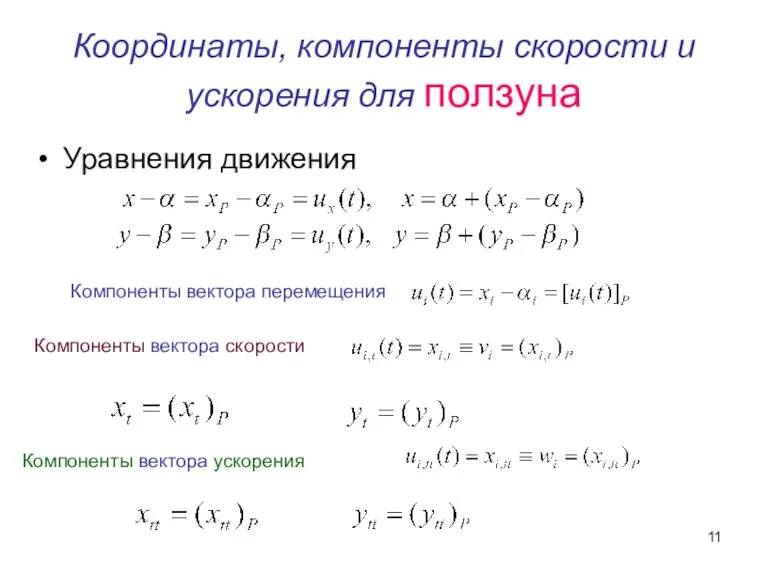
Координаты, компоненты скорости и ускорения для ползуна
Уравнения движения
Компоненты вектора перемещения
Компоненты
Координаты, компоненты скорости и ускорения для ползуна
Уравнения движения
Компоненты вектора перемещения
Компоненты
Кинематические связи
в шарнирно - рычажных механизмах
Кинематическими связями называют соотношения между
Кинематические связи
в шарнирно - рычажных механизмах
Кинематическими связями называют соотношения между
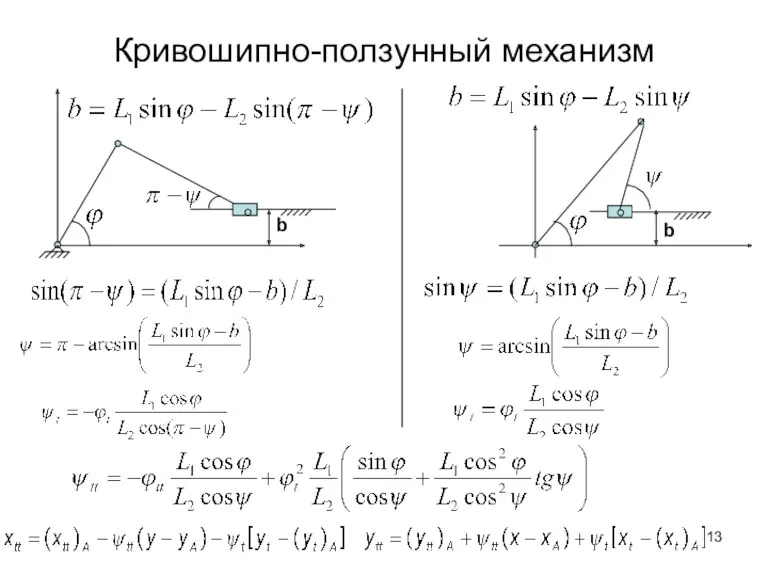
Кривошипно-ползунный механизм
b
b
Кривошипно-ползунный механизм
b
b
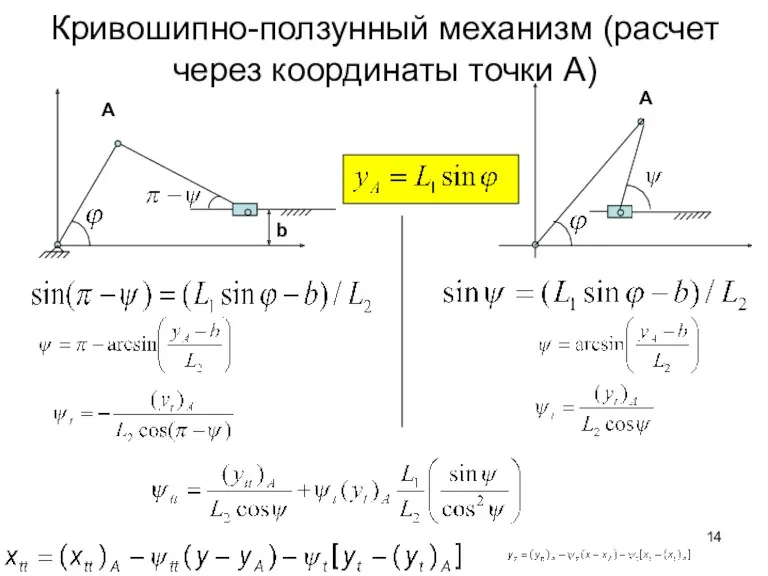
Кривошипно-ползунный механизм (расчет через координаты точки А)
А
А
b
Кривошипно-ползунный механизм (расчет через координаты точки А)
А
А
b
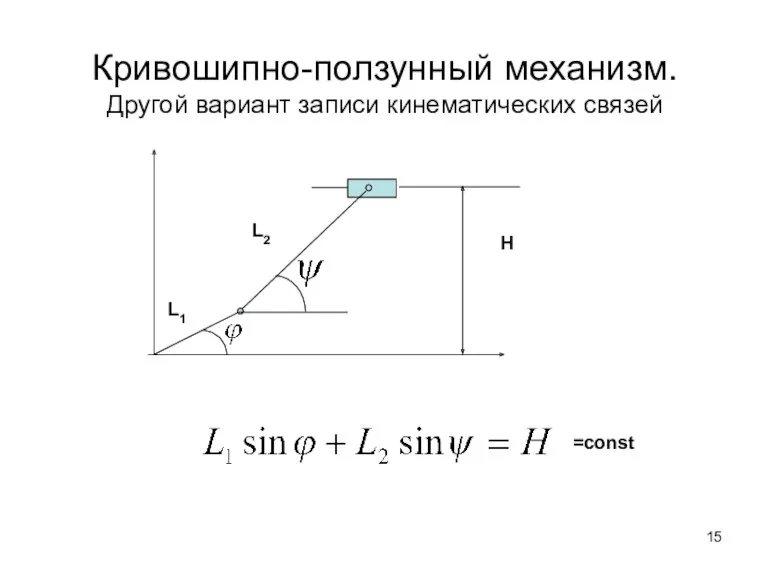
Кривошипно-ползунный механизм. Другой вариант записи кинематических связей
Н
L1
L2
=const
Кривошипно-ползунный механизм. Другой вариант записи кинематических связей
Н
L1
L2
=const
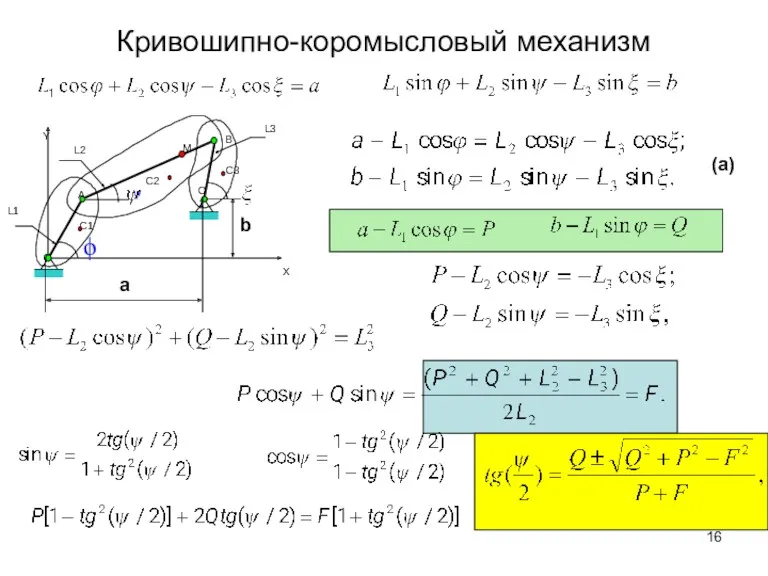
Кривошипно-коромысловый механизм
O
A
B
L2
L1
O1
C1
C2
M
L3
X
Y
C3
ϕ
ψ
b
a
(a)
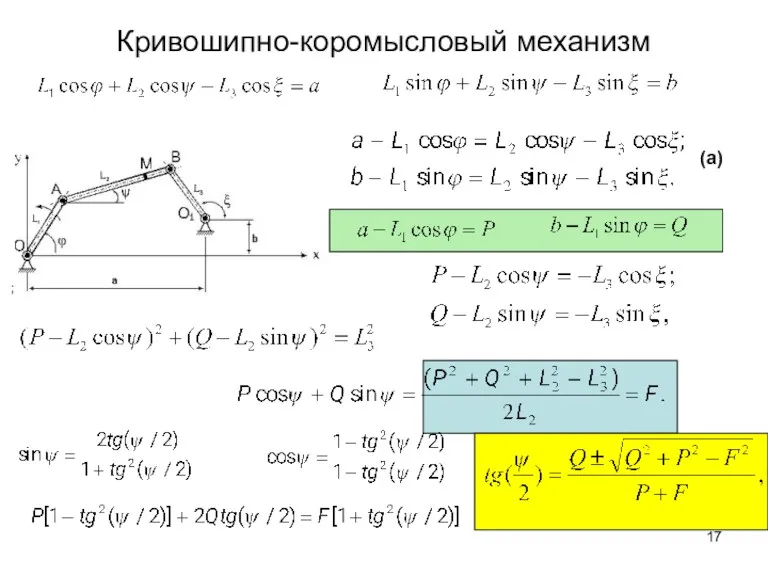
Кривошипно-коромысловый механизм
O
A
B
L2
L1
O1
C1
C2
M
L3
X
Y
C3
ϕ
ψ
b
a
(a)
Кривошипно-коромысловый механизм
;
(a)
Кривошипно-коромысловый механизм
;
(a)
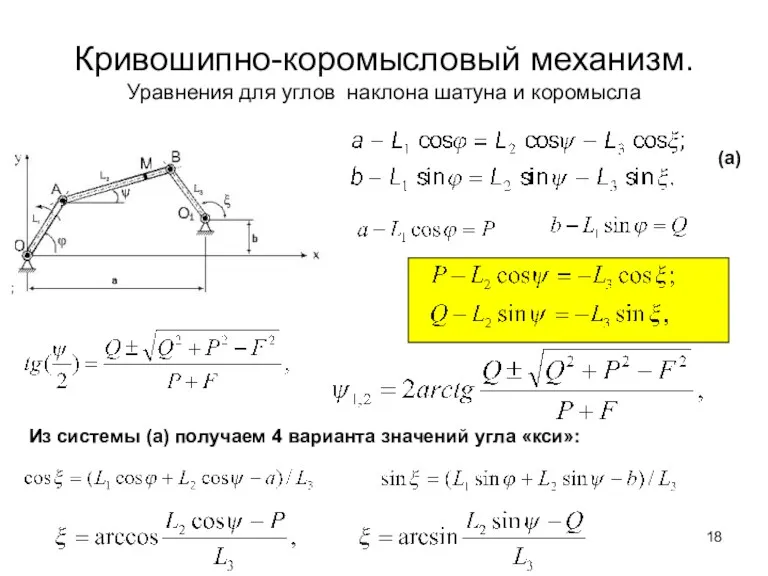
Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла
;
(a)
Из
Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла
;
(a)
Из
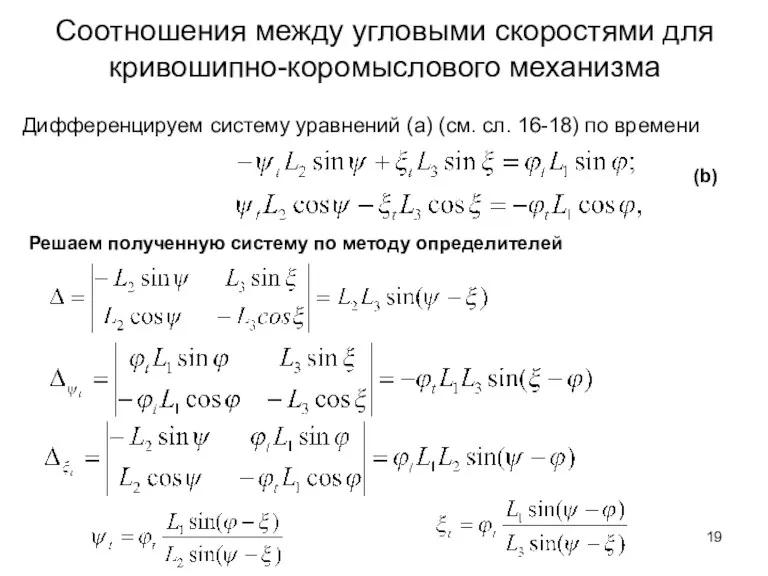
Соотношения между угловыми скоростями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (а) (см.
Соотношения между угловыми скоростями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (а) (см.
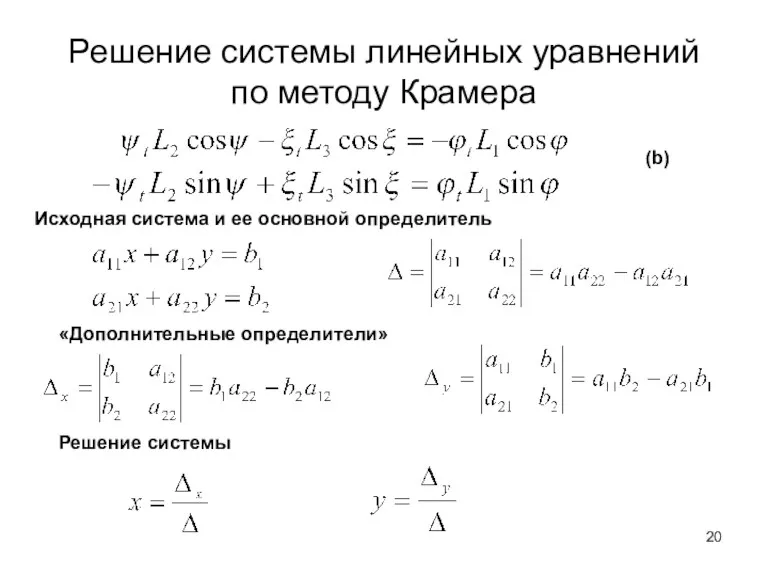
Решение системы линейных уравнений по методу Крамера
Исходная система и ее основной
Решение системы линейных уравнений по методу Крамера
Исходная система и ее основной
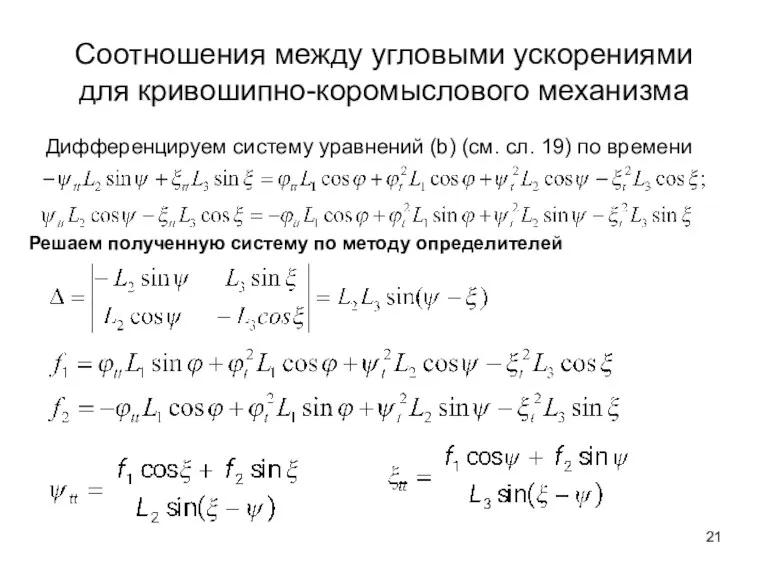
Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (b) (см.
Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (b) (см.

Кулисный механизм. Угловые характеристики
AE=
Кулисный механизм. Угловые характеристики
AE=

Кулисные механизмы.
Направляющая с неподвижной осью
Кулисные механизмы.
Направляющая с неподвижной осью
Кулисные механизмы.
Направляющая с подвижной осью
LТЕК
Кулисные механизмы.
Направляющая с подвижной осью
LТЕК
Все механизмы отличаются кинематическими связями.
Число возможных вариантов механизмов и кинематических связей
Все механизмы отличаются кинематическими связями.
Число возможных вариантов механизмов и кинематических связей
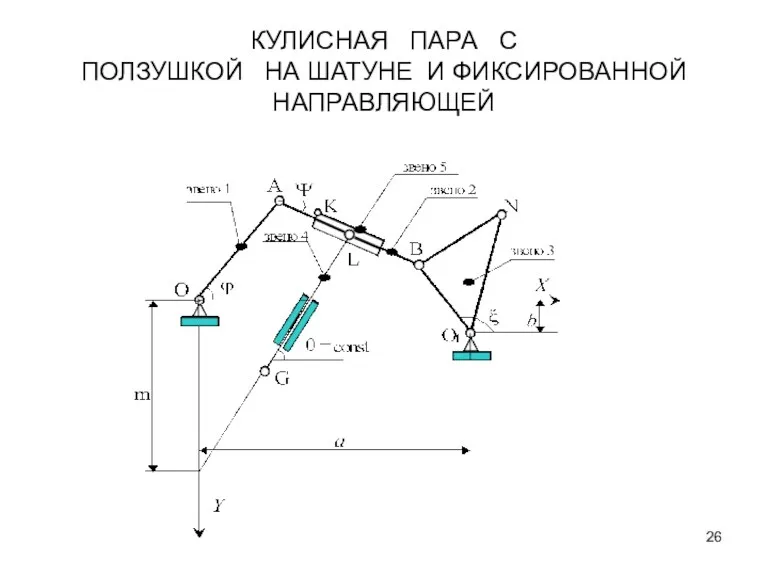
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
Пусть уравнение фиксированной направляющей
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
Пусть уравнение фиксированной направляющей
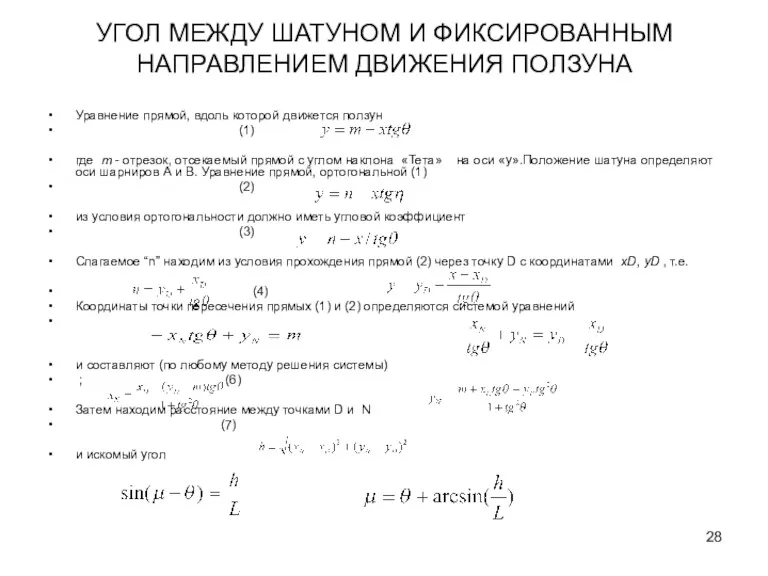
УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА
Уравнение прямой, вдоль
УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА
Уравнение прямой, вдоль
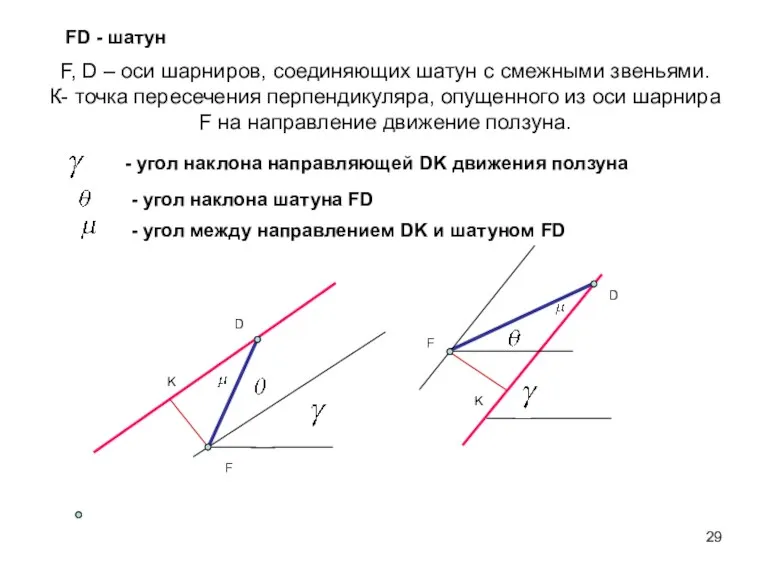
F, D – оси шарниров, соединяющих шатун с смежными звеньями.
К- точка
F, D – оси шарниров, соединяющих шатун с смежными звеньями. К- точка
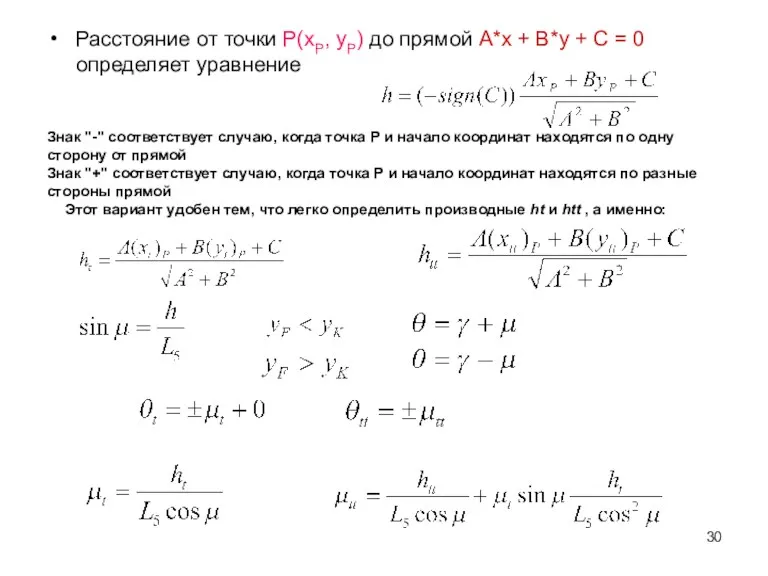
Расстояние от точки Р(хР, уР) до прямой А*х + В*у +
Расстояние от точки Р(хР, уР) до прямой А*х + В*у +

Два коромысла с кулисной парой
Два коромысла с кулисной парой
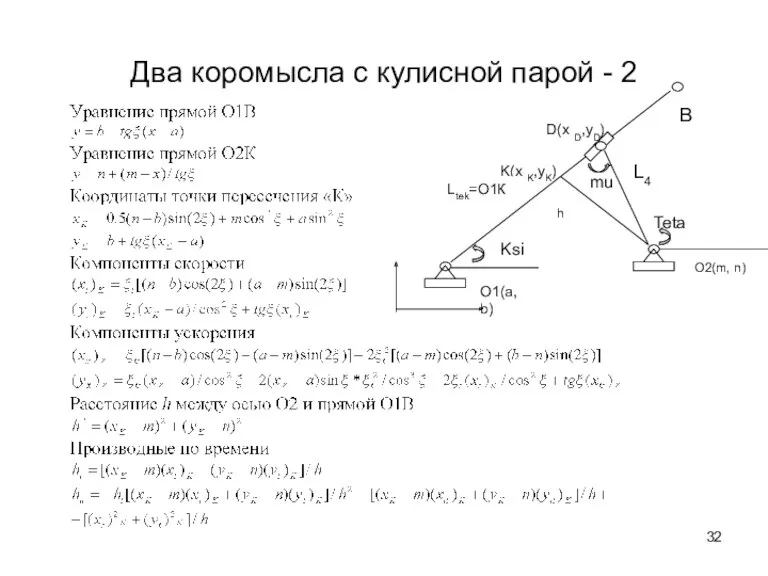
Два коромысла с кулисной парой - 2
D(x D,yD)
K(x K,yK)
O1(a,b)
mu
Teta
Ksi
L4
B
O2(m, n)
h
Ltek=O1К
Два коромысла с кулисной парой - 2
D(x D,yD)
K(x K,yK)
O1(a,b)
mu
Teta
Ksi
L4
B
O2(m, n)
h
Ltek=O1К
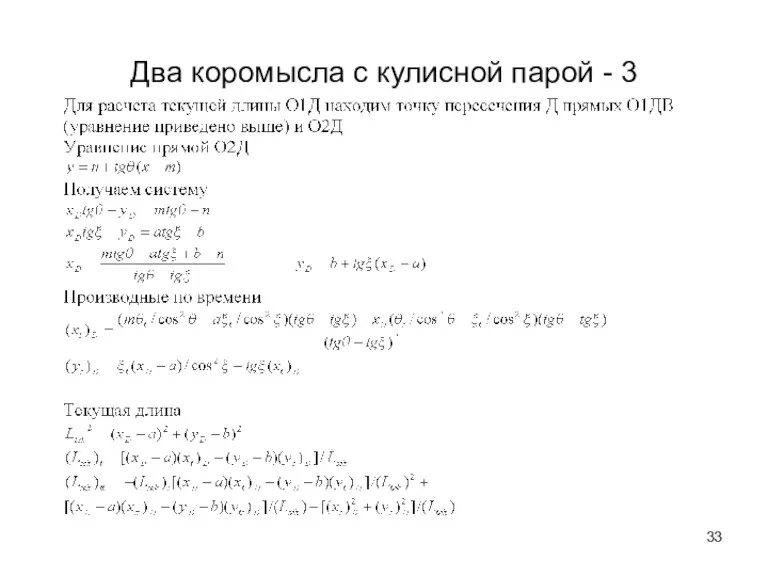
Два коромысла с кулисной парой - 3
Два коромысла с кулисной парой - 3
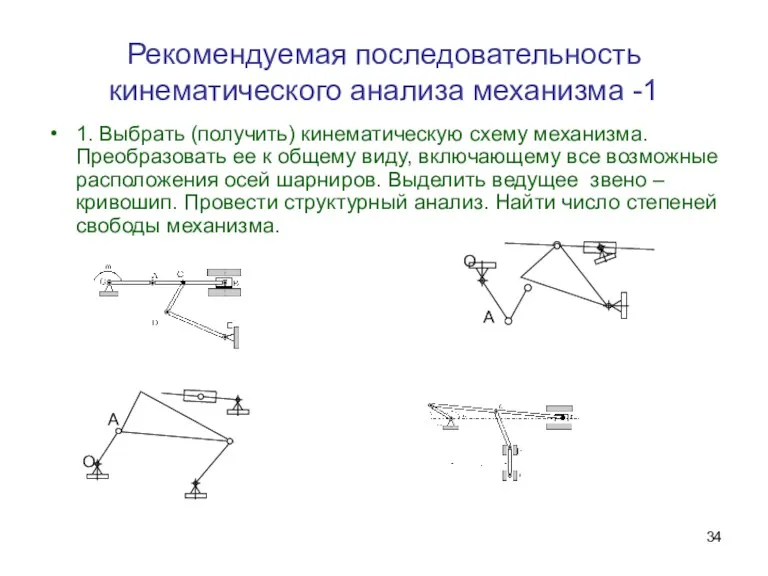
Рекомендуемая последовательность кинематического анализа механизма -1
1. Выбрать (получить) кинематическую схему механизма.
Рекомендуемая последовательность кинематического анализа механизма -1
1. Выбрать (получить) кинематическую схему механизма.
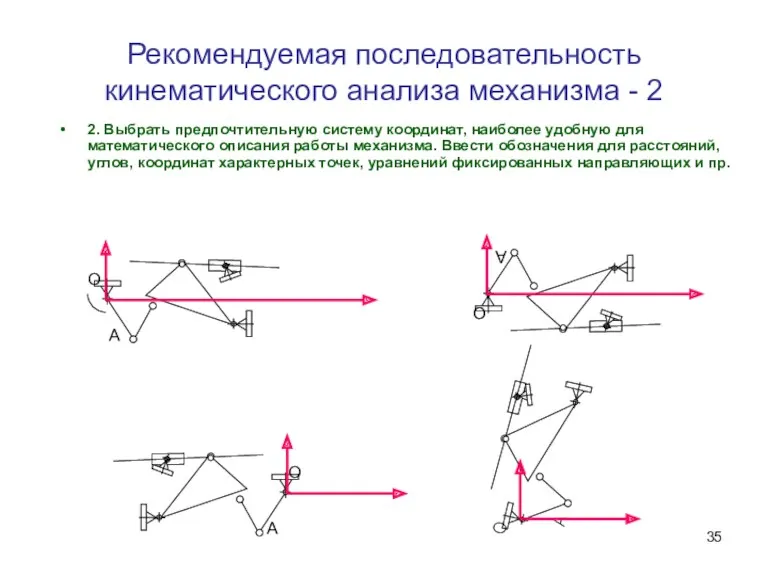
Рекомендуемая последовательность кинематического анализа механизма - 2
2. Выбрать предпочтительную систему координат,
Рекомендуемая последовательность кинематического анализа механизма - 2
2. Выбрать предпочтительную систему координат,
Рекомендуемая последовательность кинематического
анализа механизма-3
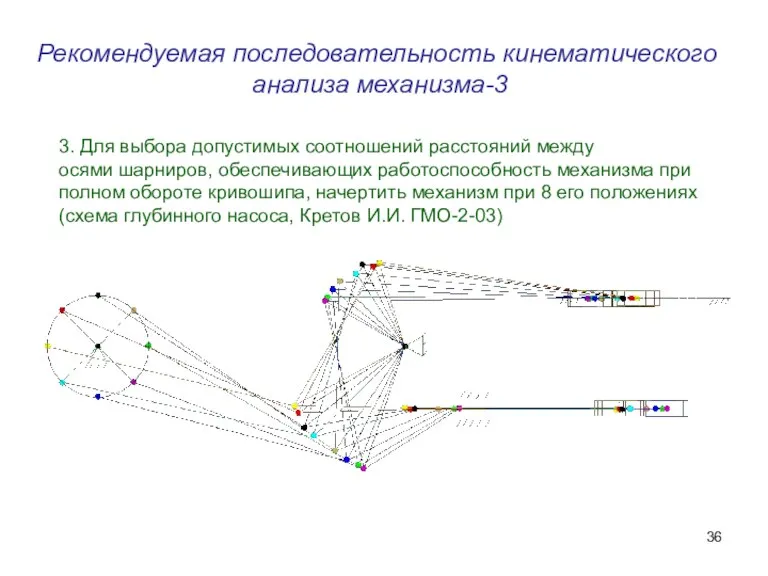
3. Для выбора допустимых соотношений расстояний между
осями
Рекомендуемая последовательность кинематического
анализа механизма-3
3. Для выбора допустимых соотношений расстояний между
осями
Рекомендуемая последовательность кинематического анализа механизма - 4
4. Выбрать основной («базовый») четырехзвенник
Рекомендуемая последовательность кинематического анализа механизма - 4
4. Выбрать основной («базовый») четырехзвенник
Рекомендуемая последовательность кинематического анализа механизма - 5
5. Выписываем (из лекций или
Рекомендуемая последовательность кинематического анализа механизма - 5
5. Выписываем (из лекций или
Рекомендуемая последовательность кинематического анализа механизма - 6
6. Записываем уравнения кинематических связей
Рекомендуемая последовательность кинематического анализа механизма - 6
6. Записываем уравнения кинематических связей
Рекомендуемая последовательность кинематического анализа механизма - 7
7. Переходим к программированию задачи,
Рекомендуемая последовательность кинематического анализа механизма - 7
7. Переходим к программированию задачи,
Рекомендуемая последовательность кинематического анализа механизма - 8
Переходим к программированию блока «Кинематические
Рекомендуемая последовательность кинематического анализа механизма - 8
Переходим к программированию блока «Кинематические
Рекомендуемая последовательность кинематического анализа механизма - 9
Переходим к программированию кинематических характеристик
Рекомендуемая последовательность кинематического анализа механизма - 9
Переходим к программированию кинематических характеристик
Рекомендуемая последовательность кинематического анализа механизма - 10
Через каждые 5-8 строк программы
Рекомендуемая последовательность кинематического анализа механизма - 10
Через каждые 5-8 строк программы
 Физические свойства нефти и газа. Физические свойства нефти. Фазовые диаграммы. Газосодержание. Объемный коэффициент нефти
Физические свойства нефти и газа. Физические свойства нефти. Фазовые диаграммы. Газосодержание. Объемный коэффициент нефти Поляризация света
Поляризация света Презентация к уроку по теме Механическая работа 7 класс
Презентация к уроку по теме Механическая работа 7 класс Интерактивный учебный курс по изучению темы Оптика
Интерактивный учебный курс по изучению темы Оптика Конкурс по физике. Исследования в области энергосбережения
Конкурс по физике. Исследования в области энергосбережения Отражение света. Преломление света
Отражение света. Преломление света Теорія великого вибуху
Теорія великого вибуху Виды сил
Виды сил Установка для получения угольного топлива
Установка для получения угольного топлива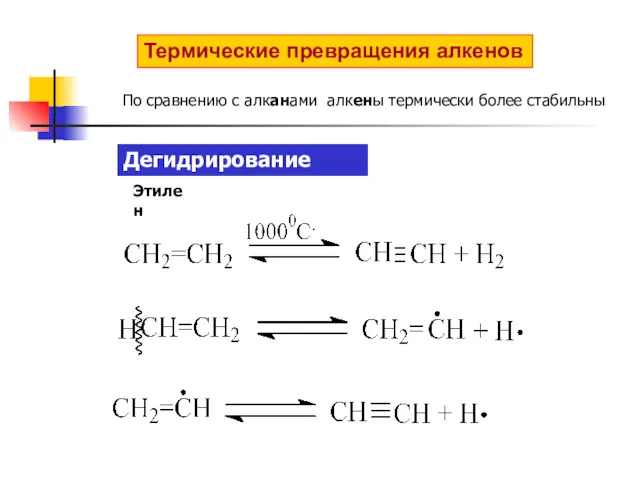 Термические превращения алкенов
Термические превращения алкенов Haemodynamics Haemorheology
Haemodynamics Haemorheology STARIA(US4)/Неисправность датчика EGTS T3
STARIA(US4)/Неисправность датчика EGTS T3 Что изучает физика? Некоторые физические термины
Что изучает физика? Некоторые физические термины Правило Ленца. Явление самоиндукции
Правило Ленца. Явление самоиндукции Бинарный урок Исследование зависимости между параметрами колебаний пружинного и нитяного маятников
Бинарный урок Исследование зависимости между параметрами колебаний пружинного и нитяного маятников Параллельное соединение проводников
Параллельное соединение проводников Урок по теме Механическая работа 7 класс
Урок по теме Механическая работа 7 класс Газовые законы — повторительно-обобщающий урок
Газовые законы — повторительно-обобщающий урок Свойства воды
Свойства воды Массоперенос между фазами и в пределах фазы. (Темы 5.1 - 5.2)
Массоперенос между фазами и в пределах фазы. (Темы 5.1 - 5.2)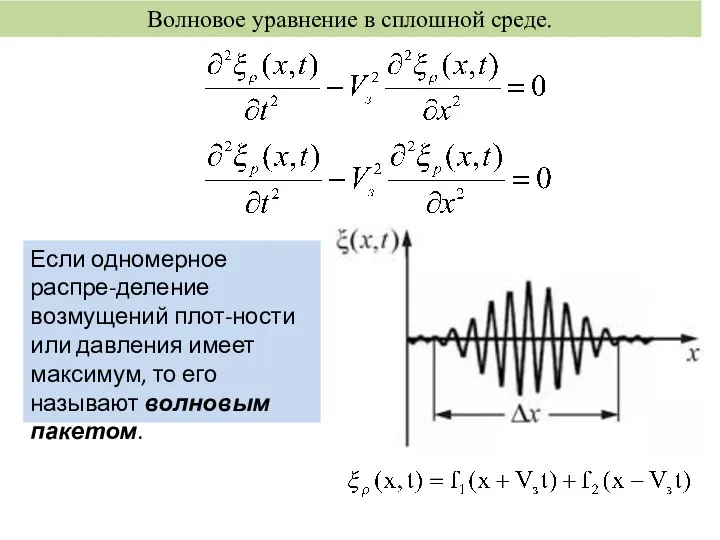 Волновое уравнение в сплошной среде
Волновое уравнение в сплошной среде Теоретическая механика. Динамика. (Лекции 1-6)
Теоретическая механика. Динамика. (Лекции 1-6) Магнитное поле
Магнитное поле Электризация тел
Электризация тел Кинематика (основные понятия)
Кинематика (основные понятия) Курс лекций по сопротивлению материалов
Курс лекций по сопротивлению материалов Теория относительности Эйнштейна
Теория относительности Эйнштейна Трёхфазные цепи
Трёхфазные цепи