- Кинематическое исследование механизмов и машин

Содержание
- 2. Функция положения механизма это зависимость углового или линейного перемещения точки звена или звена механизма от времени
- 3. Кинематические передаточные функции механизма – производные от функции положения по обобщенной коор-динате. Первая производная называется первой
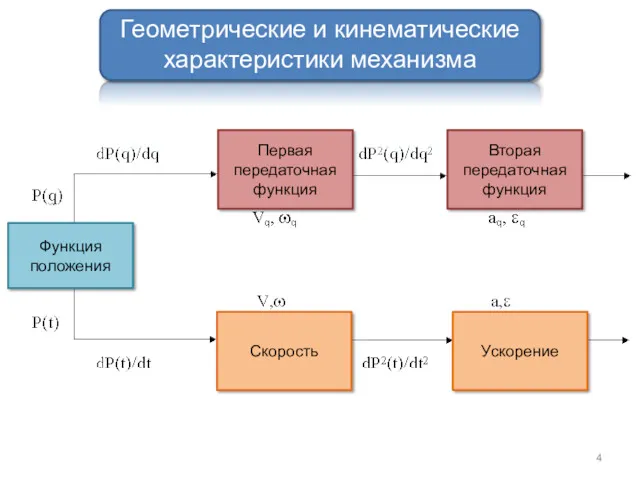
- 4. Геометрические и кинематические характеристики механизма
- 5. Механизм с одной подвижностью имеет одно заданное входное движение и некоторое множество выходных (движение любого звена
- 6. Схема механической системы Схема включает входное звено (1), зубчатую передачу (звенья 1-2) , кулачковый (звенья 2-3-4)
- 7. Блок-схема рассмотренной механической системы
- 8. Функции положения в механизмах
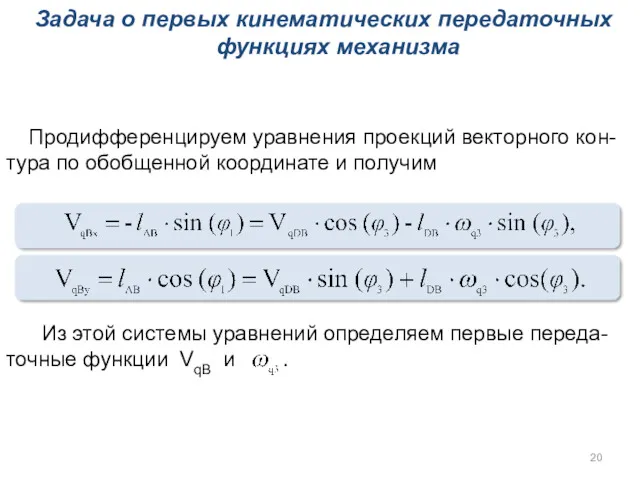
- 9. Линейные скорости и ускорения Угловые скорости и ускорения Связь кинематических и передаточных функций
- 10. - кинематических диаграмм (графический), - планов положений, скоростей и ускорений (графо-аналитический), - проекций векторного контура (аналитический),
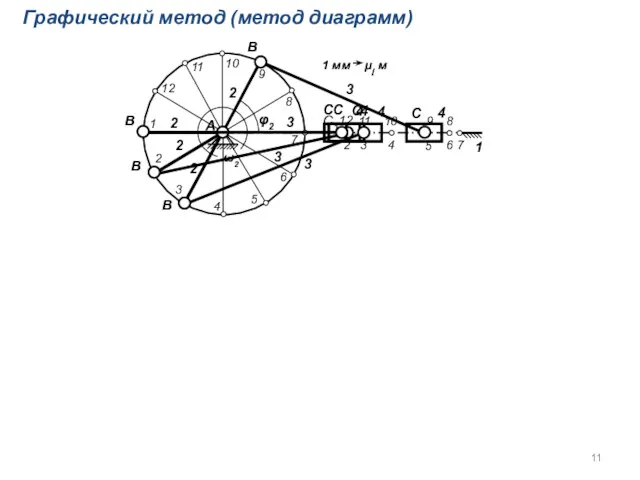
- 11. 2 3 4 6 7 C 4 Графический метод (метод диаграмм) 1 2 3 5 6
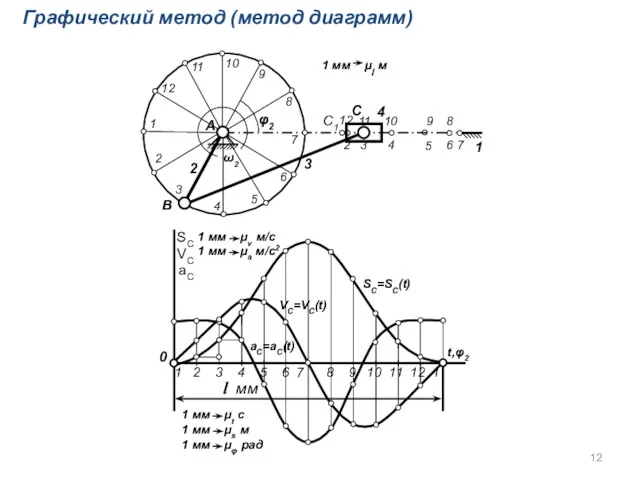
- 12. 2 3 4 6 7 4 Графический метод (метод диаграмм) SC VC aC l мм 1
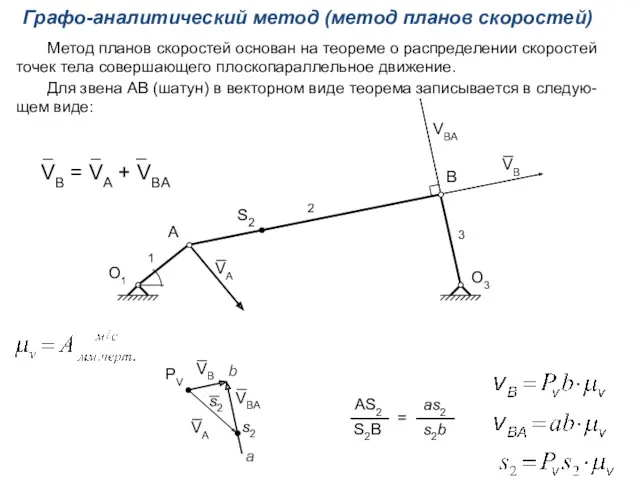
- 13. s2b as2 s2 A B O1 O3 1 2 3 VBA VBA VB VA VB =
- 14. Графо-аналитический метод (метод планов ускорений) Метод планов ускорений основан на теореме о распределении ускорений точек тела
- 15. e s1 f c C d B b p 1 4 E 2 5 F G
- 16. S1 s1 n2 e n6 n3 F d b C B 1 4 E 2 5
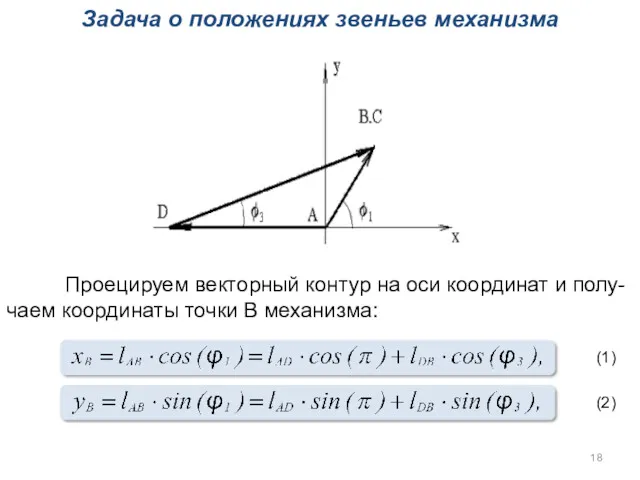
- 17. Рассмотрим простейший кулисный механизм. Заменим кинематическую схему механизма эквивалент-ным векторным контуром. Тогда уравнение замкнутости векторного контура
- 18. Задача о положениях звеньев механизма Проецируем векторный контур на оси координат и полу- чаем координаты точки
- 19. Из решения этой системы уравнений определяем неиз-вестные величины и , которые определяют положение звеньев и точек
- 20. Задача о первых кинематических передаточных функциях механизма Продифференцируем уравнения проекций векторного кон-тура по обобщенной координате и
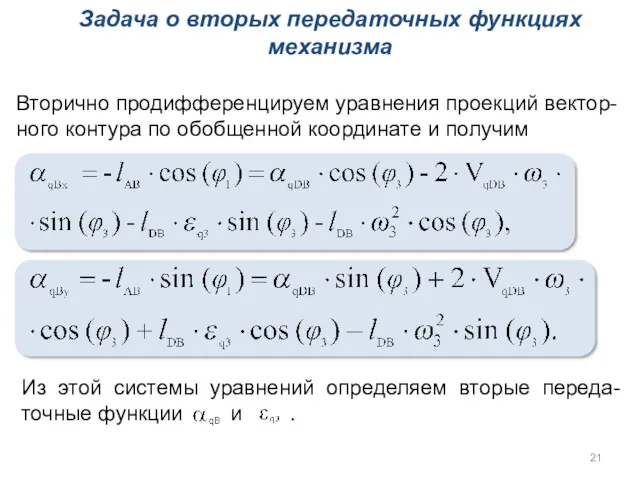
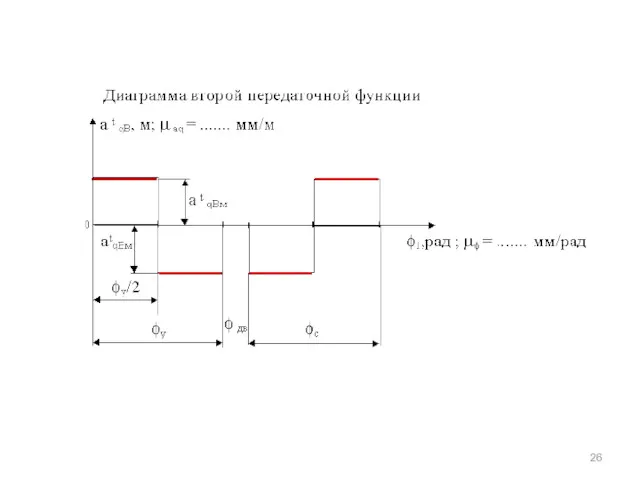
- 21. Задача о вторых передаточных функциях механизма Вторично продифференцируем уравнения проекций вектор-ного контура по обобщенной координате и
- 22. Выполнив вычисления по приве-дённым выше зависимостям, пост-роим соответствующие диаграм-мы.
- 23. Диаграммы функции положения и передаточных функций для зубчатой передачи
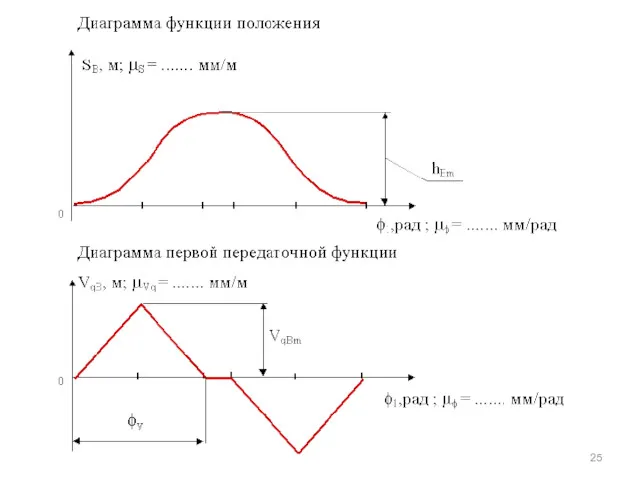
- 24. Диаграммы функции положения и передаточных функций для кулачкового механизма Кинематическая схема и цикловые характеристики кулачкового механизма
- 27. Экспериментальный метод кинематического исследования При экспериментальном исследовании кинематики меха-низмов кинематические характеристики звеньев и точек ме-ханизма определяются
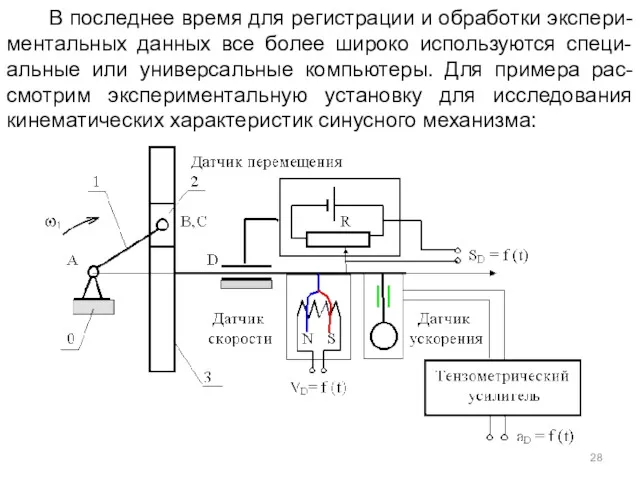
- 28. В последнее время для регистрации и обработки экспери-ментальных данных все более широко используются специ-альные или универсальные
- 29. В этой экспериментальной установке: для измерения перемещения выходного звена исполь-зуется потенциометрический датчик перемещения, в котором пропорционально
- 30. для измерения ускорения выходного звена использу-ется тензометрический акселерометр. Он состоит из плас-тинчатой пружины один конец которой
- 31. Передаточные функции механизмов с несколькими подвижностями (W>1) Рассмотрим простой двухподвижный манипулятор:
- 33. Скачать презентацию
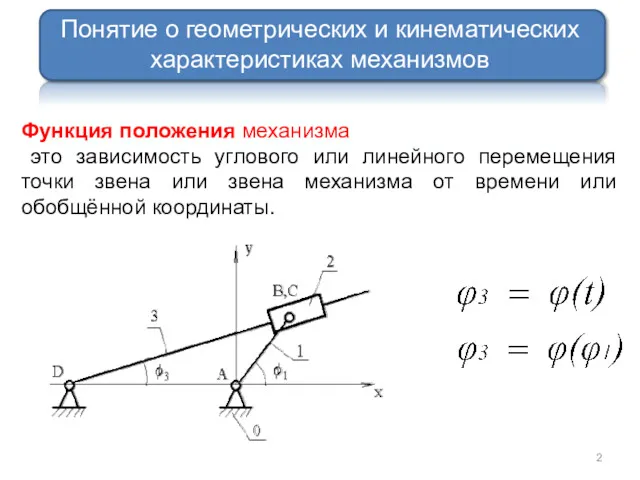
Функция положения механизма
это зависимость углового или линейного перемещения точки звена
Функция положения механизма
это зависимость углового или линейного перемещения точки звена
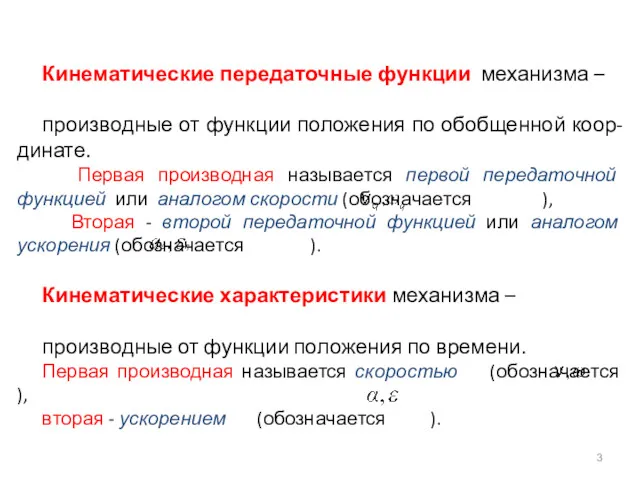
Кинематические передаточные функции механизма –
производные от функции положения по обобщенной коор-динате.
производные от функции положения по обобщенной коор-динате.
Геометрические и кинематические
характеристики механизма
Геометрические и кинематические
характеристики механизма
Механизм с одной подвижностью имеет одно заданное входное движение и некоторое
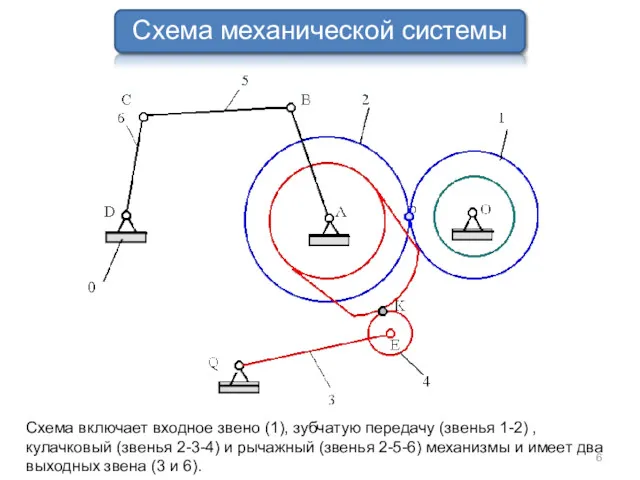
Схема механической системы
Схема включает входное звено (1), зубчатую передачу (звенья 1-2)
Схема механической системы
Схема включает входное звено (1), зубчатую передачу (звенья 1-2)
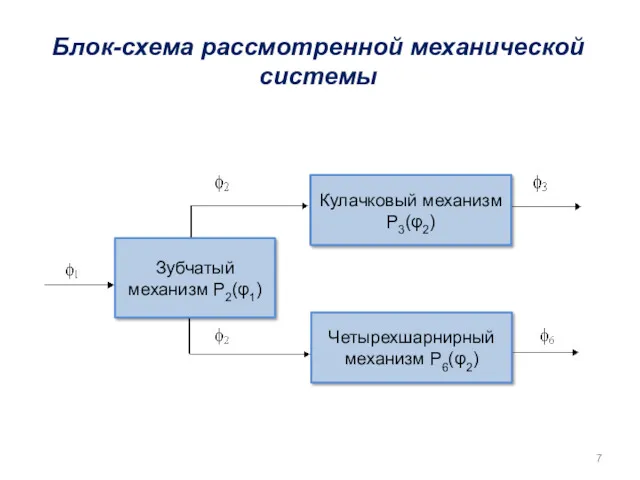
Блок-схема рассмотренной механической системы
Блок-схема рассмотренной механической системы
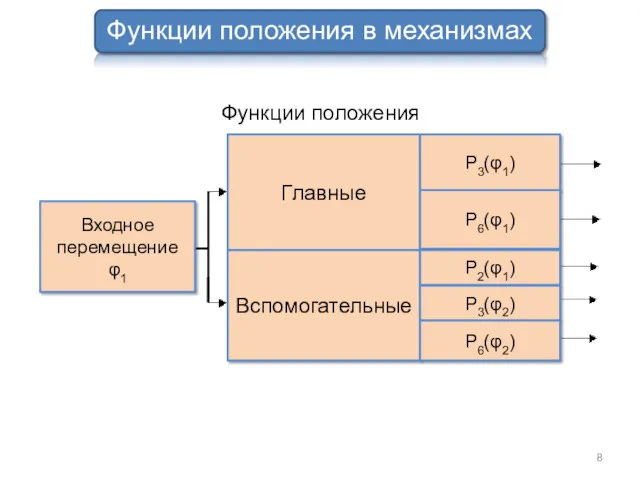
Функции положения в механизмах
Функции положения в механизмах
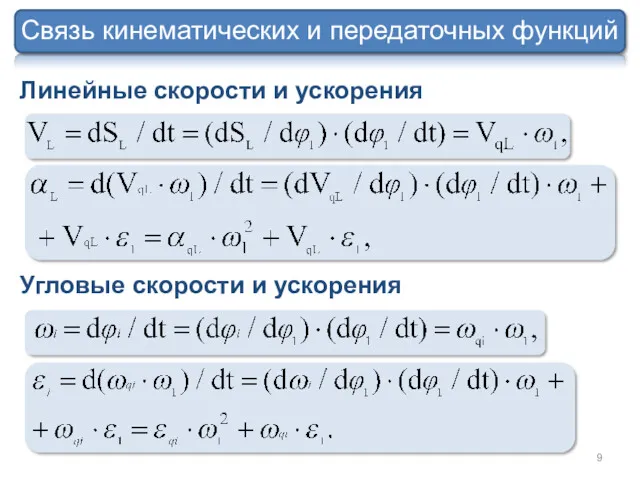
Линейные скорости и ускорения
Угловые скорости и ускорения
Связь кинематических и передаточных
Линейные скорости и ускорения
Угловые скорости и ускорения
Связь кинематических и передаточных
- кинематических диаграмм (графический),
- планов положений, скоростей и ускорений
- кинематических диаграмм (графический),
- планов положений, скоростей и ускорений
2 3 4 6 7
C
4
Графический метод (метод диаграмм)
1
2
3
5
6
7
8
9
10
11
12
A
ω2
φ2
5
8
12
10
C1
9
4
3
2
B
1 мм μl
2 3 4 6 7
C
4
Графический метод (метод диаграмм)
1
2
3
5
6
7
8
9
10
11
12
A
ω2
φ2
5
8
12
10
C1
9
4
3
2
B
1 мм μl
2 3 4 6 7
4
Графический метод (метод диаграмм)
SC
VC
aC
l мм
1 2
2 3 4 6 7
4
Графический метод (метод диаграмм)
SC
VC
aC
l мм
1 2
s2b
as2
s2
A
B
O1
O3
1
2
3
VBA
VBA
VB
VA
VB = VA + VBA
VA
VB
S2
a
b
AS2
S2B
=
PV
s2
Графо-аналитический метод (метод планов скоростей)
Метод планов
s2b
as2
s2
A
B
O1
O3
1
2
3
VBA
VBA
VB
VA
VB = VA + VBA
VA
VB
S2
a
b
AS2
S2B
=
PV
s2
Графо-аналитический метод (метод планов скоростей)
Метод планов
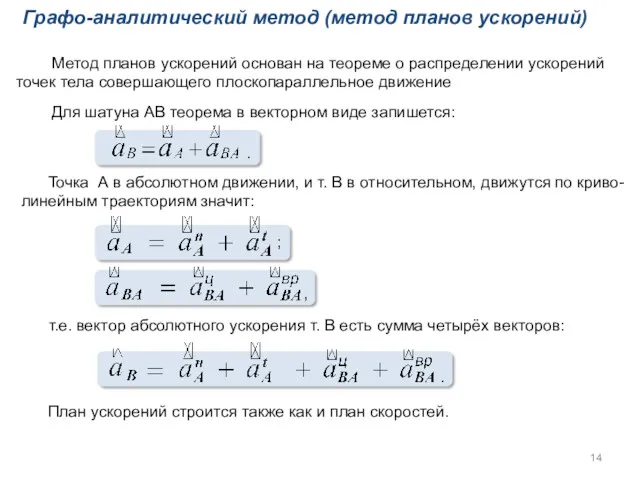
Графо-аналитический метод (метод планов ускорений)
Метод планов ускорений основан на теореме
Графо-аналитический метод (метод планов ускорений)
Метод планов ускорений основан на теореме
e
s1
f
c
C
d
B
b
p
1
4
E
2
5
F
G
D
3
6
S1
S2
S3
g
7
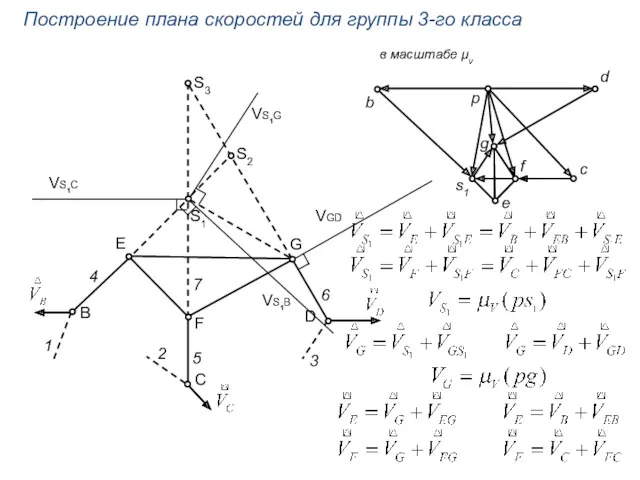
в масштабе μv
VS1B
VS1C
VS1G
VGD
Построение плана скоростей для группы 3-го класса
e
s1
f
c
C
d
B
b
p
1
4
E
2
5
F
G
D
3
6
S1
S2
S3
g
7
в масштабе μv
VS1B
VS1C
VS1G
VGD
Построение плана скоростей для группы 3-го класса
S1
s1
n2
e
n6
n3
F
d
b
C
B
1
4
E
2
5
G
D
3
6
S2
S3
7
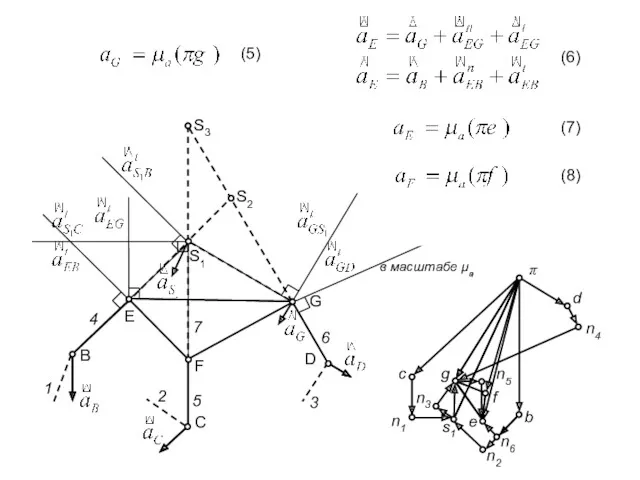
в масштабе μa
c
n1
g
f
n5
n4
π
(1)
(3)
(2.1)
(2.2)
(2.3)
(2.4)
(4)
(6)
(5)
(8)
(7)
S1
s1
n2
e
n6
n3
F
d
b
C
B
1
4
E
2
5
G
D
3
6
S2
S3
7
в масштабе μa
c
n1
g
f
n5
n4
π
(1)
(3)
(2.1)
(2.2)
(2.3)
(2.4)
(4)
(6)
(5)
(8)
(7)
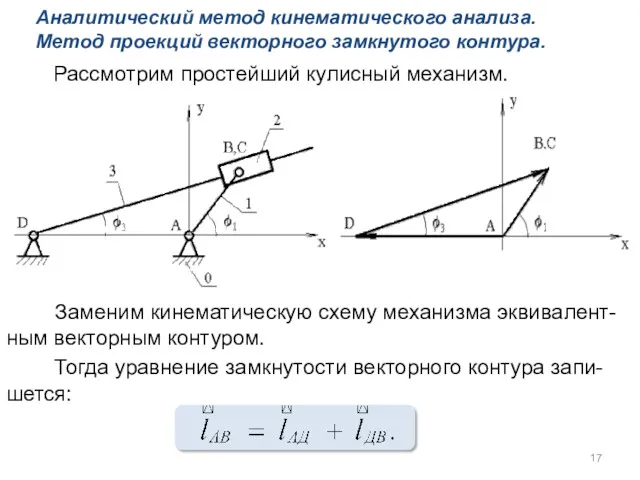
Рассмотрим простейший кулисный механизм.
Заменим кинематическую схему механизма эквивалент-ным векторным контуром.
Заменим кинематическую схему механизма эквивалент-ным векторным контуром.
Задача о положениях звеньев механизма
Проецируем векторный контур на оси координат и
Задача о положениях звеньев механизма
Проецируем векторный контур на оси координат и
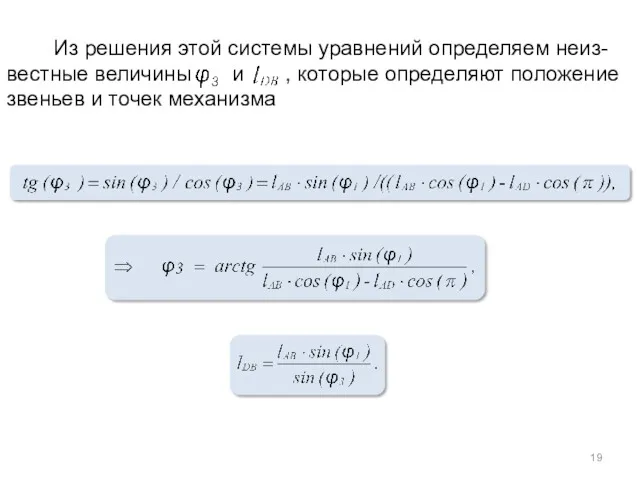
Из решения этой системы уравнений определяем неиз-вестные величины и , которые
Задача о первых кинематических передаточных функциях механизма
Продифференцируем уравнения проекций векторного
Задача о первых кинематических передаточных функциях механизма
Продифференцируем уравнения проекций векторного
Задача о вторых передаточных функциях механизма
Вторично продифференцируем уравнения проекций вектор-ного контура
Задача о вторых передаточных функциях механизма
Вторично продифференцируем уравнения проекций вектор-ного контура
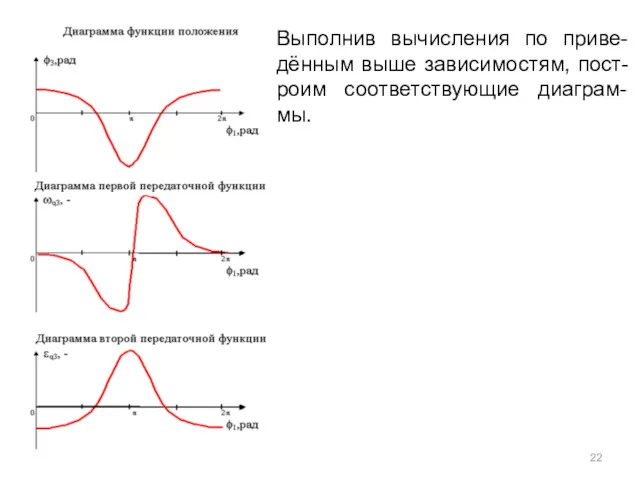
Выполнив вычисления по приве-дённым выше зависимостям, пост-роим соответствующие диаграм-мы.
Выполнив вычисления по приве-дённым выше зависимостям, пост-роим соответствующие диаграм-мы.
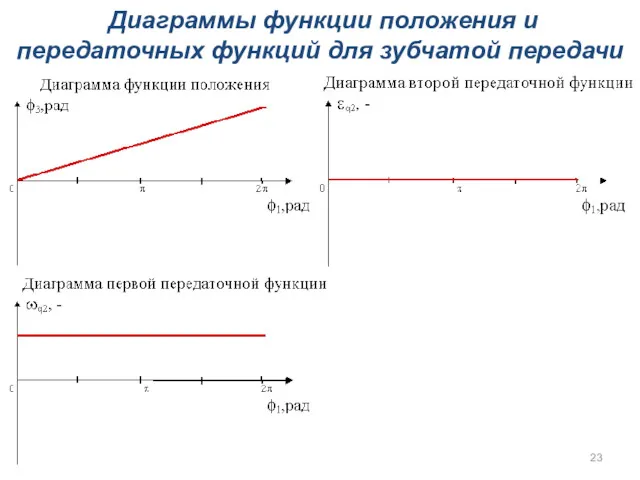
Диаграммы функции положения и передаточных функций для зубчатой передачи
Диаграммы функции положения и передаточных функций для зубчатой передачи
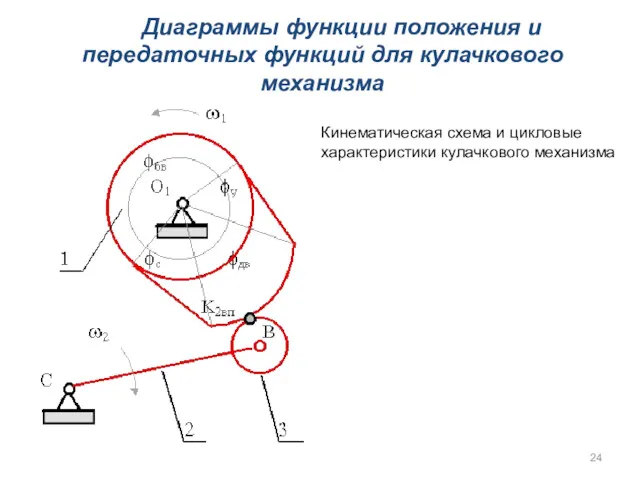
Диаграммы функции положения и передаточных функций для кулачкового механизма
Кинематическая схема
Диаграммы функции положения и передаточных функций для кулачкового механизма
Кинематическая схема
Экспериментальный метод кинематического исследования
При экспериментальном исследовании кинематики меха-низмов кинематические характеристики
Экспериментальный метод кинематического исследования
При экспериментальном исследовании кинематики меха-низмов кинематические характеристики
В последнее время для регистрации и обработки экспери-ментальных данных все
В последнее время для регистрации и обработки экспери-ментальных данных все
В этой экспериментальной установке:
для измерения перемещения выходного звена исполь-зуется потенциометрический датчик
для измерения перемещения выходного звена исполь-зуется потенциометрический датчик
для измерения ускорения выходного звена использу-ется тензометрический акселерометр. Он состоит из
для измерения ускорения выходного звена использу-ется тензометрический акселерометр. Он состоит из
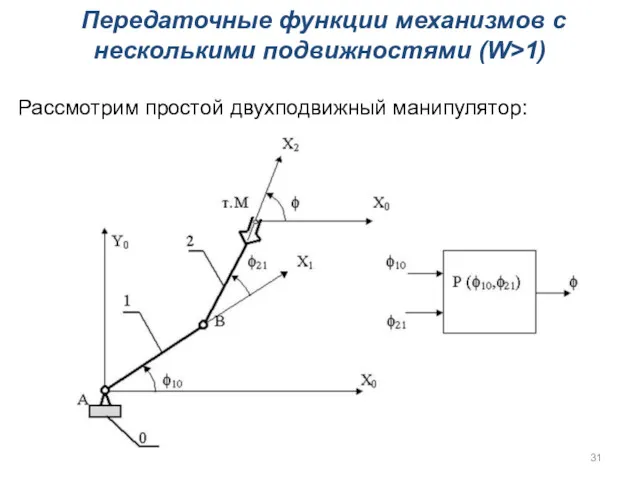
Передаточные функции механизмов с несколькими подвижностями (W>1)
Рассмотрим простой двухподвижный
Передаточные функции механизмов с несколькими подвижностями (W>1)
Рассмотрим простой двухподвижный
 Явление электромагнитной индукции. Магнитный поток. Закон электромагнитной индукции.
Явление электромагнитной индукции. Магнитный поток. Закон электромагнитной индукции. Теплопроводность. Основные положения теории теплопроводности. (Тема 4. Лекции 14,15)
Теплопроводность. Основные положения теории теплопроводности. (Тема 4. Лекции 14,15) Силы в природе. Понятие силы
Силы в природе. Понятие силы Кинетическая теория равновесного идеального газа. Термодинамика идеального газа. Лекция 2
Кинетическая теория равновесного идеального газа. Термодинамика идеального газа. Лекция 2 Функциональная магнитоэлектроника. УФЭ (5)
Функциональная магнитоэлектроника. УФЭ (5) Радиоактивность. Модели атомов. Опыт Резерфорда
Радиоактивность. Модели атомов. Опыт Резерфорда Швейная машина. 5 класс
Швейная машина. 5 класс Двигатели внутреннего сгорания
Двигатели внутреннего сгорания Малоугловое рассеяние нейтронов и рентгеновских лучей в неупорядоченных средах (SANS, USANS и SAXS)
Малоугловое рассеяние нейтронов и рентгеновских лучей в неупорядоченных средах (SANS, USANS и SAXS) Твердое состояние вещества
Твердое состояние вещества Плотность вещества
Плотность вещества Ремонт выхлопной системы Ваз-2170. (Часть 2)
Ремонт выхлопной системы Ваз-2170. (Часть 2) Моторы и пропеллеры
Моторы и пропеллеры Рост наноструктур и микроскопия. Методы выращивания наноструктур
Рост наноструктур и микроскопия. Методы выращивания наноструктур Простые механизмы
Простые механизмы Оливин. Физические и химические свойства
Оливин. Физические и химические свойства Равновесие тел. Решение задач
Равновесие тел. Решение задач Стартери. Прилади освітлення і сигналізації, контрольно-вимірювальні прилади
Стартери. Прилади освітлення і сигналізації, контрольно-вимірювальні прилади Рулевое управление. Устройство автомобиля
Рулевое управление. Устройство автомобиля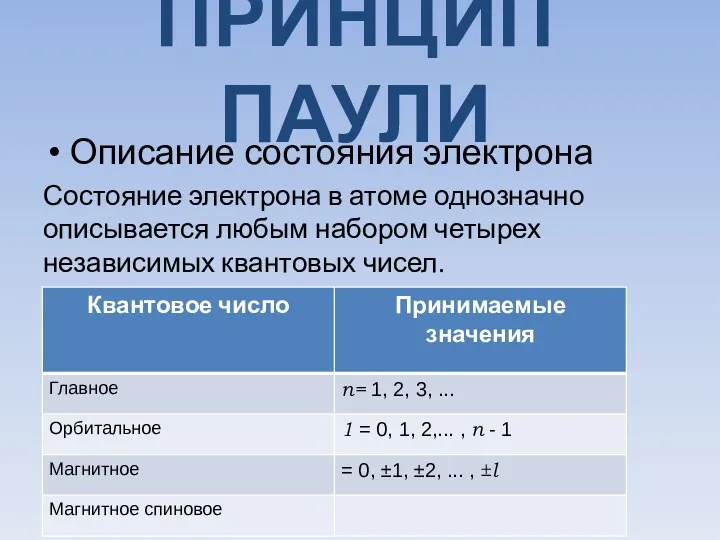 Принцип Паули
Принцип Паули Разработка урока по физике Электризация тел 8 класс. В соответствии с ФГОС.
Разработка урока по физике Электризация тел 8 класс. В соответствии с ФГОС.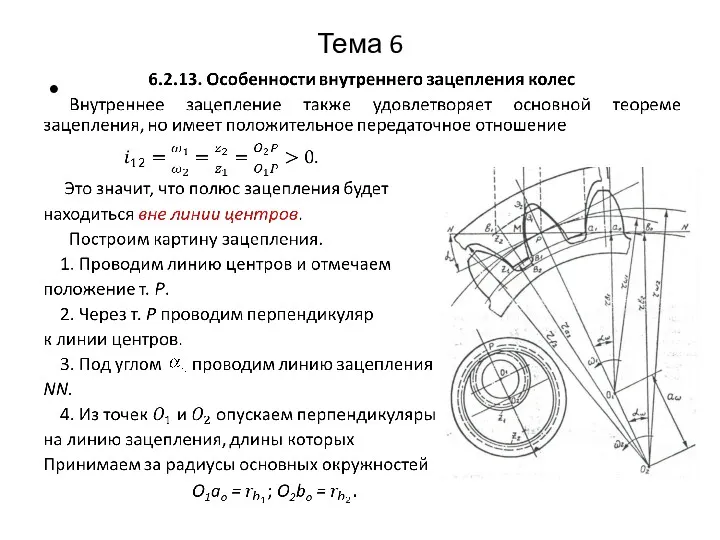 Особенности внутреннего зацепления колес
Особенности внутреннего зацепления колес Стенд 7Д01. Импульсные СО2 лазеры
Стенд 7Д01. Импульсные СО2 лазеры Явление электромагнитной индукции
Явление электромагнитной индукции IT-урок для 8 класса по теме Лампы накаливания
IT-урок для 8 класса по теме Лампы накаливания Солнечная энергия
Солнечная энергия презентация к открытому уроку по физике
презентация к открытому уроку по физике Зависимость силы тока от напряжения. Электрическое сопротивление
Зависимость силы тока от напряжения. Электрическое сопротивление