- Кинематика

Содержание
- 2. Общая схема кинематики
- 3. W = 0 – движение равномерное, W = const – равнопеременное движение, А) const > 0
- 4. V – модуль скорости точки. Направлен по касательной к траектории точки. Направлено в сторону вогнутости траектории.
- 5. 2.2.2 Скорости и ускорения материальной точки Если закон движения задан: в векторном виде: в координатном виде:
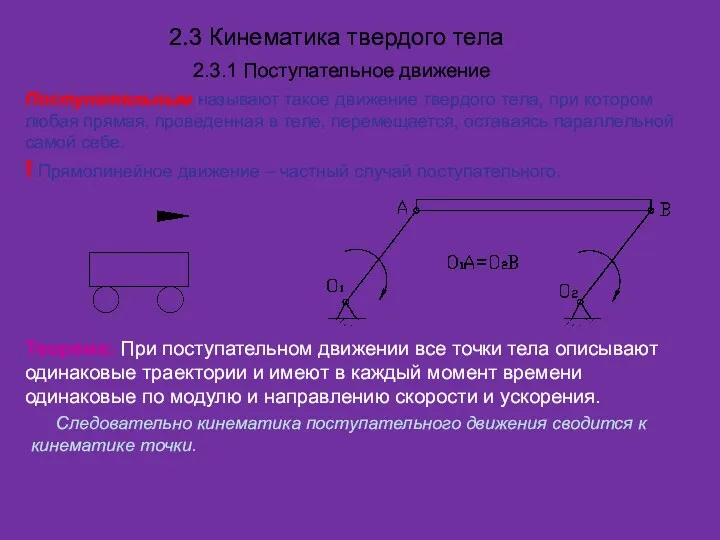
- 6. 2.3 Кинематика твердого тела 2.3.1 Поступательное движение Поступательным называют такое движение твердого тела, при котором любая
- 7. 2.3.2 Вращательное движение твердого тела Вращательным называется такое движение твердого тела, при котором какие-нибудь две точки,
- 8. Равномерное и равнопеременное вращение - вращение называют равномерным. Пусть при t = 0 - закон движения
- 9. 2.3.3 Скорости и ускорения точек вращающегося тела Точка М описывает окружность. – линейная или окружная скорость
- 10. 2.3.4 Плоскопараллельное движение твердого тела Плоскопараллельным или плоским движением твердого тела называется такое движение, при котором
- 11. Траектории точек тела Положение точки М на сечении S определяется: расстоянием ; углом . Координаты точки
- 12. Определение линейных скоростей точек звеньев механизма Построение плана скоростей начнём с ведущего звена О1А, которое вращается
- 13. Вектор абсолютной скорости совпадает с вектором относительной скорости . Скорость О2 равна нулю, так как этот
- 14. Схема механизма Величину рс находим из пропорции: Система уравнений для скорости точки D будет иметь следующий
- 15. Мгновенным центром скоростей (МЦС) называется точка сечения S тела, скорость которой в данный момент времени равна
- 16. Геометрическое место МЦВ на неподвижной плоскости называют неподвижной центроидой, а геометрическое место этих центров в плоскости,
- 17. Ускорения точек тела. При плоскопараллельном движении ускорение любой точки (так же как и скорость) складывается из
- 18. Для определения направления угловой скорости второго звена ω2 необходимо мысленно перенести вектор относительной скорости из плана
- 19. Масштабный коэффициент плана ускорений: Определим ускорение точки В. Схема механизма Т.к. точка В движется криволинейно, то
- 20. Для определения ускорения точки C воспользуемся свойством подобия: Система уравнений для ускорения точки D будет имеет
- 22. Скачать презентацию

Общая схема кинематики
Общая схема кинематики
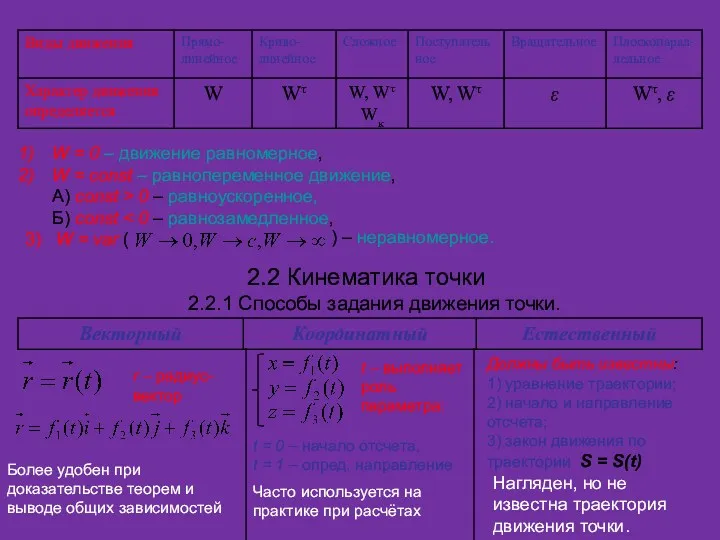
W = 0 – движение равномерное,
W = const – равнопеременное движение,
А)
W = 0 – движение равномерное,
W = const – равнопеременное движение,
А)
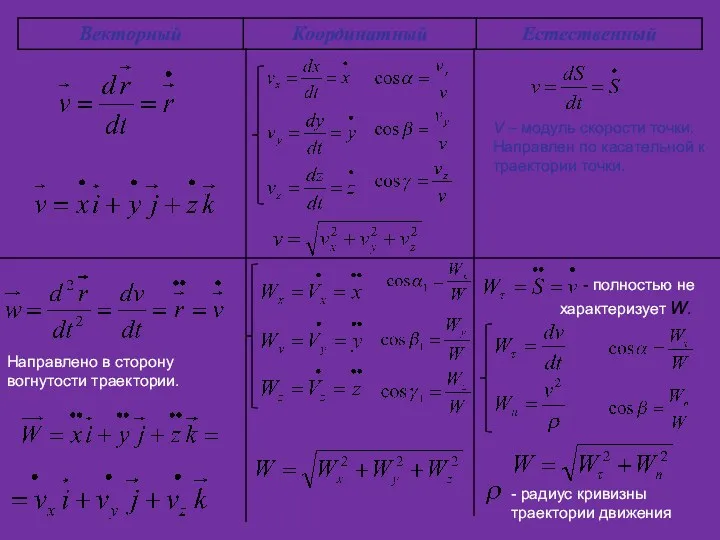
V – модуль скорости точки.
Направлен по касательной к траектории точки.
Направлено
V – модуль скорости точки.
Направлен по касательной к траектории точки.
Направлено
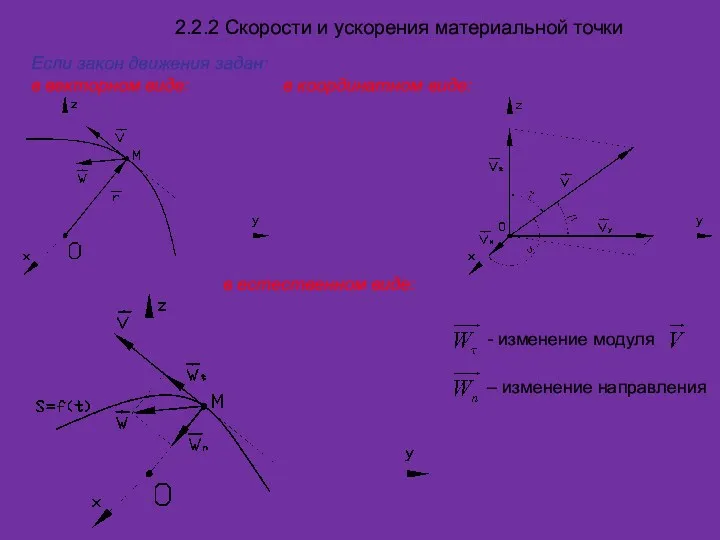
2.2.2 Скорости и ускорения материальной точки
Если закон движения задан:
в
2.2.2 Скорости и ускорения материальной точки
Если закон движения задан:
в
2.3 Кинематика твердого тела
2.3.1 Поступательное движение
Поступательным называют такое движение
2.3 Кинематика твердого тела
2.3.1 Поступательное движение
Поступательным называют такое движение
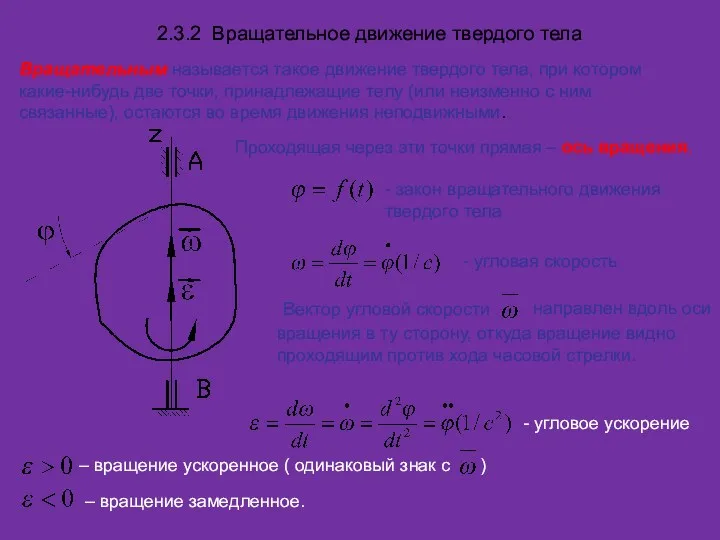
2.3.2 Вращательное движение твердого тела
Вращательным называется такое движение твердого тела,
2.3.2 Вращательное движение твердого тела
Вращательным называется такое движение твердого тела,
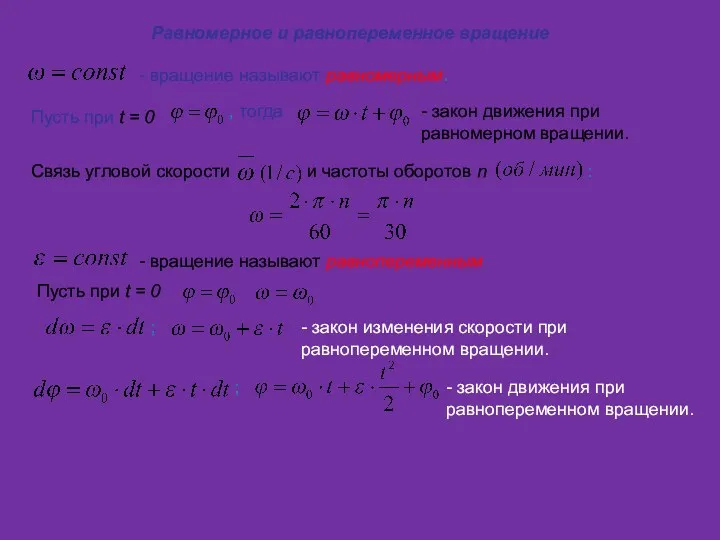
Равномерное и равнопеременное вращение
- вращение называют равномерным.
Пусть при t
Равномерное и равнопеременное вращение
- вращение называют равномерным.
Пусть при t
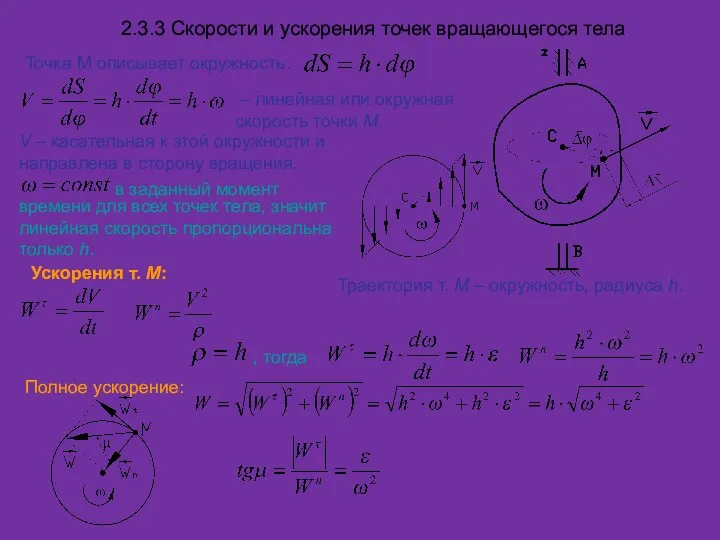
2.3.3 Скорости и ускорения точек вращающегося тела
Точка М описывает окружность.
2.3.3 Скорости и ускорения точек вращающегося тела
Точка М описывает окружность.
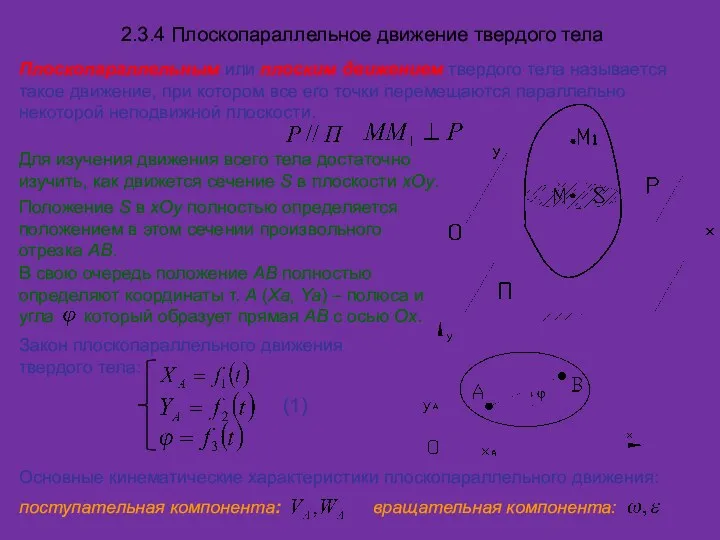
2.3.4 Плоскопараллельное движение твердого тела
Плоскопараллельным или плоским движением твердого тела
2.3.4 Плоскопараллельное движение твердого тела
Плоскопараллельным или плоским движением твердого тела
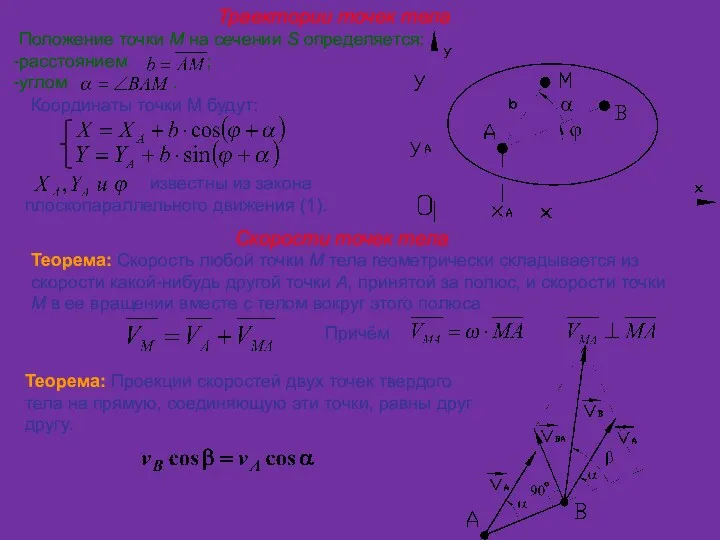
Траектории точек тела
Положение точки М на сечении S определяется:
расстоянием ;
углом
Траектории точек тела
Положение точки М на сечении S определяется:
расстоянием ;
углом
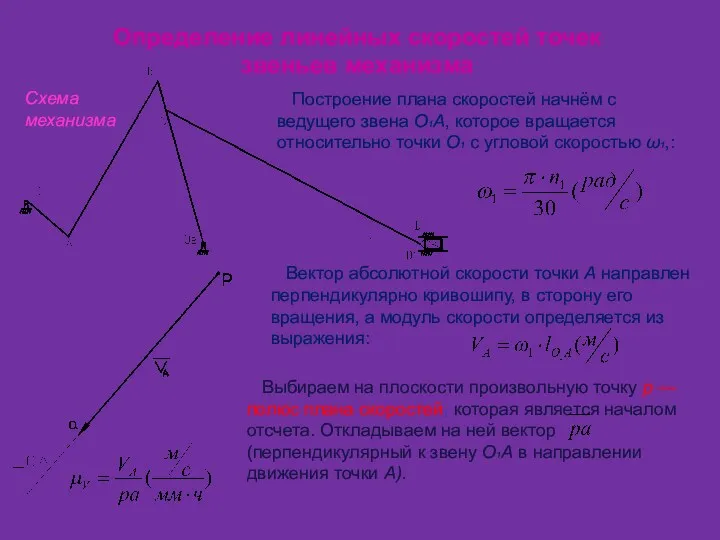
Определение линейных скоростей точек
звеньев механизма
Построение плана скоростей начнём с
Определение линейных скоростей точек
звеньев механизма
Построение плана скоростей начнём с
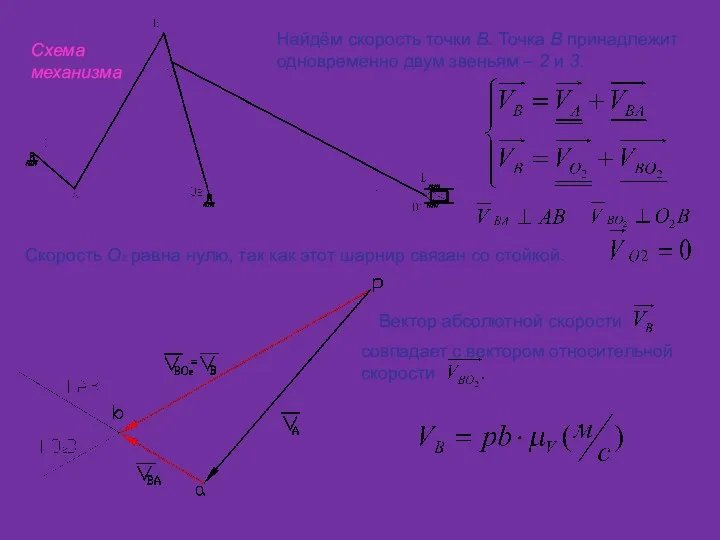
Вектор абсолютной скорости
совпадает с вектором относительной скорости .
Скорость О2 равна
Вектор абсолютной скорости
совпадает с вектором относительной скорости .
Скорость О2 равна
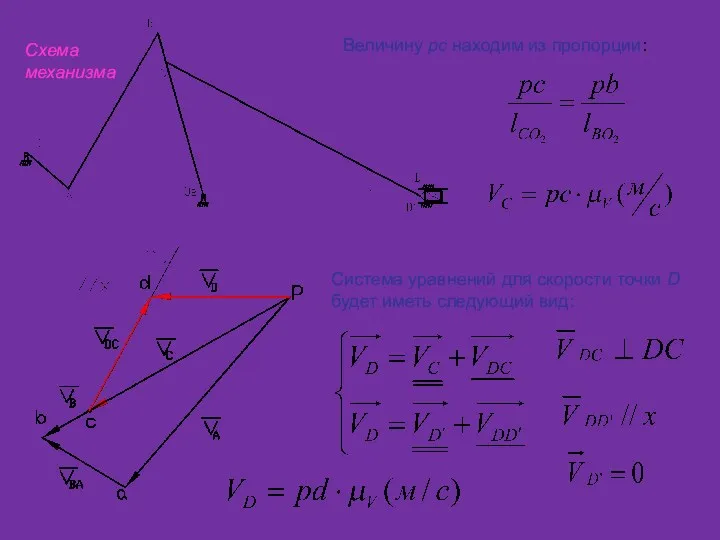
Схема механизма
Величину рс находим из пропорции:
Система уравнений для скорости точки
Схема механизма
Величину рс находим из пропорции:
Система уравнений для скорости точки
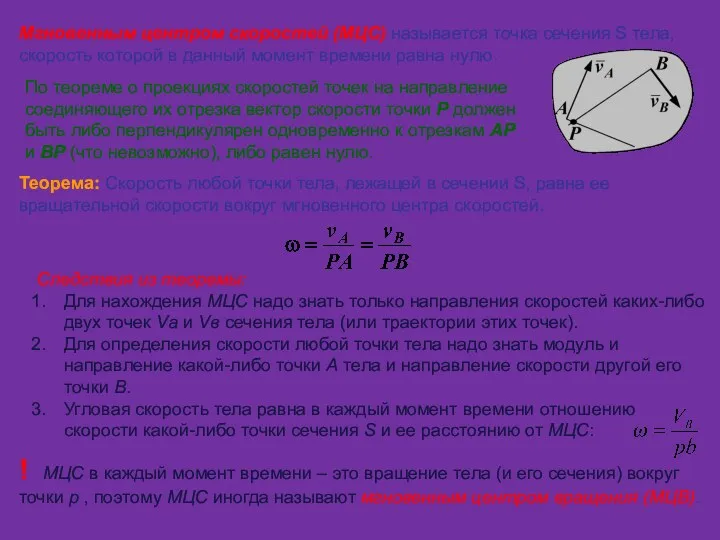
Мгновенным центром скоростей (МЦС) называется точка сечения S тела, скорость которой
Мгновенным центром скоростей (МЦС) называется точка сечения S тела, скорость которой
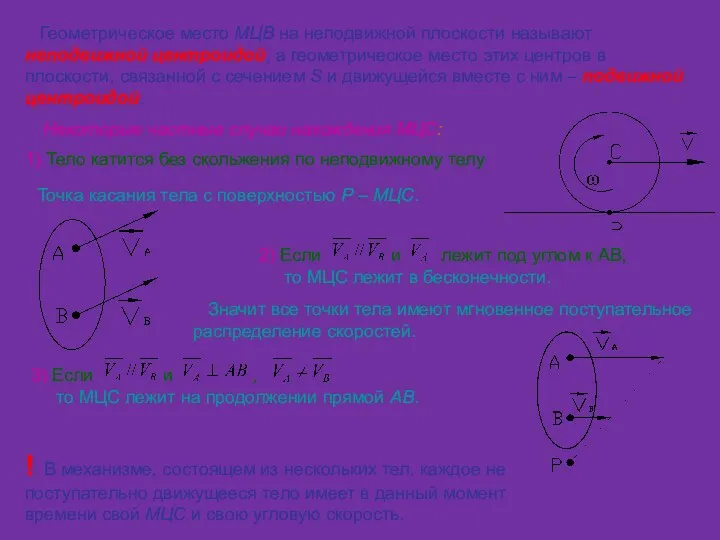
Геометрическое место МЦВ на неподвижной плоскости называют неподвижной центроидой, а
Геометрическое место МЦВ на неподвижной плоскости называют неподвижной центроидой, а
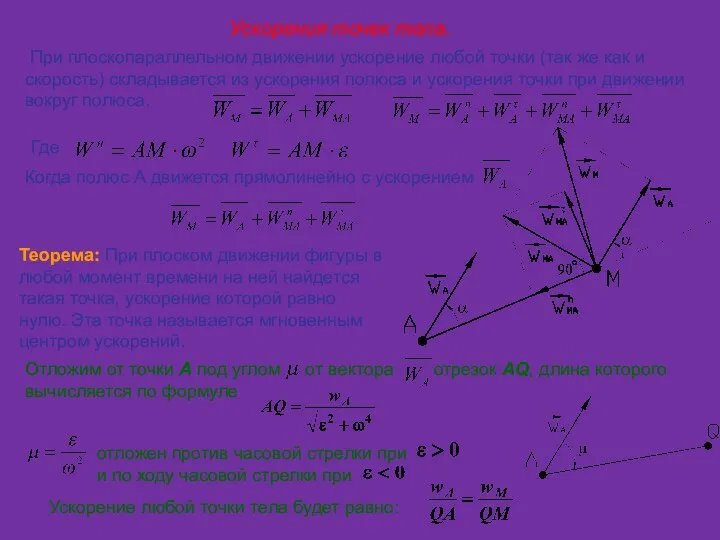
Ускорения точек тела.
При плоскопараллельном движении ускорение любой точки (так
Ускорения точек тела.
При плоскопараллельном движении ускорение любой точки (так
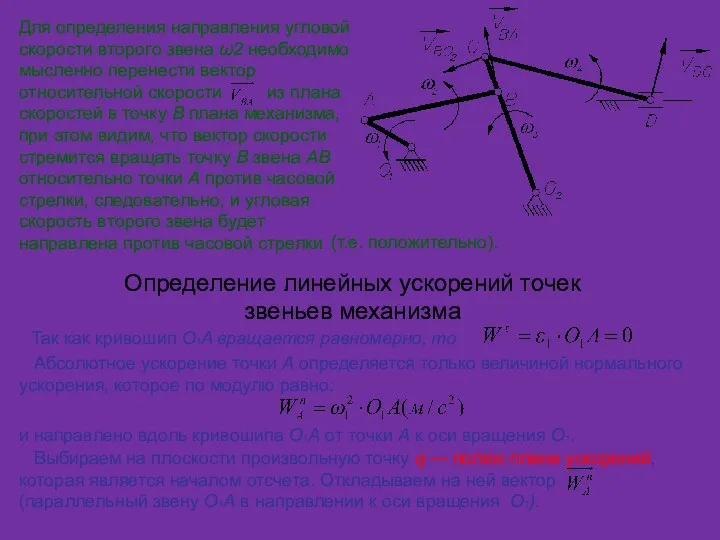
Для определения направления угловой скорости второго звена ω2 необходимо мысленно перенести
Для определения направления угловой скорости второго звена ω2 необходимо мысленно перенести
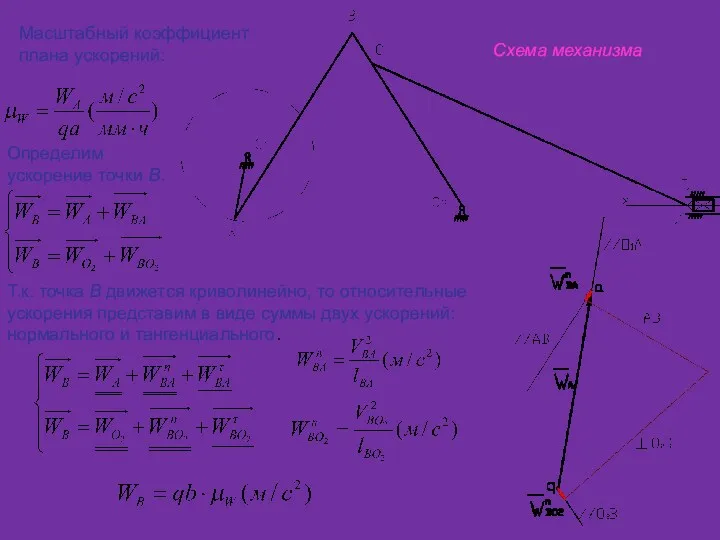
Масштабный коэффициент плана ускорений:
Определим ускорение точки В.
Схема механизма
Т.к. точка
Масштабный коэффициент плана ускорений:
Определим ускорение точки В.
Схема механизма
Т.к. точка
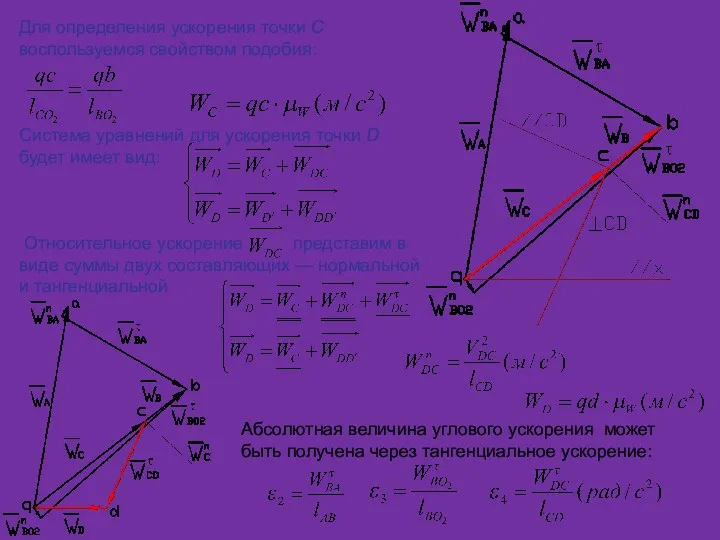
Для определения ускорения точки C воспользуемся свойством подобия:
Система уравнений для
Для определения ускорения точки C воспользуемся свойством подобия:
Система уравнений для
 Решение задач на применение законов Ньютона
Решение задач на применение законов Ньютона Основы акустики
Основы акустики Восстановление деталей. Гальваника
Восстановление деталей. Гальваника Физико-технические основы электроэнергетики
Физико-технические основы электроэнергетики Тест для 8 класса Электрический ток
Тест для 8 класса Электрический ток Оптика. Световые явления. (Урок 29 -30)
Оптика. Световые явления. (Урок 29 -30) Научно-исследовательская деятельность как фактор развития личности ученика и роста педагогического мастерства учителя.
Научно-исследовательская деятельность как фактор развития личности ученика и роста педагогического мастерства учителя. Линзы. Построение изображений в линзах
Линзы. Построение изображений в линзах Електричний струм у газах. Самостійний і несамостійний газові розряди. Плазма
Електричний струм у газах. Самостійний і несамостійний газові розряди. Плазма Открытый урок в 7 кл на тему Плавание тел
Открытый урок в 7 кл на тему Плавание тел Ручное изготовление кольца с использованием традиционных материалов
Ручное изготовление кольца с использованием традиционных материалов Ходовая часть автомобиля
Ходовая часть автомобиля Нанокерамикалық материалдардың артықшылықтары
Нанокерамикалық материалдардың артықшылықтары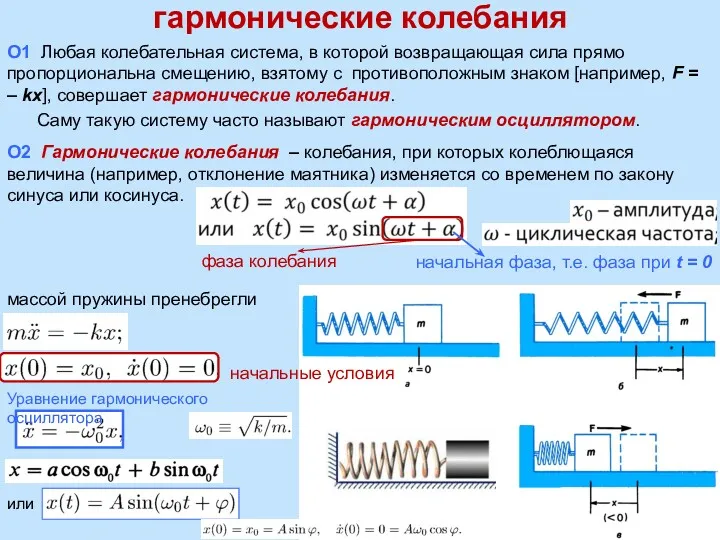 Гармонические колебания
Гармонические колебания Английский язык в механике
Английский язык в механике Рост наноструктур и микроскопия. Методы выращивания наноструктур
Рост наноструктур и микроскопия. Методы выращивания наноструктур Механические свойства материалов. Диаграммы растяжения и сжатия. (Лекция 4)
Механические свойства материалов. Диаграммы растяжения и сжатия. (Лекция 4) Работа тока и мощность электрического тока
Работа тока и мощность электрического тока Условия плавания тел в жидкости
Условия плавания тел в жидкости Закон Ома
Закон Ома Сила упругости. Закон Гука
Сила упругости. Закон Гука Электр тогы. Электр тізбегі
Электр тогы. Электр тізбегі Трение. Центр тяжести
Трение. Центр тяжести Экспериментальные методы исследования частиц. Ядерная физика. 9 класс
Экспериментальные методы исследования частиц. Ядерная физика. 9 класс Our knowledge in the field of fundamental physics
Our knowledge in the field of fundamental physics Обслуживание топливной аппаратуры грузовых автомобилей
Обслуживание топливной аппаратуры грузовых автомобилей Обприскувачі. Лабораторна робота
Обприскувачі. Лабораторна робота Механические колебания
Механические колебания