- Кинематика

Содержание
- 2. 2. Кинематика точки (продолжение). При е с т е с т в е н н о
- 3. 2. Кинематика точки (продолжение). М г н о в е н н а я с к
- 4. 2. Кинематика точки (продолжение). 2.3. У с к о р е н и е точки –
- 5. 2. Кинематика точки (продолжение). Определение к а с а т е л ь н о г
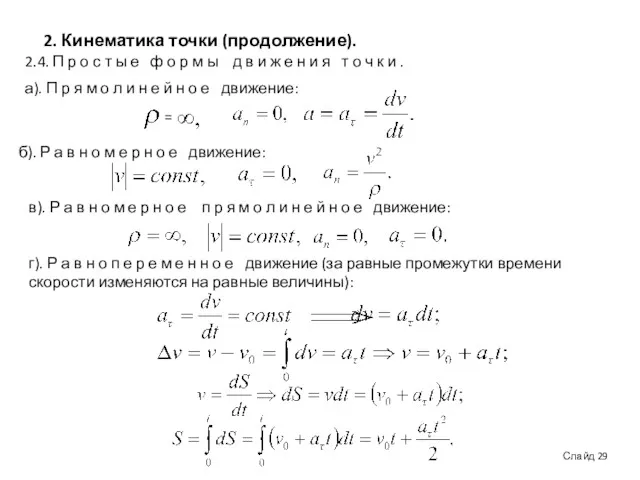
- 6. 2. Кинематика точки (продолжение). 2.4. П р о с т ы е ф о р м
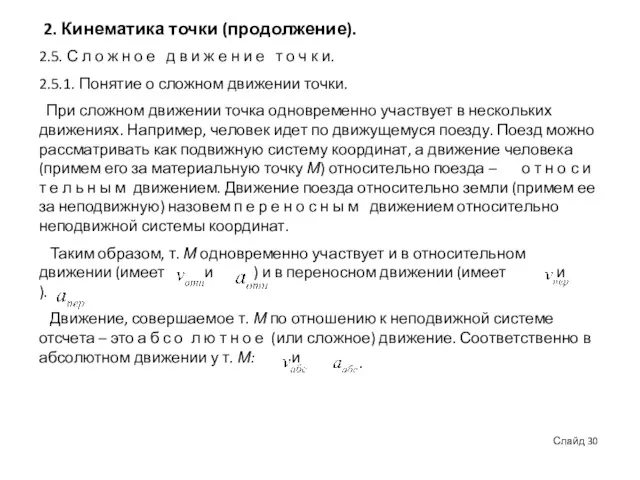
- 7. 2. Кинематика точки (продолжение). 2.5. С л о ж н о е д в и ж
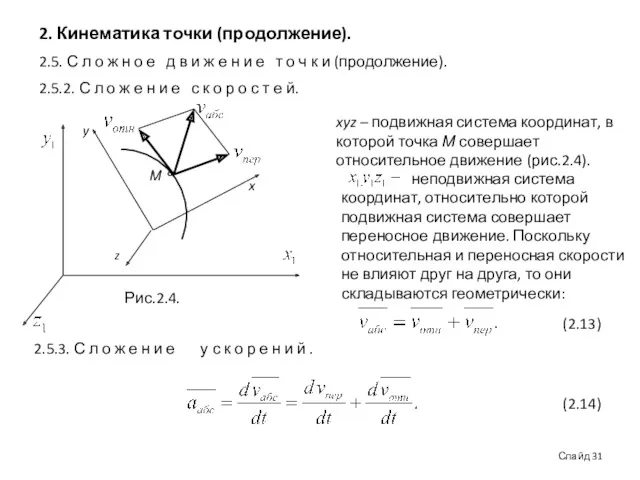
- 8. 2. Кинематика точки (продолжение). 2.5. С л о ж н о е д в и ж
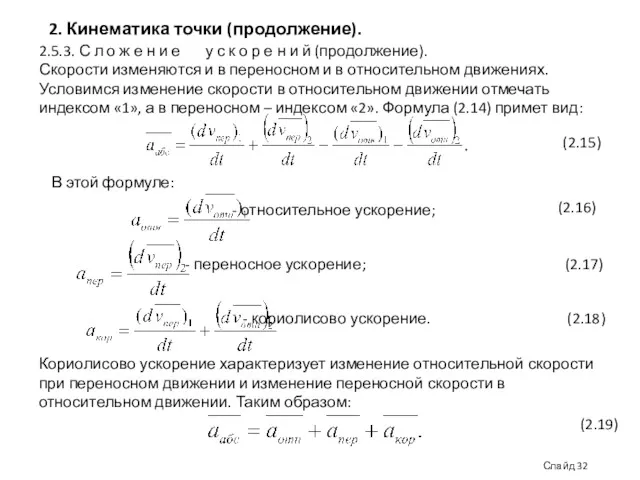
- 9. 2. Кинематика точки (продолжение). 2.5.3. С л о ж е н и е у с к
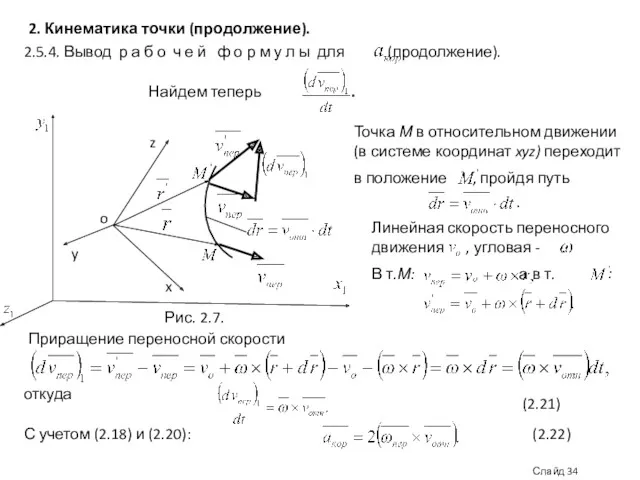
- 10. 2. Кинематика точки (продолжение). 2.5.4. Вывод р а б о ч е й ф о р
- 11. 2. Кинематика точки (продолжение). 2.5.4. Вывод р а б о ч е й ф о р
- 12. 2. Кинематика точки (завершение). Таким образом, получена рабочая формула (2.22) для расчета кориолисова ускорения. Если =0,
- 13. 3. Кинематика твердого тела (продолжение) 3.1.2. Вращение твердого тела вокруг неподвижной оси. y z x Рис.2.8.
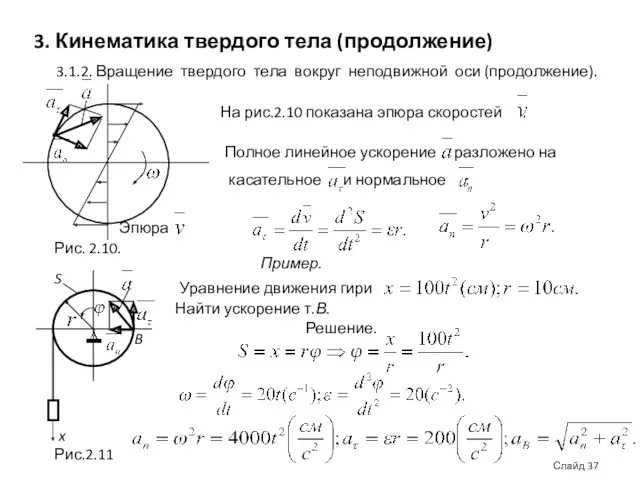
- 14. 3. Кинематика твердого тела (продолжение) 3.1.2. Вращение твердого тела вокруг неподвижной оси (продолжение). Рис. 2.10. Эпюра
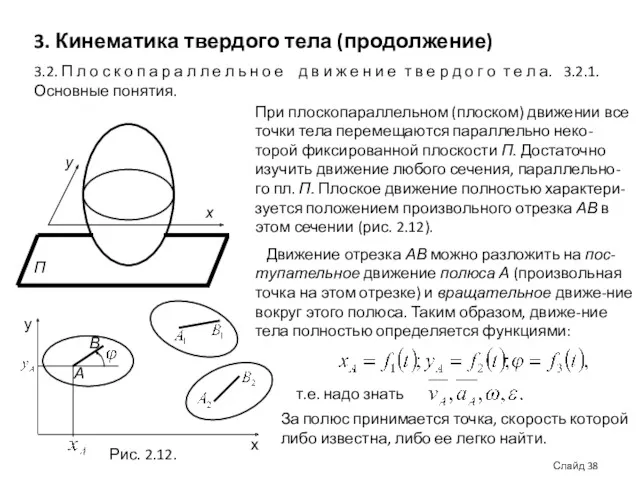
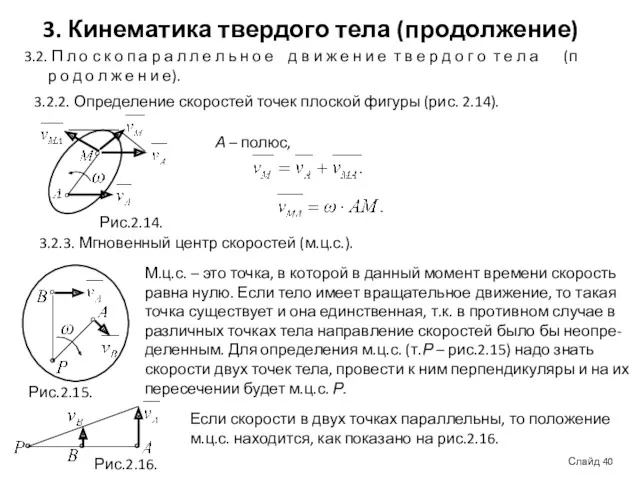
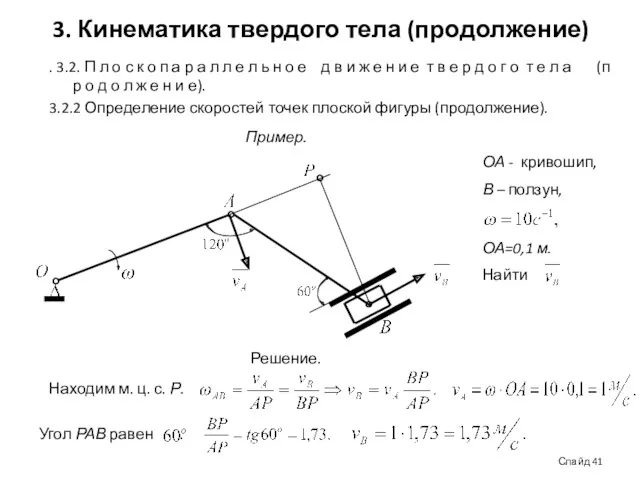
- 15. 3. Кинематика твердого тела (продолжение) 3.2. П л о с к о п а р а
- 16. 3. Кинематика твердого тела (продолжение) 3.2. П л о с к о п а р а
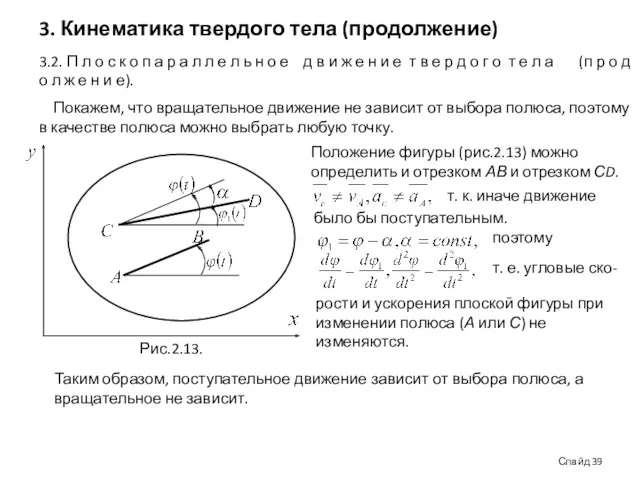
- 17. 3. Кинематика твердого тела (продолжение) 3.2. П л о с к о п а р а
- 18. 3. Кинематика твердого тела (продолжение) . 3.2. П л о с к о п а р
- 19. 3. Кинематика твердого тела (продолжение) 3.2. П л о с к о п а р а
- 20. 3. Кинематика твердого тела (продолжение) 3.2.3 Определение ускорений точек плоской фигуры (продолжение). Пример о о о
- 22. Скачать презентацию
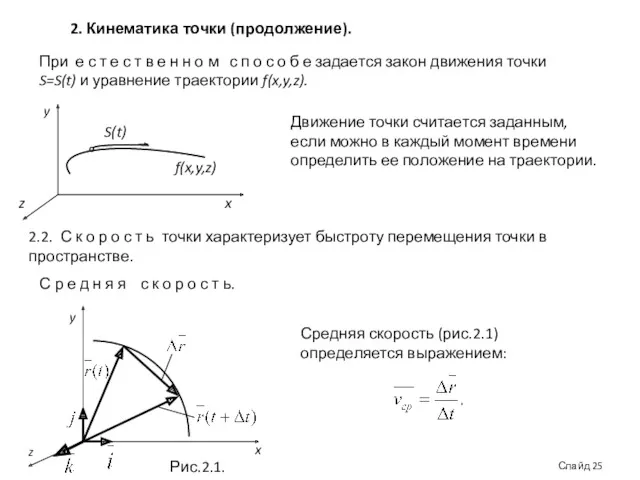
2. Кинематика точки (продолжение).
При е с т е с т в е н
2. Кинематика точки (продолжение).
При е с т е с т в е н
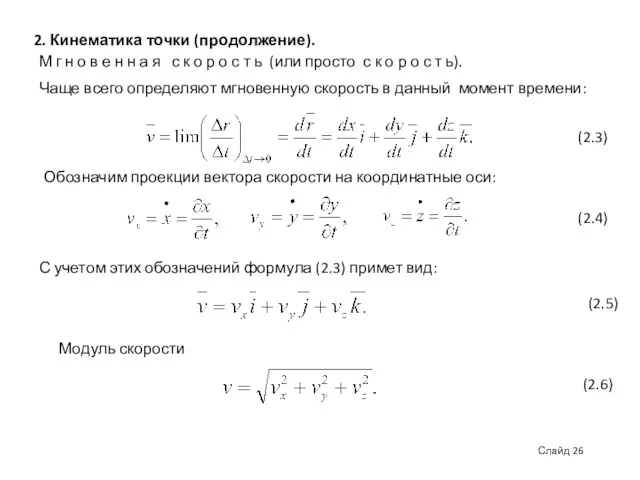
2. Кинематика точки (продолжение).
М г н о в е н н а я
2. Кинематика точки (продолжение).
М г н о в е н н а я
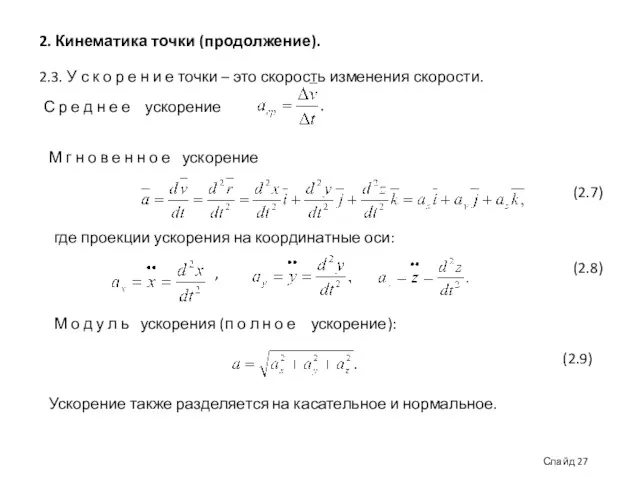
2. Кинематика точки (продолжение).
2.3. У с к о р е н и е
2. Кинематика точки (продолжение).
2.3. У с к о р е н и е
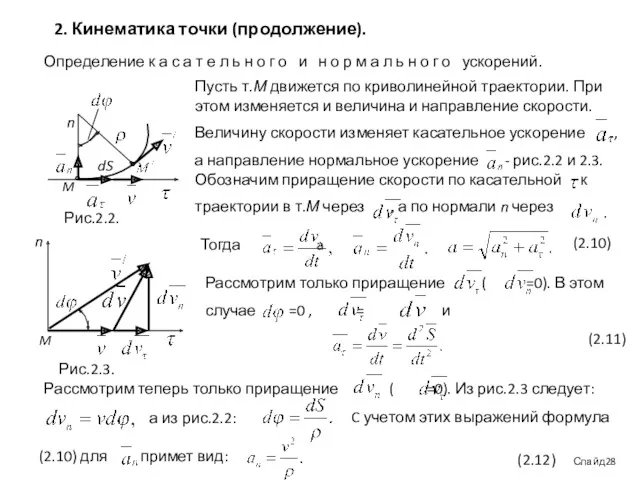
2. Кинематика точки (продолжение).
Определение к а с а т е л ь н
2. Кинематика точки (продолжение).
Определение к а с а т е л ь н
2. Кинематика точки (продолжение).
2.4. П р о с т ы е ф о
2. Кинематика точки (продолжение).
2.4. П р о с т ы е ф о
2. Кинематика точки (продолжение).
2.5. С л о ж н о е д в
2. Кинематика точки (продолжение).
2.5. С л о ж н о е д в
2. Кинематика точки (продолжение).
2.5. С л о ж н о е д в
2. Кинематика точки (продолжение).
2.5. С л о ж н о е д в
2. Кинематика точки (продолжение).
2.5.3. С л о ж е н и е у
2. Кинематика точки (продолжение).
2.5.3. С л о ж е н и е у
2. Кинематика точки (продолжение).
2.5.4. Вывод р а б о ч е й ф
2. Кинематика точки (продолжение).
2.5.4. Вывод р а б о ч е й ф
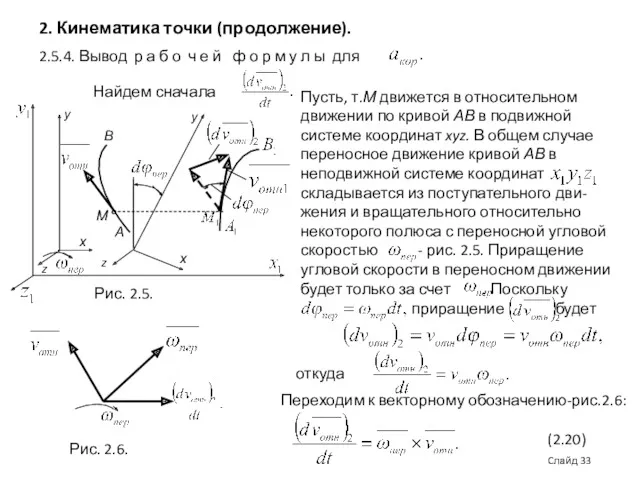
2. Кинематика точки (продолжение).
2.5.4. Вывод р а б о ч е й ф
2. Кинематика точки (продолжение).
2.5.4. Вывод р а б о ч е й ф
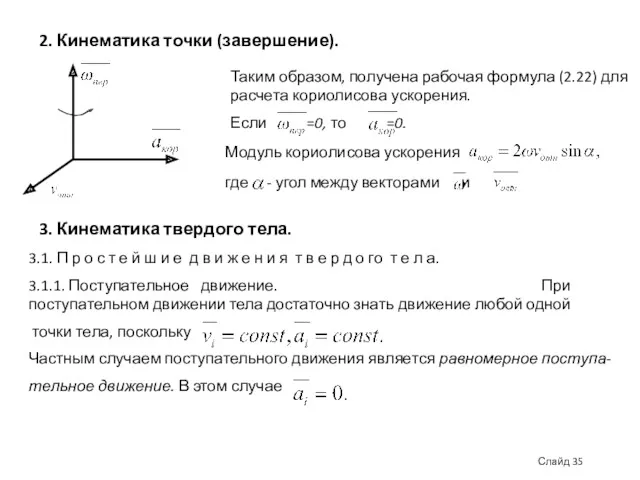
2. Кинематика точки (завершение).
Таким образом, получена рабочая формула (2.22) для расчета кориолисова ускорения.
Если
2. Кинематика точки (завершение).
Таким образом, получена рабочая формула (2.22) для расчета кориолисова ускорения.
Если
3. Кинематика твердого тела (продолжение)
3.1.2. Вращение твердого тела вокруг неподвижной оси.
y
z
x
Рис.2.8.
r
Рис.2.9.
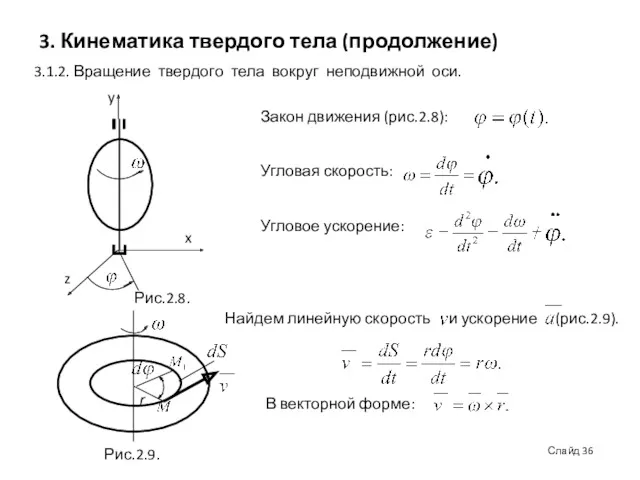
Закон движения (рис.2.8):
Угловая
3. Кинематика твердого тела (продолжение)
3.1.2. Вращение твердого тела вокруг неподвижной оси.
y
z
x
Рис.2.8.
r
Рис.2.9.
Закон движения (рис.2.8):
Угловая
3. Кинематика твердого тела (продолжение)
3.1.2. Вращение твердого тела вокруг неподвижной оси (продолжение).
Рис. 2.10.
Эпюра
На
3. Кинематика твердого тела (продолжение)
3.1.2. Вращение твердого тела вокруг неподвижной оси (продолжение).
Рис. 2.10.
Эпюра
На
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
. 3.2. П л о с к о п
3. Кинематика твердого тела (продолжение)
. 3.2. П л о с к о п
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
3. Кинематика твердого тела (продолжение)
3.2. П л о с к о п а
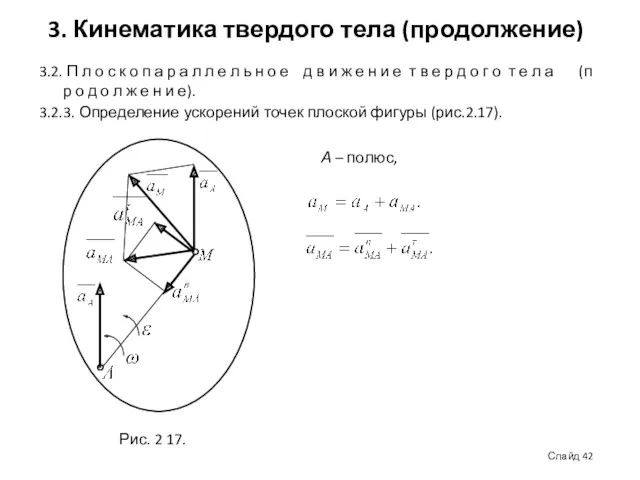
3. Кинематика твердого тела (продолжение)
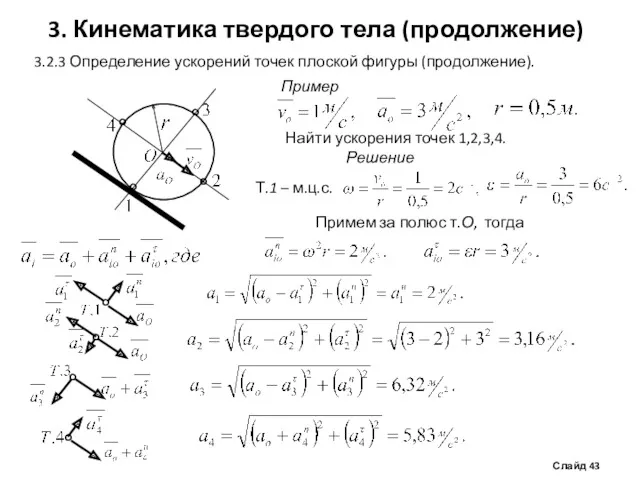
3.2.3 Определение ускорений точек плоской фигуры (продолжение).
Пример
о
о
о
о
Найти ускорения точек
3. Кинематика твердого тела (продолжение)
3.2.3 Определение ускорений точек плоской фигуры (продолжение).
Пример
о
о
о
о
Найти ускорения точек
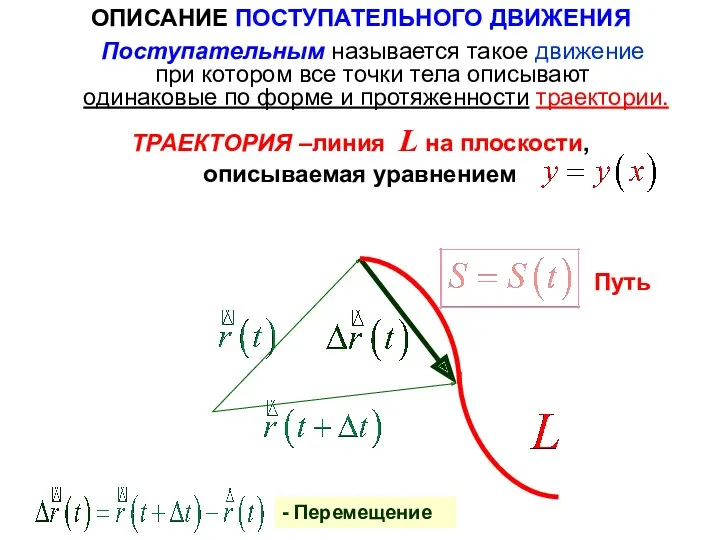 Описание поступательного движения
Описание поступательного движения Презентация к уроку
Презентация к уроку Применения технологии развивающего обучения в 5 классе
Применения технологии развивающего обучения в 5 классе Твердые диэлектрики, применяемые в ТВН. (Лекция 7)
Твердые диэлектрики, применяемые в ТВН. (Лекция 7) Предыстория радиотехники. Лекция 1
Предыстория радиотехники. Лекция 1 Закон Кулона. Напряженность электростатического поля
Закон Кулона. Напряженность электростатического поля Первое и второе начало термодинамики
Первое и второе начало термодинамики Тормозные механизмы легковых и грузовых автомобилей и автобусов. Тема 4.11
Тормозные механизмы легковых и грузовых автомобилей и автобусов. Тема 4.11 Физические и химические свойства воды
Физические и химические свойства воды Плазма в атмосфере
Плазма в атмосфере Презентация к уроку физики в 10 классе Закон всемирного тяготения
Презентация к уроку физики в 10 классе Закон всемирного тяготения Влияние мобильного телефона на здоровье школьника
Влияние мобильного телефона на здоровье школьника Исследовательская работа Почему корабли не тонут?
Исследовательская работа Почему корабли не тонут?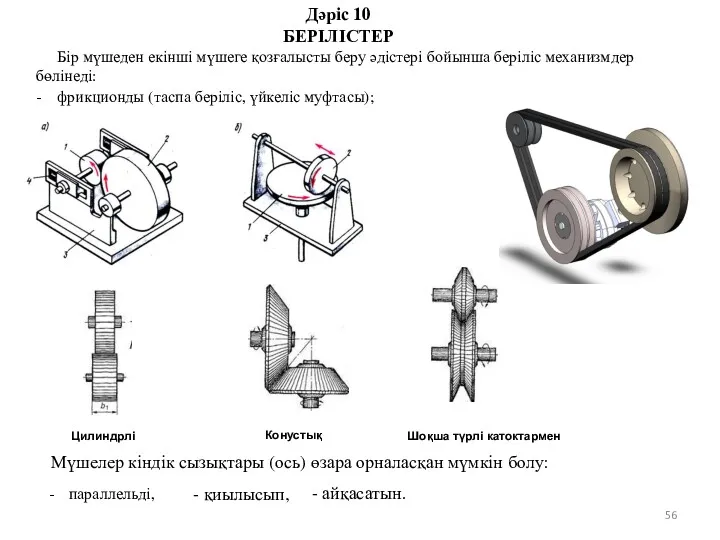 Берілістер
Берілістер Молекулярно-кинетическая теория строения вещества (МКТ)
Молекулярно-кинетическая теория строения вещества (МКТ) Свойства жидкостей. Поверхностное натяжение
Свойства жидкостей. Поверхностное натяжение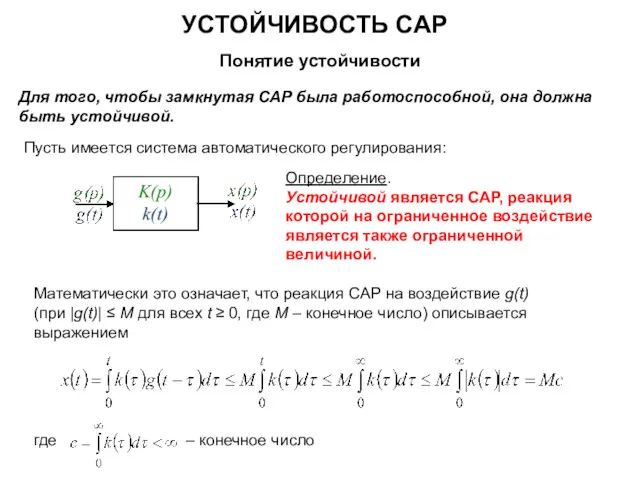 Устойчивость системы автоматического регулирования. (Тема 7)
Устойчивость системы автоматического регулирования. (Тема 7) Строение атома. Ядерные силы. Тест по теме Квантовые постулаты Бора
Строение атома. Ядерные силы. Тест по теме Квантовые постулаты Бора Дисперсия и интерференция света
Дисперсия и интерференция света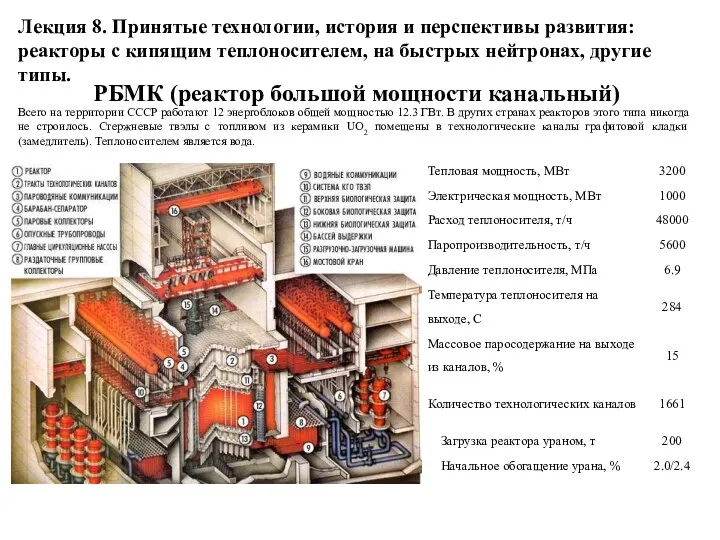 РБМК (реактор большой мощности канальный). Лекция 8
РБМК (реактор большой мощности канальный). Лекция 8 Детали машин и основы конструирования. Смазка, уплотнения, корпусные детали, двигатели. (Лекция 16)
Детали машин и основы конструирования. Смазка, уплотнения, корпусные детали, двигатели. (Лекция 16) Топологические изоляторы и смежные вопросы
Топологические изоляторы и смежные вопросы Субмикронная литография
Субмикронная литография Батарейка. Гальванический элемент.
Батарейка. Гальванический элемент. Термометры и их виды
Термометры и их виды Распространение радиоволн. Радиолокация
Распространение радиоволн. Радиолокация Кавитация в потоке движущейся через насос жидкости. Законы пропорциональности. (Лекция 3)
Кавитация в потоке движущейся через насос жидкости. Законы пропорциональности. (Лекция 3) Спектр және спектрлік анализ
Спектр және спектрлік анализ