- Кинематика. Сложное движение точки. Сложное движение твердого тела

Содержание
- 2. Содержание Лекция 5. Сложное движение точки. Теорема о сложении скоростей точки при сложном движении. Теорема о
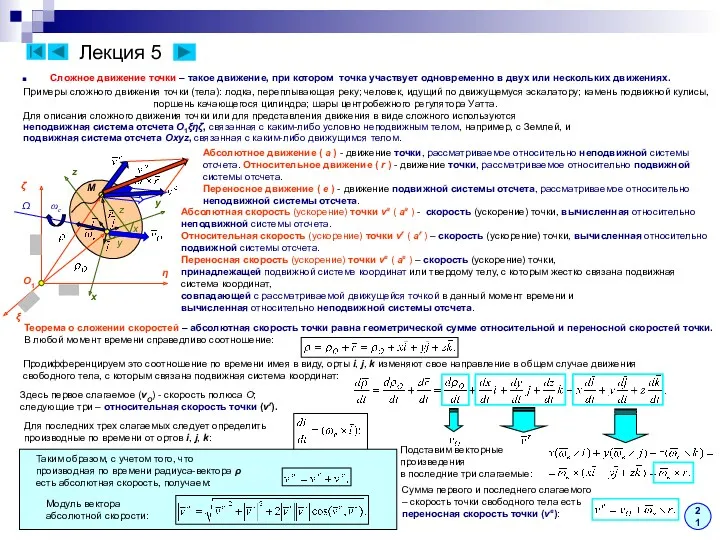
- 3. Лекция 5 Сложное движение точки – такое движение, при котором точка участвует одновременно в двух или
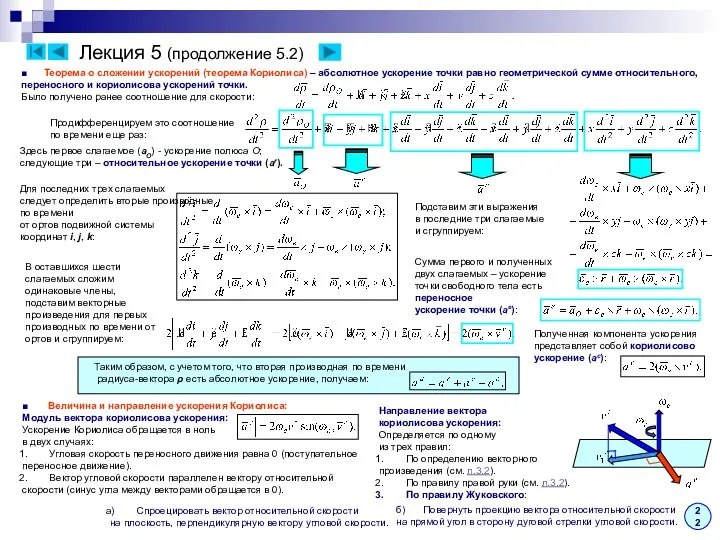
- 4. Лекция 5 (продолжение 5.2) ■ Теорема о сложении ускорений (теорема Кориолиса) – абсолютное ускорение точки равно
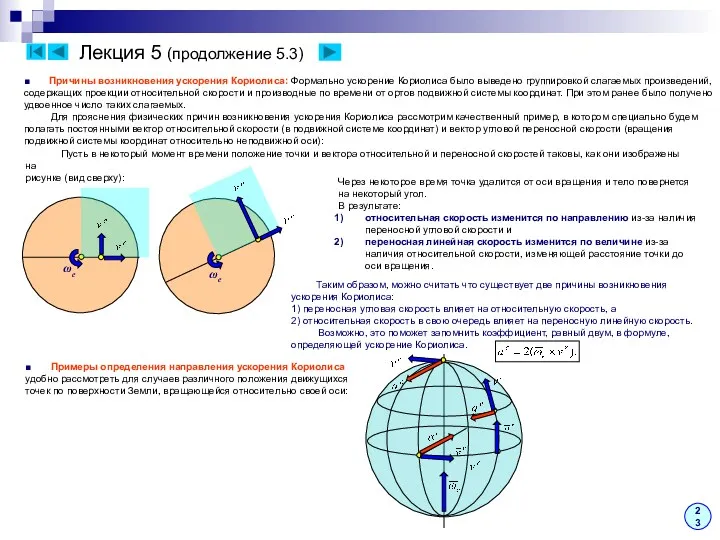
- 5. Лекция 5 (продолжение 5.3) ■ Причины возникновения ускорения Кориолиса: Формально ускорение Кориолиса было выведено группировкой слагаемых
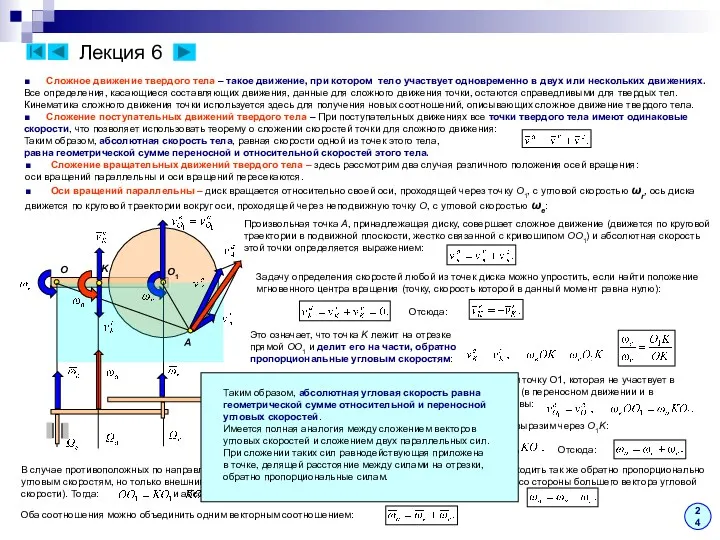
- 6. Лекция 6 ■ Сложное движение твердого тела – такое движение, при котором тело участвует одновременно в
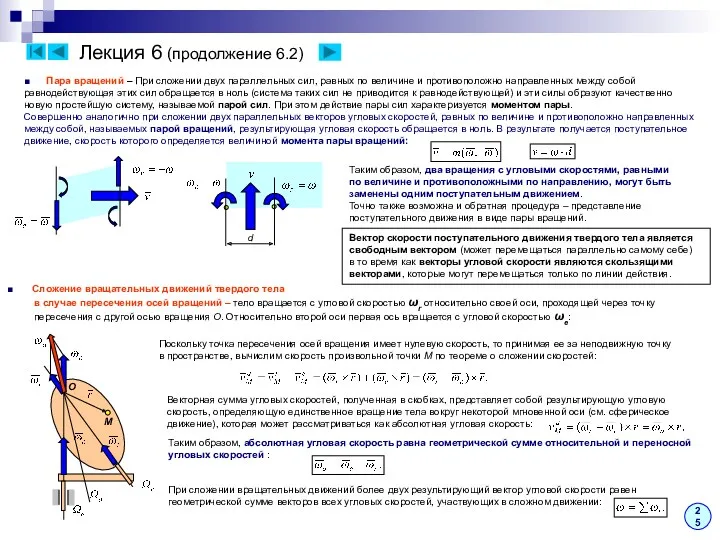
- 7. Лекция 6 (продолжение 6.2) ■ Пара вращений – При сложении двух параллельных сил, равных по величине
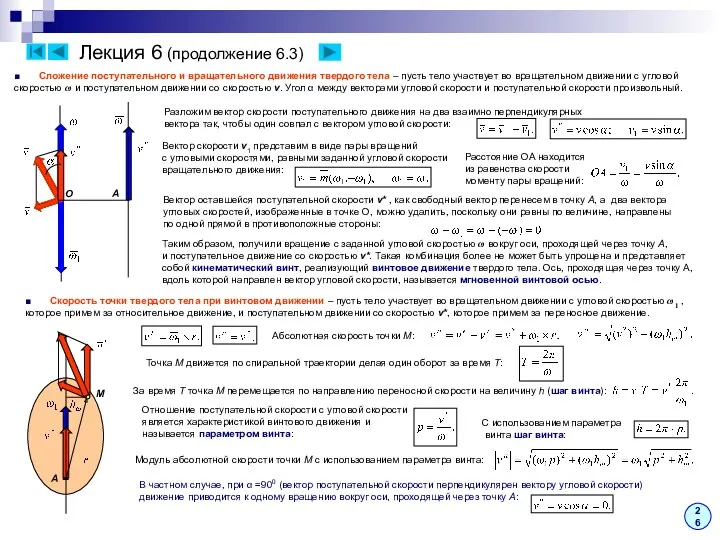
- 8. Лекция 6 (продолжение 6.3) ■ Сложение поступательного и вращательного движения твердого тела – пусть тело участвует
- 10. Скачать презентацию
Содержание
Лекция 5. Сложное движение точки. Теорема о сложении скоростей точки при
Содержание
Лекция 5. Сложное движение точки. Теорема о сложении скоростей точки при
Лекция 5
Сложное движение точки – такое движение, при котором точка участвует
Лекция 5
Сложное движение точки – такое движение, при котором точка участвует
Лекция 5 (продолжение 5.2)
■ Теорема о сложении ускорений (теорема Кориолиса) –
Лекция 5 (продолжение 5.2)
■ Теорема о сложении ускорений (теорема Кориолиса) –
Лекция 5 (продолжение 5.3)
■ Причины возникновения ускорения Кориолиса: Формально ускорение Кориолиса
Лекция 5 (продолжение 5.3)
■ Причины возникновения ускорения Кориолиса: Формально ускорение Кориолиса
Лекция 6
■ Сложное движение твердого тела – такое движение, при котором
Лекция 6
■ Сложное движение твердого тела – такое движение, при котором
Лекция 6 (продолжение 6.2)
■ Пара вращений – При сложении двух параллельных
Лекция 6 (продолжение 6.2)
■ Пара вращений – При сложении двух параллельных
Лекция 6 (продолжение 6.3)
■ Сложение поступательного и вращательного движения твердого тела
Лекция 6 (продолжение 6.3)
■ Сложение поступательного и вращательного движения твердого тела
 Основы электродинамики
Основы электродинамики Электрическая лампа накаливания 9 класс
Электрическая лампа накаливания 9 класс Оптичні прилади та їх застосування
Оптичні прилади та їх застосування Измерение фазового сдвига. Лекция №19
Измерение фазового сдвига. Лекция №19 Тепловое излучение и его характеристики
Тепловое излучение и его характеристики Электромагнетизм. Уравнения Максвелла. Лекция 4
Электромагнетизм. Уравнения Максвелла. Лекция 4 Конспект и презентация урока по темеПервоначальные сведения о строении вещества
Конспект и презентация урока по темеПервоначальные сведения о строении вещества использование элементов проблемного обучения на уроках физики
использование элементов проблемного обучения на уроках физики Детали машин. Муфты
Детали машин. Муфты Экзамен по дисциплинам Электропривод
Экзамен по дисциплинам Электропривод Direct Shift Gearbox. Коробки передач
Direct Shift Gearbox. Коробки передач Лабораторная работа №4 Изучение капиллярных явлений, обусловленных поверхностным натяжением жидкости 10 класс.
Лабораторная работа №4 Изучение капиллярных явлений, обусловленных поверхностным натяжением жидкости 10 класс. Формирование навыков технического конструирования при изучении простых механизмов как основ двигательных конструкций
Формирование навыков технического конструирования при изучении простых механизмов как основ двигательных конструкций Физическое Поле Чудес
Физическое Поле Чудес Электродинамика. Заряды
Электродинамика. Заряды Трансформатор. Передача електроенергії та її використання
Трансформатор. Передача електроенергії та її використання Електричний заряд. Закон збереження електричного заряду
Електричний заряд. Закон збереження електричного заряду Буксовые узлы электровозов ВЛ80, ВЛ85, 2ЭС5К
Буксовые узлы электровозов ВЛ80, ВЛ85, 2ЭС5К Линзы. Рассеивающая линза
Линзы. Рассеивающая линза Lektsia_8_Interferentsia
Lektsia_8_Interferentsia Технічний стан транспортних засобів та обладнання (категорія В)
Технічний стан транспортних засобів та обладнання (категорія В) Колесный движитель автомобиля
Колесный движитель автомобиля Гамма-гамма-каротаж
Гамма-гамма-каротаж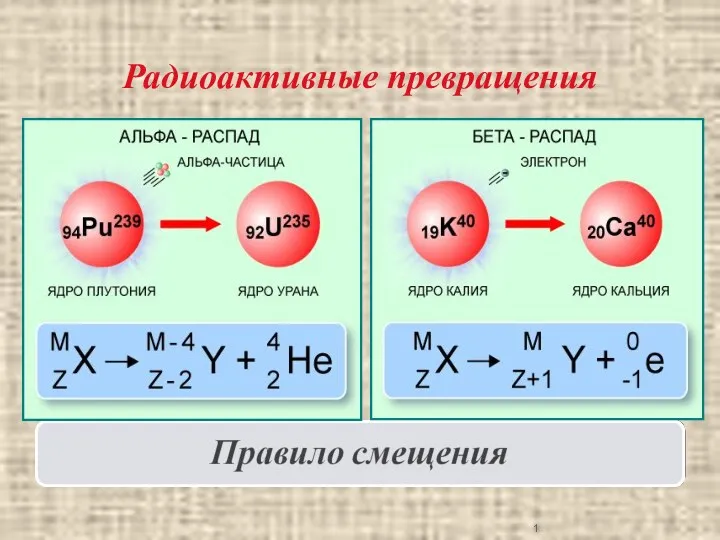 ИЗОТОПЫ
ИЗОТОПЫ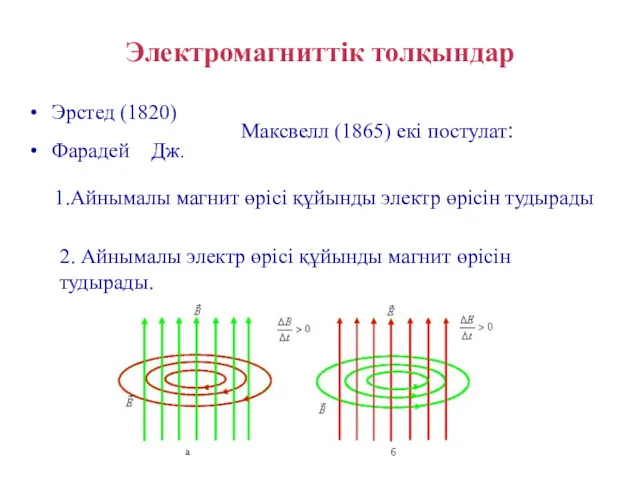 Электромагниттік толқындар
Электромагниттік толқындар Микроструктура тропосферы
Микроструктура тропосферы Решение задач. Силы в природе, законы Ньютона
Решение задач. Силы в природе, законы Ньютона Изобретени радио А.С. Поповым
Изобретени радио А.С. Поповым