- Классификация плоских механизмов

Содержание
- 2. Для изучения и совершенствования методов строения, кинематического и динамического анализа механизмов наиболее рациональна структурная классификация, основанная
- 4. Механизмы с низшими кинематическими парами (рычажные) Механизмы, содержащие только низшие кинематические пары 5 кл., получили широкое
- 5. С помощью таких механизмов легко осуществляется преобразование вращательного движения в возвратно-поступательное, колебательное или сложное движение с
- 6. Основной принцип образования рычажных механизмов по Ассуру: любой механизм может быть образован из основного механизма и
- 7. Основной механизм по Ассуру – это двухзвенный механизм, состоящий из стойки и начального звена. Двухзвенный механизм
- 8. Группа Ассура содержит лишь низшие кинематические пары пятого класса. Тогда структурная формула группы Ассура имеет вид
- 9. В зависимости от числа звеньев и кинематических пар в группе Ассура эти группы могут быть различной
- 10. Кинематическая пара, образованная звеньями группы, называется внутренней. Кинематические пары, с помощью которых данная группа присоединяется к
- 11. В зависимости от вида внутренней и внешних кинематических пар различают двухповодковые группы второго класса пяти видов
- 12. В двухповодковой группе второго вида одна внешняя кинематическая пара поступательная.
- 13. В группе третьего вида внутренняя пара поступательная.
- 14. В группе четвертого вида обе внешние пары поступательные. В группе пятого вида – внутренняя и одна
- 17. Из всего изложенного можно сделать следующие выводы: - класс группы Ассура определяется наивысшим классом контура, входящего
- 18. Последовательность структурного анализа механизма 1. Определяется количество звеньев механизма. 2. Перечисляются и характеризуются кинематические пары механизма.
- 19. 5. Выделяют из состава механизма основной механизм и группы Ассура, определяют последовательность их наслоения на основной
- 20. Пример 1. Определить степень подвижности и класс механизме V– образного aдвигателя внутреннего сгорания.
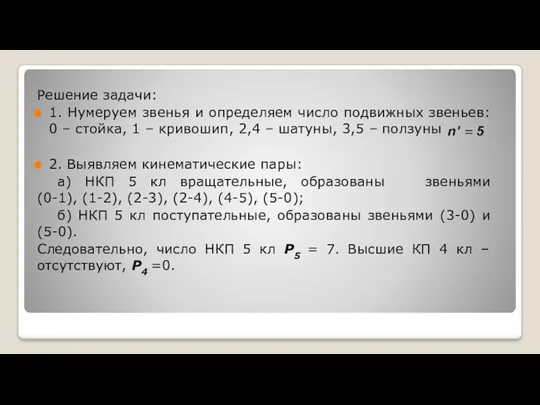
- 22. Решение задачи: 1. Нумеруем звенья и определяем число подвижных звеньев: 0 – стойка, 1 – кривошип,
- 23. 3. Определяем степень подвижности механизма по формуле Чебышева: Следовательно, в данном механизме должно быть только одно
- 24. 5. Рассматриваем последовательное присоединение (наслоение) на основной механизм структурных групп. Звенья (2–3) образовывают структурную группу 2-го
- 25. Запишем структурную формулу строения механизма:
- 27. Скачать презентацию
Для изучения и совершенствования методов строения, кинематического и динамического анализа механизмов
Для изучения и совершенствования методов строения, кинематического и динамического анализа механизмов

Механизмы с низшими
кинематическими парами (рычажные)
Механизмы, содержащие только низшие кинематические пары
Механизмы с низшими
кинематическими парами (рычажные)
Механизмы, содержащие только низшие кинематические пары
С помощью таких механизмов легко осуществляется преобразование вращательного движения в возвратно-поступательное,
С помощью таких механизмов легко осуществляется преобразование вращательного движения в возвратно-поступательное,
Основной принцип образования рычажных механизмов по Ассуру:
любой механизм может быть
Основной принцип образования рычажных механизмов по Ассуру:
любой механизм может быть
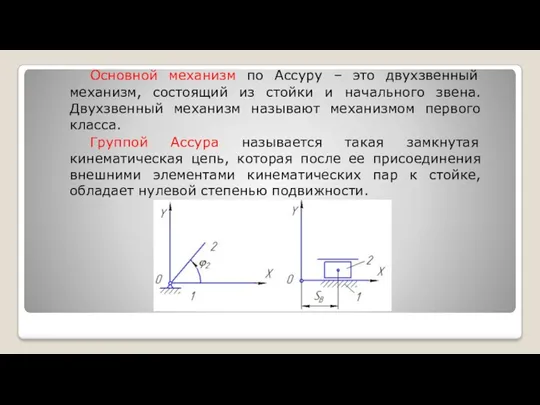
Основной механизм по Ассуру – это двухзвенный механизм, состоящий из стойки
Основной механизм по Ассуру – это двухзвенный механизм, состоящий из стойки
Группа Ассура содержит лишь низшие кинематические пары пятого класса. Тогда структурная
Группа Ассура содержит лишь низшие кинематические пары пятого класса. Тогда структурная
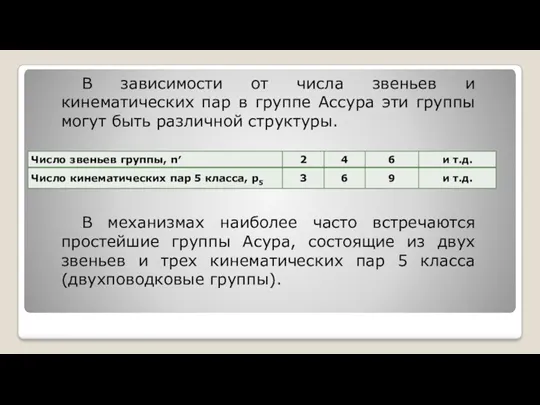
В зависимости от числа звеньев и кинематических пар в группе Ассура
В зависимости от числа звеньев и кинематических пар в группе Ассура
Кинематическая пара, образованная звеньями группы, называется внутренней. Кинематические пары, с помощью
Кинематическая пара, образованная звеньями группы, называется внутренней. Кинематические пары, с помощью
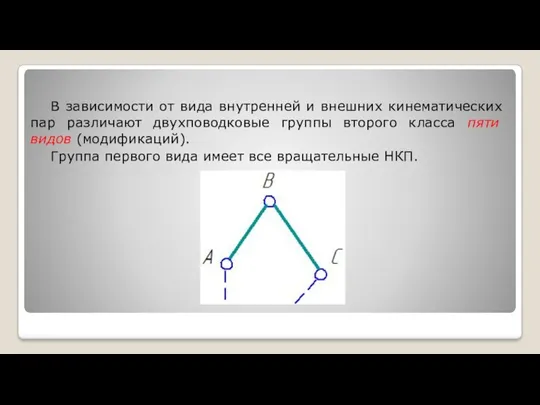
В зависимости от вида внутренней и внешних кинематических пар различают двухповодковые
В зависимости от вида внутренней и внешних кинематических пар различают двухповодковые
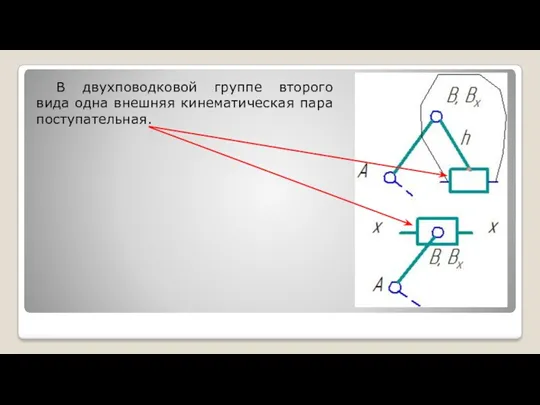
В двухповодковой группе второго вида одна внешняя кинематическая пара поступательная.
В двухповодковой группе второго вида одна внешняя кинематическая пара поступательная.
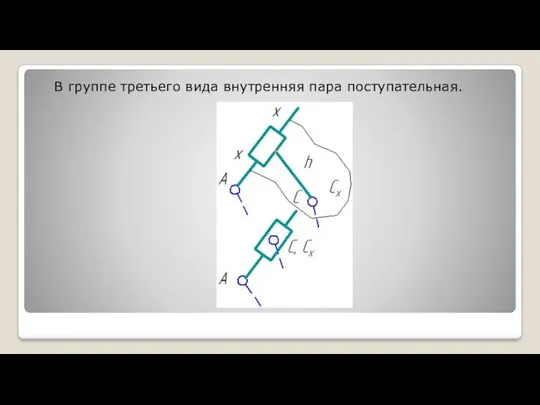
В группе третьего вида внутренняя пара поступательная.
В группе третьего вида внутренняя пара поступательная.
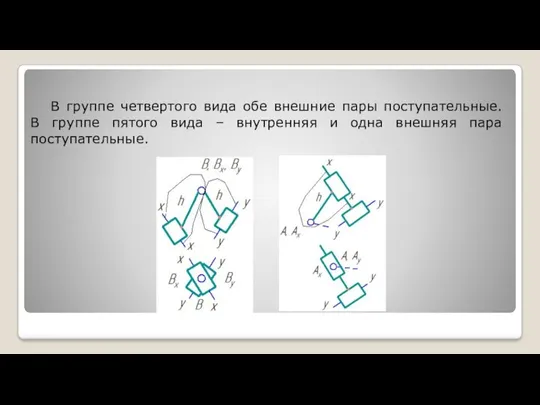
В группе четвертого вида обе внешние пары поступательные. В группе пятого
В группе четвертого вида обе внешние пары поступательные. В группе пятого


Из всего изложенного можно сделать следующие выводы:
- класс группы Ассура
Из всего изложенного можно сделать следующие выводы:
- класс группы Ассура
Последовательность
структурного анализа механизма
1. Определяется количество звеньев механизма.
2. Перечисляются и характеризуются
Последовательность
структурного анализа механизма
1. Определяется количество звеньев механизма.
2. Перечисляются и характеризуются
5. Выделяют из состава механизма основной механизм и группы Ассура, определяют
5. Выделяют из состава механизма основной механизм и группы Ассура, определяют
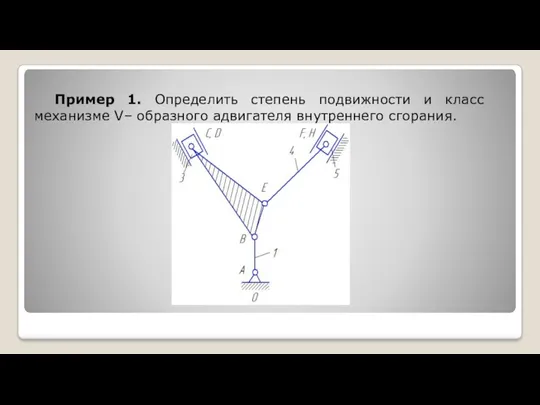
Пример 1. Определить степень подвижности и класс механизме V– образного aдвигателя
Пример 1. Определить степень подвижности и класс механизме V– образного aдвигателя

Решение задачи:
1. Нумеруем звенья и определяем число подвижных звеньев: 0 –
Решение задачи:
1. Нумеруем звенья и определяем число подвижных звеньев: 0 –
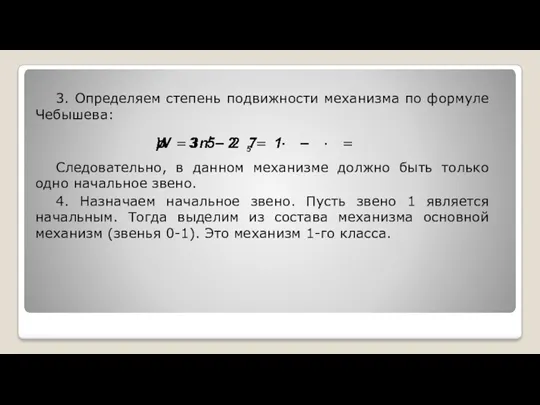
3. Определяем степень подвижности механизма по формуле Чебышева:
Следовательно, в данном механизме
3. Определяем степень подвижности механизма по формуле Чебышева:
Следовательно, в данном механизме
5. Рассматриваем последовательное присоединение (наслоение) на основной механизм структурных групп. Звенья
5. Рассматриваем последовательное присоединение (наслоение) на основной механизм структурных групп. Звенья
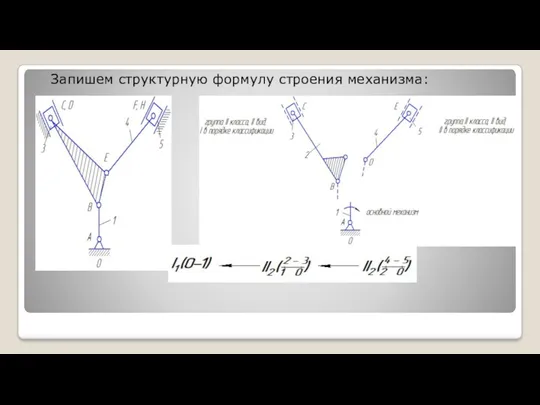
Запишем структурную формулу строения механизма:
Запишем структурную формулу строения механизма:
 Физика – это интересно! Внеклассное мероприятие по физике. 7 класс
Физика – это интересно! Внеклассное мероприятие по физике. 7 класс Электризация тел. Взаимодействие тел. Два вида зарядов
Электризация тел. Взаимодействие тел. Два вида зарядов Общее устройство тракторов
Общее устройство тракторов Ядерная физика. (Урок-обобщение). 9 класс
Ядерная физика. (Урок-обобщение). 9 класс Бұралған білік үшін беріктік шарты
Бұралған білік үшін беріктік шарты урок физики в 10 классе Теплопередача. Количество теплоты
урок физики в 10 классе Теплопередача. Количество теплоты Ядерные реакции
Ядерные реакции Колебания и волны. Гармонические колебания
Колебания и волны. Гармонические колебания UTC (PTB) as the basis for legal time in Germany: realization and dissemination
UTC (PTB) as the basis for legal time in Germany: realization and dissemination Свойства твердых тел
Свойства твердых тел Влажность воздуха. Способы измерения влажности воздуха.
Влажность воздуха. Способы измерения влажности воздуха. Електричний струм. Закон Ома
Електричний струм. Закон Ома Рычаги в технике, быту и природе
Рычаги в технике, быту и природе Электрическое поле в диэлектриках. Тема 5
Электрическое поле в диэлектриках. Тема 5 Механические редукторы
Механические редукторы Электромагниттік толқындар
Электромагниттік толқындар Подсистемы системы Корабль. Подсистема Энергия
Подсистемы системы Корабль. Подсистема Энергия Радиациялық сәулелену
Радиациялық сәулелену Технологический процесс ремонта ступицы колеса автомобиля
Технологический процесс ремонта ступицы колеса автомобиля Геоэлектрика. (Лекция 7)
Геоэлектрика. (Лекция 7) Основные понятия и определения механики жидкости и газа
Основные понятия и определения механики жидкости и газа Урок открытия новых знаний по ФГОС
Урок открытия новых знаний по ФГОС Колесо с резиновыми спицами
Колесо с резиновыми спицами Рух в природі та основа відліку часу
Рух в природі та основа відліку часу Трансформатор
Трансформатор Презентация урок-сказка Взаимодействие тел физика 7 кл
Презентация урок-сказка Взаимодействие тел физика 7 кл Ременные передачи. Лекция 8
Ременные передачи. Лекция 8 Электродвижущая сила. Закон Ома для полной цепи. Соединения проводников электрического тока
Электродвижущая сила. Закон Ома для полной цепи. Соединения проводников электрического тока