- Колебания и волны. Гармонические колебания

Содержание
- 2. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ Виды и признаки колебаний В физике особенно выделяют колебания двух видов – механические и
- 3. о Fв = −kx - возвращающая сила, Fвн = +kx – внешняя сила, k - жесткость
- 4. Любая колебательная система, в которой возвращаю-щая сила прямо пропорциональна смещению, взятому с противоположным знаком (например, F
- 5. 2. Параметры гармонических колебаний Расстояние груза от положения равновесия до точки, в которой находится груз, называют
- 6. Т – период колебаний – минимальный промежуток време-ни, по истечении которого повторяются значения всех физи-ческих величин,
- 7. Колебания характеризуются не только смещением х, но и скоростью υx и ускорением ax: x=Asin(ωt+φ0), υx= dx/dt
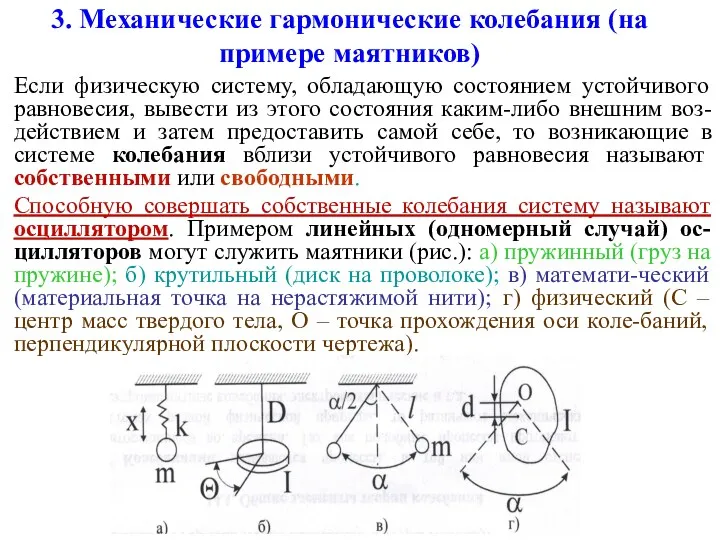
- 8. 3. Механические гармонические колебания (на примере маятников) Если физическую систему, обладающую состоянием устойчивого равновесия, вывести из
- 9. Рассмотрим случай а)– пружинный маятник. Второй закон Ньютона для колеблющегося тела для одномерного случая можно записать
- 10. Потенциальная энергия ( пружинный маятник): Полная механическая энергия: Классическая колеблющаяся точка не может выйти за границы
- 11. г) физический маятник Физический маятник – твердое тело, которое может совершать колебания под действием собственной силы
- 12. Сравнивая с уравнением свободных незатухающих гармонических колебаний: d2x/dt2 + ω2x = 0 , имеем для физического
- 13. Свободные гармонические колебания в электрическом колебательном контуре Простейшим колебательным контуром является замкнутая цепь, состоящая из емкости
- 14. 4. Способы представления гармонических колебаний Гармонические колебания можно представить несколькими способами: аналитический {x = Acos(ωt +
- 15. 5. Сложение гармонических колебаний одного направления и одинаковой частоты. Биения Пусть точка одновременно участвует в двух
- 16. 1) Разность фаз равна нулю или четному числу π, то есть φ2 − φ1 = 2πm,
- 17. Когерентными называются колебания, разность фаз которых во времени постоянна; т.к. ∆Ф(t) = (ω2 − ω1)t +
- 18. [2ωt >>Δω; cos(-Δωt)=cos(Δωt)] Косинус берется по модулю, так как функция четная и поэтому частота биений ωб
- 19. Вообще, колебания вида x = A(t)cos[ωt + φ(t)] называются модулированными. Частные случаи: амплитудная моду-ляция и модулирование
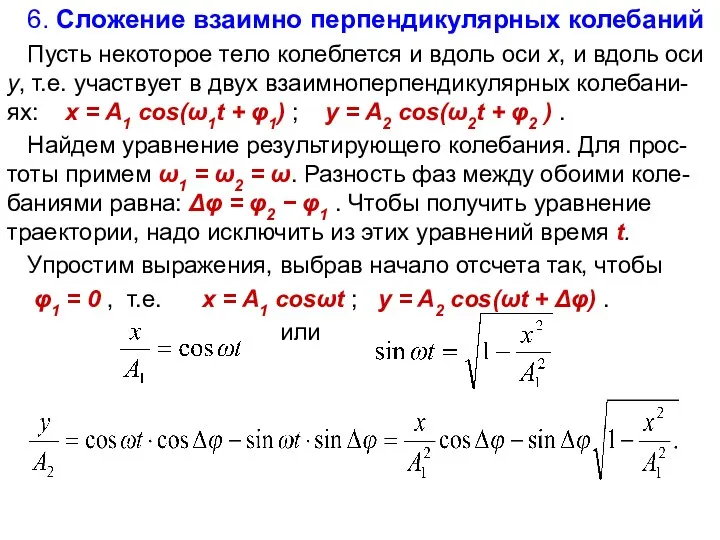
- 20. 6. Сложение взаимно перпендикулярных колебаний Пусть некоторое тело колеблется и вдоль оси x, и вдоль оси
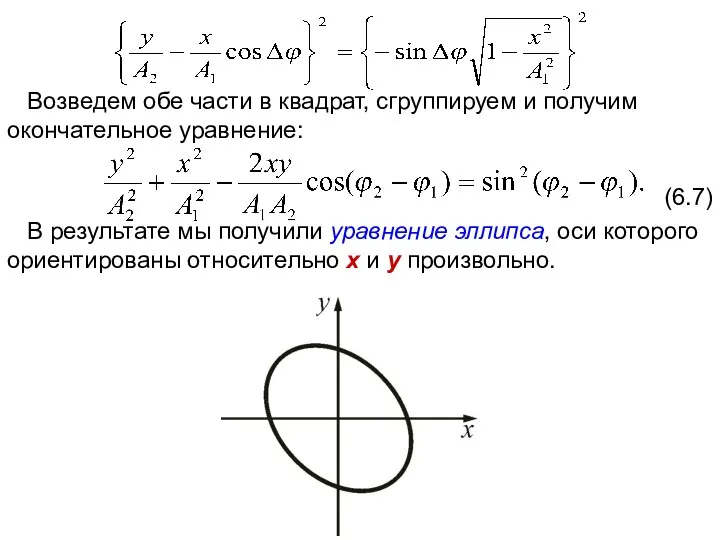
- 21. Возведем обе части в квадрат, сгруппируем и получим окончательное уравнение: (6.7) В результате мы получили уравнение
- 22. Рассмотрим частные случаи решения уравнения (6.7) Начальные фазы колебаний одинаковы: φ1 = φ2 , т.е. φ2
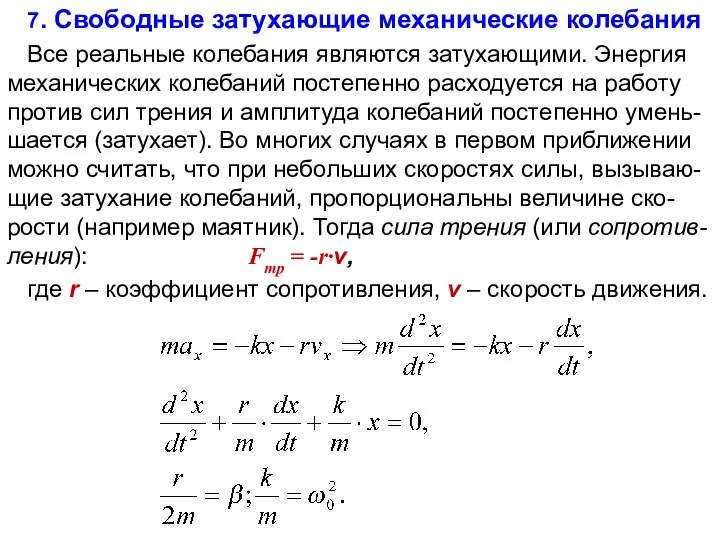
- 23. 7. Свободные затухающие механические колебания Все реальные колебания являются затухающими. Энергия механических колебаний постепенно расходуется на
- 24. Однородное дифференциальное уравнение второго по-рядка, описывающее затухающее колебательное дви-жение, запишется в виде: Решение этого уравнения имеет
- 25. Натуральный логарифм отно-шения амплитуд, следующих друг за другом через период Т, называется логарифмическим декрементом затухания χ:
- 26. Следовательно, коэффициент затухания β есть физи-ческая величина, обратная времени, в течение которого амплитуда уменьшается в е
- 28. Скачать презентацию
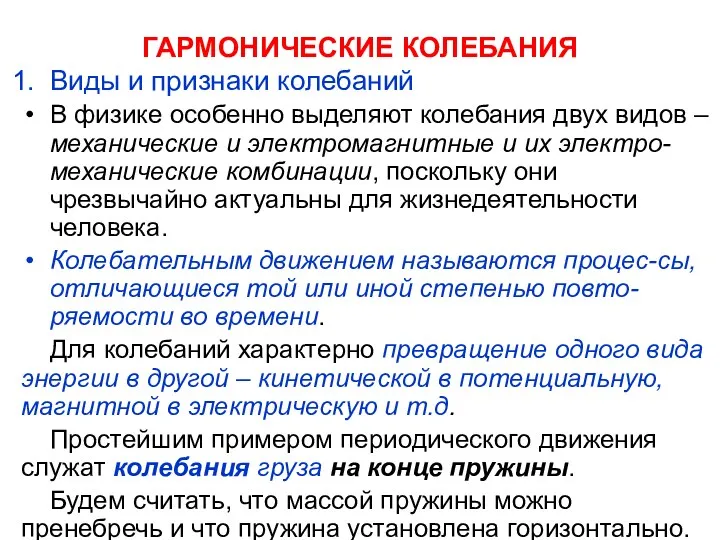
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
Виды и признаки колебаний
В физике особенно выделяют колебания двух видов
ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
Виды и признаки колебаний
В физике особенно выделяют колебания двух видов
о
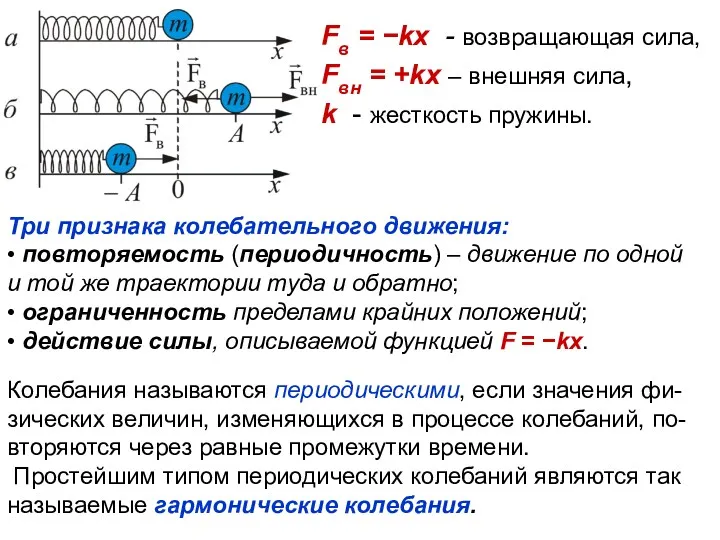
Fв = −kx - возвращающая сила,
Fвн = +kx – внешняя сила,
k
о
Fв = −kx - возвращающая сила,
Fвн = +kx – внешняя сила,
k
Любая колебательная система, в которой возвращаю-щая сила прямо пропорциональна смещению, взятому
Любая колебательная система, в которой возвращаю-щая сила прямо пропорциональна смещению, взятому
2. Параметры гармонических колебаний
Расстояние груза от положения равновесия до точки, в
2. Параметры гармонических колебаний
Расстояние груза от положения равновесия до точки, в
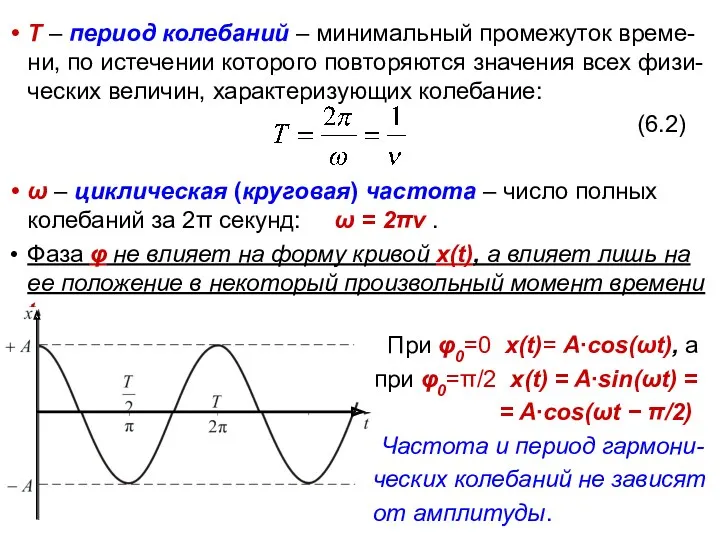
Т – период колебаний – минимальный промежуток време-ни, по истечении которого
Т – период колебаний – минимальный промежуток време-ни, по истечении которого
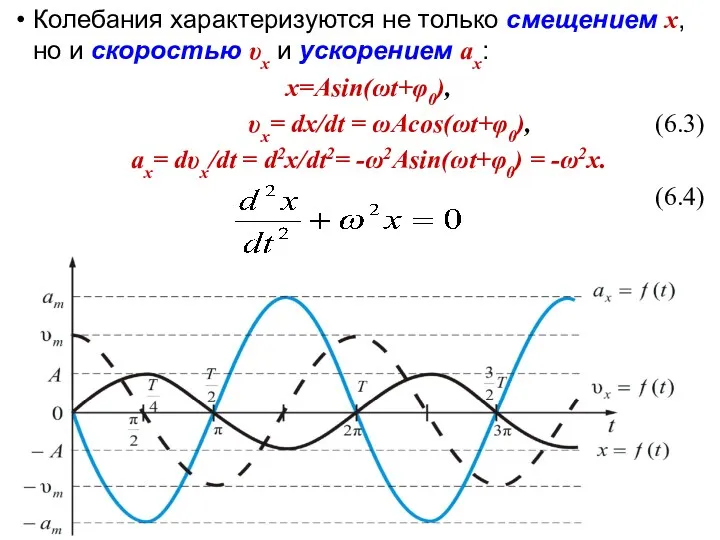
Колебания характеризуются не только смещением х, но и скоростью υx и
Колебания характеризуются не только смещением х, но и скоростью υx и
3. Механические гармонические колебания (на примере маятников)
Если физическую систему, обладающую состоянием
3. Механические гармонические колебания (на примере маятников)
Если физическую систему, обладающую состоянием
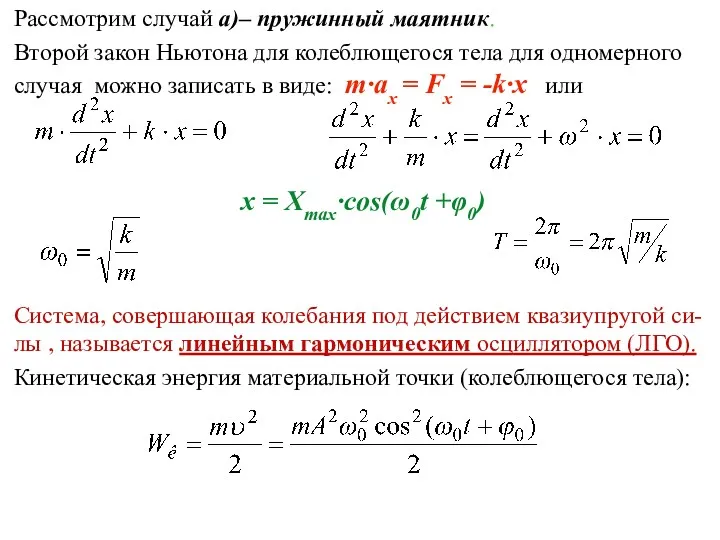
Рассмотрим случай а)– пружинный маятник.
Второй закон Ньютона для колеблющегося тела для
Рассмотрим случай а)– пружинный маятник.
Второй закон Ньютона для колеблющегося тела для
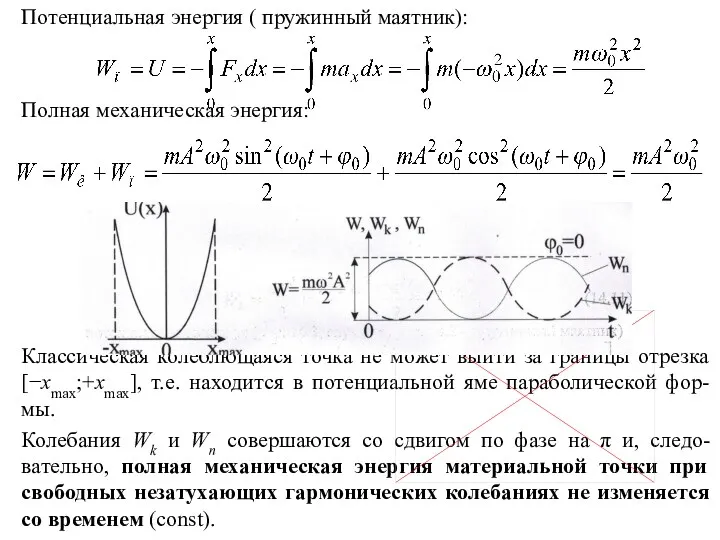
Потенциальная энергия ( пружинный маятник):
Полная механическая энергия:
Классическая колеблющаяся точка не может
Потенциальная энергия ( пружинный маятник):
Полная механическая энергия:
Классическая колеблющаяся точка не может
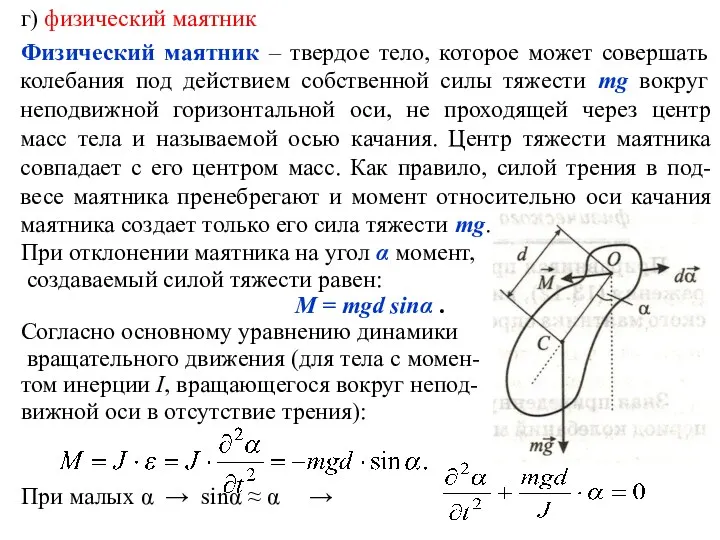
г) физический маятник
Физический маятник – твердое тело, которое может совершать колебания
г) физический маятник
Физический маятник – твердое тело, которое может совершать колебания
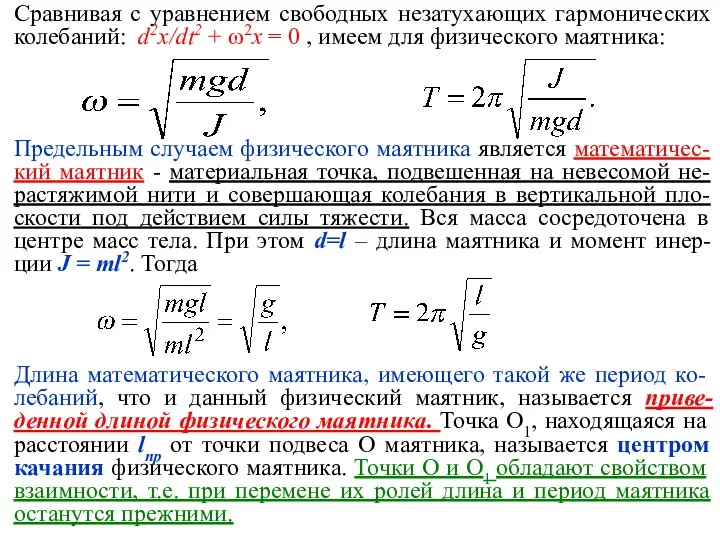
Сравнивая с уравнением свободных незатухающих гармонических колебаний: d2x/dt2 + ω2x =
Сравнивая с уравнением свободных незатухающих гармонических колебаний: d2x/dt2 + ω2x =
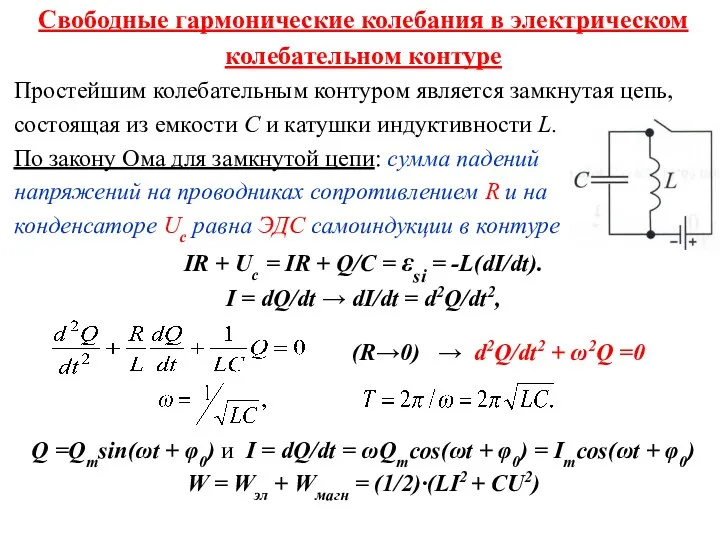
Свободные гармонические колебания в электрическом
колебательном контуре
Простейшим колебательным контуром является замкнутая цепь,
состоящая
Свободные гармонические колебания в электрическом
колебательном контуре
Простейшим колебательным контуром является замкнутая цепь,
состоящая
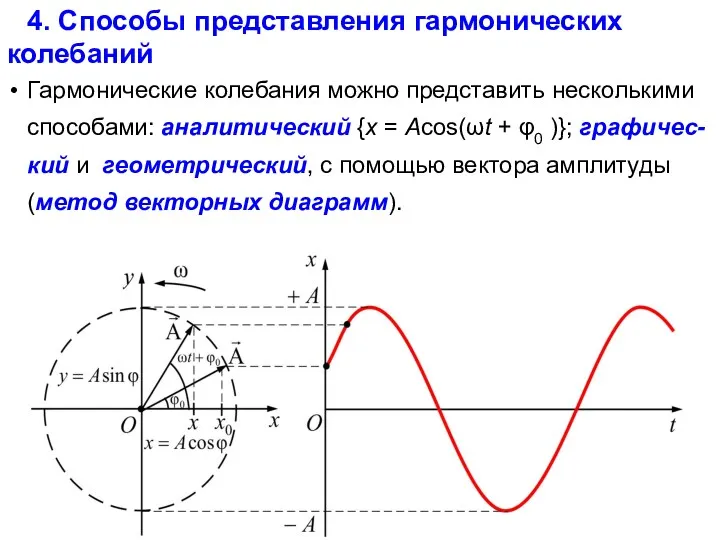
4. Способы представления гармонических колебаний
Гармонические колебания можно представить несколькими способами: аналитический
4. Способы представления гармонических колебаний
Гармонические колебания можно представить несколькими способами: аналитический
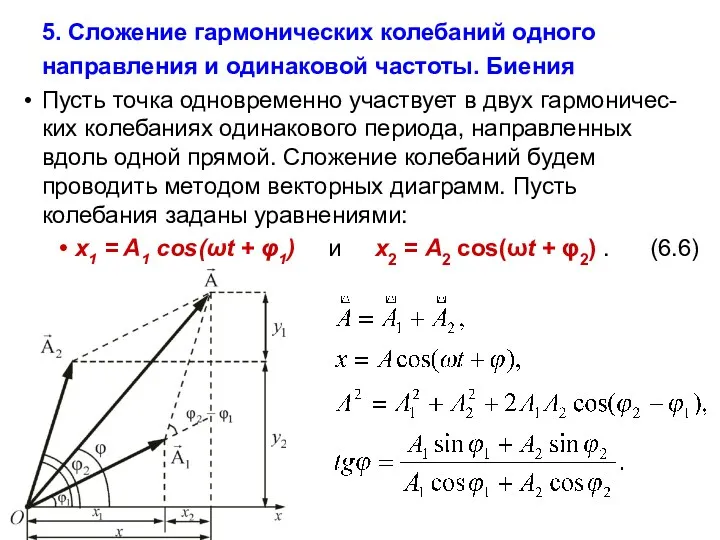
5. Сложение гармонических колебаний одного
направления и одинаковой частоты. Биения
Пусть точка одновременно
5. Сложение гармонических колебаний одного
направления и одинаковой частоты. Биения
Пусть точка одновременно
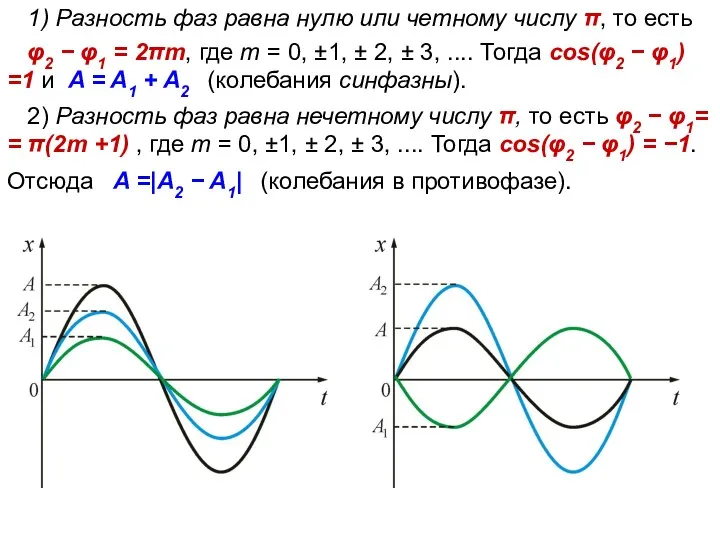
1) Разность фаз равна нулю или четному числу π, то есть
φ2
1) Разность фаз равна нулю или четному числу π, то есть
φ2
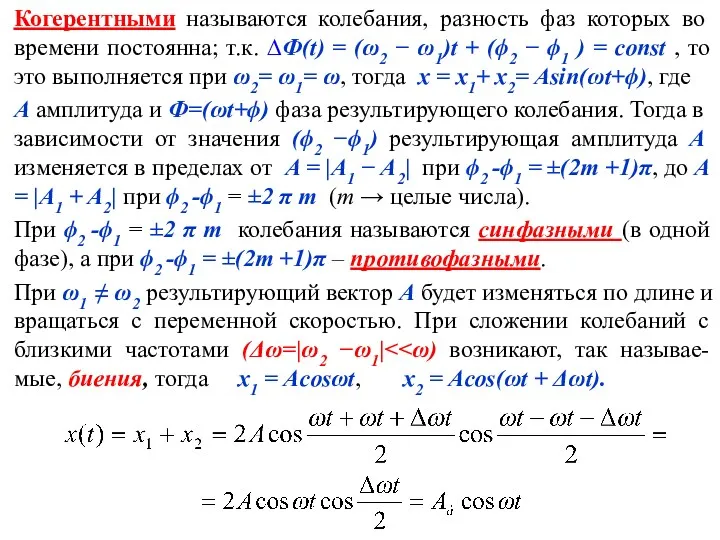
Когерентными называются колебания, разность фаз которых во времени постоянна; т.к. ∆Ф(t)
Когерентными называются колебания, разность фаз которых во времени постоянна; т.к. ∆Ф(t)
![[2ωt >>Δω; cos(-Δωt)=cos(Δωt)] Косинус берется по модулю, так как функция](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/394095/slide-17.jpg)
[2ωt >>Δω; cos(-Δωt)=cos(Δωt)]
Косинус берется по модулю, так как функция четная
[2ωt >>Δω; cos(-Δωt)=cos(Δωt)]
Косинус берется по модулю, так как функция четная
![Вообще, колебания вида x = A(t)cos[ωt + φ(t)] называются модулированными.](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/394095/slide-18.jpg)
Вообще, колебания вида x = A(t)cos[ωt + φ(t)] называются модулированными. Частные
Вообще, колебания вида x = A(t)cos[ωt + φ(t)] называются модулированными. Частные
6. Сложение взаимно перпендикулярных колебаний
Пусть некоторое тело колеблется и вдоль оси
6. Сложение взаимно перпендикулярных колебаний
Пусть некоторое тело колеблется и вдоль оси
Возведем обе части в квадрат, сгруппируем и получим окончательное уравнение:
(6.7)
В результате
(6.7)
В результате
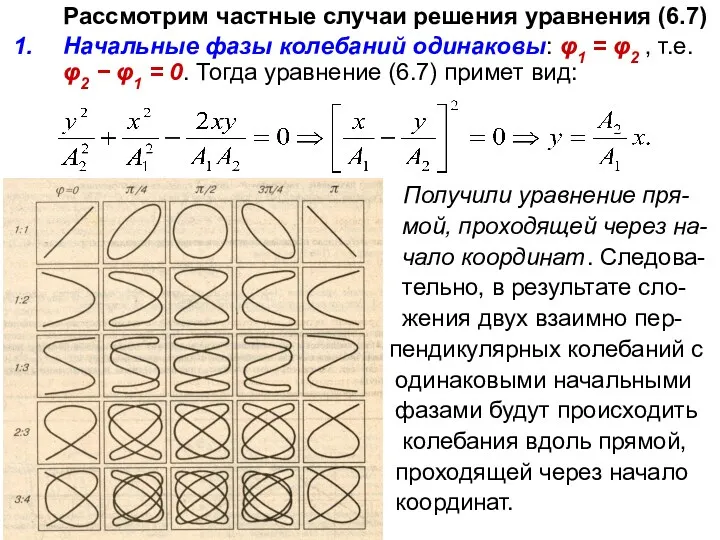
Рассмотрим частные случаи решения уравнения (6.7)
Начальные фазы колебаний одинаковы: φ1 =
Рассмотрим частные случаи решения уравнения (6.7)
Начальные фазы колебаний одинаковы: φ1 =
7. Свободные затухающие механические колебания
Все реальные колебания являются затухающими. Энергия механических
7. Свободные затухающие механические колебания
Все реальные колебания являются затухающими. Энергия механических
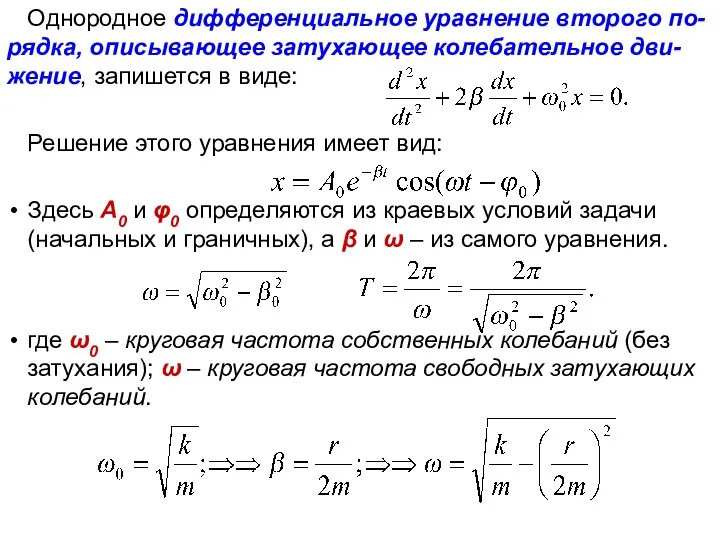
Однородное дифференциальное уравнение второго по-рядка, описывающее затухающее колебательное дви-жение, запишется в
Однородное дифференциальное уравнение второго по-рядка, описывающее затухающее колебательное дви-жение, запишется в
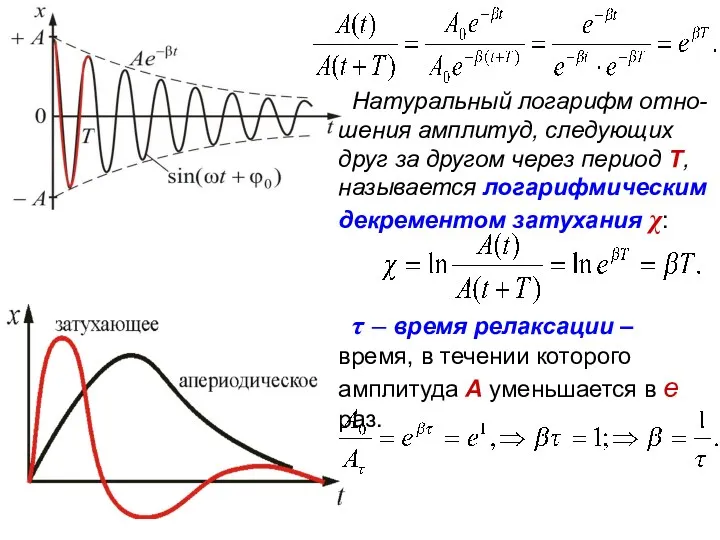
Натуральный логарифм отно-шения амплитуд, следующих друг за другом через период Т,
Натуральный логарифм отно-шения амплитуд, следующих друг за другом через период Т,
Следовательно, коэффициент затухания β есть физи-ческая величина, обратная времени, в течение
Следовательно, коэффициент затухания β есть физи-ческая величина, обратная времени, в течение
 Электрический ток. Источники электрического тока
Электрический ток. Источники электрического тока Эксплуатация, техобслуживание и диагностика неисправностей
Эксплуатация, техобслуживание и диагностика неисправностей Тепловые явления. Обобщающий урок
Тепловые явления. Обобщающий урок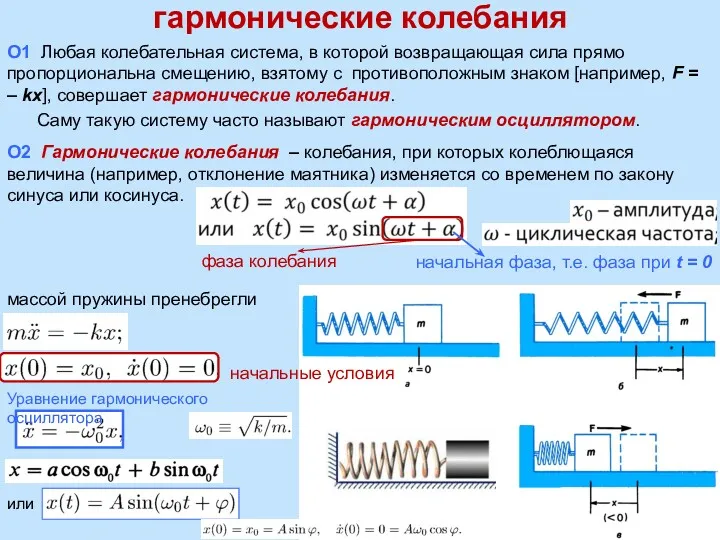 Гармонические колебания
Гармонические колебания Механические колебания. Свойства ультразвука
Механические колебания. Свойства ультразвука Частотные характеристики линейных стационарных автоматических систем. Тема 4
Частотные характеристики линейных стационарных автоматических систем. Тема 4 Строение и эволюция Вселенной
Строение и эволюция Вселенной Допуски и посадки
Допуски и посадки Резистор, конденсатор, катушка индуктивности в цепи переменного тока
Резистор, конденсатор, катушка индуктивности в цепи переменного тока Урок физики 8класс. Электрический ток. Источники тока.
Урок физики 8класс. Электрический ток. Источники тока. Физико-химические методы анализа
Физико-химические методы анализа Постоянный ток. Занятие 1
Постоянный ток. Занятие 1 Уравнение Шрёдингера
Уравнение Шрёдингера Презентация к уроку по теме Сила упругости
Презентация к уроку по теме Сила упругости Явление самоиндукции. Энергия магнитного поля
Явление самоиндукции. Энергия магнитного поля The horizon line
The horizon line Основы релятивистской механики
Основы релятивистской механики Электрические провода
Электрические провода Электричество и магнетизм. Электростатика
Электричество и магнетизм. Электростатика Источники звука. Звуковые колебания
Источники звука. Звуковые колебания Мікро- і наноелектроніка
Мікро- і наноелектроніка дополнение к уроку физики Испарение
дополнение к уроку физики Испарение Винтовая передача
Винтовая передача Новые цели школьного физического образования – новые учебные задачи
Новые цели школьного физического образования – новые учебные задачи Исследовательская работа Познай самого себя физика + химия +организм человека
Исследовательская работа Познай самого себя физика + химия +организм человека Fibrous proteins and their functions. Membrane proteins and their functions
Fibrous proteins and their functions. Membrane proteins and their functions Радіація та її джерела. Вплив на організм людини
Радіація та її джерела. Вплив на організм людини Теплотехника. Термодинамические свойства воды и водяного пара
Теплотехника. Термодинамические свойства воды и водяного пара