- Кінематичні та силові співвідношення в механічних передачах

Содержание
- 2. 2 1. Двигуни приводів. Загалом структуру довільної машини можна подати у вигляді такої схеми: енергоперетворювач (двигун)
- 3. 3 Двигуни постійного струму дозволяють плавно регулювати кутову швидкість. Найчастіше такі двигуни використовують у підіймально-транспортних машинах.
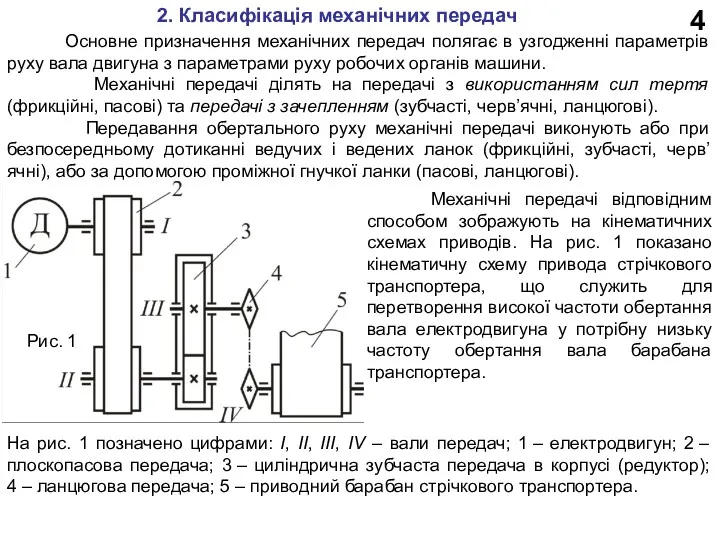
- 4. 4 2. Класифікація механічних передач Основне призначення механічних передач полягає в узгодженні параметрів руху вала двигуна
- 5. 5 Загальне передаточне число привода (рис. 1) дорівнює добутку передаточних чисел окремих передач: Класифікація механічних передач
- 6. 6 3. Силові та кінематичні співвідношення в механічних передачах Енергетичними (силовими) характеристиками механічної передачі є: 1.
- 7. 7 Загальний коефіцієнт к.к.д. привода, що складається з n послідовно з’єднаних передач, дорівнює добутку к.к.д. окремих
- 8. 8 Кінематичні співвідношення в механічних передачах 1. Колова швидкість v – це лінійна швидкість точок ланки
- 9. 9 4. Кінематичні співвідношення в черв’ячних передачах Передавання обертального руху між валами, осі яких мимобіжні в
- 10. 10 Архімедовий черв'як – циліндричний гвинт з трапецеподібним профілем різьби. У торцевому перерізі витки черв'яка окреслені
- 11. 11 Геометричні співвідношення в черв'ячній передачі з циліндричним архімедовим черв'яком Основні геометричні параметри черв’яка та черв’ячного
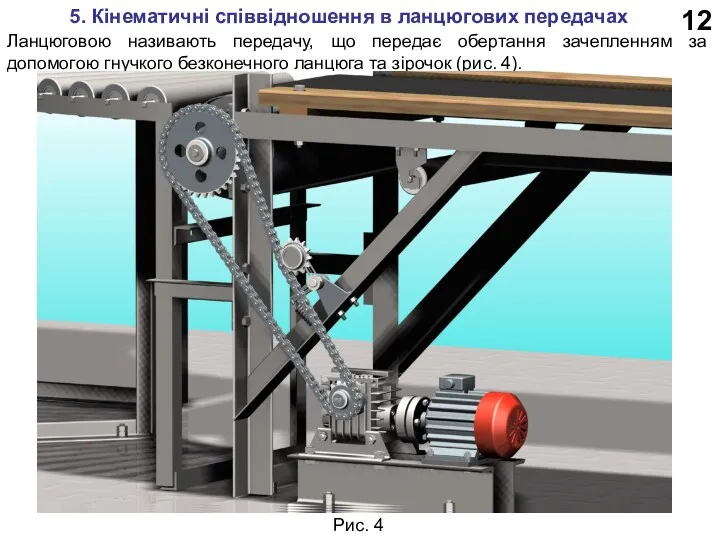
- 12. 12 5. Кінематичні співвідношення в ланцюгових передачах Ланцюговою називають передачу, що передає обертання зачепленням за допомогою
- 13. 13 У машинобудуванні мають застосування такі групи ланцюгів: - вантажні (підіймально-транспортні механізми) Кінематичні співвідношення в ланцюгових
- 15. Скачать презентацию
2
1. Двигуни приводів.
Загалом структуру довільної машини можна подати у
2
1. Двигуни приводів.
Загалом структуру довільної машини можна подати у
3
Двигуни постійного струму дозволяють плавно регулювати кутову швидкість. Найчастіше такі
3
Двигуни постійного струму дозволяють плавно регулювати кутову швидкість. Найчастіше такі
4
2. Класифікація механічних передач
Основне призначення механічних передач полягає в узгодженні
4
2. Класифікація механічних передач
Основне призначення механічних передач полягає в узгодженні
5
Загальне передаточне число привода (рис. 1) дорівнює добутку передаточних чисел
5
Загальне передаточне число привода (рис. 1) дорівнює добутку передаточних чисел
6
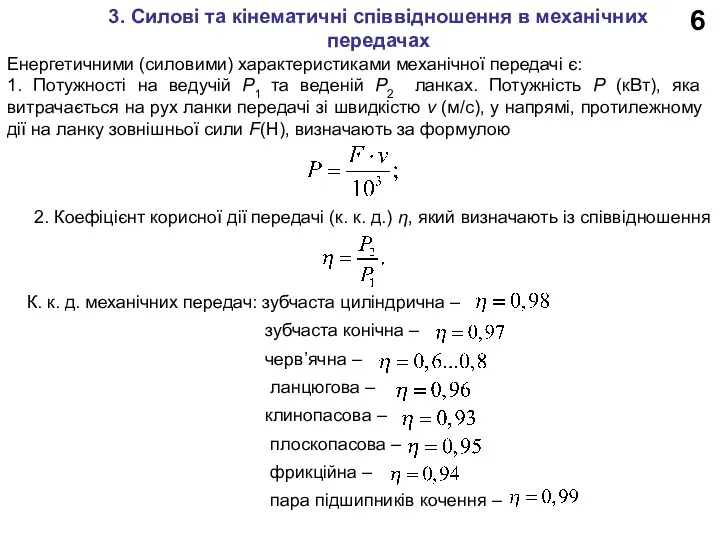
3. Силові та кінематичні співвідношення в механічних передачах
Енергетичними (силовими) характеристиками механічної
6
3. Силові та кінематичні співвідношення в механічних передачах
Енергетичними (силовими) характеристиками механічної

7
Загальний коефіцієнт к.к.д. привода, що складається з n послідовно з’єднаних передач,
7
Загальний коефіцієнт к.к.д. привода, що складається з n послідовно з’єднаних передач,
8
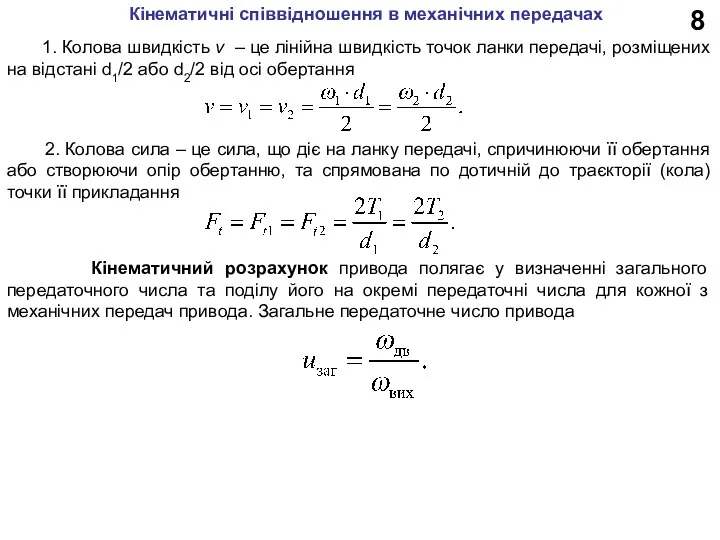
Кінематичні співвідношення в механічних передачах
1. Колова швидкість v – це
8
Кінематичні співвідношення в механічних передачах
1. Колова швидкість v – це

9
4. Кінематичні співвідношення в черв’ячних передачах
Передавання обертального руху між валами,
9
4. Кінематичні співвідношення в черв’ячних передачах
Передавання обертального руху між валами,
10
Архімедовий черв'як – циліндричний гвинт з трапецеподібним профілем різьби. У
10
Архімедовий черв'як – циліндричний гвинт з трапецеподібним профілем різьби. У
11
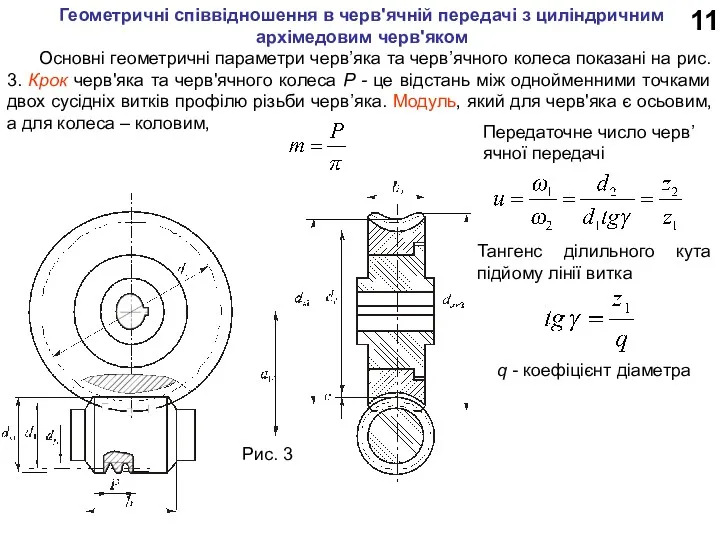
Геометричні співвідношення в черв'ячній передачі з циліндричним
архімедовим черв'яком
Основні геометричні
11
Геометричні співвідношення в черв'ячній передачі з циліндричним
архімедовим черв'яком
Основні геометричні
12
5. Кінематичні співвідношення в ланцюгових передачах
Ланцюговою називають передачу, що передає обертання
12
5. Кінематичні співвідношення в ланцюгових передачах
Ланцюговою називають передачу, що передає обертання
13
У машинобудуванні мають застосування такі групи ланцюгів:
- вантажні (підіймально-транспортні
13
У машинобудуванні мають застосування такі групи ланцюгів:
- вантажні (підіймально-транспортні
 Громкость звука. 9 класс
Громкость звука. 9 класс Своя игра по физике
Своя игра по физике Закон Кулона. Напряженность поля точечного заряда
Закон Кулона. Напряженность поля точечного заряда Ультразвук и его применение. Скорость звука в различных средах
Ультразвук и его применение. Скорость звука в различных средах Линзы. Построения изображений в линзах
Линзы. Построения изображений в линзах Центр тяжести
Центр тяжести Атом, атомное ядро, атомная энергия
Атом, атомное ядро, атомная энергия Синтез научного и религиозного познания. Теория физического вакуума
Синтез научного и религиозного познания. Теория физического вакуума Законам механики подчиняются движения всех окружающих нас тел
Законам механики подчиняются движения всех окружающих нас тел Ультразвуковой контроль
Ультразвуковой контроль Рентген сәулесі
Рентген сәулесі Нелінійна динаміка трубопроводу з рідиною в околі критичних швидкостей течії рідини
Нелінійна динаміка трубопроводу з рідиною в околі критичних швидкостей течії рідини Научные открытия Исаака Ньютона
Научные открытия Исаака Ньютона Диагностика и ремонт тормозной системы легкового автомобиля
Диагностика и ремонт тормозной системы легкового автомобиля Пример использования метода преобразования сложнозамкнутых электрических сетей в токах
Пример использования метода преобразования сложнозамкнутых электрических сетей в токах Определение скорости света
Определение скорости света Микроструктура материалов
Микроструктура материалов Dynamic models and the Kalman filter
Dynamic models and the Kalman filter Инерция. Масса как мера инертности
Инерция. Масса как мера инертности Способи вивільнення ядерної енергії. 11 клас
Способи вивільнення ядерної енергії. 11 клас Теория динамических систем. Введение
Теория динамических систем. Введение урок по физике (8 класс) по теме: ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ ПРОВОДНИКОВ
урок по физике (8 класс) по теме: ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ ПРОВОДНИКОВ 20231003_prezentatsiya
20231003_prezentatsiya Азбука великих имен
Азбука великих имен Постоянные магниты. Магнитное поле Земли.
Постоянные магниты. Магнитное поле Земли. Система вентиляции кузова электровоза ВЛ11
Система вентиляции кузова электровоза ВЛ11 Оптические приборы
Оптические приборы Общая электротехника и электроника. Цепи постоянного тока. Лекция 1
Общая электротехника и электроника. Цепи постоянного тока. Лекция 1