- Колебания (продолжение). Лекция № 6

Содержание
- 2. Свободные затухающие колебания В реальных механических колебательных системах энергия постепенно Рис. 6.1 расходуется на работу против
- 3. Ур-е движения тела под действием силы упругости и силы сопротивления при небольших скоростях имеет вид: ДУ
- 4. – коэффициент затухания системы, r – коэффициент сопротивления. Здесь Решение ур-я (6.1) при ω0 > β
- 5. Рис. 6.2 а) б) Затухающие колебания Процесс релаксации Амплитуда затухающих колебаний (рис. 6.2):
- 6. Период затухающих колебаний Если затухание велико (ω0 ≤ β ), то при выводе системы из положения
- 7. Логарифмический декремент затухания: Время релаксации За это время амплитуда уменьшается в e раз. Число колебаний, совершаемых
- 8. Добротность колебательной системы: Фазовая траектория затухающих колебаний на рис. 6.3. Рис. 6.3
- 9. сопротивления. Для этого на систему (рис. 6.4) воздействуют переменной внешней силой в простейшем случае изменяющейся по
- 10. где Ω – частота вынуждающей силы. Поведение системы описывается ДУ: (6.6)
- 11. Установившиеся вынужденные колебания Опыт показывает, что через некоторое время после начала действия вынуждающей силы в системе
- 12. где A – амплитуда колебаний объекта массой m, α – сдвиг фаз между колебаниями объекта и
- 13. Чтобы найти A и α, подставим решение (6.7) в ур-е (6.6): (6.8) Правая часть (6.8) –
- 14. Рис. 6.5 Построим векторную диаграмму при t=0.
- 15. откуда значение амплитуды (6.9) Из векторного многоугольника (см. рис. 6.5) находим Начальная фаза
- 16. Механический резонанс Резонанс – физическое явление, состоящее в резком возрастании амплитуды установившихся вынужденных колебаний системы, вызываемое
- 17. Найдем частоту вынуждающей силы, при которой амплитуда установившихся вынужденных колебаний будет максимальной, и, следовательно, выражение в
- 18. откуда резонансная частота (6.10) Подставив (6.10) в (6.9) определим амплитуду резонанса (6.11)
- 20. Скачать презентацию
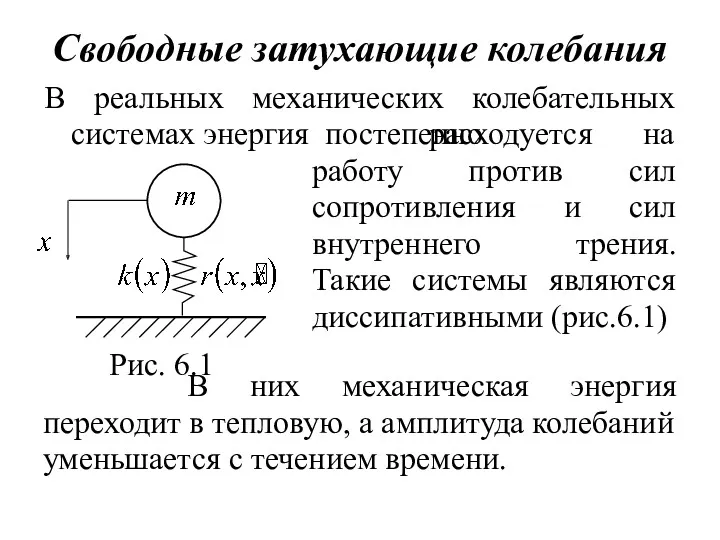
Свободные затухающие колебания
В реальных механических колебательных системах энергия постепенно
Рис. 6.1
Свободные затухающие колебания
В реальных механических колебательных системах энергия постепенно
Рис. 6.1
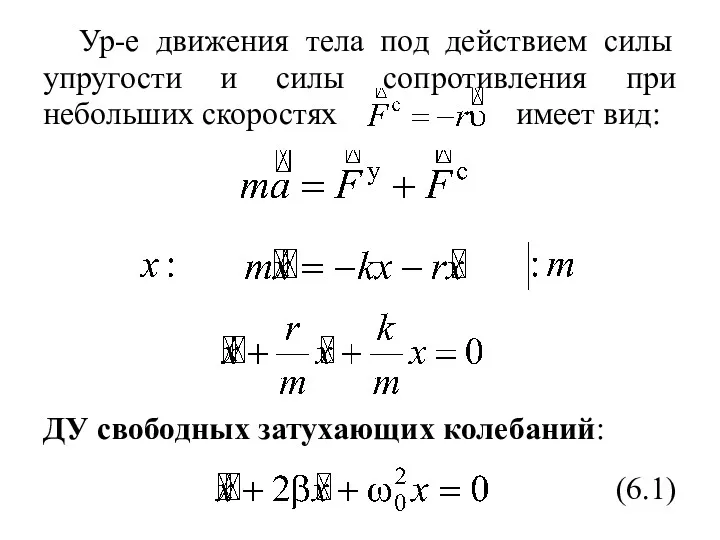
Ур-е движения тела под действием силы упругости и силы сопротивления при
Ур-е движения тела под действием силы упругости и силы сопротивления при
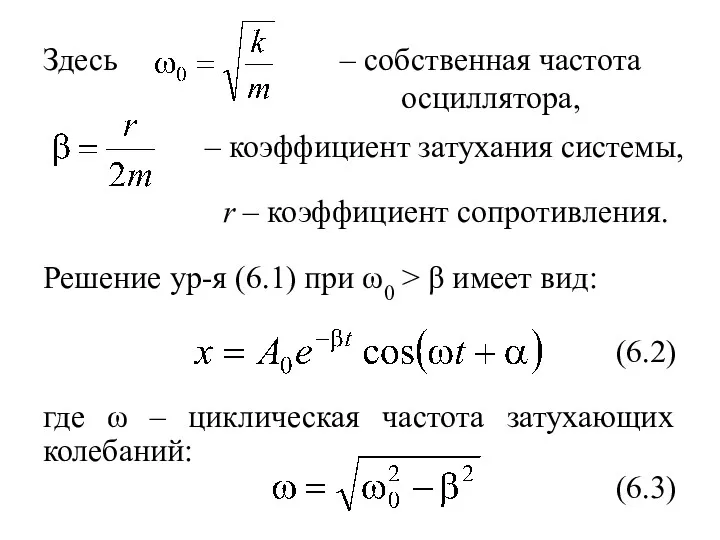
– коэффициент затухания системы,
r – коэффициент сопротивления.
Здесь
Решение ур-я (6.1) при
– коэффициент затухания системы,
r – коэффициент сопротивления.
Здесь
Решение ур-я (6.1) при
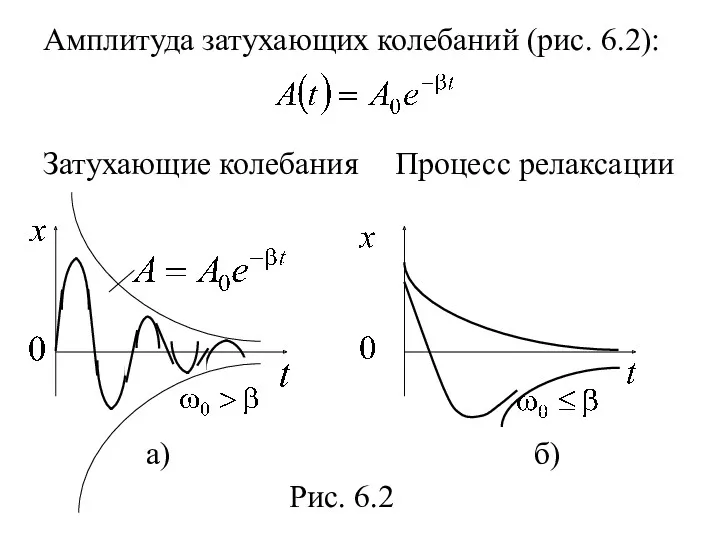
Рис. 6.2
а)
б)
Затухающие колебания
Процесс релаксации
Амплитуда затухающих колебаний (рис. 6.2):
Рис. 6.2
а)
б)
Затухающие колебания
Процесс релаксации
Амплитуда затухающих колебаний (рис. 6.2):
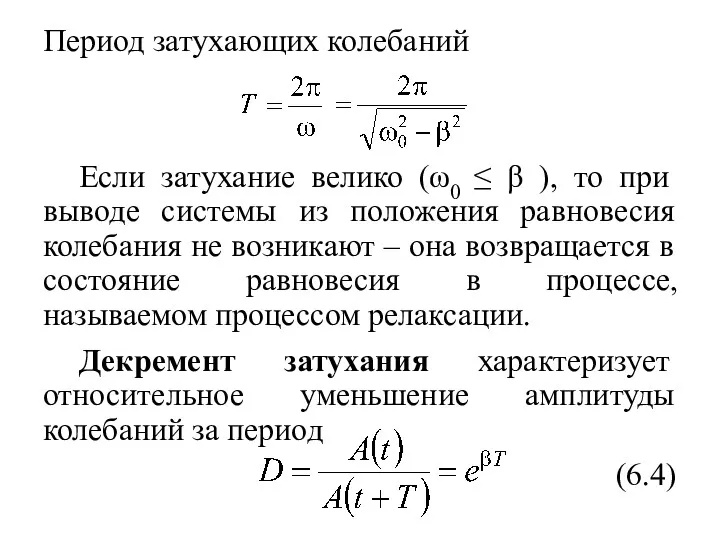
Период затухающих колебаний
Если затухание велико (ω0 ≤ β ), то при
Период затухающих колебаний
Если затухание велико (ω0 ≤ β ), то при
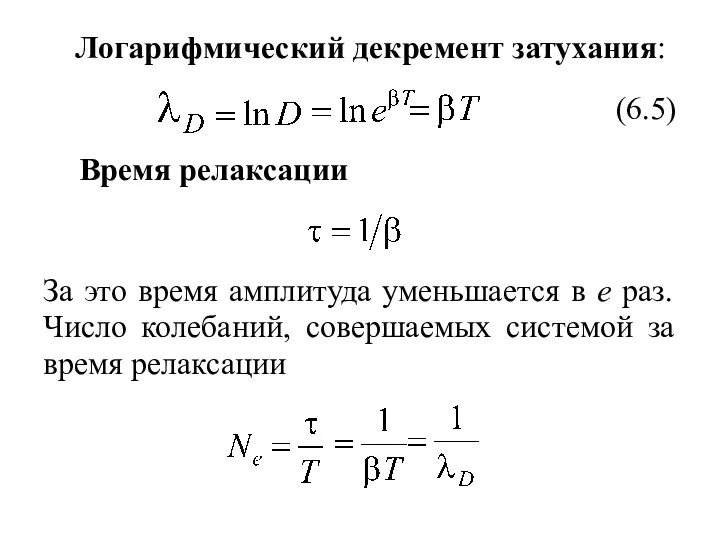
Логарифмический декремент затухания:
Время релаксации
За это время амплитуда уменьшается
Логарифмический декремент затухания:
Время релаксации
За это время амплитуда уменьшается
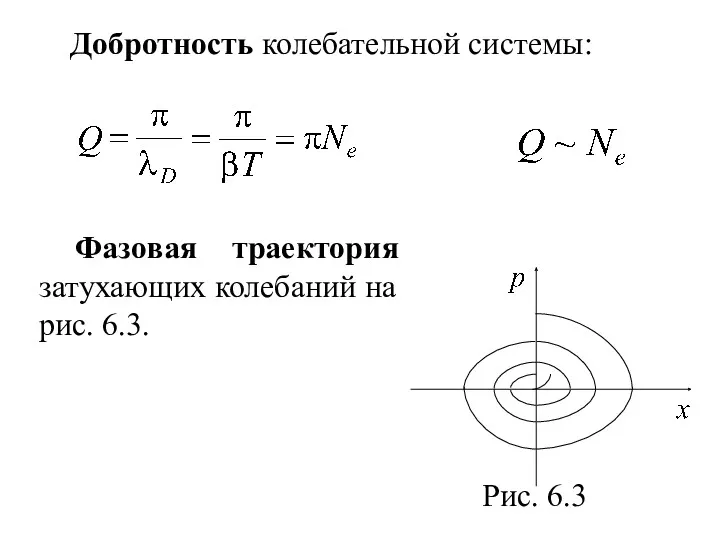
Добротность колебательной системы:
Фазовая траектория затухающих колебаний на рис. 6.3.
Рис. 6.3
Добротность колебательной системы:
Фазовая траектория затухающих колебаний на рис. 6.3.
Рис. 6.3
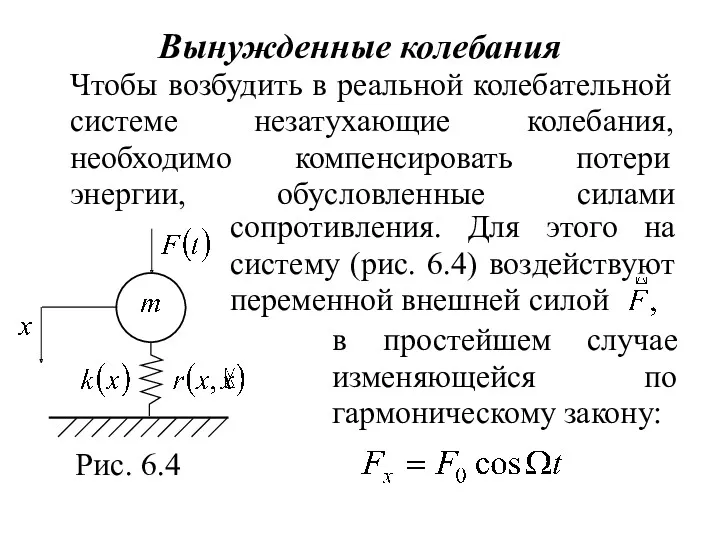
сопротивления. Для этого на систему (рис. 6.4) воздействуют переменной внешней силой
сопротивления. Для этого на систему (рис. 6.4) воздействуют переменной внешней силой
где Ω – частота вынуждающей силы.
Поведение системы описывается ДУ:
(6.6)
где Ω – частота вынуждающей силы.
Поведение системы описывается ДУ:
(6.6)
Установившиеся вынужденные колебания
Опыт показывает, что через некоторое время после начала
Установившиеся вынужденные колебания
Опыт показывает, что через некоторое время после начала
где A – амплитуда колебаний объекта массой m, α – сдвиг
где A – амплитуда колебаний объекта массой m, α – сдвиг
Чтобы найти A и α, подставим решение (6.7) в ур-е (6.6):
Чтобы найти A и α, подставим решение (6.7) в ур-е (6.6):
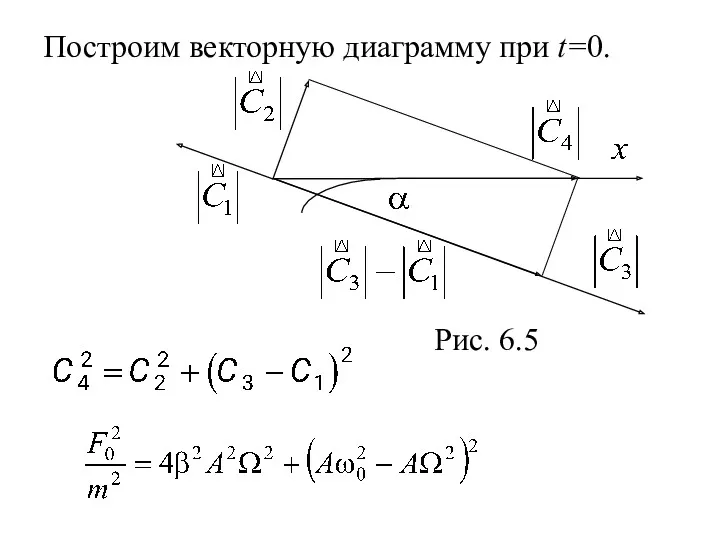
Рис. 6.5
Построим векторную диаграмму при t=0.
Рис. 6.5
Построим векторную диаграмму при t=0.
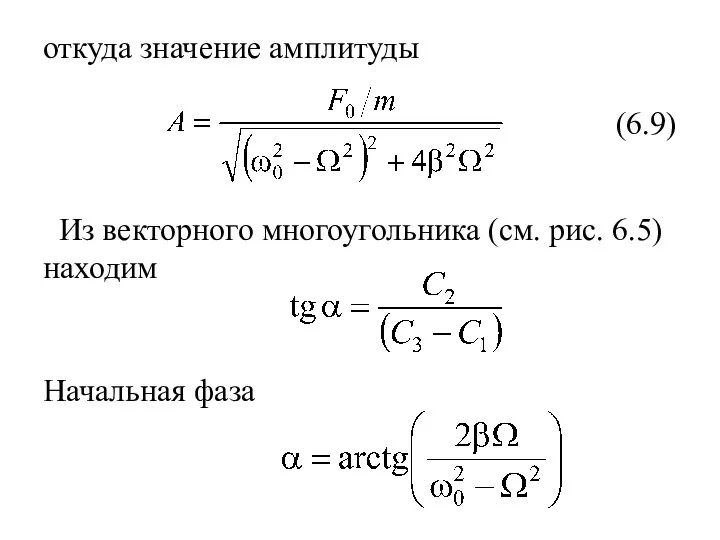
откуда значение амплитуды
(6.9)
Из векторного многоугольника (см. рис. 6.5) находим
откуда значение амплитуды
(6.9)
Из векторного многоугольника (см. рис. 6.5) находим
Механический резонанс
Резонанс – физическое явление, состоящее в резком возрастании амплитуды
Механический резонанс
Резонанс – физическое явление, состоящее в резком возрастании амплитуды
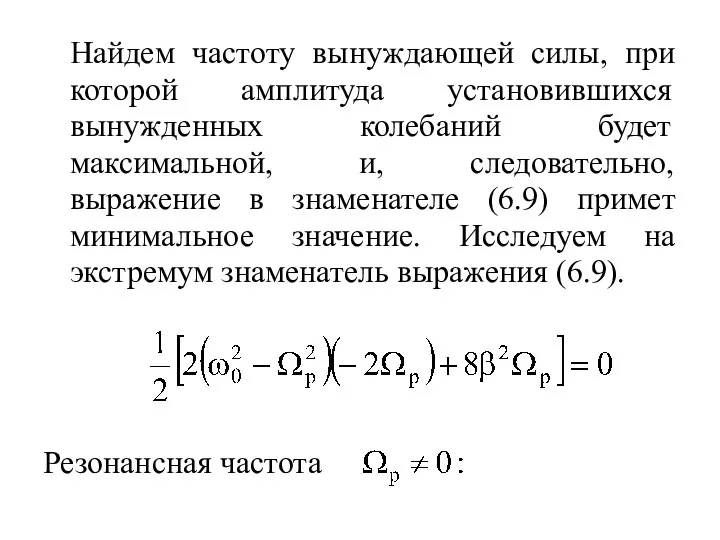
Найдем частоту вынуждающей силы, при которой амплитуда установившихся вынужденных колебаний будет
Найдем частоту вынуждающей силы, при которой амплитуда установившихся вынужденных колебаний будет
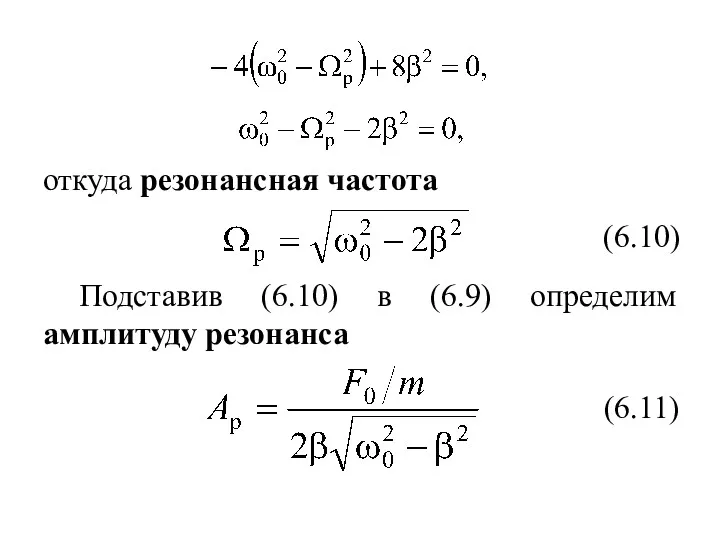
откуда резонансная частота
(6.10)
Подставив (6.10) в (6.9) определим амплитуду резонанса
(6.11)
откуда резонансная частота
(6.10)
Подставив (6.10) в (6.9) определим амплитуду резонанса
(6.11)
 Теплопередача
Теплопередача Масс – спектрометрия
Масс – спектрометрия Применение фотоэффекта. Давление света. Химическое действие света. Фотография
Применение фотоэффекта. Давление света. Химическое действие света. Фотография Маноматры. Автор Максимова Наталья Сергеевна
Маноматры. Автор Максимова Наталья Сергеевна Интерференция света
Интерференция света Магнитное поле и его графическое изображение. Неоднородное и однородное магнитное поле
Магнитное поле и его графическое изображение. Неоднородное и однородное магнитное поле Інерція та інертність. Маса та імпульс тіла. Другий закон Ньютона
Інерція та інертність. Маса та імпульс тіла. Другий закон Ньютона ПЛАН-КОНСПЕКТ УРОКА Электроскоп. Проводники и непроводники электричества физика 8класс
ПЛАН-КОНСПЕКТ УРОКА Электроскоп. Проводники и непроводники электричества физика 8класс Явление смачивания
Явление смачивания Материаловедение. Технология конструкционных материалов (лекция № 4). Пластическая деформация. Механические свойства металлов
Материаловедение. Технология конструкционных материалов (лекция № 4). Пластическая деформация. Механические свойства металлов Оптика – это раздел физики, в котором изучаются световые явления
Оптика – это раздел физики, в котором изучаются световые явления Механическое движение.
Механическое движение. Основы теории цепей
Основы теории цепей Теплообменные процессы
Теплообменные процессы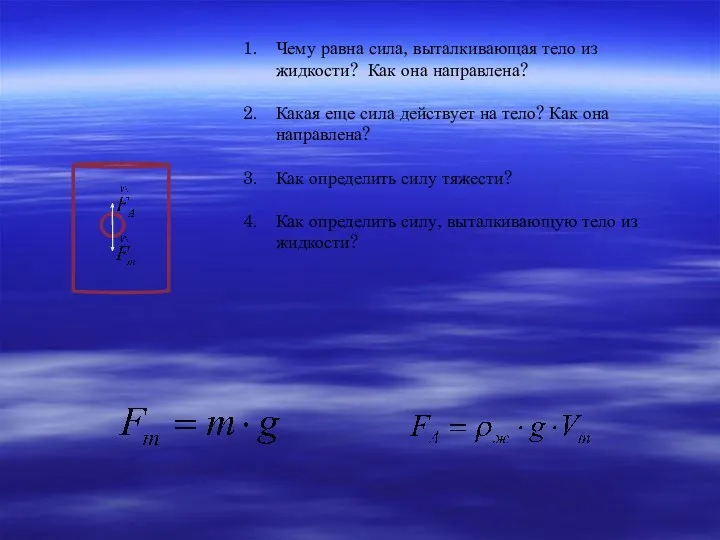 Урок и презентация по теме Плавание тел 7 класс
Урок и презентация по теме Плавание тел 7 класс 8Последовательное и параллельное соединение проводников
8Последовательное и параллельное соединение проводников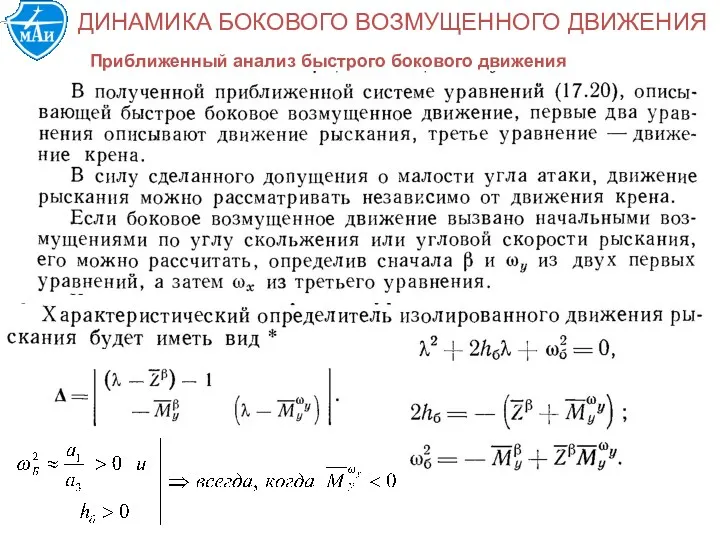 Динамика бокового возмущенного движения
Динамика бокового возмущенного движения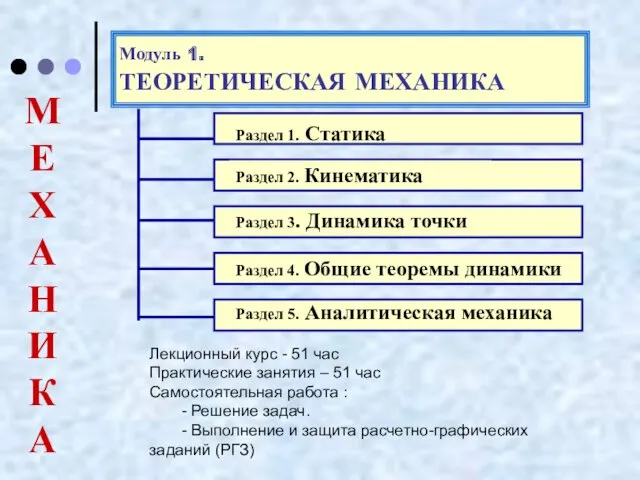 Теоретическая механика. Модуль 1
Теоретическая механика. Модуль 1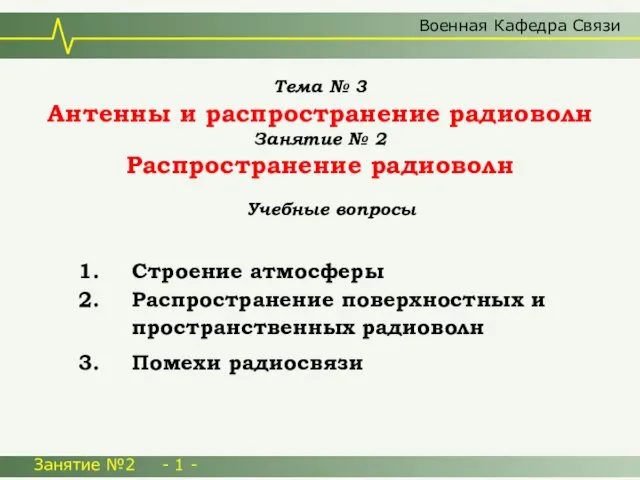 Антенны и распространение радиоволн
Антенны и распространение радиоволн Инфракрасная Фурье - спектроскопия
Инфракрасная Фурье - спектроскопия Презентация к уроку Сила упругости 7 класс
Презентация к уроку Сила упругости 7 класс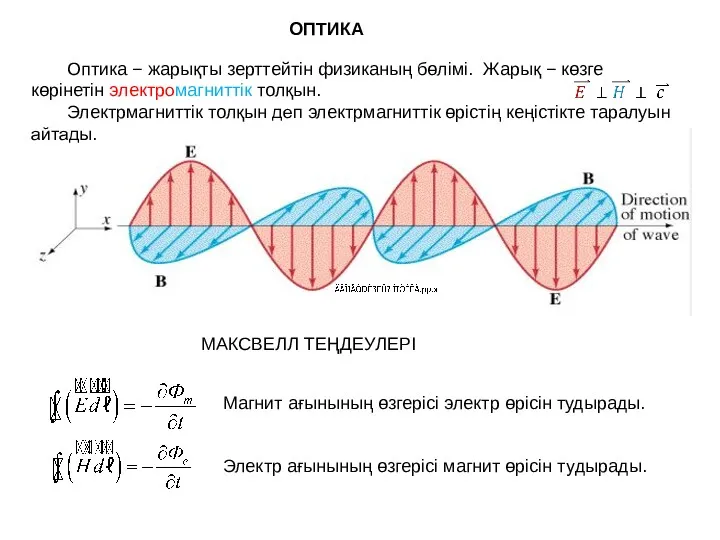 Оптика − жарықты зерттейтін физиканың бөлімі
Оптика − жарықты зерттейтін физиканың бөлімі Тепловые явления. Решение задач
Тепловые явления. Решение задач Электрический ток в металлах
Электрический ток в металлах Электродинамика
Электродинамика Машиноведение. История создания швейной машины. Классификация швейных машин
Машиноведение. История создания швейной машины. Классификация швейных машин Агрегатные состояния вещества. Плавление и отвердевание кристаллических тел
Агрегатные состояния вещества. Плавление и отвердевание кристаллических тел Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение