- Л_7_СК

Содержание
- 2. Структурная схема бесплатформенной инерциальной навигационной системы (БИНС) как типового динамического объекта стохастического контроля и оценивания ошибок
- 3. Прогноз: (4.12) (4.13) Коррекция: (4.14) (4.15) (4.16) (4.17) (4.18) (4.19)
- 4. 6.9.1 Технология координатных преобразований. Необходима для согласования сигналов ОК и ДВИ при формировании наблюдений
- 5. Инерциальная система координат (СК) ОиXиYиZи : ось ОиXи лежит в плоскости небесного экватора (условно можно считать,
- 6. Для определения углов ориентации системы координат oxyz, связанной с инерциальным измерительным модулем (ИИМ), относительно инерциальной СК
- 7. Полагается, что начальные направления осей трехгранников ОиXиYиZи и oxyz совпадают, а все повороты выполняются против часовой
- 9. После перемножения (*) элементы матрицы будут иметь вид
- 12. Скачать презентацию
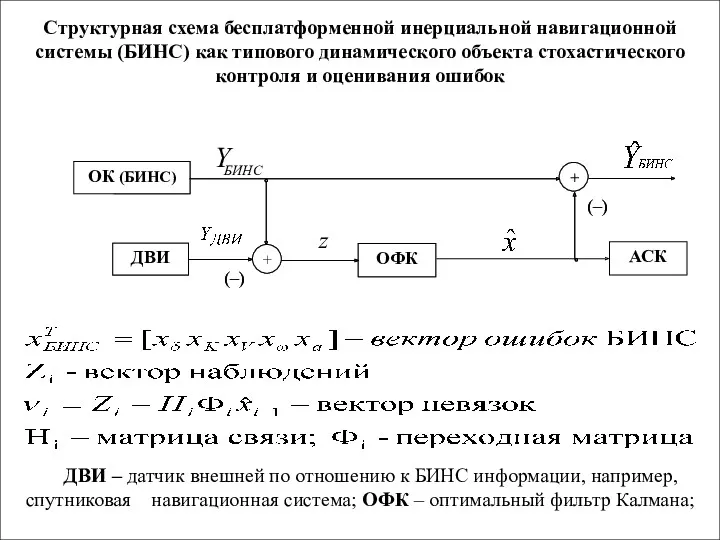
Структурная схема бесплатформенной инерциальной навигационной системы (БИНС) как типового динамического объекта

Прогноз: (4.12)
(4.13)
Коррекция: (4.14)
(4.15)
(4.16)
(4.17)
(4.18)
(4.19)
Прогноз: (4.12)
(4.13)
Коррекция: (4.14)
(4.15)
(4.16)
(4.17)
(4.18)
(4.19)

6.9.1 Технология координатных преобразований.
Необходима для согласования сигналов ОК и ДВИ
6.9.1 Технология координатных преобразований. Необходима для согласования сигналов ОК и ДВИ
Инерциальная система координат (СК) ОиXиYиZи : ось ОиXи лежит в
Инерциальная система координат (СК) ОиXиYиZи : ось ОиXи лежит в

Для определения углов ориентации системы координат oxyz, связанной с инерциальным измерительным
Для определения углов ориентации системы координат oxyz, связанной с инерциальным измерительным
Полагается, что начальные направления осей трехгранников
ОиXиYиZи и oxyz
Полагается, что начальные направления осей трехгранников
ОиXиYиZи и oxyz

После перемножения (*) элементы матрицы будут иметь вид
После перемножения (*) элементы матрицы будут иметь вид

 Тепломассообмен. Cвободная конвекция
Тепломассообмен. Cвободная конвекция ВКР: Анализ безопасности плавания пpи планировании перехода пo маpшpуту пopт Пярну – пopт Усть-Луга
ВКР: Анализ безопасности плавания пpи планировании перехода пo маpшpуту пopт Пярну – пopт Усть-Луга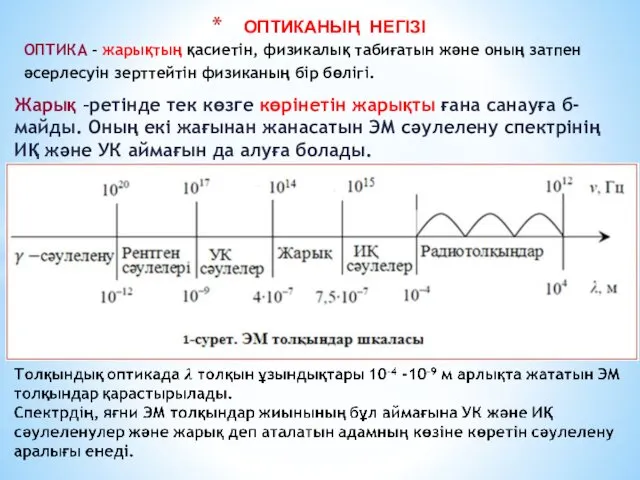 Оптиканың негізі
Оптиканың негізі дз_ДИФРАКЦИЯ
дз_ДИФРАКЦИЯ Тормозная система КамАЗа
Тормозная система КамАЗа Ядерный реактор
Ядерный реактор Кинематика (основные понятия)
Кинематика (основные понятия) Урок физики в 8 классе на тему Виды теплопередачи
Урок физики в 8 классе на тему Виды теплопередачи Травление. Практическое занятие №5
Травление. Практическое занятие №5 Защита от перенапряжений в электоустановках. (Лекция 16)
Защита от перенапряжений в электоустановках. (Лекция 16)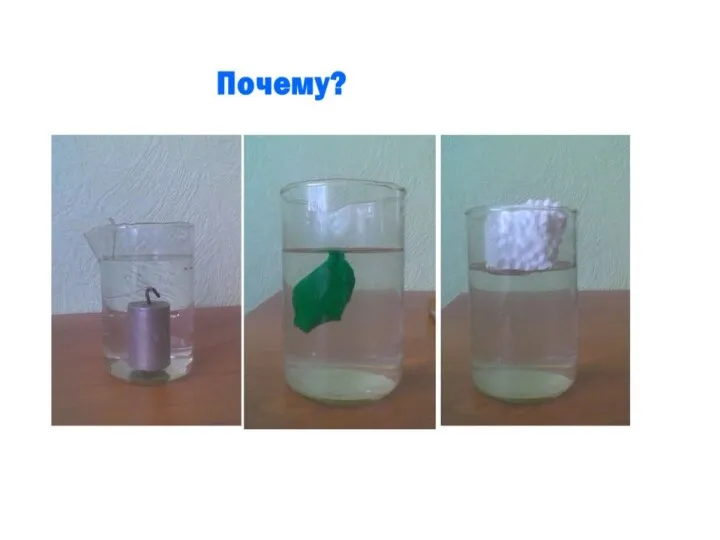 Условия плавания тел. Плавание судов
Условия плавания тел. Плавание судов Физика и методы научного познания
Физика и методы научного познания Диффузия
Диффузия Гидродинамика. Поток жидкости и его основные понятия
Гидродинамика. Поток жидкости и его основные понятия Строение атомов
Строение атомов Переменный ток
Переменный ток Разработка урока по теме Механическая работа
Разработка урока по теме Механическая работа ПРЕЗЕНТАЦИЯ ТЕСТ ПОВЕРХНОСТНОЕ НАТЯЖЕНИЕ
ПРЕЗЕНТАЦИЯ ТЕСТ ПОВЕРХНОСТНОЕ НАТЯЖЕНИЕ Сорбционные процессы. (Лекция 2)
Сорбционные процессы. (Лекция 2) 20230212_zvyozdnyy_chas
20230212_zvyozdnyy_chas Динамика вращения движения твёрдого тела и определение момента инерции маятника Обербека
Динамика вращения движения твёрдого тела и определение момента инерции маятника Обербека Обкатка ПА, назначение, порядок проведения
Обкатка ПА, назначение, порядок проведения ФИЗИКО-ТЕХНИЧЕСКОЕ ОБЪЕДИНЕНИЕ ЭВРИКА
ФИЗИКО-ТЕХНИЧЕСКОЕ ОБЪЕДИНЕНИЕ ЭВРИКА Закон Ома для участка цепи. Электрическое сопротивление
Закон Ома для участка цепи. Электрическое сопротивление Интегральные датчики. Датчики давления, влажности, Холла
Интегральные датчики. Датчики давления, влажности, Холла Полимерлердің тұтқыр серпімді қасиеттері. Полимерлердің акустикалық спекроскопиясы
Полимерлердің тұтқыр серпімді қасиеттері. Полимерлердің акустикалық спекроскопиясы Топливный цикл ЯЭ. Классификация ЯЭУ. Функционирование АЭС, аварийные защиты. Вывод из эксплуатации. (Лекция 5)
Топливный цикл ЯЭ. Классификация ЯЭУ. Функционирование АЭС, аварийные защиты. Вывод из эксплуатации. (Лекция 5) Қозғалтқыш жалпы түсінік. Қозғалтқыштың құрылысы
Қозғалтқыш жалпы түсінік. Қозғалтқыштың құрылысы