- Лекция 1. Общие принципы построения электропривода

Содержание
- 2. Литература Н.Ф. Ильинский «Основы электропривода» Н.Ф. Ильинский, В.Ф. Козаченко «Общий курс электропривода» В.В. Москаленко «Электрический привод»
- 3. Лекция 1. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДА 1.Электропривод как система. Структурная схема современного электропривода
- 4. Рис. 1.1. Структурная схема автоматизированного электропривода
- 5. ЭП - электрический преобразователь; ЭМП - электромеханический преобраз-тель; РД – ротор двигателя; МП - механический преобразователь;
- 6. Электропривод имеет два канала - силовой и информационный. Силовой обеспечивает преобразование электрической энергии, поступающей из системы
- 7. Электрический преобразователь энергии (ЭП) преобразует энергию сети в энергию, подаваемую на двигатель. Электромеханический преобразователь (ЭМП) (двигатель)
- 8. Информационный канал включает в себя автоматизированную систему управления (АСУ), датчики и преобразователи информации (ДПИ), задающие устройства
- 9. В соответствии с ГОСТ, 16593-79 под ЭЛЕКТРОПРИВОДОМ понимается электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и
- 10. 2 .Классификация электроприводов Современная рабочая машина состоит из рабочего органа, передаточного механизма, двигателя и аппаратуры управления.
- 11. Для привода машин может использоваться сила человека (ручной и ножной привод), сила ветра и воды (водяной
- 12. ЭП классифицируется по признакам: По характеру движения По числу используемых двигателей По виду электрического силового преобразователя
- 13. По характеру движения ЭП: вращательного движения; поступательного движения. Скорость может быть регулируемой или нерегулируемой. Движение –
- 14. 2. По числу используемых двигателей: групповой, характеризующийся тем, что один двигатель приводит в движение несколько исполнительных
- 15. взаимосвязанный, представляющий собой два или несколько электрически или механически связанных между собой индивидуальных ЭП-в, работающих совместно
- 16. Если двигатели связаны механически и работают на общий вал, ЭП называется многодвигательным. Если двигатели связаны электрическими
- 17. 3. По виду электрического силового преобразователя двигатели делятся на питаемые от: управляемых и неуправляемых выпрямителей, преобразующих
- 18. импульсных преобразователей напряжения постоянного тока с различным видом модуляции выходного напряжения постоянного тока.
- 19. 4. По способу соединения двигателя с рабочим органом: редукторный; безредукторный; конструктивно интегрированный.
- 20. 5. По степени регулируемости: нерегулируемый; регулируемый. 6. По основному регулируемому параметру: регулируемый по скорости; регулируемый по
- 21. 7. По виду управления: с ручным управлением; с полуавтоматическим управлением; с замкнутой системой автоматического регулирования (САР)
- 22. По типу эл.двигателя Эпр.с дв.ПТ Эпр. с дв.пер.тока
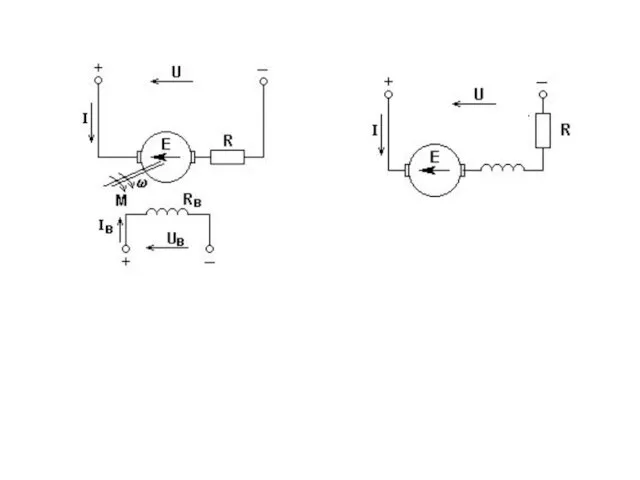
- 23. 4 вида ЭП ПТ Все электроприводы постоянного тока в зависимости от способа возбуждения двигателя можно разделить
- 25. Двигатели пер .тока АД (с КЗР, с ФР) СД
- 26. 3. Общие требования к ЭПР Рассмотрим главные показатели качества, которые определяют общие требования к электроприводу производственных
- 27. Надежность Свойство электропривода выполнять заданные функции в соответствии с требованиями технических условий в течение определенного промежутка
- 28. ТОЧНОСТЬ Это свойство электропривода обеспечивать в допустимых пределах погрешности расположения и движения ведомых звеньев при определенных
- 29. БЫСТРОДЕЙСТВИЕ Способность электропривода реагировать на изменение задающего или возмущающего воздействия. Это свойство электропривода связано с качеством
- 30. ЭНЕРГЕТИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ЭЛЕКТРОПРИВОДА часто оценивается коэффициентом полезного действия - отношением полезно истраченной энергии к ее полному
- 32. Скачать презентацию
Литература
Н.Ф. Ильинский «Основы электропривода»
Н.Ф. Ильинский, В.Ф. Козаченко «Общий курс электропривода»
В.В. Москаленко
Литература
Н.Ф. Ильинский «Основы электропривода»
Н.Ф. Ильинский, В.Ф. Козаченко «Общий курс электропривода»
В.В. Москаленко
Лекция 1. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДА
1.Электропривод как система. Структурная схема современного
Лекция 1. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ЭЛЕКТРОПРИВОДА
1.Электропривод как система. Структурная схема современного
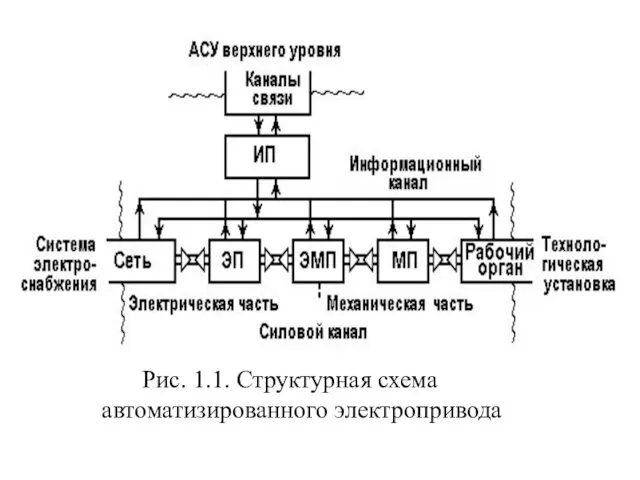
Рис. 1.1. Структурная схема автоматизированного электропривода
Рис. 1.1. Структурная схема автоматизированного электропривода
ЭП - электрический преобразователь;
ЭМП - электромеханический преобраз-тель;
РД – ротор двигателя;
МП -
ЭП - электрический преобразователь;
ЭМП - электромеханический преобраз-тель;
РД – ротор двигателя;
МП -
Электропривод имеет два канала - силовой и информационный.
Силовой обеспечивает преобразование
Электропривод имеет два канала - силовой и информационный.
Силовой обеспечивает преобразование
Электрический преобразователь энергии (ЭП) преобразует энергию сети в энергию, подаваемую на
Электрический преобразователь энергии (ЭП) преобразует энергию сети в энергию, подаваемую на
Информационный канал включает в себя автоматизированную систему управления (АСУ), датчики и
Информационный канал включает в себя автоматизированную систему управления (АСУ), датчики и
В соответствии с ГОСТ, 16593-79
под ЭЛЕКТРОПРИВОДОМ понимается электромеханическая система, состоящая
В соответствии с ГОСТ, 16593-79
под ЭЛЕКТРОПРИВОДОМ понимается электромеханическая система, состоящая
2 .Классификация электроприводов
Современная рабочая машина состоит из рабочего органа, передаточного механизма,
2 .Классификация электроприводов
Современная рабочая машина состоит из рабочего органа, передаточного механизма,
Для привода машин может использоваться сила человека (ручной и ножной привод),
Для привода машин может использоваться сила человека (ручной и ножной привод),
ЭП классифицируется по признакам:
По характеру движения
По числу используемых двигателей
По виду электрического
ЭП классифицируется по признакам:
По характеру движения
По числу используемых двигателей
По виду электрического
По характеру движения ЭП:
вращательного движения;
поступательного движения.
Скорость может быть регулируемой или нерегулируемой.
По характеру движения ЭП:
вращательного движения;
поступательного движения.
Скорость может быть регулируемой или нерегулируемой.
2. По числу используемых двигателей:
групповой, характеризующийся тем, что один двигатель приводит
2. По числу используемых двигателей:
групповой, характеризующийся тем, что один двигатель приводит
взаимосвязанный, представляющий собой два или несколько электрически или механически связанных между
взаимосвязанный, представляющий собой два или несколько электрически или механически связанных между
Если двигатели связаны механически и работают на общий вал, ЭП называется
Если двигатели связаны механически и работают на общий вал, ЭП называется
3. По виду электрического силового преобразователя двигатели делятся на питаемые от:
управляемых
3. По виду электрического силового преобразователя двигатели делятся на питаемые от:
управляемых
импульсных преобразователей напряжения постоянного тока с различным видом модуляции выходного напряжения
импульсных преобразователей напряжения постоянного тока с различным видом модуляции выходного напряжения
4. По способу соединения двигателя с рабочим органом:
редукторный;
безредукторный;
конструктивно интегрированный.
4. По способу соединения двигателя с рабочим органом:
редукторный;
безредукторный;
конструктивно интегрированный.
5. По степени регулируемости:
нерегулируемый;
регулируемый.
6. По основному регулируемому параметру:
регулируемый по скорости;
регулируемый
5. По степени регулируемости:
нерегулируемый;
регулируемый.
6. По основному регулируемому параметру:
регулируемый по скорости;
регулируемый
7. По виду управления:
с ручным управлением;
с полуавтоматическим управлением;
с замкнутой системой
7. По виду управления:
с ручным управлением;
с полуавтоматическим управлением;
с замкнутой системой
По типу эл.двигателя
Эпр.с дв.ПТ
Эпр. с дв.пер.тока
По типу эл.двигателя
Эпр.с дв.ПТ
Эпр. с дв.пер.тока
4 вида ЭП ПТ
Все электроприводы постоянного тока в зависимости от способа
4 вида ЭП ПТ
Все электроприводы постоянного тока в зависимости от способа
Двигатели пер .тока
АД (с КЗР, с ФР)
СД
Двигатели пер .тока
АД (с КЗР, с ФР)
СД
3. Общие требования к ЭПР
Рассмотрим главные показатели качества,
которые определяют общие требования
3. Общие требования к ЭПР
Рассмотрим главные показатели качества,
которые определяют общие требования
Надежность
Свойство электропривода выполнять заданные функции в соответствии с требованиями технических условий
Надежность
Свойство электропривода выполнять заданные функции в соответствии с требованиями технических условий
ТОЧНОСТЬ
Это свойство электропривода обеспечивать в допустимых пределах погрешности расположения и движения
ТОЧНОСТЬ
Это свойство электропривода обеспечивать в допустимых пределах погрешности расположения и движения
БЫСТРОДЕЙСТВИЕ
Способность электропривода реагировать на изменение задающего или возмущающего воздействия. Это свойство
БЫСТРОДЕЙСТВИЕ
Способность электропривода реагировать на изменение задающего или возмущающего воздействия. Это свойство
ЭНЕРГЕТИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ЭЛЕКТРОПРИВОДА
часто оценивается коэффициентом полезного действия - отношением полезно истраченной
ЭНЕРГЕТИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ЭЛЕКТРОПРИВОДА
часто оценивается коэффициентом полезного действия - отношением полезно истраченной
 Расчет аппаратов на ветровую нагрузку
Расчет аппаратов на ветровую нагрузку Организация участка диагностики, технического обслуживания приборов системы питания легковых автомобилей на СТО
Организация участка диагностики, технического обслуживания приборов системы питания легковых автомобилей на СТО Теорія великого вибуху
Теорія великого вибуху Кинетика химических реакций. (Лекция 8)
Кинетика химических реакций. (Лекция 8) Презентация Физика в нашем доме
Презентация Физика в нашем доме Испарение и конденсация Урок в 8 классе
Испарение и конденсация Урок в 8 классе Производство сельхозтехники. Тракторный завод Финпром
Производство сельхозтехники. Тракторный завод Финпром Результаты ЕГЭ по физике в Самарской области 2022 г
Результаты ЕГЭ по физике в Самарской области 2022 г Организация технического обслуживания и ремонта автомобиля КамАЗ 6460
Организация технического обслуживания и ремонта автомобиля КамАЗ 6460 Момент імпульсу.Закон збереження момента імпульсу
Момент імпульсу.Закон збереження момента імпульсу Импульс материальной точки, системы материальных точек. Закон сохранения и изменения импульса
Импульс материальной точки, системы материальных точек. Закон сохранения и изменения импульса X-Ray Machine
X-Ray Machine Кривошипно-шатунный механизм
Кривошипно-шатунный механизм Конструкция автосцепного устройства
Конструкция автосцепного устройства Денелердің жылулық сәуле шығаруы. Тепловизорлар
Денелердің жылулық сәуле шығаруы. Тепловизорлар Көпжақтар және айналу денелері
Көпжақтар және айналу денелері Презентация Электрическое сопротивление проводников
Презентация Электрическое сопротивление проводников Линия тока. Струйка тока. Расход. Уравнение расхода
Линия тока. Струйка тока. Расход. Уравнение расхода Бинарный урок - конференция по физике и химии
Бинарный урок - конференция по физике и химии Кристаллические и аморфные тела
Кристаллические и аморфные тела Процессы формирования водородной плазмы в зоне резания
Процессы формирования водородной плазмы в зоне резания Холодильные и теплонасосные установки
Холодильные и теплонасосные установки pril1
pril1 Взаимодействие тел. Масса
Взаимодействие тел. Масса Эксплуатация, техобслуживание и диагностика неисправностей
Эксплуатация, техобслуживание и диагностика неисправностей Чему равна сила упругости?
Чему равна сила упругости? Сила трения
Сила трения Перспективная модель ОГЭ-2020 по физике
Перспективная модель ОГЭ-2020 по физике