- Маневренность (Управляемость корабля)

Содержание
- 2. Maneuverability / Маневренность Маневренность судна – способность судна быстро изменять направление и скорость движения. Количественно оценивается
- 3. ОБЩИЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ Маневрирование – изменение направления движения судна и его скорости с помощью руля,
- 4. Устойчивость на курсе и поворотливость находятся в противоречии друг с другом. Чем более устойчиво прямолинейное движение
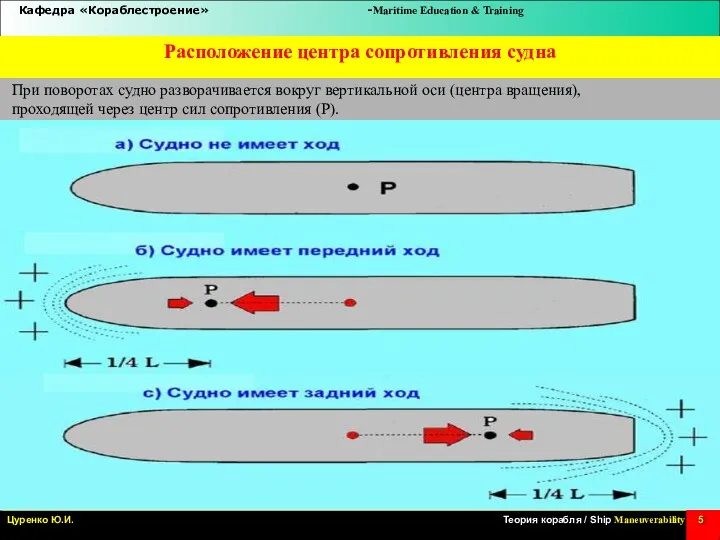
- 5. Расположение центра сопротивления судна При поворотах судно разворачивается вокруг вертикальной оси (центра вращения), проходящей через центр
- 6. Силы и моменты, действующие на судно. Все силы, действующие на судно, разделяются на три группы: •
- 7. Тяга винта и сопротивление движению судна. Чтобы судно двигалось с определенной скоростью, к нему необходимо приложить
- 8. Повторим терминологию \ Names of Ship’s Motion Rolling Pitching Heaving Yawing Swaying Surging with spring Without
- 9. Maneuverability / Маневренность Если ЦТ располагается впереди центра сил сопротивления, то судно устойчиво на курсе и,
- 10. Силы и моменты, действующие на судно.
- 11. Уравнения движения судна
- 12. Уравнения движения судна
- 14. Уравнения движения судна
- 15. В результате взаимодействия обтекающих масс воды и ветра на корпус, винт и руль даже при спокойном
- 16. МАНЕВРЕННЫЕ ХАРАКТЕРИСТИКИ СУДНА К основным маневренным характеристикам судна относятся: • скорость судна при выполнении маневра; •
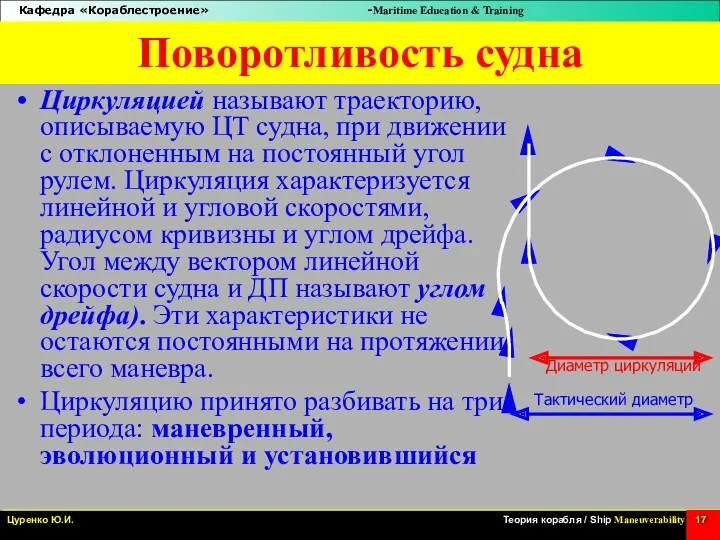
- 17. Поворотливость судна Циркуляцией называют траекторию, описываемую ЦТ судна, при движении с отклоненным на постоянный угол рулем.
- 18. Поворотливость судна Маневренный период – период, в течение которого происходит перекладка руля на определенный угол. С
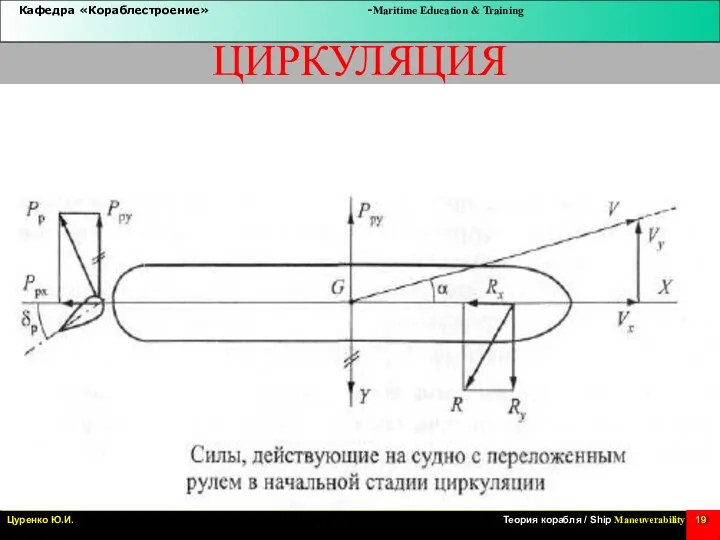
- 19. ЦИРКУЛЯЦИЯ
- 20. ЦИРКУЛЯЦИЯ
- 21. Эволюционный период – период, начинающийся с момента окончания перекладки руля и продолжающийся до момента окончания изменения
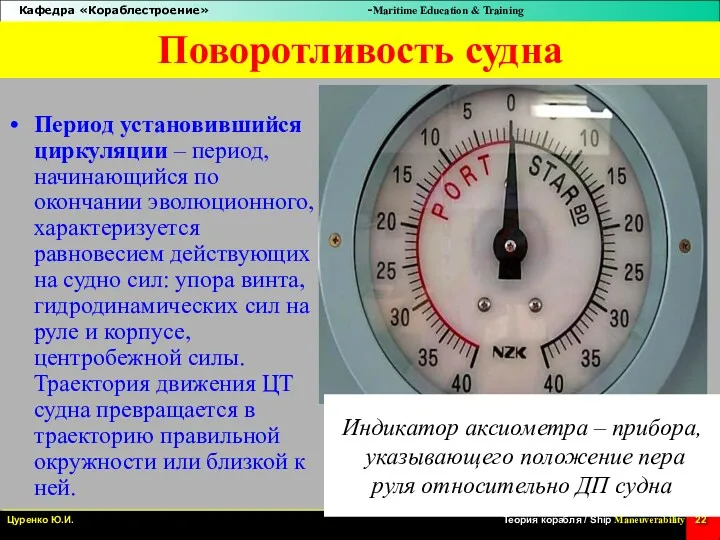
- 22. Поворотливость судна Период установившийся циркуляции – период, начинающийся по окончании эволюционного, характеризуется равновесием действующих на судно
- 23. Траектория судна на циркуляции Dо – диаметр установившейся циркуляции – расстояние между диаметральными плоскостями судна на
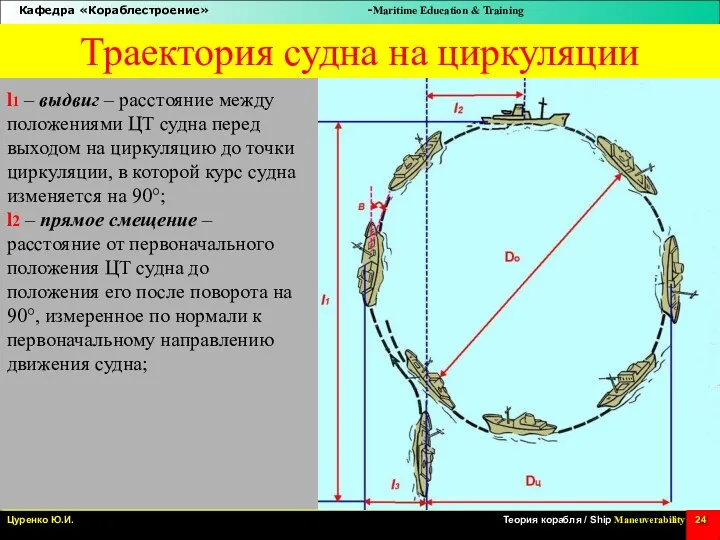
- 24. Траектория судна на циркуляции l1 – выдвиг – расстояние между положениями ЦТ судна перед выходом на
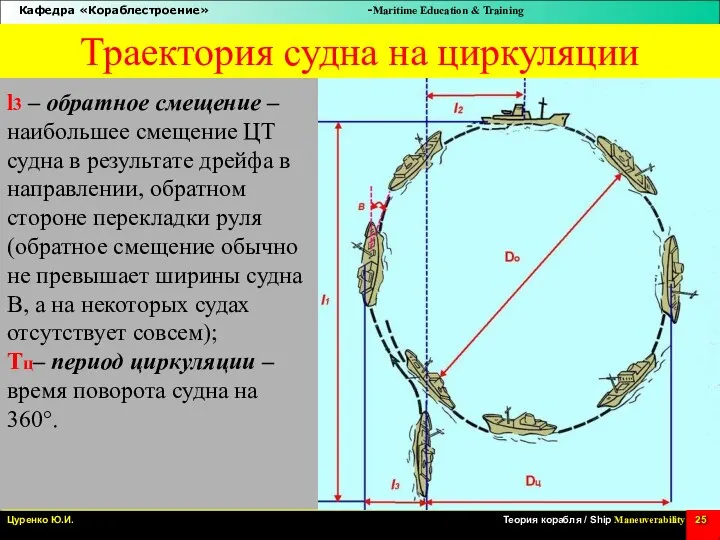
- 25. Траектория судна на циркуляции l3 – обратное смещение – наибольшее смещение ЦТ судна в результате дрейфа
- 26. Перечисленные выше характеристики циркуляции у морских транспортных судов среднего тоннажа при полной перекладке руля на борт
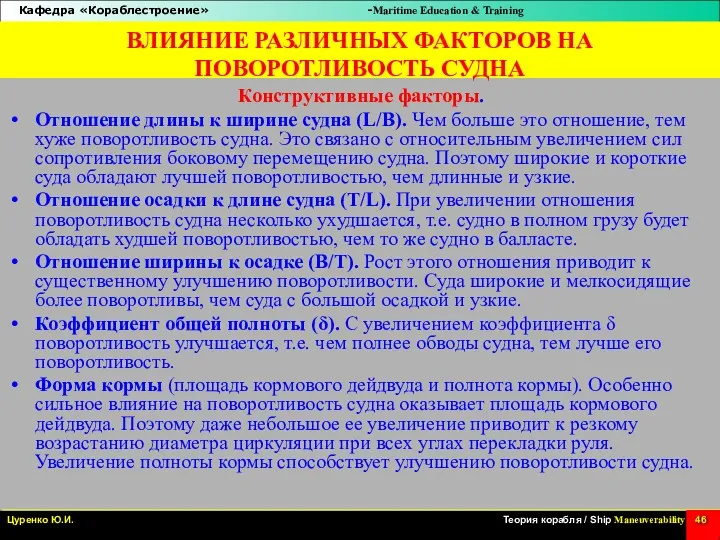
- 27. Влияние различных факторов на поворотливость судна Конструктивные факторы Отношение длины к ширине судна (L/B). Чем больше
- 28. Форма носовых образований судна значительно меньше влияет на поворотливость, чем форма кормы. Как правило, влияние формы
- 29. Инерционные свойства судна Путь и время маневра, связанного с неравномерным движением, называют инерционными характеристиками судна. Инерционные
- 30. Инерция судна и присоединенных масс воды. Равенство сил сопротивления среды движению судна и тяги винта определяет
- 31. Силы, действующие на судно при прямолинейном движении При отсутствии ветра и прямом положении руля первое дифференциальное
- 32. ИЗМЕНЕНИЕ СКОРОСТИ ДВИЖЕНИЯ СУДНА
- 33. РЕВЕРСИРОВАНИЕ ДВС-ВФШ
- 34. РЕВЕРСИРОВАНИЕ ТЗА-ВФШ
- 35. РЕВЕРСИРОВАНИЕ ГЭД-ВФШ
- 36. РЕВЕРСИРОВАНИЕ ВРШ
- 37. ТОРМОЖЕНИЕ С ПОМОЩЬЮ ЯКОРЕЙ
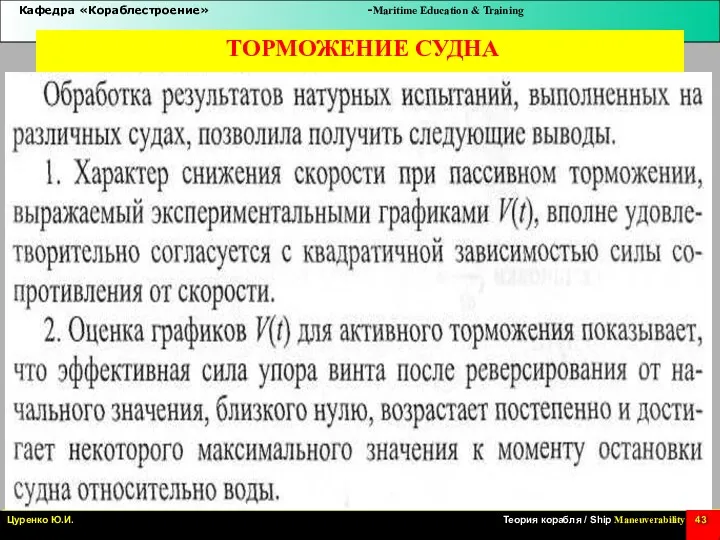
- 38. ТОРМОЖЕНИЕ СУДНА
- 39. ТОРМОЖЕНИЕ СУДНА
- 40. Свободное (Пассивное) торможение Двигатель работает до момента прекращения подачи топлива в цилиндры, затем двигатель останавливается, а
- 41. Активное торможение – это торможение при помощи реверсирования двигателя. Первоначально телеграф устанавливают в положение «Стоп», и
- 42. Активное торможение Инерционные характеристики судна при активном торможении
- 43. ТОРМОЖЕНИЕ СУДНА
- 44. Разгон судна Разгон судна осуществляется от нулевой скорости относительно воды до скорости, соответствующей заданному положению телеграфа.
- 45. Градация ходов Самый малый передний ход (Dead slow ahead) – минимальные устойчивые обороты, при которых двигатель
- 46. ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ПОВОРОТЛИВОСТЬ СУДНА Конструктивные факторы. Отношение длины к ширине судна (L/B). Чем больше
- 47. ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ПОВОРОТЛИВОСТЬ СУДНА Конструктивные факторы. Форма носовых образований судна значительно меньше влияет на
- 48. - Выбор площади руля определяется требованиями к высокой поворотливости для военных кораблей и требованиями экономичности для
- 49. Рули
- 50. Hull Поток Rudders Рули
- 51. Поток Rudders Рули
- 52. Силы на руле
- 53. Силы на руле
- 54. Подъёмная сила на крыле Подъёмная сила (Lift) – проекция равнодействующей сил трения и давления на перпендикуляр
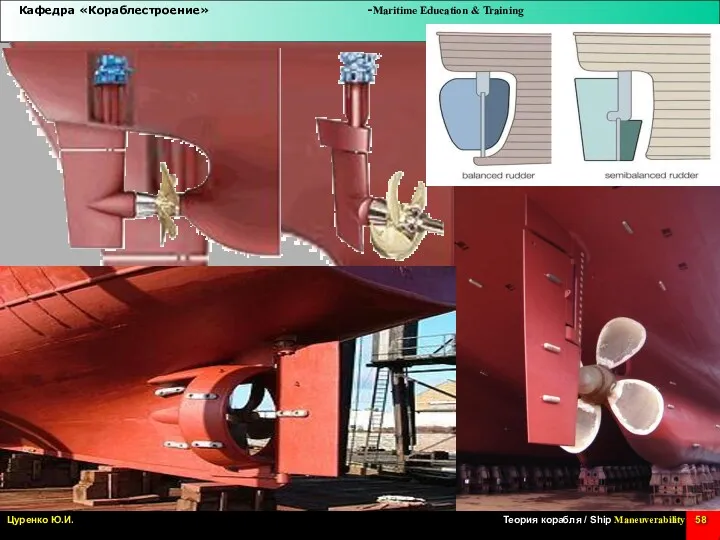
- 55. Балансирный руль \ Balanced Rudder Баллер руля проходит через центр давления, поэтому поворот руля требует минимальных
- 56. Небалансирный руль \ Unbalanced Rudder Баллер совпадает с передней кромкой руля Rudder Balance Типы рулей
- 57. Полубалансирный руль \ Semi Balanced Rudder Balance Типы рулей
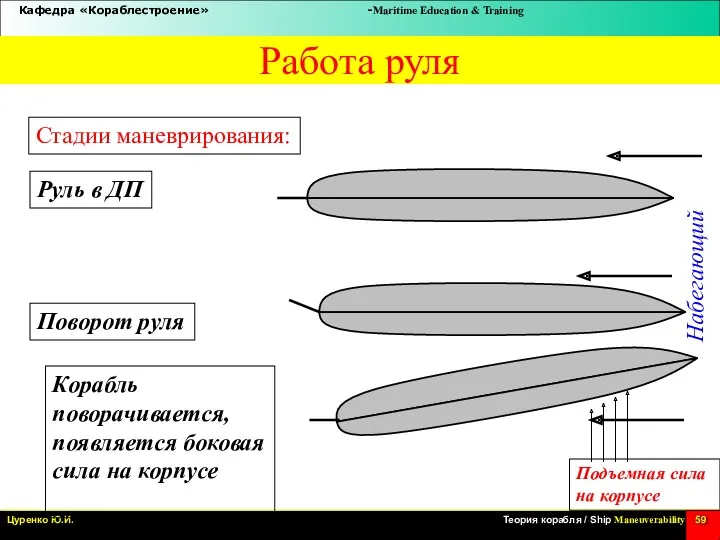
- 59. Стадии маневрирования: Набегающий поток Работа руля
- 60. - До некоторых углов поворота руль работает как крыло Около 45o руль перестает создавать подъемную силу
- 61. Углы перекладки ≤ ± 35 или угла максимума. Максимум подъемной силы Работа руля
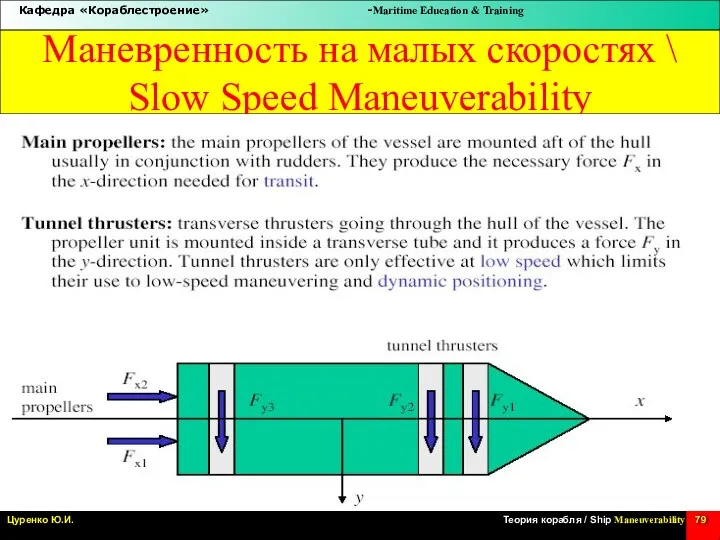
- 62. Маневренность на малых скоростях \ Slow Speed Maneuverability
- 63. Винторулевой комплекс морских судов, как правило, не обеспечивает их необходимую маневренность при движении на малых скоростях.
- 64. СРЕДСТВА АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ Активный руль. Роторный руль Руль Беккера-Ястрема. Фланкирующий руль. Руль Шиллинга. Двойные рули
- 65. АКТИВНЫЙ РУЛЬ Наиболее широко применяемым средством управления является руль, который может быть разной конструкции. В качестве
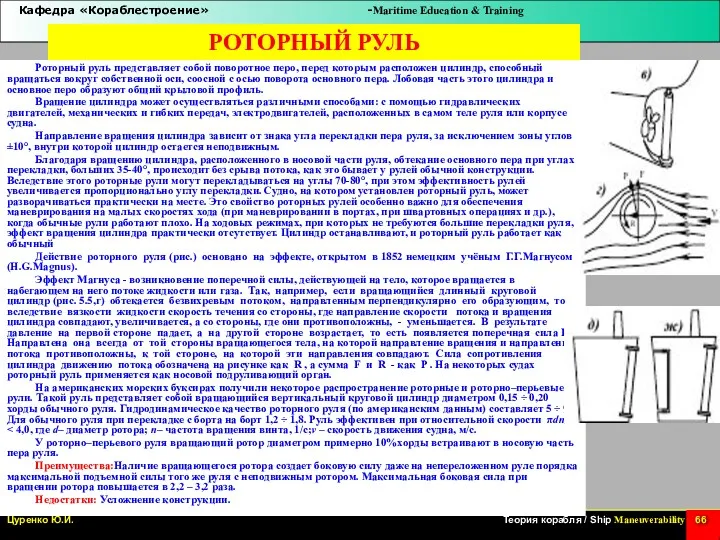
- 66. РОТОРНЫЙ РУЛЬ Роторный руль представляет собой поворотное перо, перед которым расположен цилиндр, способный вращаться вокруг собственной
- 67. Руль с закрылком на ППХ и ПСХ в большинстве случаев применяется без работы закрылка как обычный
- 68. Руль с закрылком компании Bekker Marine System
- 69. Сопоставление конструкции традиционного руля и эффективно работающего руля компании компании Wärtsilä. Efficiency rudder – эффективный руль
- 70. ФЛАНКИРУЮЩИЙ РУЛЬ Для обеспечения управляемости на заднем ходу толкачи оборудуются рулями заднего хода (так называемыми фланкирующими),
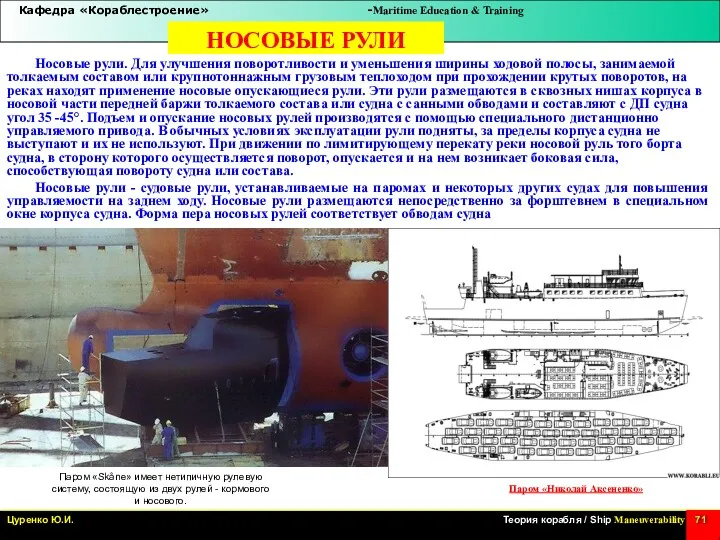
- 71. НОСОВЫЕ РУЛИ Носовые рули. Для улучшения поворотливости и уменьшения ширины ходовой полосы, занимаемой толкаемым составом или
- 72. РУЛЬ ШИЛЛИНГА Рули Шиллинга. Перо руля особой конфигурации, улучшающей условия обтекания его потоком воды, располагается за
- 73. Рули Шиллинга отличатся от обычных рулей формой профиля, для которой характерно наличие вогнутой поверхности пера руля
- 74. ДВОЙНЫЕ РУЛИ ШИЛЛИНГА Двойные рули Шиллинга. Два пера руля особой конфигурации, улучшающей условия обтекания их потоком
- 75. Раздельные поворотные насадки. Поворотная насадка – это стальное кольцо, профиль которого представляет элемент крыла. Площадь входного
- 76. На многих самоходных судах внутреннего плавания вместо рулей устанавливают поворотные насадки. Управление судном с помощью поворотных
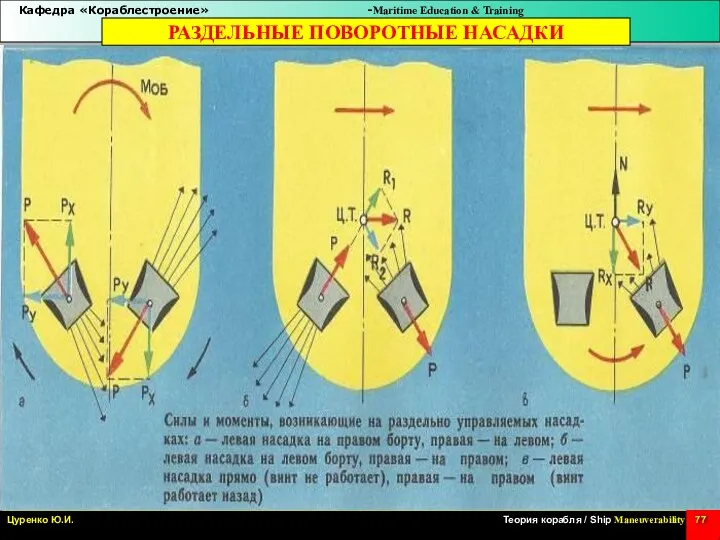
- 77. РАЗДЕЛЬНЫЕ ПОВОРОТНЫЕ НАСАДКИ
- 78. Тоннельное подруливающее устройство — судовое устройствосудовое устройство, предназначенное для активного управления судномсудовое устройство, предназначенное для активного
- 79. Маневренность на малых скоростях \ Slow Speed Maneuverability
- 80. ГЛАВНЫЕ ВИНТОРУЛЕВЫЕ КОЛОНКИ Последние годы отмечены поступлением на флот судов с принципиально новыми техническими решениями, отличающимися
- 81. В последнее время получила распространение электродвижущаяся система Azipod (Azimuth Pod – азимутальная гондола), которая включает в
- 82. Z-ОБРАЗНАЯ ПЕРЕДАЧА(угловая колонка) – Z-drive Z-образная передача (угловая колонка) — механическая передача (угловая колонка) — механическая
- 83. ВЫДВИЖНОЕ АЗИМУТАЛЬНОЕ ПОДРУЛИВАЮЩЕЕ УСТВОЙСТВО Выдвижное азимутальное подруливающее устройство — в судостроении гребной винт — в судостроении
- 84. Водомётный движитель (водомёт) — движитель (водомёт) — движитель, у которого сила, движущая судно (водомёт) — движитель,
- 85. Водомётный движитель, водомёт, - судовой движитель, у которого сила, движущая судно, создается выталкиваемой из него струей
- 86. Судовой крыльчатый движитель, известный также под названием движитель Фойта — Шнайдера (англ. Voith Schneider Propeller) —
- 87. Принцип действия крыльчатого движителя показан на рисунке. В процессе вращения диска каждая лопасть разворачивается перпендикулярно к
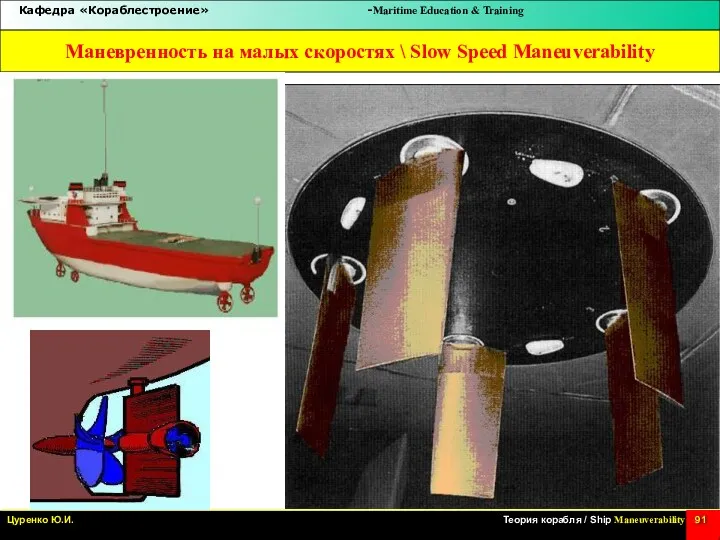
- 88. Крыльчатые движители. Они устанавливаются, как правило, на судах портофлота, повышают их маневренность,так как появляется возможность перемещаться
- 89. СИСТЕМА ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ Система Динамического Позиционирования это интегрированная система управления судном, спроектированная удерживать позицию и курс
- 90. Система динамического позиционирования — (англ. dynamic positioning system) — система, предназначенная для удержания судна в заданной
- 91. Маневренность на малых скоростях \ Slow Speed Maneuverability
- 93. Маневренность на малых скоростях \ Slow Speed Maneuverability
- 94. Маневренность на малых скоростях \ Slow Speed Maneuverability
- 95. Виды маневренных испытаний • IMO standard maneuvers (Стандартные тесты ИМО): – Zig-zag (Зиг-Заг) • 10º/ 10º
- 96. Маневр Зиг-Заг
- 97. Маневр Зиг-Заг Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на 10° поочередно на каждый борт
- 98. Маневр выхода на циркуляцию
- 99. Срочная остановка
- 100. ИНФОРМАЦИЯ О МАНЕВРЕННЫХ ХАРАКТЕРИСТИКАХ СУДНА Информация о маневренных характеристиках судна в соответствии с резолюцией ИМО А.601(15)
- 101. Лоцманская карточка. Лоцманская карточка, подлежащая заполнению капитаном, предназначена для предоставления информации лоцману, принимающему судно под проводку.
- 102. Таблица маневренных характеристик В таблицу маневренных характеристик для рулевой рубки должны быть включены следующие данные. 1.Название
- 103. Фрагмент таблицы маневренных характеристик
- 104. Формуляр маневренных элементов Формуляр маневренных элементов должен содержать достаточно подробное описание маневренных характеристик и другие соответствующие
- 106. Скачать презентацию
Maneuverability / Маневренность
Маневренность судна – способность судна быстро изменять направление и скорость
Maneuverability / Маневренность
Маневренность судна – способность судна быстро изменять направление и скорость
ОБЩИЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Маневрирование – изменение направления движения судна и его скорости
ОБЩИЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Маневрирование – изменение направления движения судна и его скорости
Устойчивость на курсе и поворотливость находятся в противоречии друг с другом.
Устойчивость на курсе и поворотливость находятся в противоречии друг с другом.
Расположение центра сопротивления судна
При поворотах судно разворачивается вокруг вертикальной оси (центра
Расположение центра сопротивления судна
При поворотах судно разворачивается вокруг вертикальной оси (центра
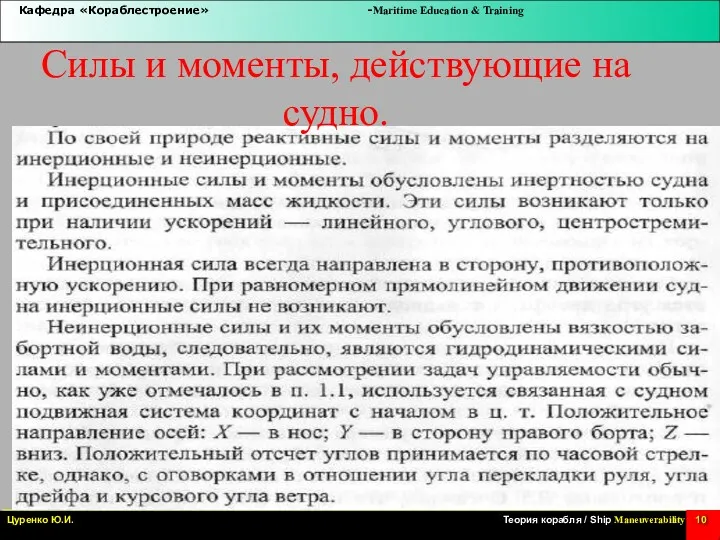
Силы и моменты, действующие на судно.
Все силы, действующие на судно,
Силы и моменты, действующие на судно.
Все силы, действующие на судно,
Тяга винта и сопротивление движению судна. Чтобы судно двигалось с определенной скоростью,
Тяга винта и сопротивление движению судна. Чтобы судно двигалось с определенной скоростью,
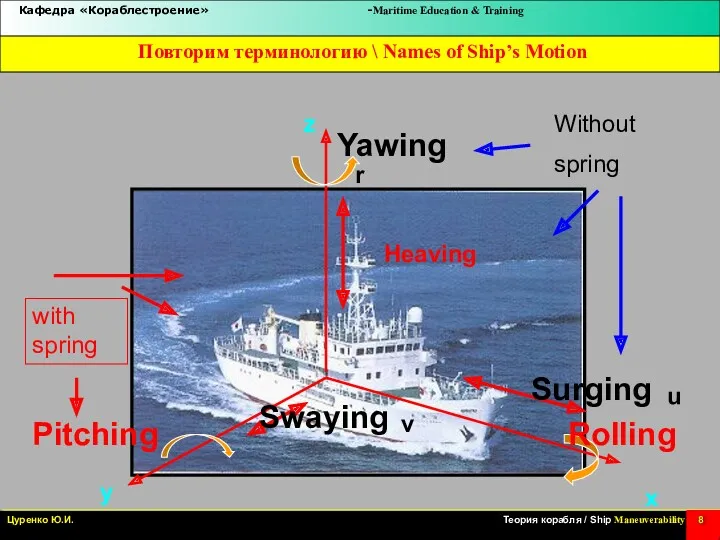
Повторим терминологию \ Names of Ship’s Motion
Rolling
Pitching
Heaving
Yawing
Swaying
Surging
with spring
Without
spring
x
z
y
r
u
v
Повторим терминологию \ Names of Ship’s Motion
Rolling
Pitching
Heaving
Yawing
Swaying
Surging
with spring
Without
spring
x
z
y
r
u
v
Maneuverability / Маневренность
Если ЦТ располагается впереди центра сил сопротивления, то судно
Maneuverability / Маневренность
Если ЦТ располагается впереди центра сил сопротивления, то судно
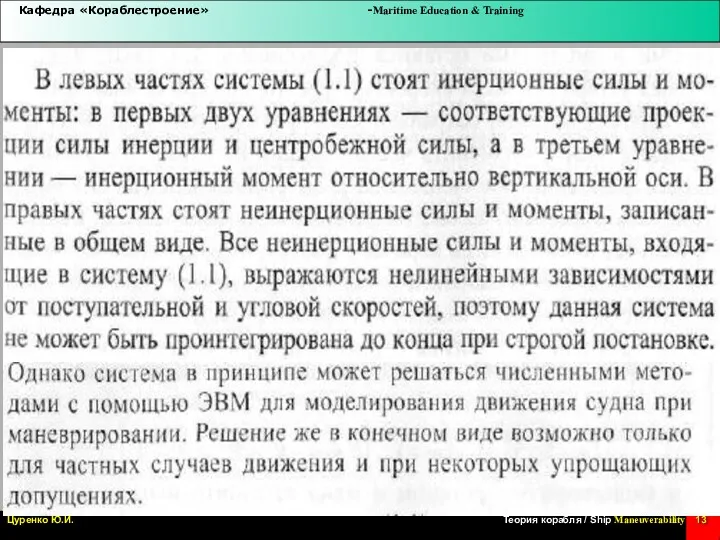
Силы и моменты, действующие на судно.
Силы и моменты, действующие на судно.

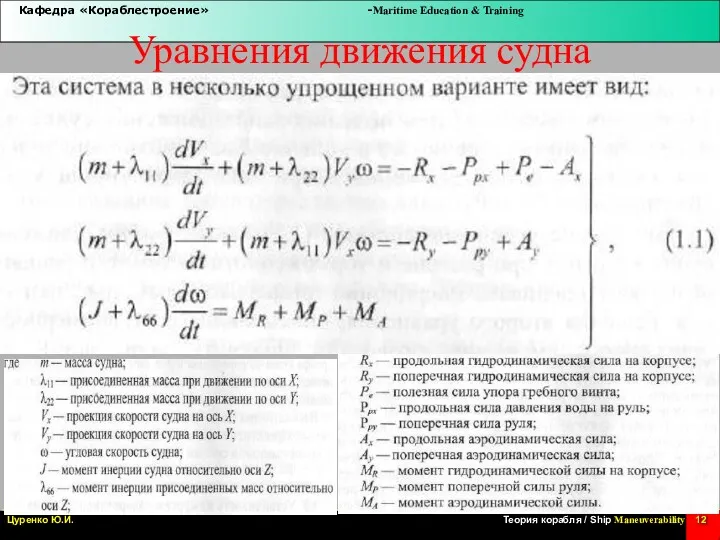
Уравнения движения судна
Уравнения движения судна
Уравнения движения судна
Уравнения движения судна

Уравнения движения судна
Уравнения движения судна
В результате взаимодействия обтекающих масс воды и
ветра на корпус, винт
В результате взаимодействия обтекающих масс воды и
ветра на корпус, винт
МАНЕВРЕННЫЕ ХАРАКТЕРИСТИКИ СУДНА
К основным маневренным характеристикам судна относятся:
• скорость судна при
МАНЕВРЕННЫЕ ХАРАКТЕРИСТИКИ СУДНА
К основным маневренным характеристикам судна относятся: • скорость судна при
Поворотливость судна
Циркуляцией называют траекторию, описываемую ЦТ судна, при движении с отклоненным
Поворотливость судна
Циркуляцией называют траекторию, описываемую ЦТ судна, при движении с отклоненным

Поворотливость судна
Маневренный период – период, в течение которого происходит перекладка руля
Поворотливость судна
Маневренный период – период, в течение которого происходит перекладка руля
ЦИРКУЛЯЦИЯ
ЦИРКУЛЯЦИЯ

ЦИРКУЛЯЦИЯ
ЦИРКУЛЯЦИЯ
Эволюционный период – период, начинающийся с момента окончания перекладки руля и продолжающийся
Эволюционный период – период, начинающийся с момента окончания перекладки руля и продолжающийся
Поворотливость судна
Период установившийся циркуляции – период, начинающийся по окончании эволюционного, характеризуется
Поворотливость судна
Период установившийся циркуляции – период, начинающийся по окончании эволюционного, характеризуется

Траектория судна на циркуляции
Dо – диаметр установившейся циркуляции – расстояние между диаметральными плоскостями
Траектория судна на циркуляции
Dо – диаметр установившейся циркуляции – расстояние между диаметральными плоскостями
Траектория судна на циркуляции
l1 – выдвиг – расстояние между положениями ЦТ судна перед
Траектория судна на циркуляции
l1 – выдвиг – расстояние между положениями ЦТ судна перед
Траектория судна на циркуляции
l3 – обратное смещение – наибольшее смещение ЦТ судна в
Траектория судна на циркуляции
l3 – обратное смещение – наибольшее смещение ЦТ судна в
Перечисленные выше характеристики циркуляции у морских транспортных судов среднего тоннажа при
Перечисленные выше характеристики циркуляции у морских транспортных судов среднего тоннажа при
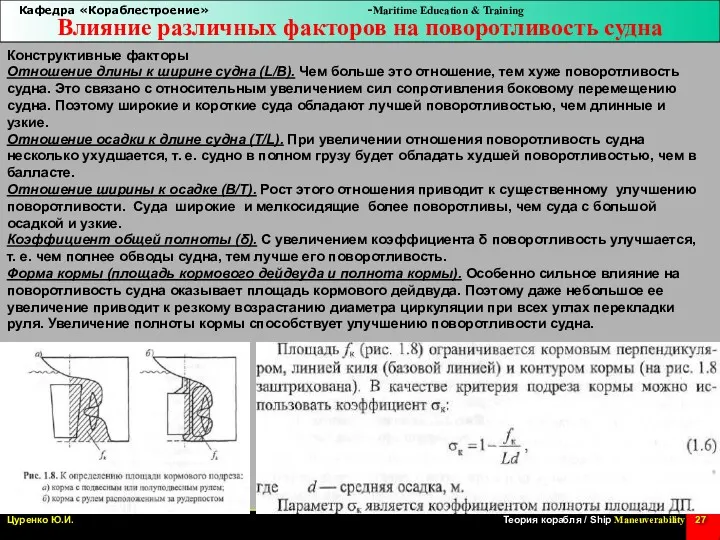
Влияние различных факторов на поворотливость судна
Конструктивные факторы
Отношение длины к ширине
Влияние различных факторов на поворотливость судна
Конструктивные факторы
Отношение длины к ширине
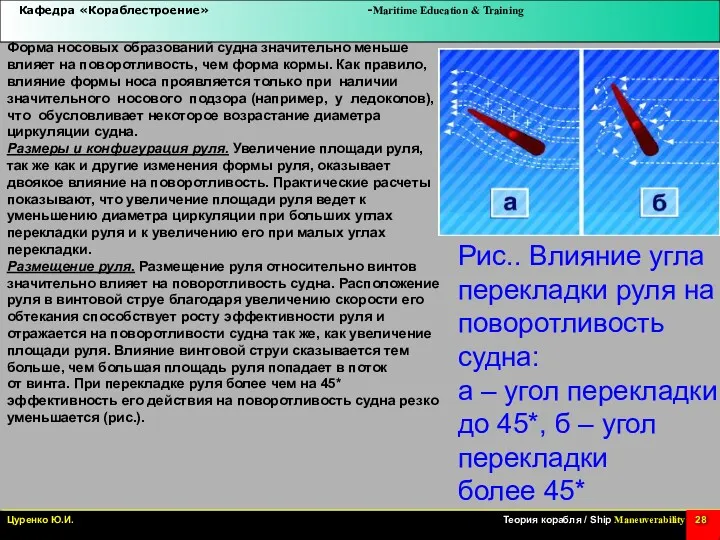
Форма носовых образований судна значительно меньше влияет на поворотливость, чем форма
Форма носовых образований судна значительно меньше влияет на поворотливость, чем форма
Инерционные свойства судна
Путь и время маневра, связанного с неравномерным движением,
Инерционные свойства судна
Путь и время маневра, связанного с неравномерным движением,

Инерция судна и присоединенных масс воды.
Равенство сил сопротивления среды движению судна
Инерция судна и присоединенных масс воды.
Равенство сил сопротивления среды движению судна
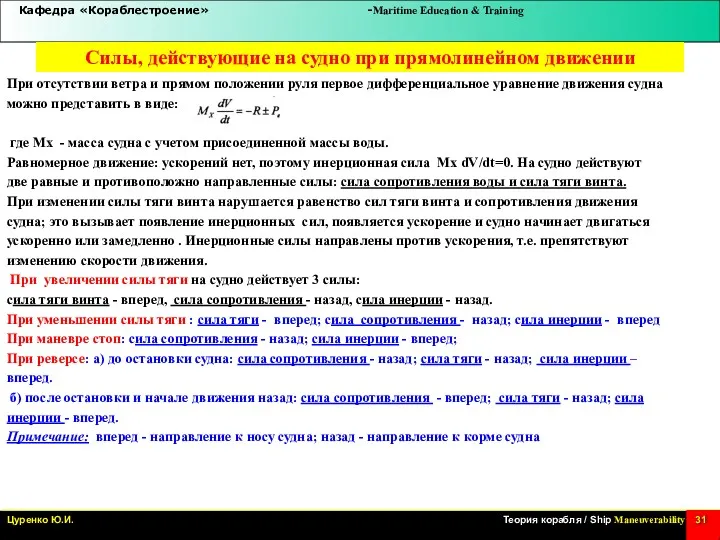
Силы, действующие на судно при прямолинейном движении
При отсутствии ветра и прямом
Силы, действующие на судно при прямолинейном движении
При отсутствии ветра и прямом
ИЗМЕНЕНИЕ СКОРОСТИ ДВИЖЕНИЯ СУДНА
ИЗМЕНЕНИЕ СКОРОСТИ ДВИЖЕНИЯ СУДНА
РЕВЕРСИРОВАНИЕ ДВС-ВФШ
РЕВЕРСИРОВАНИЕ ДВС-ВФШ
РЕВЕРСИРОВАНИЕ ТЗА-ВФШ
РЕВЕРСИРОВАНИЕ ТЗА-ВФШ
РЕВЕРСИРОВАНИЕ ГЭД-ВФШ
РЕВЕРСИРОВАНИЕ ГЭД-ВФШ
РЕВЕРСИРОВАНИЕ ВРШ
РЕВЕРСИРОВАНИЕ ВРШ
ТОРМОЖЕНИЕ С ПОМОЩЬЮ ЯКОРЕЙ
ТОРМОЖЕНИЕ С ПОМОЩЬЮ ЯКОРЕЙ
ТОРМОЖЕНИЕ СУДНА
ТОРМОЖЕНИЕ СУДНА
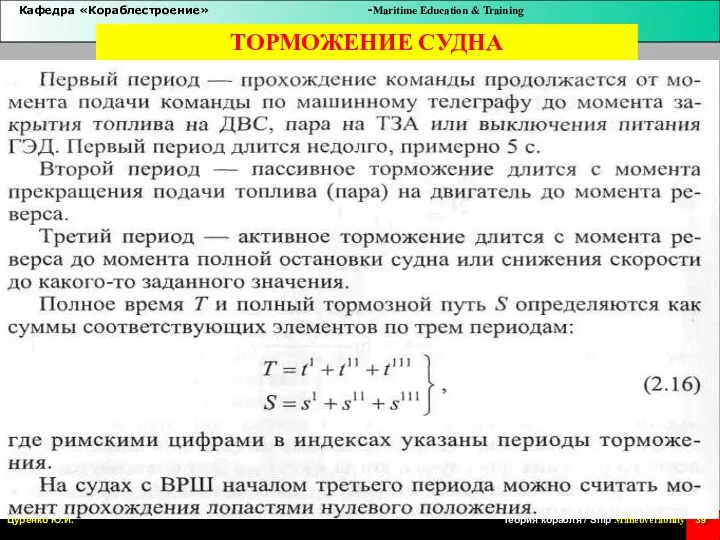
ТОРМОЖЕНИЕ СУДНА
ТОРМОЖЕНИЕ СУДНА

Свободное (Пассивное) торможение
Двигатель работает до момента прекращения подачи топлива в
Свободное (Пассивное) торможение
Двигатель работает до момента прекращения подачи топлива в
Активное торможение – это торможение при помощи реверсирования двигателя. Первоначально телеграф устанавливают
Активное торможение – это торможение при помощи реверсирования двигателя. Первоначально телеграф устанавливают
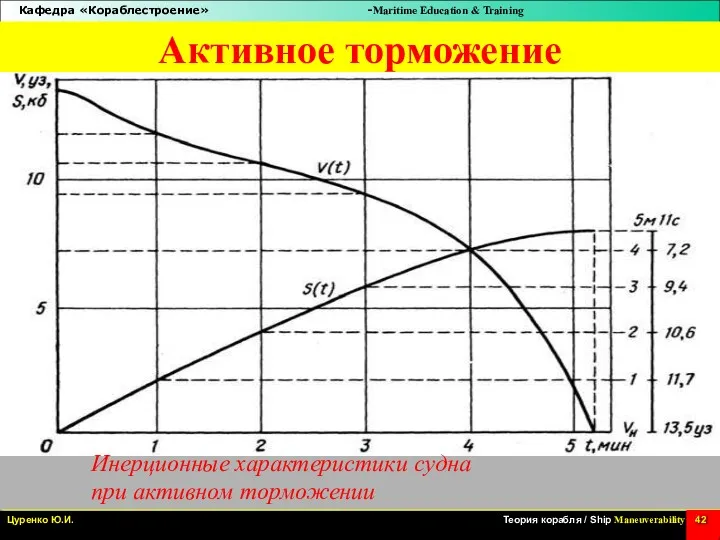
Активное торможение
Инерционные характеристики судна
при активном торможении
Активное торможение
Инерционные характеристики судна
при активном торможении
ТОРМОЖЕНИЕ СУДНА
ТОРМОЖЕНИЕ СУДНА

Разгон судна
Разгон судна осуществляется от нулевой скорости относительно воды до
Разгон судна
Разгон судна осуществляется от нулевой скорости относительно воды до
Градация ходов
Самый малый передний ход (Dead slow ahead) – минимальные устойчивые
Градация ходов
Самый малый передний ход (Dead slow ahead) – минимальные устойчивые
ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ПОВОРОТЛИВОСТЬ СУДНА
Конструктивные факторы.
Отношение длины к ширине судна
ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ПОВОРОТЛИВОСТЬ СУДНА
Конструктивные факторы.
Отношение длины к ширине судна

ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ПОВОРОТЛИВОСТЬ СУДНА
Конструктивные факторы.
Форма носовых образований судна значительно меньше
ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ НА ПОВОРОТЛИВОСТЬ СУДНА
Конструктивные факторы.
Форма носовых образований судна значительно меньше
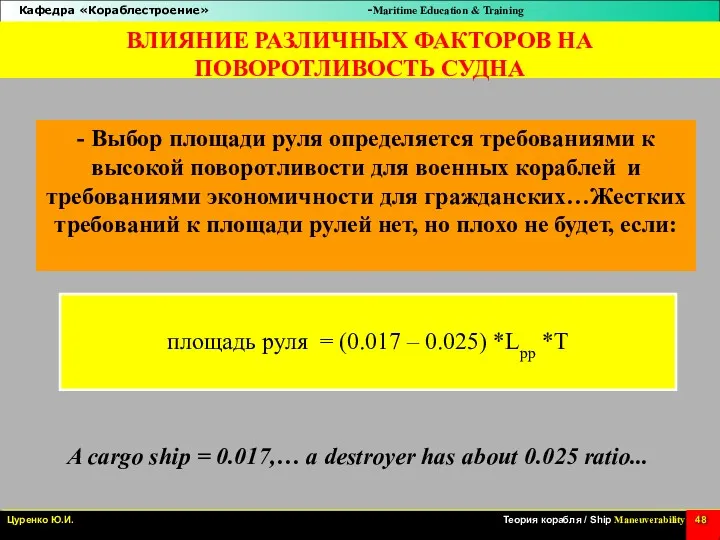
- Выбор площади руля определяется требованиями к высокой поворотливости для военных
- Выбор площади руля определяется требованиями к высокой поворотливости для военных
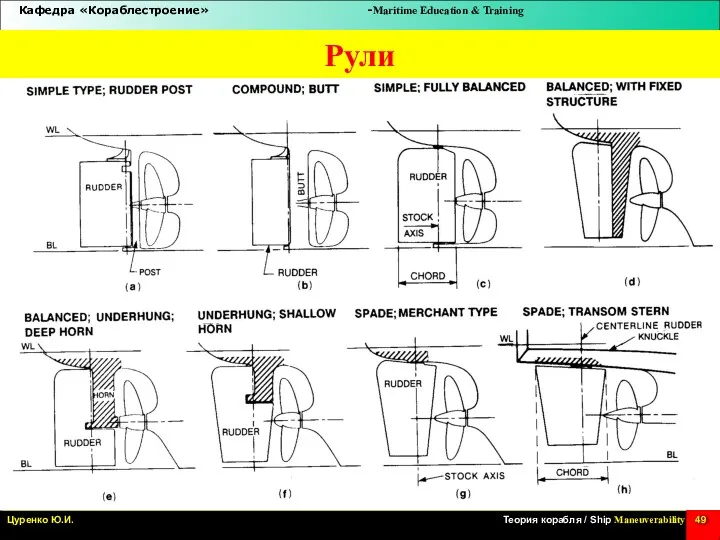
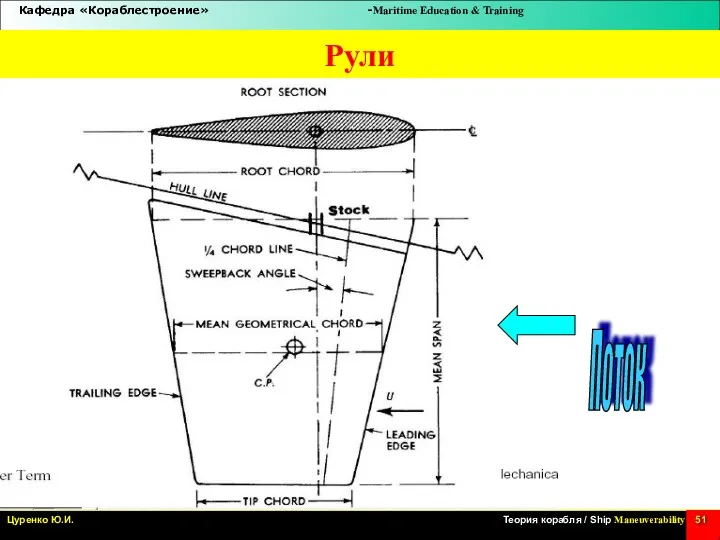
Рули
Рули
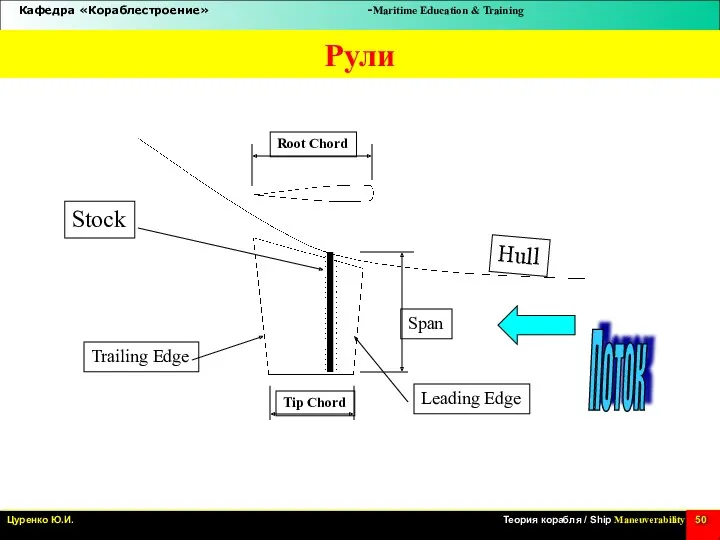
Hull
Поток
Rudders
Рули
Hull
Поток
Rudders
Рули
Поток
Rudders
Рули
Поток
Rudders
Рули
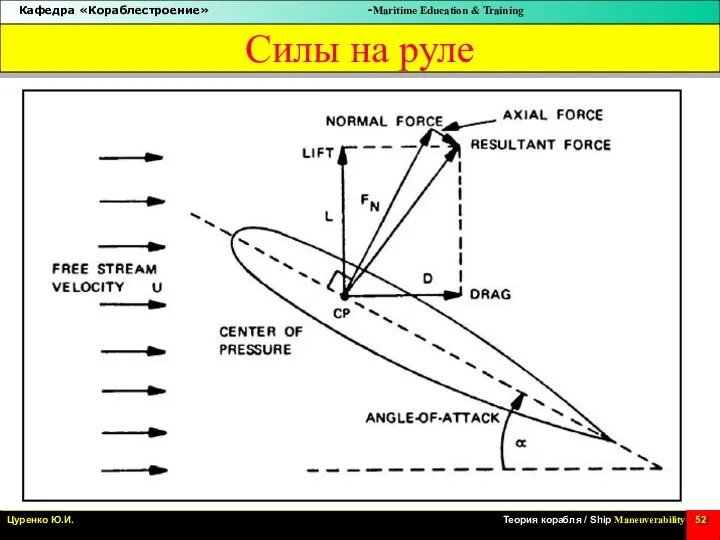
Силы на руле
Силы на руле
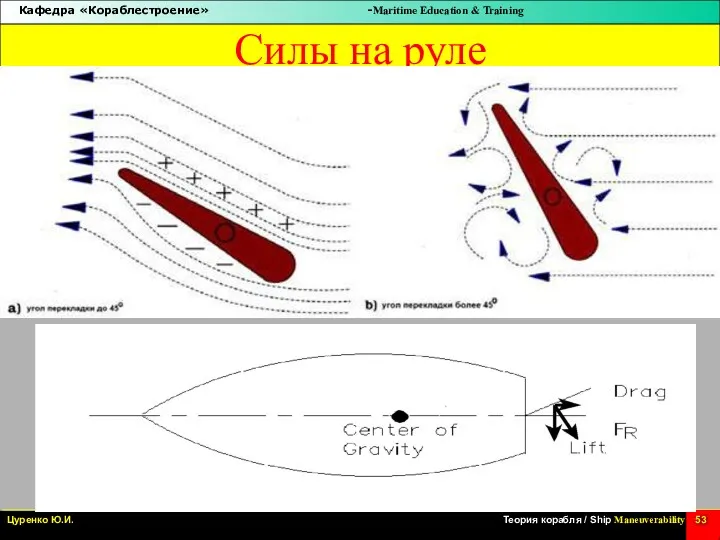
Силы на руле
Силы на руле
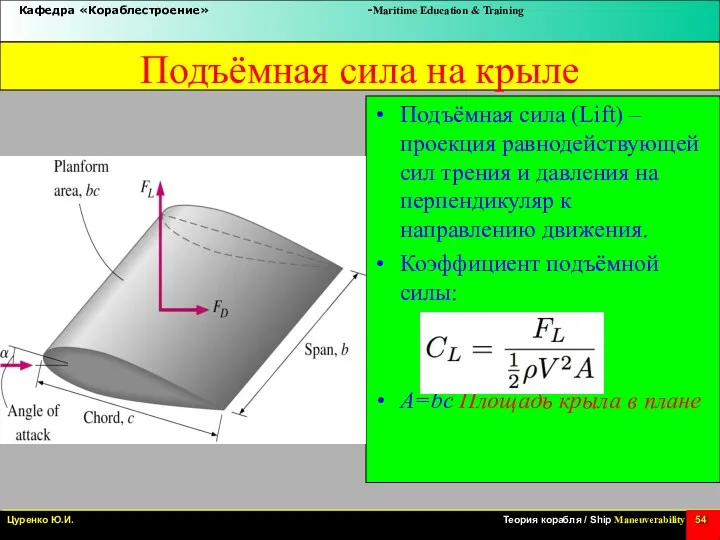
Подъёмная сила на крыле
Подъёмная сила (Lift) – проекция равнодействующей сил трения
Подъёмная сила на крыле
Подъёмная сила (Lift) – проекция равнодействующей сил трения

Балансирный руль \ Balanced Rudder
Баллер руля проходит через центр давления,
Баллер руля проходит через центр давления,
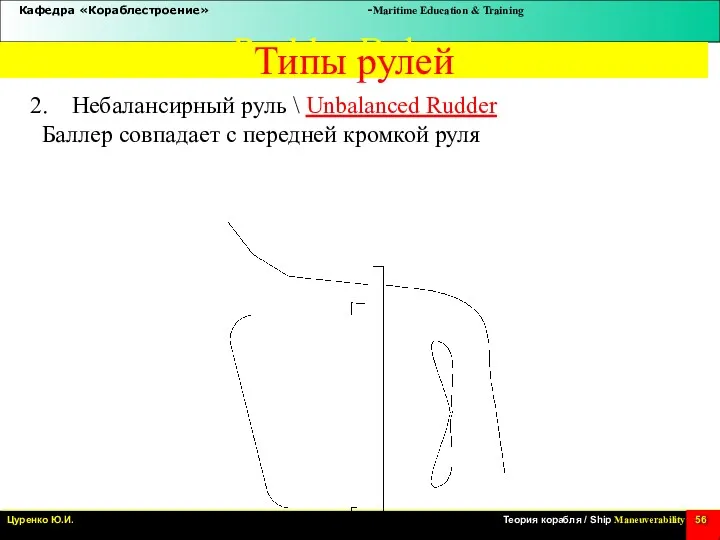
Небалансирный руль \ Unbalanced Rudder
Баллер совпадает с передней кромкой
Небалансирный руль \ Unbalanced Rudder
Баллер совпадает с передней кромкой
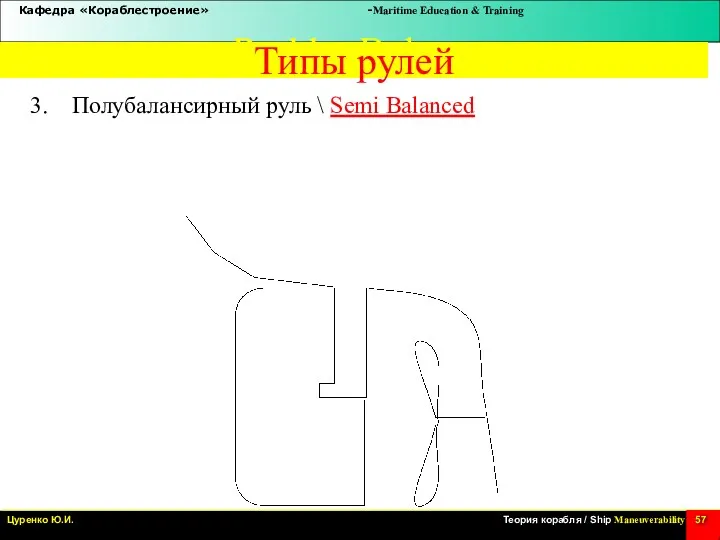
Полубалансирный руль \ Semi Balanced
Rudder Balance
Типы рулей
Полубалансирный руль \ Semi Balanced
Rudder Balance
Типы рулей
Стадии маневрирования:
Набегающий поток
Работа руля
Стадии маневрирования:
Набегающий поток
Работа руля
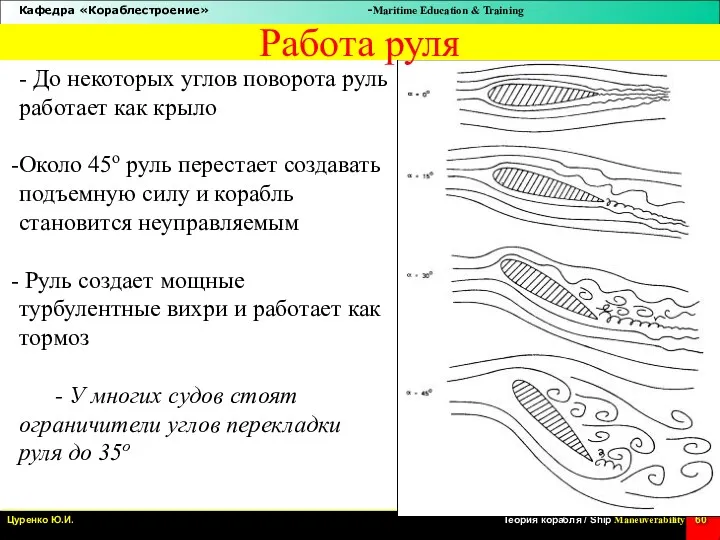
- До некоторых углов поворота руль работает как крыло
Около 45o руль
- До некоторых углов поворота руль работает как крыло
Около 45o руль
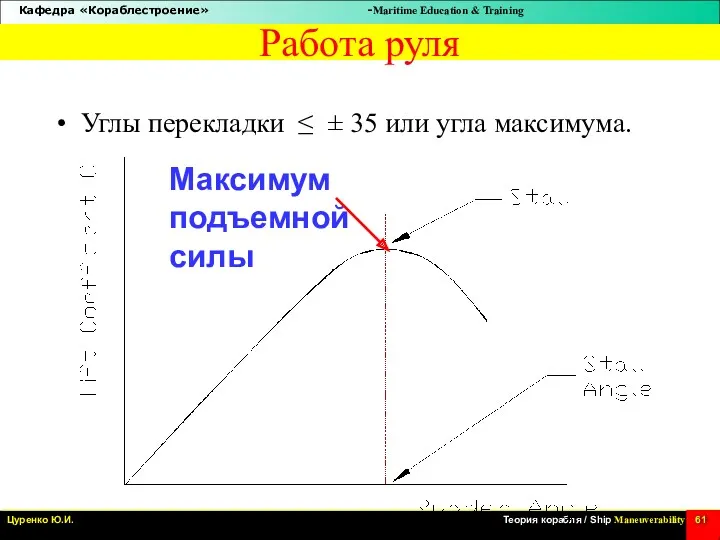
Углы перекладки ≤ ± 35 или угла максимума.
Максимум подъемной силы
Работа
Углы перекладки ≤ ± 35 или угла максимума.
Максимум подъемной силы
Работа

Маневренность на малых скоростях
\ Slow Speed Maneuverability
Маневренность на малых скоростях
\ Slow Speed Maneuverability
Винторулевой комплекс морских судов, как правило, не обеспечивает их необходимую маневренность
Винторулевой комплекс морских судов, как правило, не обеспечивает их необходимую маневренность
СРЕДСТВА АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ
Активный руль.
Роторный руль
Руль Беккера-Ястрема.
Фланкирующий
СРЕДСТВА АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ
Активный руль.
Роторный руль
Руль Беккера-Ястрема.
Фланкирующий

АКТИВНЫЙ РУЛЬ
Наиболее широко применяемым средством управления является руль, который может быть
АКТИВНЫЙ РУЛЬ
Наиболее широко применяемым средством управления является руль, который может быть
РОТОРНЫЙ РУЛЬ
Роторный руль представляет собой поворотное перо, перед которым расположен цилиндр,
РОТОРНЫЙ РУЛЬ
Роторный руль представляет собой поворотное перо, перед которым расположен цилиндр,

Руль с закрылком на ППХ и ПСХ в большинстве случаев применяется
Руль с закрылком на ППХ и ПСХ в большинстве случаев применяется
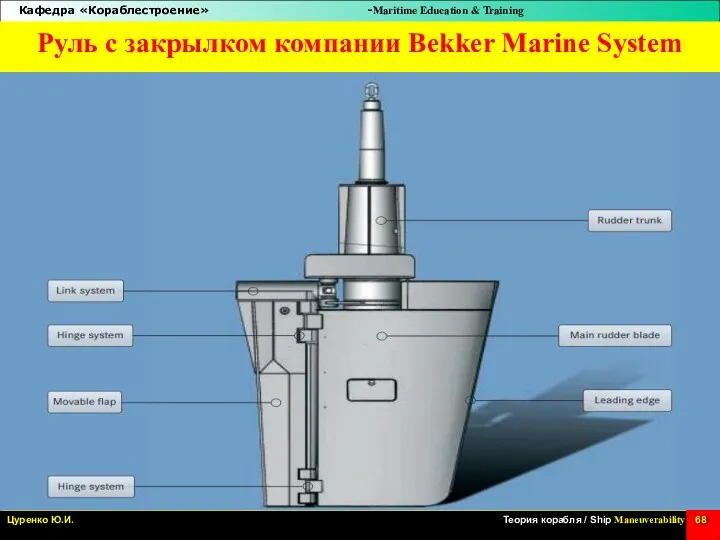
Руль с закрылком компании Bekker Marine System
Руль с закрылком компании Bekker Marine System
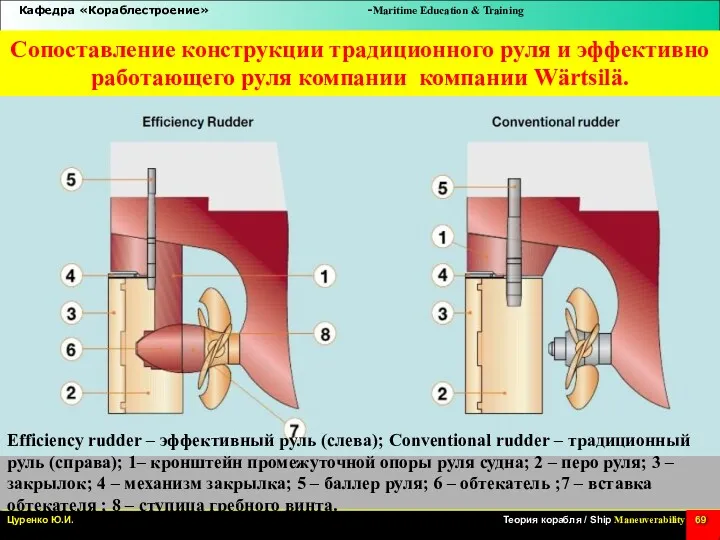
Сопоставление конструкции традиционного руля и эффективно работающего руля компании компании Wärtsilä.
Efficiency
Сопоставление конструкции традиционного руля и эффективно работающего руля компании компании Wärtsilä.
Efficiency

ФЛАНКИРУЮЩИЙ РУЛЬ
Для обеспечения управляемости на заднем ходу толкачи оборудуются рулями заднего
ФЛАНКИРУЮЩИЙ РУЛЬ
Для обеспечения управляемости на заднем ходу толкачи оборудуются рулями заднего
НОСОВЫЕ РУЛИ
Носовые рули. Для улучшения поворотливости и уменьшения ширины ходовой полосы,
НОСОВЫЕ РУЛИ
Носовые рули. Для улучшения поворотливости и уменьшения ширины ходовой полосы,
РУЛЬ ШИЛЛИНГА
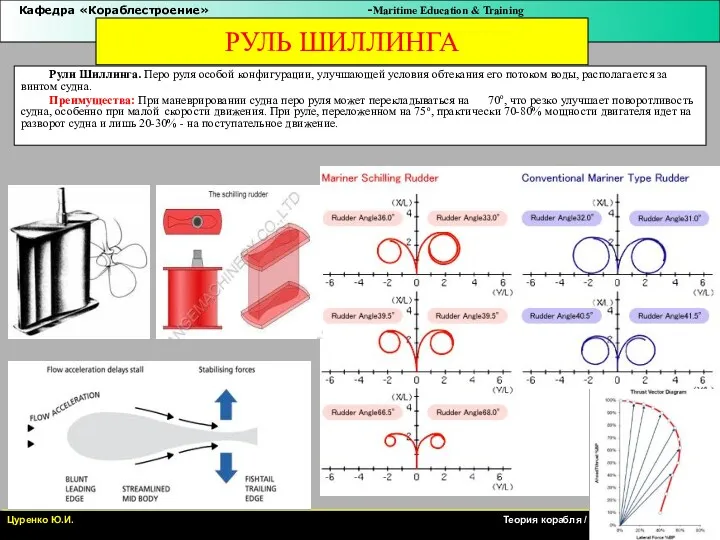
Рули Шиллинга. Перо руля особой конфигурации, улучшающей условия обтекания его потоком
РУЛЬ ШИЛЛИНГА
Рули Шиллинга. Перо руля особой конфигурации, улучшающей условия обтекания его потоком
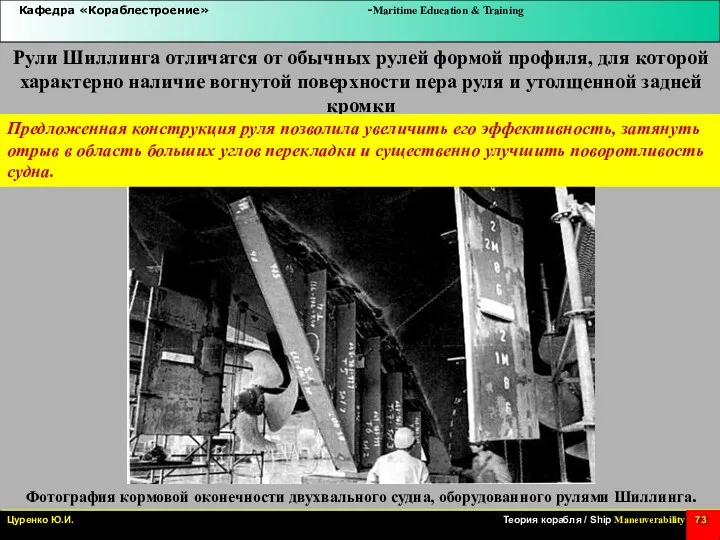
Рули Шиллинга отличатся от обычных рулей формой профиля, для которой характерно
Рули Шиллинга отличатся от обычных рулей формой профиля, для которой характерно
ДВОЙНЫЕ РУЛИ ШИЛЛИНГА
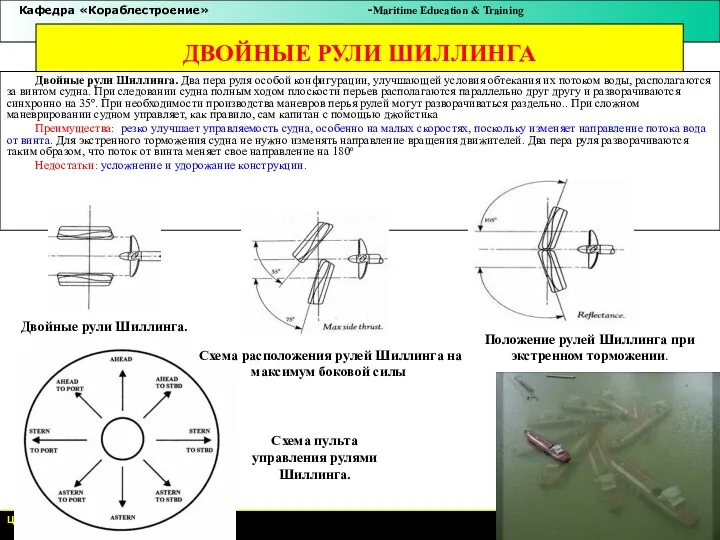
Двойные рули Шиллинга. Два пера руля особой конфигурации, улучшающей условия
ДВОЙНЫЕ РУЛИ ШИЛЛИНГА
Двойные рули Шиллинга. Два пера руля особой конфигурации, улучшающей условия

Раздельные поворотные насадки. Поворотная насадка – это стальное кольцо, профиль которого
Раздельные поворотные насадки. Поворотная насадка – это стальное кольцо, профиль которого
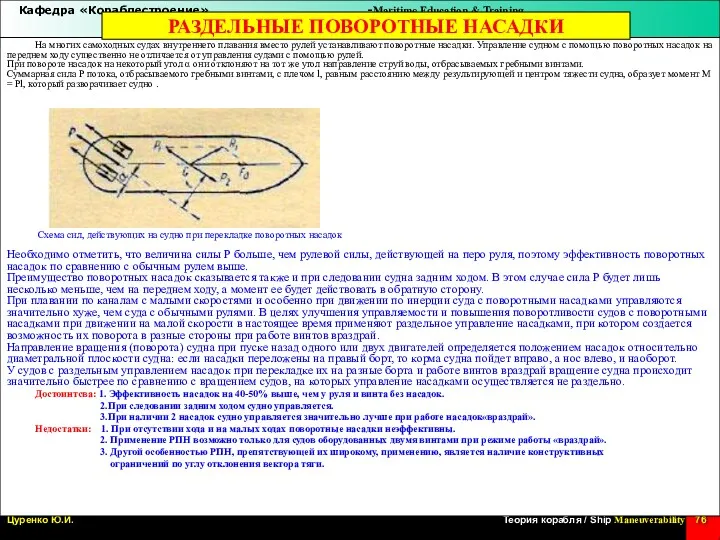
На многих самоходных судах внутреннего плавания вместо рулей устанавливают поворотные насадки.
На многих самоходных судах внутреннего плавания вместо рулей устанавливают поворотные насадки.
РАЗДЕЛЬНЫЕ ПОВОРОТНЫЕ НАСАДКИ
РАЗДЕЛЬНЫЕ ПОВОРОТНЫЕ НАСАДКИ

Тоннельное подруливающее устройство — судовое устройствосудовое устройство, предназначенное для активного управления судномсудовое устройство, предназначенное
Тоннельное подруливающее устройство — судовое устройствосудовое устройство, предназначенное для активного управления судномсудовое устройство, предназначенное
Маневренность на малых скоростях \ Slow Speed Maneuverability
Маневренность на малых скоростях \ Slow Speed Maneuverability
ГЛАВНЫЕ ВИНТОРУЛЕВЫЕ КОЛОНКИ
Последние годы отмечены поступлением на флот судов с принципиально
ГЛАВНЫЕ ВИНТОРУЛЕВЫЕ КОЛОНКИ
Последние годы отмечены поступлением на флот судов с принципиально

В последнее время получила распространение электродвижущаяся система Azipod (Azimuth Pod – азимутальная
В последнее время получила распространение электродвижущаяся система Azipod (Azimuth Pod – азимутальная

Z-ОБРАЗНАЯ ПЕРЕДАЧА(угловая колонка) – Z-drive
Z-образная передача (угловая колонка) — механическая передача (угловая колонка) — механическая передача, состоящая
Z-ОБРАЗНАЯ ПЕРЕДАЧА(угловая колонка) – Z-drive
Z-образная передача (угловая колонка) — механическая передача (угловая колонка) — механическая передача, состоящая

ВЫДВИЖНОЕ АЗИМУТАЛЬНОЕ ПОДРУЛИВАЮЩЕЕ УСТВОЙСТВО
Выдвижное азимутальное подруливающее устройство — в судостроении гребной винт — в
ВЫДВИЖНОЕ АЗИМУТАЛЬНОЕ ПОДРУЛИВАЮЩЕЕ УСТВОЙСТВО
Выдвижное азимутальное подруливающее устройство — в судостроении гребной винт — в

Водомётный движитель (водомёт) — движитель (водомёт) — движитель, у которого сила, движущая судно (водомёт) — движитель, у которого сила, движущая судно, создаётся
Водомётный движитель (водомёт) — движитель (водомёт) — движитель, у которого сила, движущая судно (водомёт) — движитель, у которого сила, движущая судно, создаётся
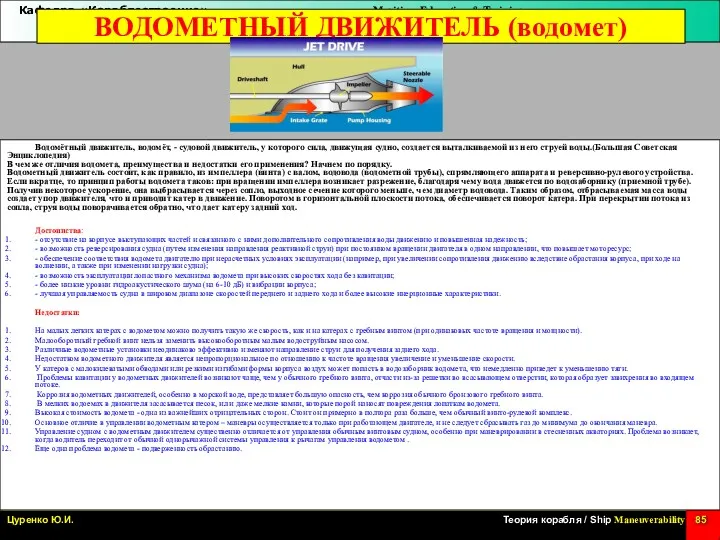
Водомётный движитель, водомёт, - судовой движитель, у которого сила, движущая судно,
Водомётный движитель, водомёт, - судовой движитель, у которого сила, движущая судно,

Судовой крыльчатый движитель, известный также под названием движитель Фойта — Шнайдера (англ. Voith Schneider
Судовой крыльчатый движитель, известный также под названием движитель Фойта — Шнайдера (англ. Voith Schneider
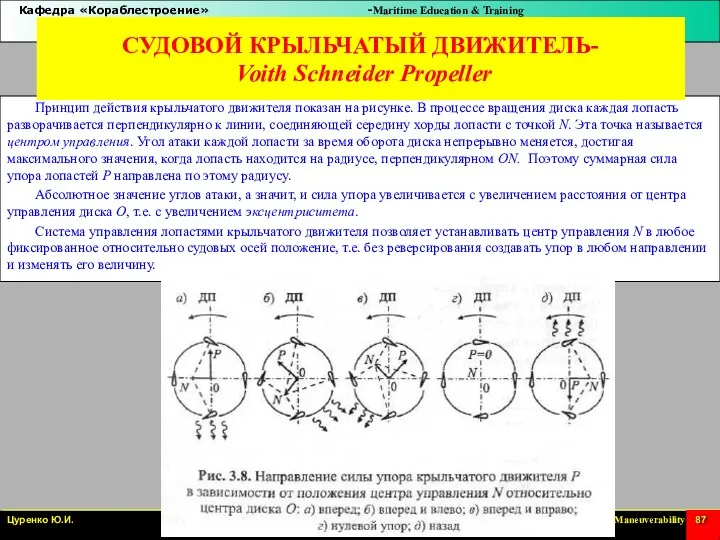
Принцип действия крыльчатого движителя показан на рисунке. В процессе вращения диска
Принцип действия крыльчатого движителя показан на рисунке. В процессе вращения диска
Крыльчатые движители. Они устанавливаются, как правило, на судах портофлота, повышают их
Крыльчатые движители. Они устанавливаются, как правило, на судах портофлота, повышают их

СИСТЕМА ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ
Система Динамического Позиционирования это интегрированная система управления судном, спроектированная удерживать
СИСТЕМА ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ
Система Динамического Позиционирования это интегрированная система управления судном, спроектированная удерживать

Система динамического позиционирования — (англ. dynamic positioning system) — система, предназначенная для удержания судна
Система динамического позиционирования — (англ. dynamic positioning system) — система, предназначенная для удержания судна
Маневренность на малых скоростях \ Slow Speed Maneuverability
Маневренность на малых скоростях \ Slow Speed Maneuverability

Маневренность на малых скоростях \ Slow Speed Maneuverability
Маневренность на малых скоростях \ Slow Speed Maneuverability

Маневренность на малых скоростях \ Slow Speed Maneuverability
Маневренность на малых скоростях \ Slow Speed Maneuverability
Виды маневренных испытаний
• IMO standard maneuvers (Стандартные тесты ИМО):
– Zig-zag (Зиг-Заг)
•
Виды маневренных испытаний
• IMO standard maneuvers (Стандартные тесты ИМО):
– Zig-zag (Зиг-Заг)
•
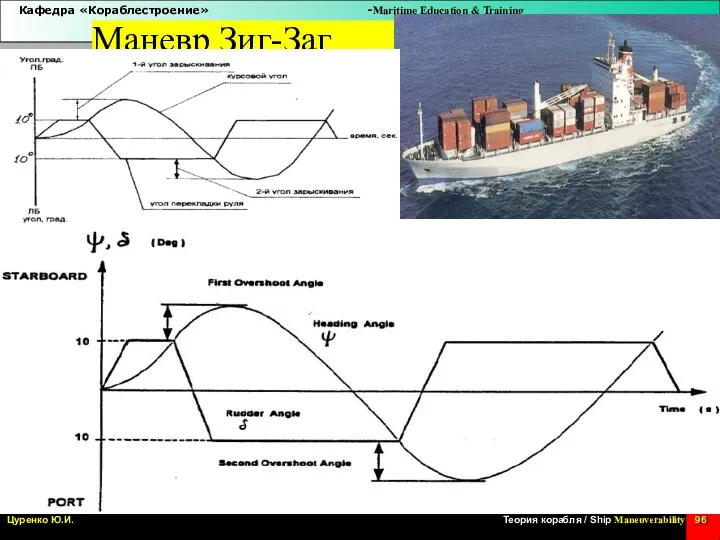
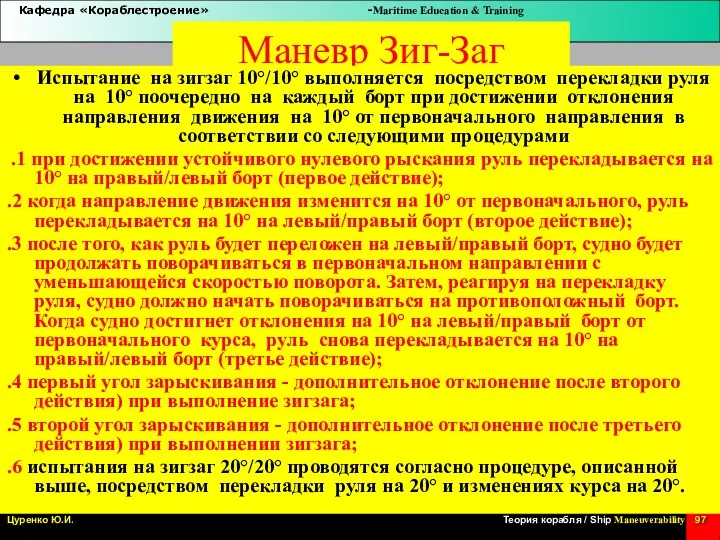
Маневр Зиг-Заг
Маневр Зиг-Заг
Маневр Зиг-Заг
Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на 10°
Маневр Зиг-Заг
Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на 10°

Маневр выхода на циркуляцию
Маневр выхода на циркуляцию
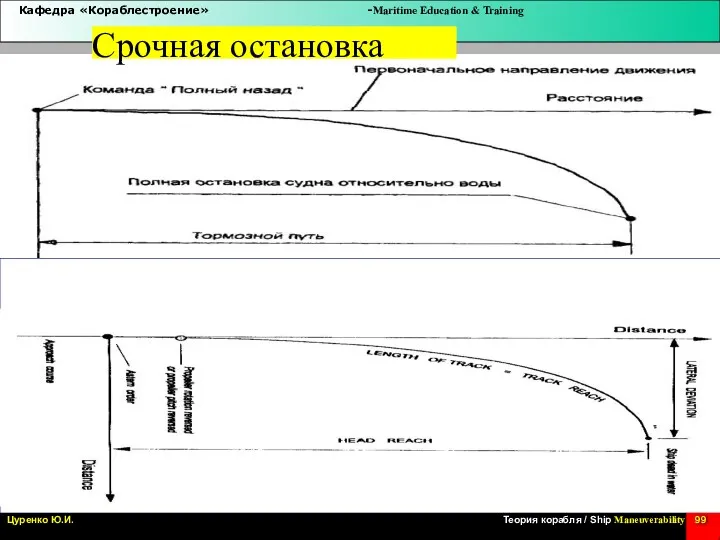
Срочная остановка
Срочная остановка
ИНФОРМАЦИЯ О МАНЕВРЕННЫХ ХАРАКТЕРИСТИКАХ СУДНА
Информация о маневренных характеристиках судна в соответствии
ИНФОРМАЦИЯ О МАНЕВРЕННЫХ ХАРАКТЕРИСТИКАХ СУДНА
Информация о маневренных характеристиках судна в соответствии
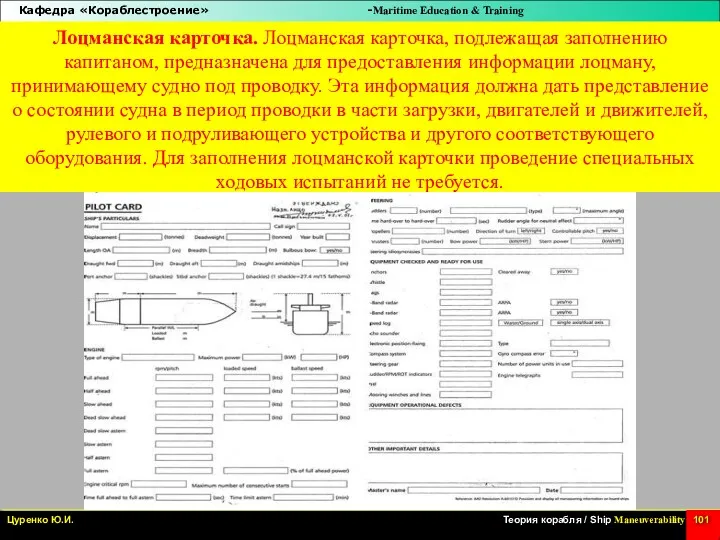
Лоцманская карточка. Лоцманская карточка, подлежащая заполнению капитаном, предназначена для предоставления информации лоцману,
Лоцманская карточка. Лоцманская карточка, подлежащая заполнению капитаном, предназначена для предоставления информации лоцману,
Таблица маневренных характеристик
В таблицу маневренных характеристик для рулевой рубки должны
Таблица маневренных характеристик
В таблицу маневренных характеристик для рулевой рубки должны
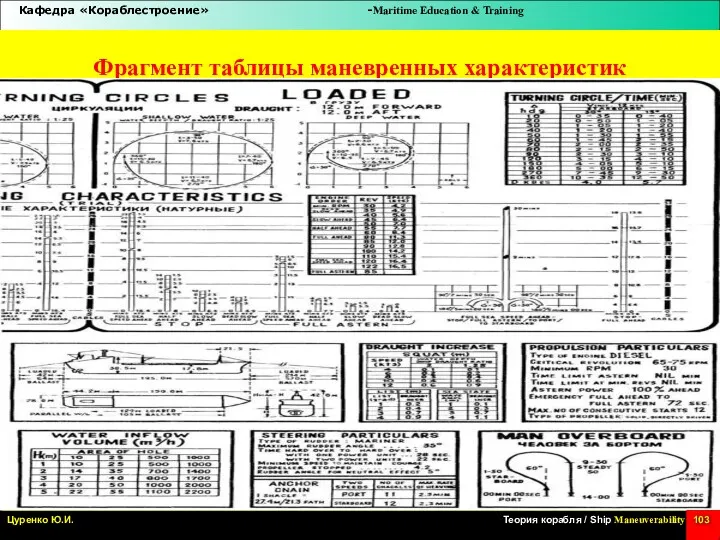
Фрагмент таблицы маневренных характеристик
Фрагмент таблицы маневренных характеристик
Формуляр маневренных элементов
Формуляр маневренных элементов должен содержать достаточно подробное описание маневренных
Формуляр маневренных элементов
Формуляр маневренных элементов должен содержать достаточно подробное описание маневренных
 Трехфазные цепи
Трехфазные цепи Электронный парамагнитный резонанс
Электронный парамагнитный резонанс Нанохимия и нанотехнологии. Спектральные методы исследования нанообъектов. (Лекция 4)
Нанохимия и нанотехнологии. Спектральные методы исследования нанообъектов. (Лекция 4) Дисперсия света. Интерференция. Применение интерференции. Физика. 11 класс
Дисперсия света. Интерференция. Применение интерференции. Физика. 11 класс Архимед күші. (7-сынып)
Архимед күші. (7-сынып) Размерная слесарная обработка деталей: шлифование ,опиливание. Зенкование, зенкерование, развертка
Размерная слесарная обработка деталей: шлифование ,опиливание. Зенкование, зенкерование, развертка Експлуатація навчального вертольота. Експлуатація трансмісії
Експлуатація навчального вертольота. Експлуатація трансмісії Виды излучений
Виды излучений Мастер-класс Ученик-исследователь
Мастер-класс Ученик-исследователь Решение задач Закон сохранения механической энергии
Решение задач Закон сохранения механической энергии Презентация к уроку 10 класс Положения МКТ
Презентация к уроку 10 класс Положения МКТ Звуковые волны
Звуковые волны Активізація пізнавальної діяльності учнів на уроках фізики шляхом використання проблемних ситуацій
Активізація пізнавальної діяльності учнів на уроках фізики шляхом використання проблемних ситуацій Импульсный сигнал
Импульсный сигнал использование метода мозгового штурма на уроках физики
использование метода мозгового штурма на уроках физики Всероссийский турнир юных физиков. Катание на диске
Всероссийский турнир юных физиков. Катание на диске Явление диффузии в жидкостях
Явление диффузии в жидкостях Проектирование участка диагностики и обслуживания ходовой части автомобиля
Проектирование участка диагностики и обслуживания ходовой части автомобиля Ашық сабақ
Ашық сабақ Звукові коливання 5 клас
Звукові коливання 5 клас Архимедова сила
Архимедова сила Второе и третье начала термодинамики циклические процессы. Лекция № 13
Второе и третье начала термодинамики циклические процессы. Лекция № 13 Композиты - древний материал будущего
Композиты - древний материал будущего Детали машин и механизмов. Основные положения и понятия раздела
Детали машин и механизмов. Основные положения и понятия раздела Изопроцессы в газах
Изопроцессы в газах Изобретение Рентгена
Изобретение Рентгена Световые явления природы
Световые явления природы §8. Плоскопараллельное движение твердого тела (плоское)
§8. Плоскопараллельное движение твердого тела (плоское)