- Механические характеристики асинхронных электродвигателей (лекция 4)

Содержание
- 2. Модель асинхронного электродвигателя. Достоинства асинхронного электродвигателя: простота конструкции; низкая металлоемкость; допускает прямой пуск от сети; повышенная
- 3. Модель асинхронного электродвигателя. Асинхронного электродвигатели изготавливают двух типов с фазным и короткозамкнутым ротором. 0
- 4. Модель асинхронного электродвигателя. Электродвигатели с короткозамкнутым ротором имеют обмотку ротора в виде «беличьей клетки». Она постоянна
- 5. Модель асинхронного электродвигателя.
- 6. Модель асинхронного электродвигателя. Пусть на статоре расположена катушка А-Х по которой протекает переменный ток iА =
- 7. Модель асинхронного электродвигателя. Если добавить катушку В-Y, расположенную под углом 900 и пропускать по ней ток
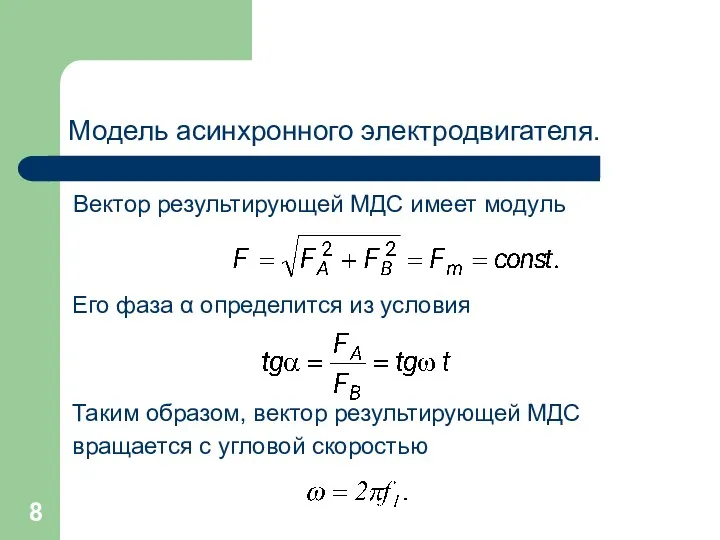
- 8. Модель асинхронного электродвигателя. Вектор результирующей МДС имеет модуль Его фаза α определится из условия Таким образом,
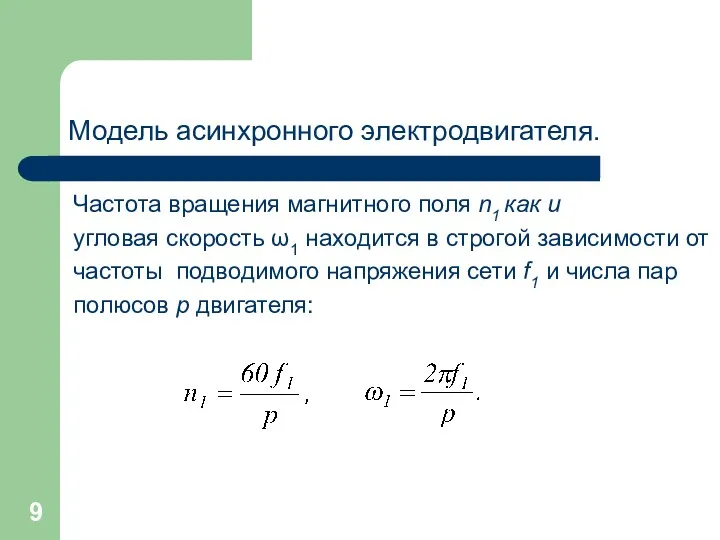
- 9. Модель асинхронного электродвигателя. Частота вращения магнитного поля n1 как и угловая скорость ω1 находится в строгой
- 10. Наведение в обмотке ротора ЭДС и появление вращающего или тормозящего момента асинхронного Двигателя возможно только при
- 11. Естественная механическая характеристика асинхронного электродвигателя
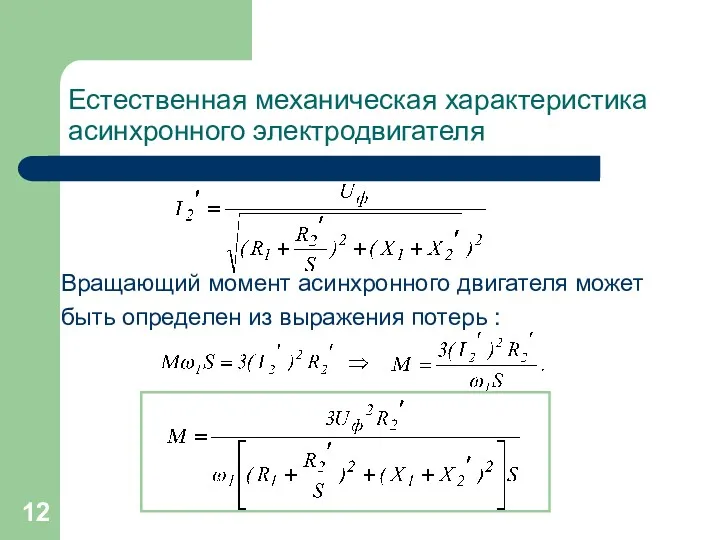
- 12. Естественная механическая характеристика асинхронного электродвигателя Вращающий момент асинхронного двигателя может быть определен из выражения потерь :
- 13. Естественная механическая характеристика асинхронного электродвигателя
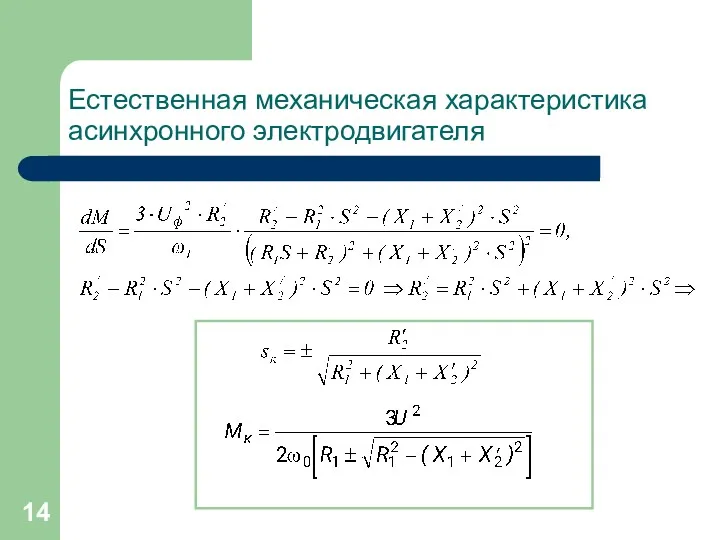
- 14. Естественная механическая характеристика асинхронного электродвигателя
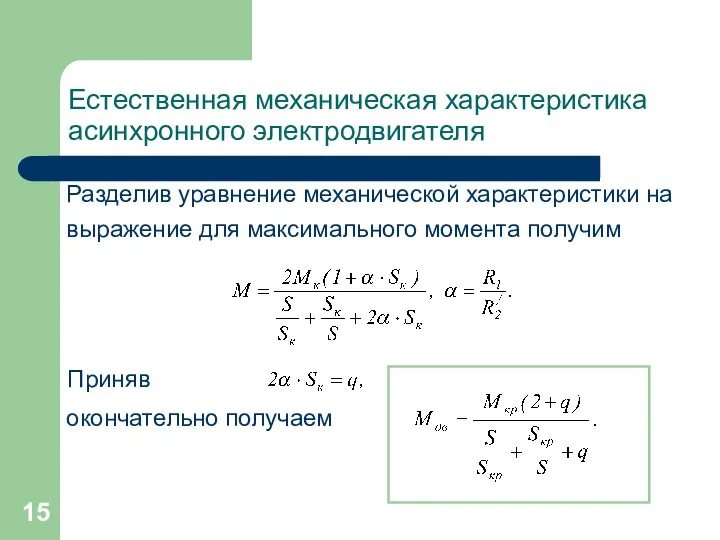
- 15. Естественная механическая характеристика асинхронного электродвигателя
- 16. Естественная механическая характеристика асинхронного электродвигателя
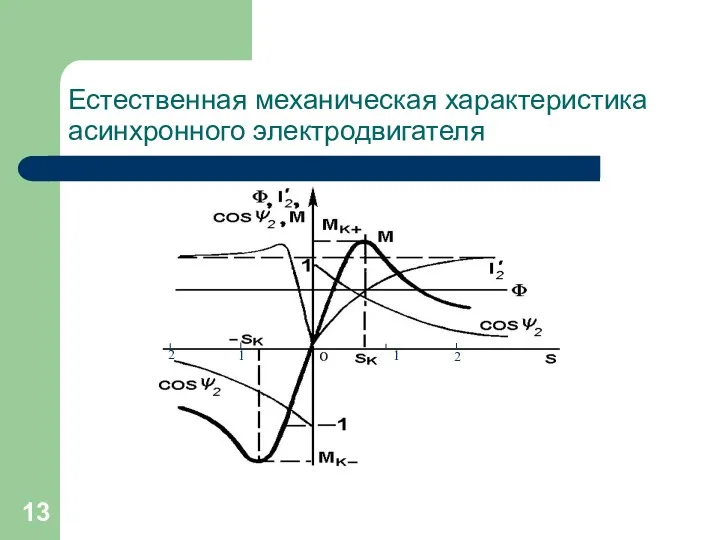
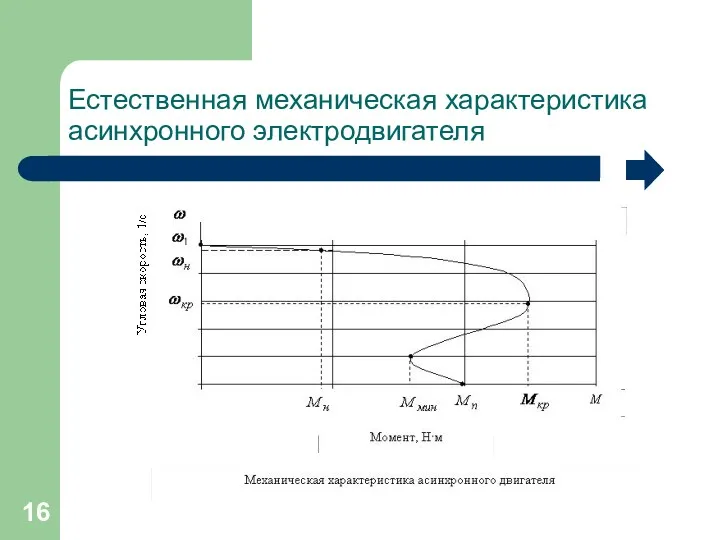
- 17. Естественная механическая характеристика асинхронного электродвигателя Характерными точками механической характеристики являются: пусковая точка – М=Мп; ω=0; точка
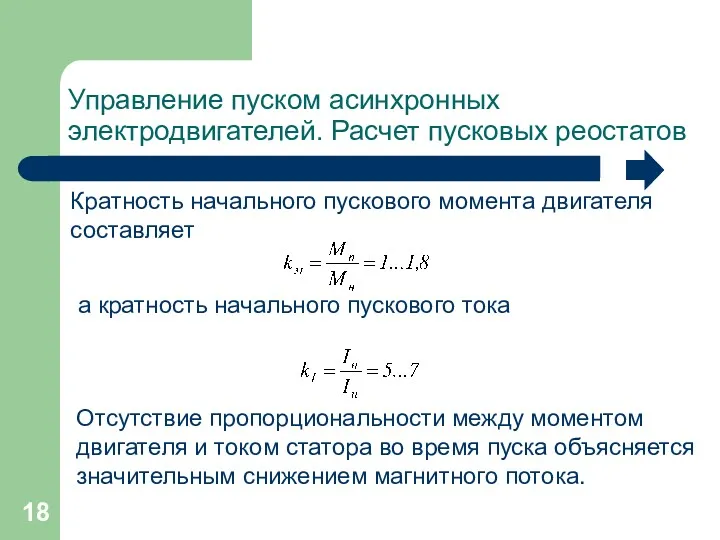
- 18. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Отсутствие пропорциональности между моментом двигателя и током статора во
- 19. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Для повышения начального пускового момента и снижения пускового тока
- 20. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов У двигателей с контактными кольцами начальный пусковой момент увеличивается
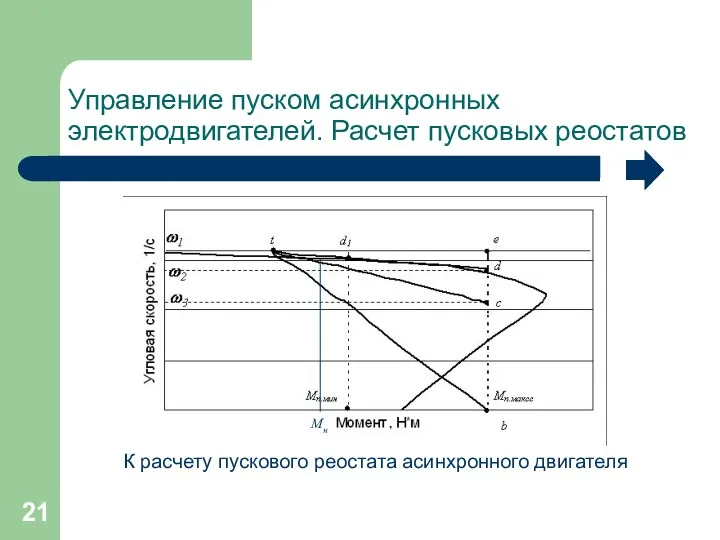
- 21. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
- 22. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Методика расчета: на характеристике Мдв=f(ω), наносятся границы пуска; через
- 23. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов в точке с координатами Мпуск мин, ω=ω3 происходит отключение
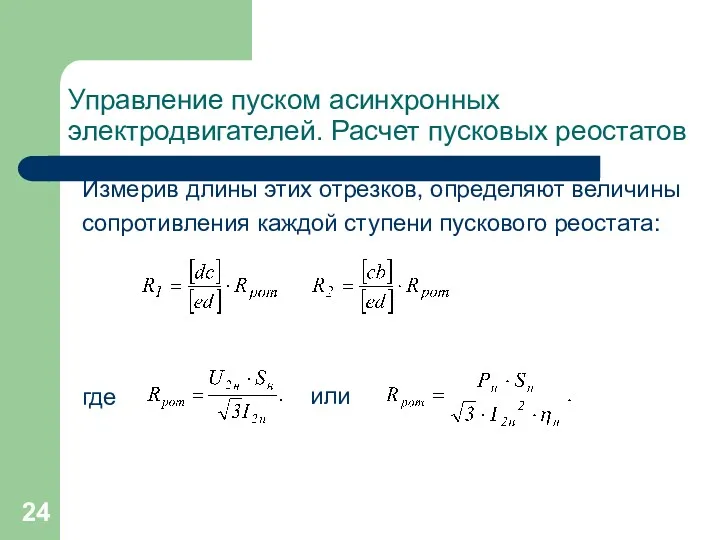
- 24. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Измерив длины этих отрезков, определяют величины сопротивления каждой ступени
- 25. Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов При реостатном пуске асинхронного электродвигателя с контактными кольцами поочередное
- 26. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов Для обеспечения заданной диаграммы пуска необходима фиксация моментов подачи
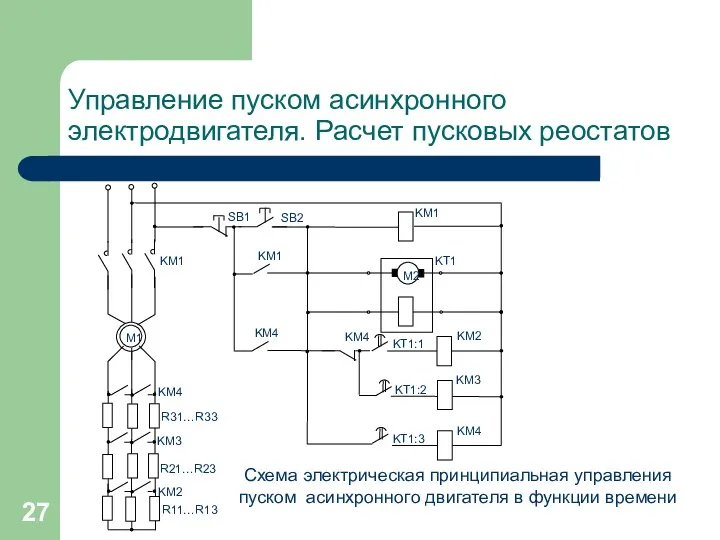
- 27. Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
- 29. Скачать презентацию
Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:
простота конструкции;
низкая металлоемкость;
допускает прямой пуск от сети;
повышенная
Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:
простота конструкции;
низкая металлоемкость;
допускает прямой пуск от сети;
повышенная
Модель асинхронного электродвигателя.
Асинхронного электродвигатели изготавливают двух типов с фазным и
Модель асинхронного электродвигателя.
Асинхронного электродвигатели изготавливают двух типов с фазным и
Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым ротором
имеют обмотку ротора в виде
Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым ротором
имеют обмотку ротора в виде
Модель асинхронного электродвигателя.
Модель асинхронного электродвигателя.
Модель асинхронного электродвигателя.
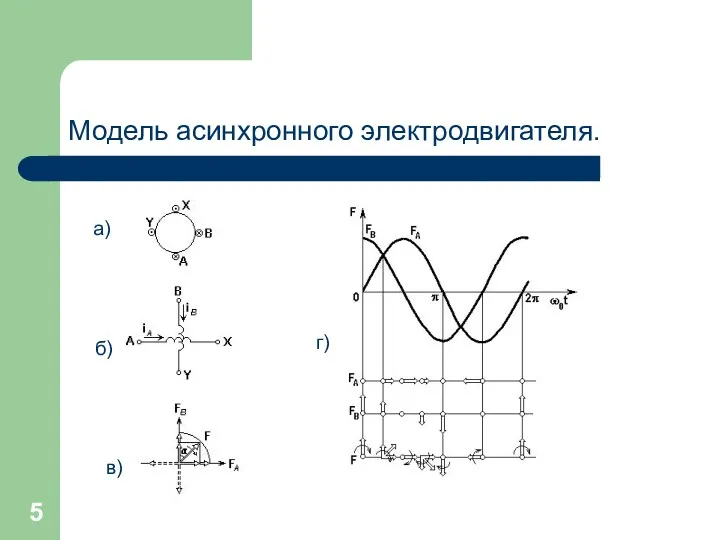
Пусть на статоре расположена катушка А-Х по
которой протекает переменный
Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х по
которой протекает переменный
Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом
900 и пропускать
Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом
900 и пропускать
Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модуль
Его фаза α определится из
Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модуль
Его фаза α определится из
Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как и
угловая скорость ω1
Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как и
угловая скорость ω1
Наведение в обмотке ротора ЭДС и появление
вращающего или тормозящего момента асинхронного
Двигателя
Наведение в обмотке ротора ЭДС и появление
вращающего или тормозящего момента асинхронного
Двигателя
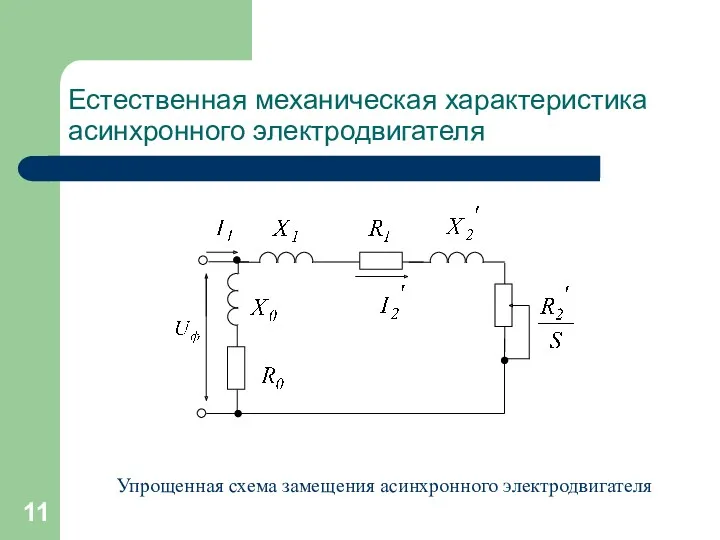
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Вращающий момент асинхронного двигателя может
быть определен
Естественная механическая характеристика асинхронного электродвигателя
Вращающий момент асинхронного двигателя может
быть определен
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристики
являются:
пусковая точка –
Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристики
являются:
пусковая точка –
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Отсутствие пропорциональности между моментом
двигателя
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Отсутствие пропорциональности между моментом
двигателя
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового момента
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового момента
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными кольцами
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными кольцами
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:
на характеристике Мдв=f(ω),
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:
на характеристике Мдв=f(ω),
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
в точке с координатами Мпуск
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
в точке с координатами Мпуск
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков, определяют
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков, определяют
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного электродвигателя
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного электродвигателя
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Для обеспечения заданной диаграммы пуска
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Для обеспечения заданной диаграммы пуска
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
 Рулевое управление
Рулевое управление Однородный полупроводник
Однородный полупроводник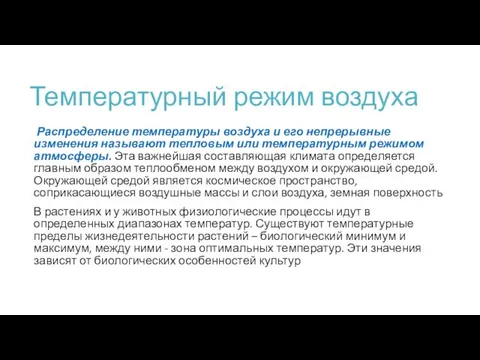 Температурный режим воздуха и почвы
Температурный режим воздуха и почвы Знатоки физики
Знатоки физики Cәләтле балаларны үстерү
Cәләтле балаларны үстерү Статистическое описание равновесных состояний. Функция распределения. Принцип детального равновесия. Распределение Максвелла
Статистическое описание равновесных состояний. Функция распределения. Принцип детального равновесия. Распределение Максвелла 1. Электростатика
1. Электростатика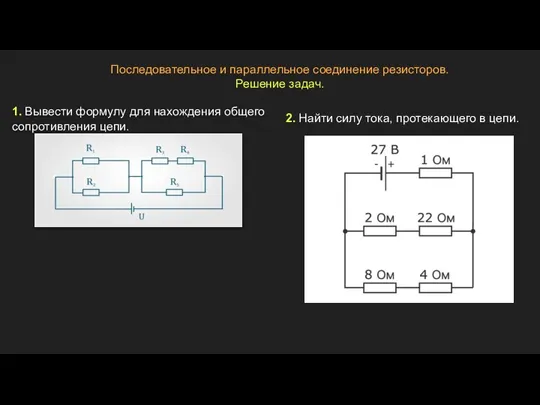 Последовательное и параллельное соединение резисторов. Решение задач
Последовательное и параллельное соединение резисторов. Решение задач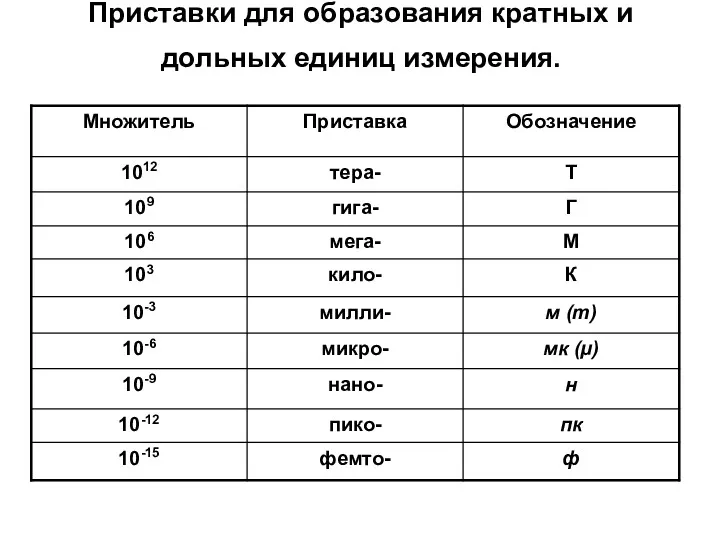 Приставки для образования кратных и дольных единиц измерения. Часть 3a
Приставки для образования кратных и дольных единиц измерения. Часть 3a Особенности эксплуатации колёсной бронетанковой техники в различных климатических условиях (занятие № 1)
Особенности эксплуатации колёсной бронетанковой техники в различных климатических условиях (занятие № 1) Цезий. Густав Роберт Кирхгоф
Цезий. Густав Роберт Кирхгоф Презентация Вес тела
Презентация Вес тела Неделя физики
Неделя физики Надежность технических систем. Основные понятия теории надежности
Надежность технических систем. Основные понятия теории надежности Люди нашего края
Люди нашего края Оптическая система. Лучевая и волновая оптика
Оптическая система. Лучевая и волновая оптика Стержневая система. Конструкция, состоящая из элементов, имеющих форму бруса
Стержневая система. Конструкция, состоящая из элементов, имеющих форму бруса Техническая термодинамика
Техническая термодинамика Сопротивление материалов
Сопротивление материалов Зміна сили струму в колі. Реостат
Зміна сили струму в колі. Реостат Выполнение судовых работ. Международные правила предупреждения столкновений судов в море
Выполнение судовых работ. Международные правила предупреждения столкновений судов в море Волна (волновой процесс)
Волна (волновой процесс) Виштовхувальна сила. Закон Архімеда
Виштовхувальна сила. Закон Архімеда Фотоефект та його застосування
Фотоефект та його застосування Архимедова сила
Архимедова сила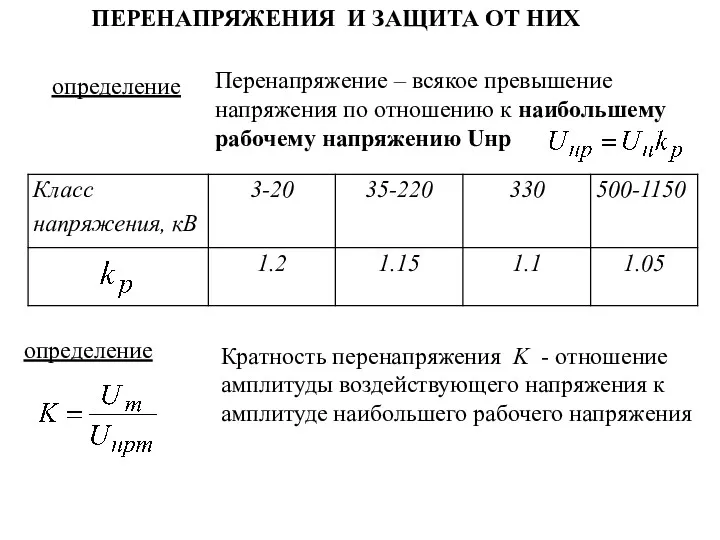 Перенапряжения и защита от них. (Лекция 2.2)
Перенапряжения и защита от них. (Лекция 2.2) Полупроводники
Полупроводники Радіоактивні перетворення
Радіоактивні перетворення