- Методи та системи неруйнівного контролю

Содержание
- 2. Неруйнівний контроль Неруйнівний контроль (скорочено НК) — контроль властивостей і параметрів об'єкта, не руйнуючи його та
- 3. Існує також і поняття руйнівного контролю. Наприклад, точно виміряти міцність на розрив якогось об'єкта можна тільки
- 4. Види НК Акустичний контроль Вихрострумовий контроль Радіохвильовий контроль Радіаційний контроль Електричний контроль Тепловий контроль Оптичний контроль
- 5. ОСНОВИ скануючої зондової мікроскопії
- 6. НАВЧАЛЬНО-МЕТОДИЧНІ МАТЕРІАЛИ ОСНОВНІ 1. В.Л. Миронов "Основы сканирующей зондовой микроскопии: Учебное пособие для студентов старших курсов
- 7. ДОДАТКОВІ 1. G.Binnig, C.F.Quate, Ch.Gerber Atomic force microscope. // Phys. Rev. Lett., v. 56, № 9,
- 8. СВІТЛОВІ МІКРОСКОПИ Разрешение оптических приборов принципиально ограничено дифракциейРазрешение оптических приборов принципиально ограничено дифракцией на объективеРазрешение оптических
- 9. ЕЛЕКТРОННІ МІКРОСКОПИ ПРОСВІЧУЮЧІ- РОЗДІЛЬНА ЗДАТНІСТЬ~ 0,1 нм РАСТРОВІ- ДІАМЕТР ПУЧКА ~ 5 нм 8 λ =
- 10. ЕЛЕКТРОННО-МІКРОСКОПІЧНІ ЗОБРАЖЕННЯ ЖГУТИКОВИХ БАКТЕРІЙ
- 11. Тема I. Техніка скануючої зондової мікроскопії
- 12. 1.1. Принципи роботи скануючих зондових мікроскопів Скануючий тунельний мікроскоп (СТМ ) – перший із сімейства зондових
- 13. Система зворотнього зв ’ язку підтримує значення параметра Р постійним, рівним величині Ро , заданної оператором.
- 14. ТЕНЗОР ТЕНЗОР в математике - величина, обладающая компонентами в каждой из заданного множества систем координат, причем
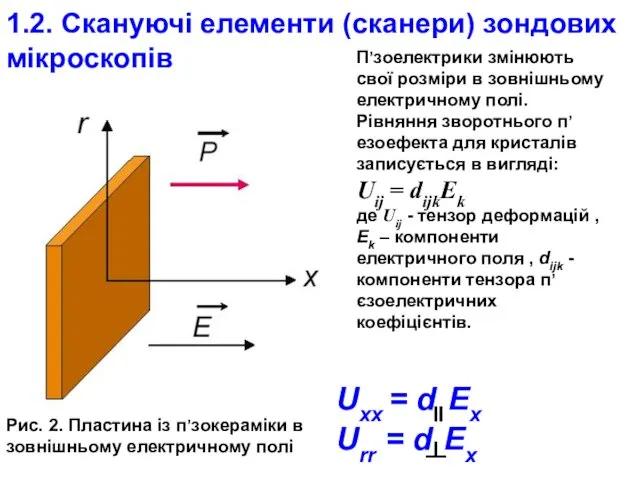
- 15. 1.2. Скануючі елементи (сканери) зондових мікроскопів Рис. 2. Пластина із п’зокераміки в зовнішньому електричному полі П’зоелектрики
- 16. Мы говорим, что поляризация линейно зависит от поля; поэтому если у нас есть электрическое поле Е
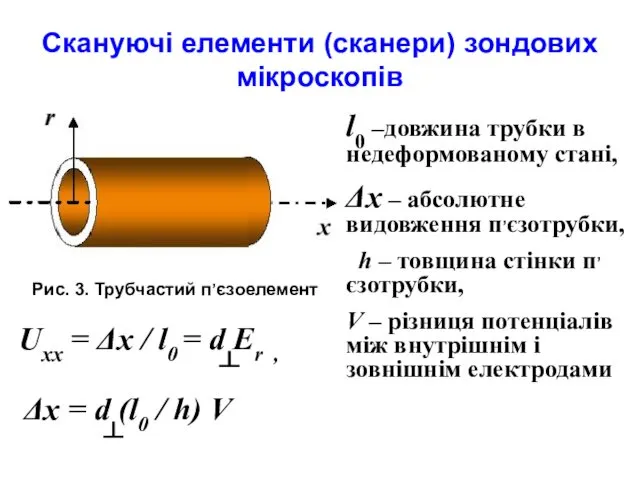
- 17. Скануючі елементи (сканери) зондових мікроскопів Рис. 3. Трубчастий п’єзоелемент Uxx = Δx / l0 = d
- 18. Скануючі елементи (сканери) зондових микроскопів Рис. 4. Сканучий елемент у вигляді трипода, зібраний на трубчастих п’єзоелементах
- 19. На сьогоднішний день в скануючій зондовій мікроскопії найбільш широко використовуються сканери, виготовлені на основі одного трубчастого
- 20. Широке розповсюдження отримали також сканери на основі біморфних п’єзоэлементів. Біморф являє собою дві пластини п’езоелектрика, склеєні
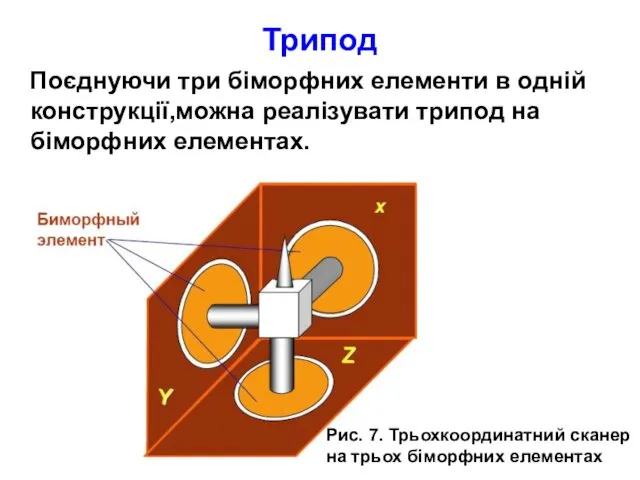
- 21. Трипод Поєднуючи три біморфних елементи в одній конструкції,можна реалізувати трипод на біморфних елементах. Рис. 7. Трьохкоординатний
- 22. Якщо зовнішні електроди біморфного елемента розділити на чотири сектори, то можна организувати рух зонда вздовж осі
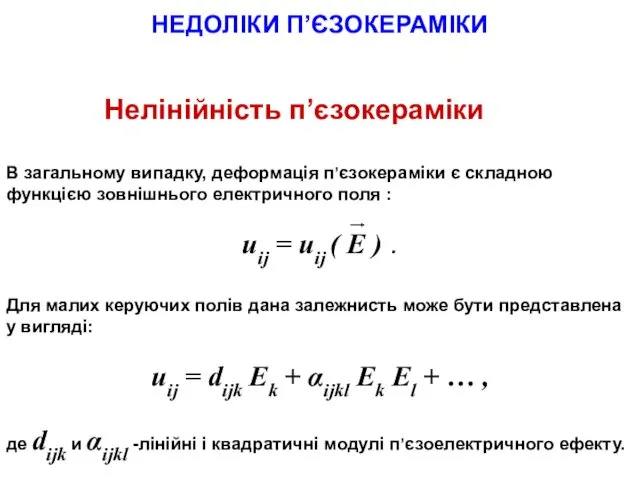
- 23. НЕДОЛІКИ П’ЄЗОКЕРАМІКИ Нелінійність п’єзокераміки В загальному випадку, деформація п’єзокераміки є складною функцією зовнішнього електричного поля :
- 24. Типові значення полів E*, при яких починаються виявлятися нелінійні ефекти, складають порядка 100 В/мм. Тому для
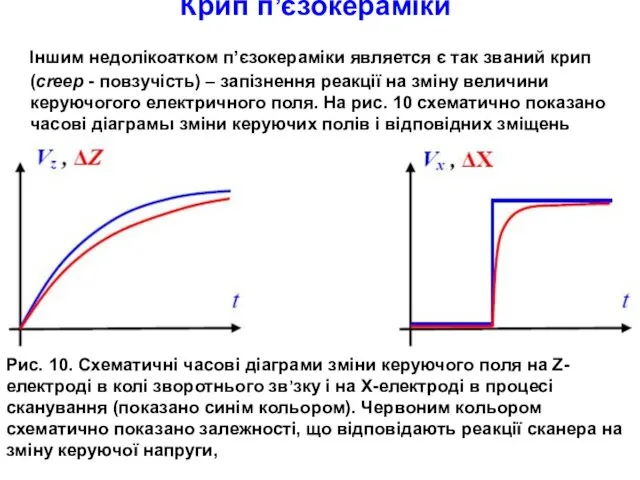
- 25. Крип п’єзокераміки Іншим недолікоатком п’єзокераміки является є так званий крип (creep - повзучість) – запізнення реакції
- 26. Наявність крипу призводить до того, що в СЗМ зображеннях спостерігаються геометричні спотворення. Особливо сильно крип виявляється
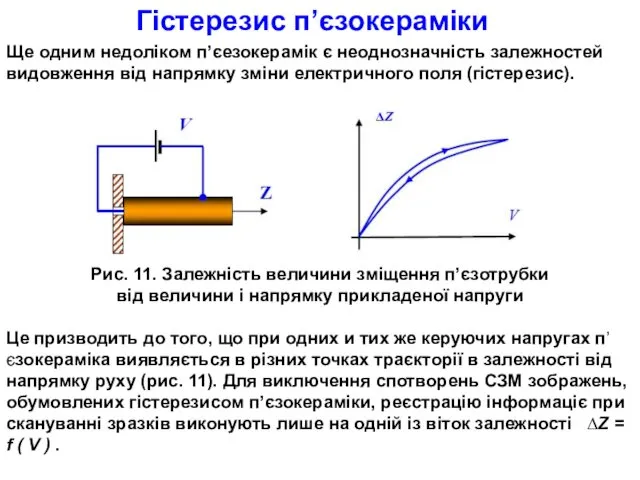
- 27. Гістерезис п’єзокераміки Ще одним недоліком п’єезокерамік є неоднозначність залежностей видовження від напрямку зміни електричного поля (гістерезис).
- 28. 1.3. Пристрої для прицизійних переміщеню зонда и зразка Рис. 12. Схема важільного редуктора переміщень Механічний важіль
- 29. Пружинний редуктор переміщень Із умови рівноваги випливає, що де ∆l и ∆L - зміщення пружини і
- 30. Крокові електродвигуни Найбільш просту конструкцію мають двигуни з постійними магнітами. Вони складаються із статора, який має
- 31. Крокові п’єзодвигуни На рисунку 15 позначено : 1 – основа ; 2 – п’єзоелектрична трубка ;
- 32. 1.4. Захист зондових мікроскопів від зовнішних вливів Захист від вібрацій Любая конструкция сканирующего зондового микроскопа представляет
- 33. С целью гашения колебаний на собственных резонансных частотах в виброизолирующие системы вводят диссипативные элементы с вязким
- 34. Таким образом, для получения резонансной частоты виброизолирующей системы порядка 1 Гц необходимо , чтобы удлинение (или
- 35. Для защиты головок СЗМ успешно применяются также активные системы подавления внешних вибраций . Такие устройства представляют
- 36. Действительно , пусть под действием внешней силы платформа колеблется на частоте ω, так что ее смещение
- 37. Захист від акустичних шумів Рис . 20. Защита СЗМ от акустических шумов Особенностью акустических помех является
- 38. Стабілізація термодрейфа положення зонда над поверхнею Одной из важных проблем СЗМ является задача стабилизации положения зонда
- 39. Идея термокомпенсации заключается в следующем . Любую конструкцию СЗМ можно представить в виде набора элементов с
- 40. 1.5. Формування і обробка СЗМ зображень Процесс сканирования поверхности в сканирующем зондовом микроскопе имеет сходство с
- 41. j Информация , полученная с помощью сканирующего зондового микроскопа, хранится в виде СЗМ кадра - двумерного
- 42. Рис. 24. 3D визуализация рельефа поверхности с подсветкой по высоте (а) и с боковой подсветкой (б)
- 43. Рис. 25. Яркостное 2D изображение поверхности
- 44. СЗМ изображения, наряду с полезной информацией, содержат также много побочной информации, искажающей данные о морфологии и
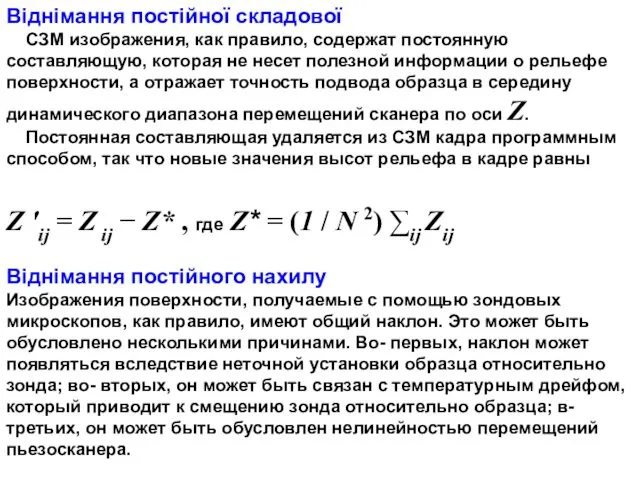
- 45. Віднімання постійної складової СЗМ изображения, как правило, содержат постоянную составляющую, которая не несет полезной информации о
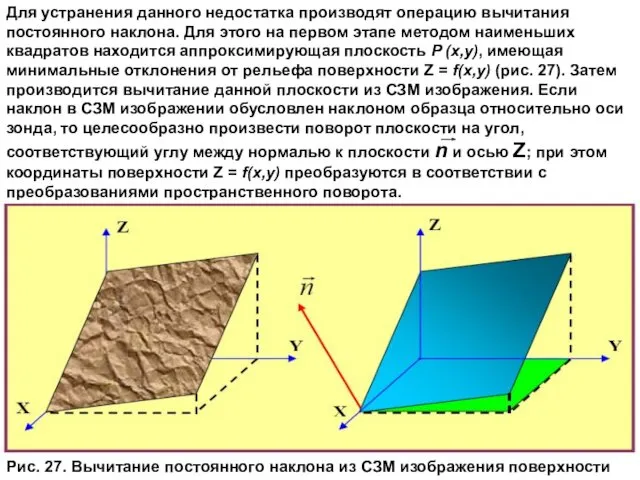
- 46. Для устранения данного недостатка производят операцию вычитания постоянного наклона. Для этого на первом этапе методом наименьших
- 47. Если наклон обусловлен термодрейфом, то процедура вычитания наклона сводится к вычитанию Z – координат плоскости из
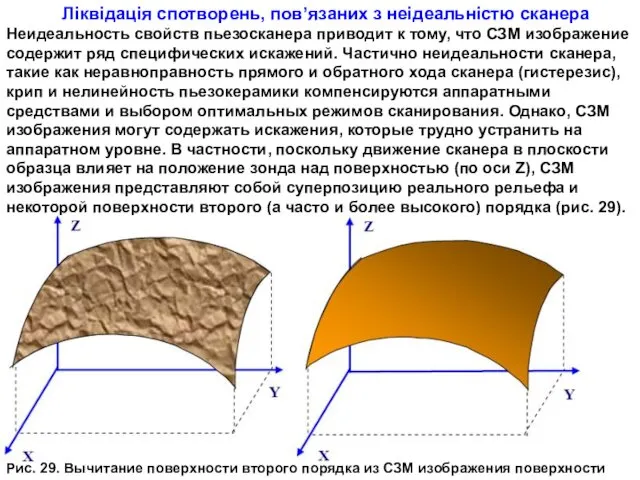
- 48. Ліквідація спотворень, пов’язаних з неідеальністю сканера Неидеальность свойств пьезосканера приводит к тому, что СЗМ изображение содержит
- 49. Для устранения искажений такого рода методом наименьших квадратов находится аппроксимирующая поверхность второго порядка P(2)(x,y), имеющая минимальные
- 50. Фільтрація СЗМ зображень Шумы аппаратуры (в основном, это шумы высокочувствительных входных усилителей), нестабильности контакта зонд-образец при
- 51. Медиа́нный фи́льтр — один из видов цифровых фильтровМедиа́нный фи́льтр — один из видов цифровых фильтров, широко
- 52. СХЕМА МЕДІАННОЇ ФІЛЬТРАЦІЇ ПРИКЛАД МЕДІАННОЇ ФІЛЬТРАЦІЇ
- 53. Медіанна фільтрація. Хорошие результаты при удалении высокочастотных случайных помех в СЗМ кадрах дает медианная фильтрация. Это
- 54. На рис. 32 представлен результат медианной фильтрации реального АСМ изображения поверхности Рис. 32. Результаты медианной фильтрации
- 55. Усереднення по рядках Процесс сканирования поверхности в сканирующем зондовом микроскопе происходит таким образом, что частота регистрации
- 56. На рис. 33 представлен результат выравнивания по строкам реального АСМ изображения поверхности. Рис. 33. АСМ изображения
- 57. Преобразование Фурье. Линейная фильтрация в частотной области Линейная фильтрация изображений может осуществляться как в пространственной, так
- 58. Полутоновое изображение и его Фурье-образ (изображения получены в системе LabVIEW) Фур’є - фільтрація
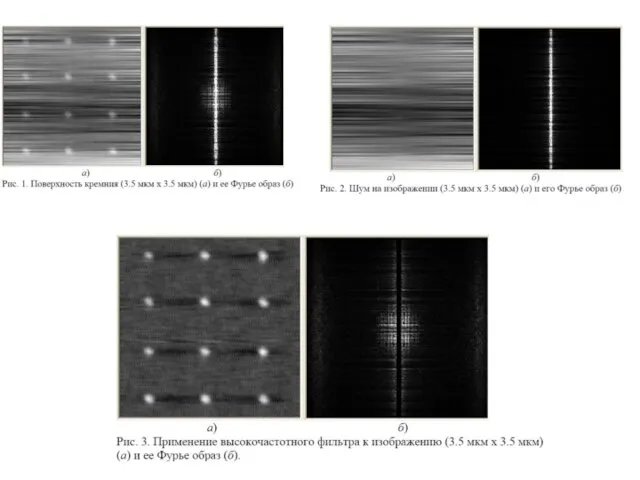
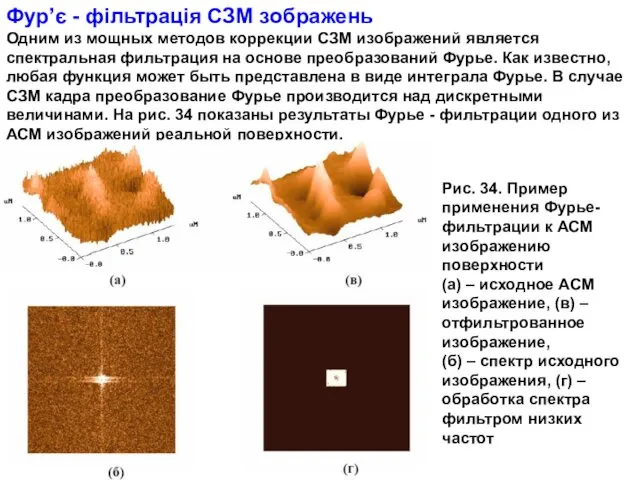
- 60. Фур’є - фільтрація СЗМ зображень Одним из мощных методов коррекции СЗМ изображений является спектральная фильтрация на
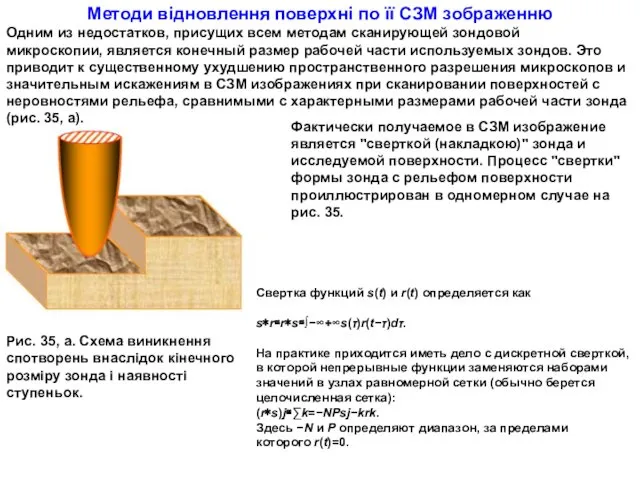
- 61. Методи відновлення поверхні по її СЗМ зображенню Одним из недостатков, присущих всем методам сканирующей зондовой микроскопии,
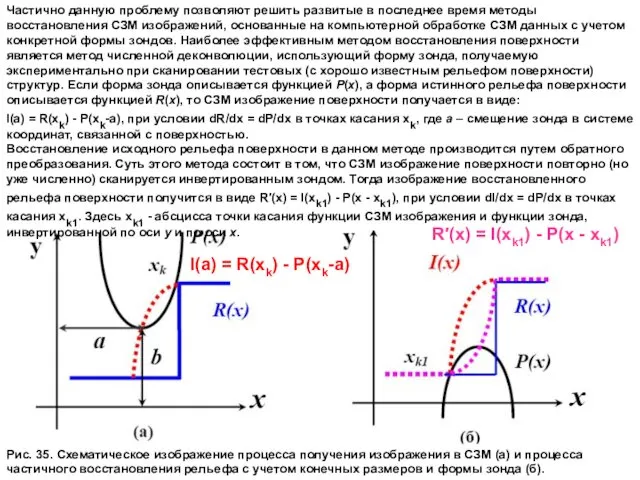
- 62. Частично данную проблему позволяют решить развитые в последнее время методы восстановления СЗМ изображений, основанные на компьютерной
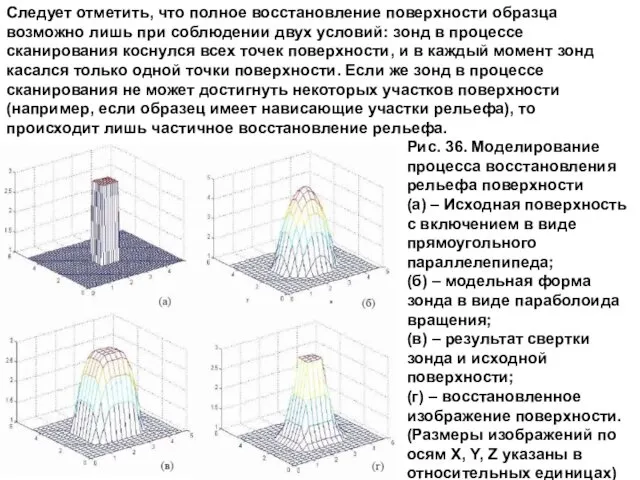
- 63. Следует отметить, что полное восстановление поверхности образца возможно лишь при соблюдении двух условий: зонд в процессе
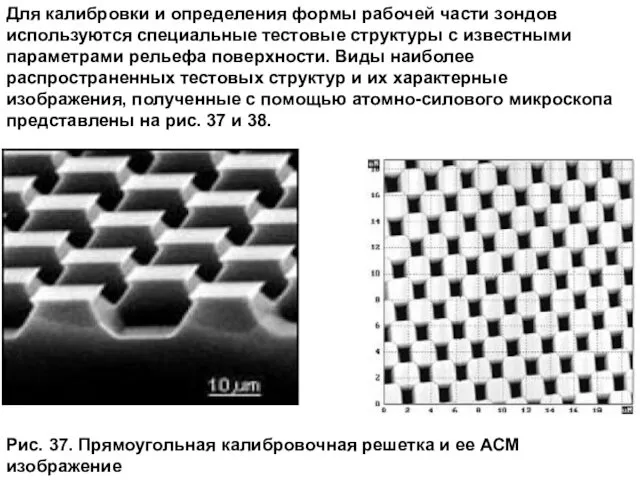
- 64. Для калибровки и определения формы рабочей части зондов используются специальные тестовые структуры с известными параметрами рельефа
- 65. Рис. 38. Калибровочная решетка в виде острых шипов и ее АСМ изображение с помощью зонда пирамидальной
- 67. Скачать презентацию
Неруйнівний контроль
Неруйнівний контроль (скорочено НК) — контроль властивостей і параметрів об'єкта,
Неруйнівний контроль
Неруйнівний контроль (скорочено НК) — контроль властивостей і параметрів об'єкта,
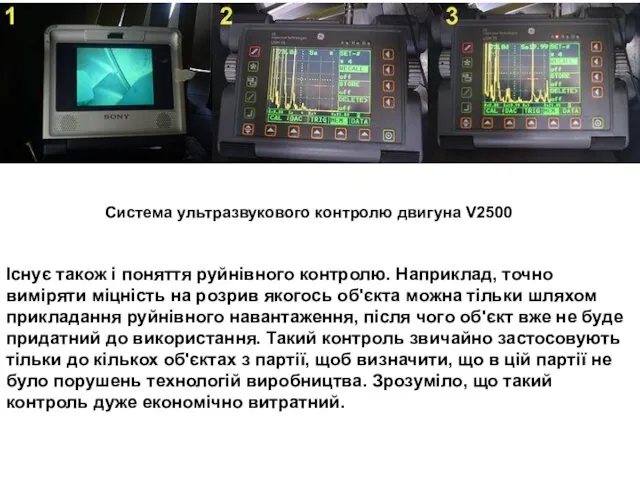
Існує також і поняття руйнівного контролю. Наприклад, точно виміряти міцність на
Існує також і поняття руйнівного контролю. Наприклад, точно виміряти міцність на
Види НК
Акустичний контроль
Вихрострумовий контроль
Радіохвильовий контроль
Радіаційний контроль
Електричний контроль
Тепловий контроль
Оптичний контроль
Газорозрядна візуалізація
Органолептичний контроль
Візуальний
Види НК
Акустичний контроль
Вихрострумовий контроль
Радіохвильовий контроль
Радіаційний контроль
Електричний контроль
Тепловий контроль
Оптичний контроль
Газорозрядна візуалізація
Органолептичний контроль
Візуальний
ОСНОВИ
скануючої зондової
мікроскопії
ОСНОВИ
скануючої зондової
мікроскопії

НАВЧАЛЬНО-МЕТОДИЧНІ МАТЕРІАЛИ
ОСНОВНІ
1. В.Л. Миронов "Основы сканирующей зондовой микроскопии: Учебное пособие для
НАВЧАЛЬНО-МЕТОДИЧНІ МАТЕРІАЛИ
ОСНОВНІ
1. В.Л. Миронов "Основы сканирующей зондовой микроскопии: Учебное пособие для
ДОДАТКОВІ
1. G.Binnig, C.F.Quate, Ch.Gerber Atomic force microscope. // Phys. Rev. Lett.,
ДОДАТКОВІ
1. G.Binnig, C.F.Quate, Ch.Gerber Atomic force microscope. // Phys. Rev. Lett.,

СВІТЛОВІ МІКРОСКОПИ
Разрешение оптических приборов принципиально ограничено дифракциейРазрешение оптических приборов принципиально ограничено дифракцией на объективеРазрешение оптических
СВІТЛОВІ МІКРОСКОПИ
Разрешение оптических приборов принципиально ограничено дифракциейРазрешение оптических приборов принципиально ограничено дифракцией на объективеРазрешение оптических

ЕЛЕКТРОННІ МІКРОСКОПИ
ПРОСВІЧУЮЧІ-
РОЗДІЛЬНА ЗДАТНІСТЬ~ 0,1 нм
РАСТРОВІ-
ДІАМЕТР ПУЧКА ~ 5 нм
8
λ =
ЕЛЕКТРОННІ МІКРОСКОПИ
ПРОСВІЧУЮЧІ-
РОЗДІЛЬНА ЗДАТНІСТЬ~ 0,1 нм
РАСТРОВІ-
ДІАМЕТР ПУЧКА ~ 5 нм
8
λ =

ЕЛЕКТРОННО-МІКРОСКОПІЧНІ ЗОБРАЖЕННЯ ЖГУТИКОВИХ БАКТЕРІЙ
ЕЛЕКТРОННО-МІКРОСКОПІЧНІ ЗОБРАЖЕННЯ ЖГУТИКОВИХ БАКТЕРІЙ
Тема I. Техніка скануючої зондової мікроскопії
Тема I. Техніка скануючої зондової мікроскопії

1.1. Принципи роботи скануючих зондових мікроскопів
Скануючий тунельний мікроскоп (СТМ )
1.1. Принципи роботи скануючих зондових мікроскопів
Скануючий тунельний мікроскоп (СТМ )
Система зворотнього зв ’ язку підтримує значення параметра Р
Система зворотнього зв ’ язку підтримує значення параметра Р
ТЕНЗОР
ТЕНЗОР в математике - величина, обладающая компонентами в каждой из заданного
ТЕНЗОР ТЕНЗОР в математике - величина, обладающая компонентами в каждой из заданного
1.2. Скануючі елементи (сканери) зондових мікроскопів
Рис. 2. Пластина із п’зокераміки в
1.2. Скануючі елементи (сканери) зондових мікроскопів
Рис. 2. Пластина із п’зокераміки в
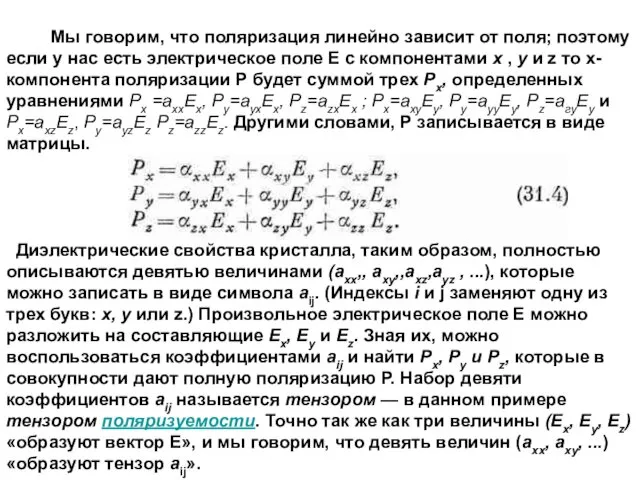
Мы говорим, что поляризация линейно зависит от поля; поэтому если
Мы говорим, что поляризация линейно зависит от поля; поэтому если
Скануючі елементи (сканери) зондових мікроскопів
Рис. 3. Трубчастий п’єзоелемент
Uxx = Δx /
Скануючі елементи (сканери) зондових мікроскопів
Рис. 3. Трубчастий п’єзоелемент
Uxx = Δx /

Скануючі елементи (сканери) зондових микроскопів
Рис. 4. Сканучий елемент у вигляді трипода,
Скануючі елементи (сканери) зондових микроскопів
Рис. 4. Сканучий елемент у вигляді трипода,
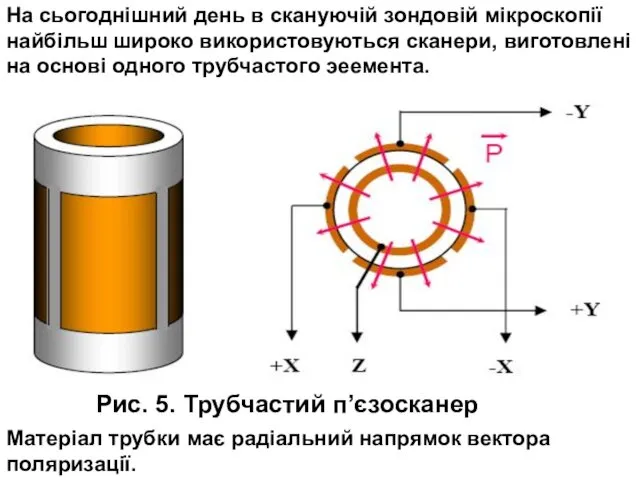
На сьогоднішний день в скануючій зондовій мікроскопії найбільш широко використовуються сканери,
На сьогоднішний день в скануючій зондовій мікроскопії найбільш широко використовуються сканери,
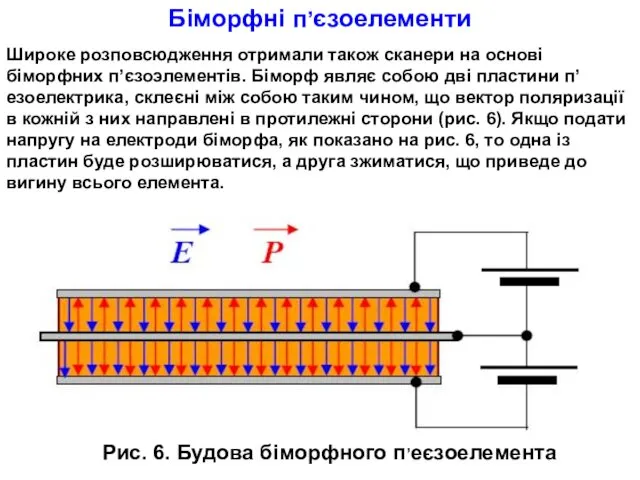
Широке розповсюдження отримали також сканери на основі біморфних п’єзоэлементів. Біморф являє
Широке розповсюдження отримали також сканери на основі біморфних п’єзоэлементів. Біморф являє
Трипод
Поєднуючи три біморфних елементи в одній конструкції,можна реалізувати трипод на
Трипод
Поєднуючи три біморфних елементи в одній конструкції,можна реалізувати трипод на
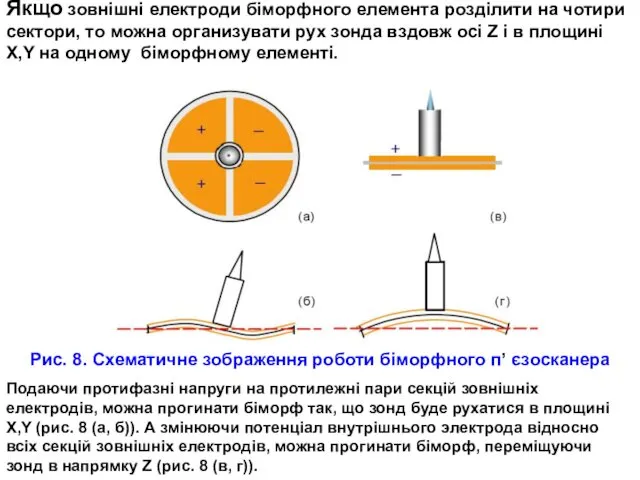
Якщо зовнішні електроди біморфного елемента розділити на чотири сектори, то можна
Якщо зовнішні електроди біморфного елемента розділити на чотири сектори, то можна
НЕДОЛІКИ П’ЄЗОКЕРАМІКИ
Нелінійність п’єзокераміки
В загальному випадку, деформація п’єзокераміки є складною функцією зовнішнього
НЕДОЛІКИ П’ЄЗОКЕРАМІКИ
Нелінійність п’єзокераміки
В загальному випадку, деформація п’єзокераміки є складною функцією зовнішнього
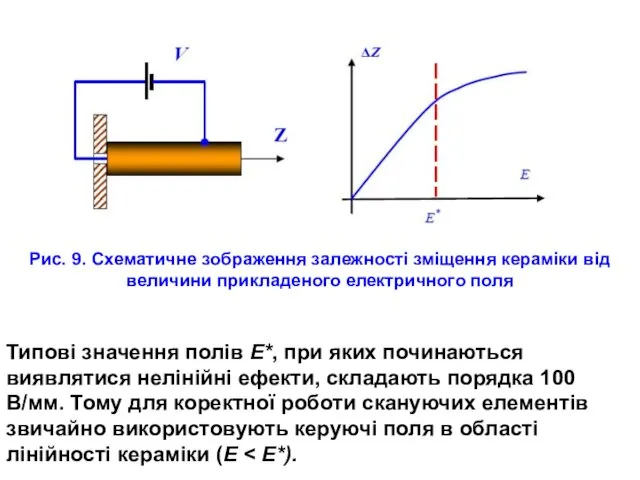
Типові значення полів E*, при яких починаються виявлятися нелінійні ефекти, складають
Типові значення полів E*, при яких починаються виявлятися нелінійні ефекти, складають
Крип п’єзокераміки
Іншим недолікоатком п’єзокераміки является є так званий крип (creep
Крип п’єзокераміки
Іншим недолікоатком п’єзокераміки является є так званий крип (creep
Наявність крипу призводить до того, що в СЗМ зображеннях спостерігаються геометричні
Наявність крипу призводить до того, що в СЗМ зображеннях спостерігаються геометричні
Гістерезис п’єзокераміки
Ще одним недоліком п’єезокерамік є неоднозначність залежностей видовження від напрямку
Гістерезис п’єзокераміки
Ще одним недоліком п’єезокерамік є неоднозначність залежностей видовження від напрямку
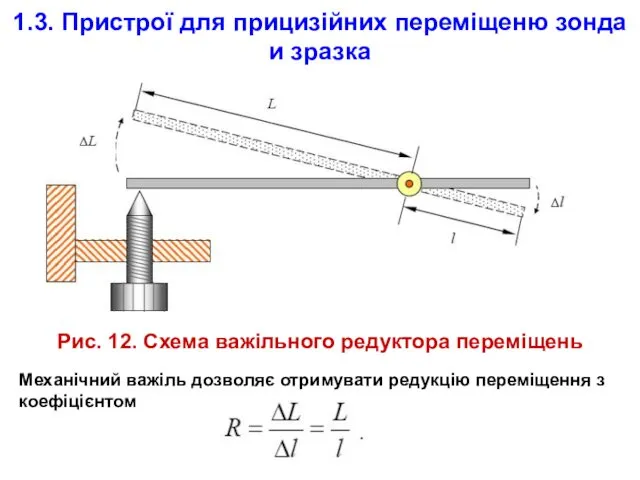
1.3. Пристрої для прицизійних переміщеню зонда и зразка
Рис. 12. Схема важільного
1.3. Пристрої для прицизійних переміщеню зонда и зразка
Рис. 12. Схема важільного
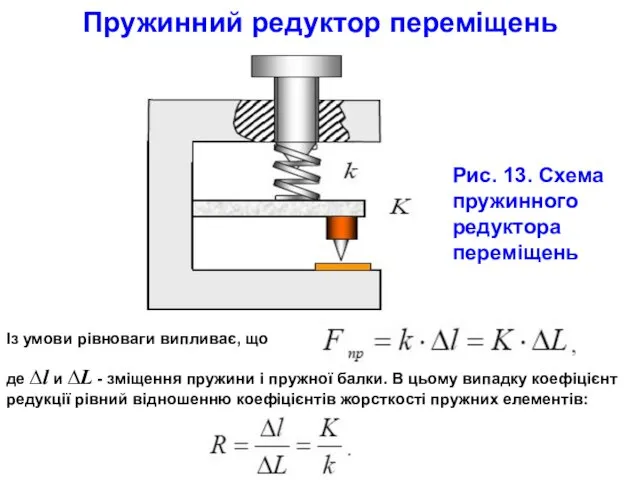
Пружинний редуктор переміщень
Із умови рівноваги випливає, що
де ∆l и ∆L -
Пружинний редуктор переміщень
Із умови рівноваги випливає, що
де ∆l и ∆L -

Крокові електродвигуни
Найбільш просту конструкцію мають двигуни з постійними магнітами.
Вони складаються із
Крокові електродвигуни
Найбільш просту конструкцію мають двигуни з постійними магнітами.
Вони складаються із
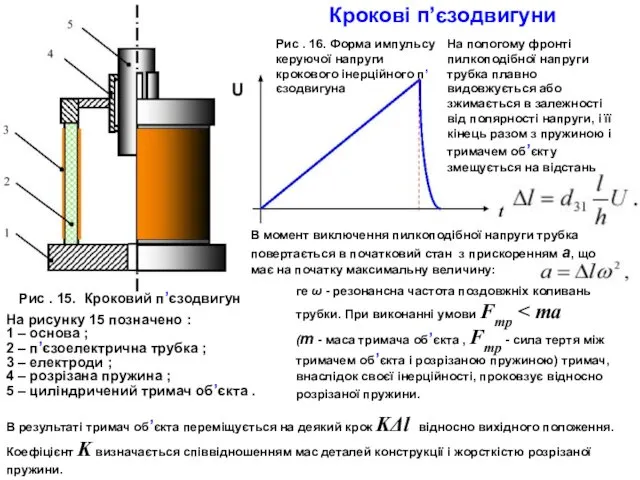
Крокові п’єзодвигуни
На рисунку 15 позначено :
1 – основа ;
2 – п’єзоелектрична
Крокові п’єзодвигуни
На рисунку 15 позначено :
1 – основа ;
2 – п’єзоелектрична
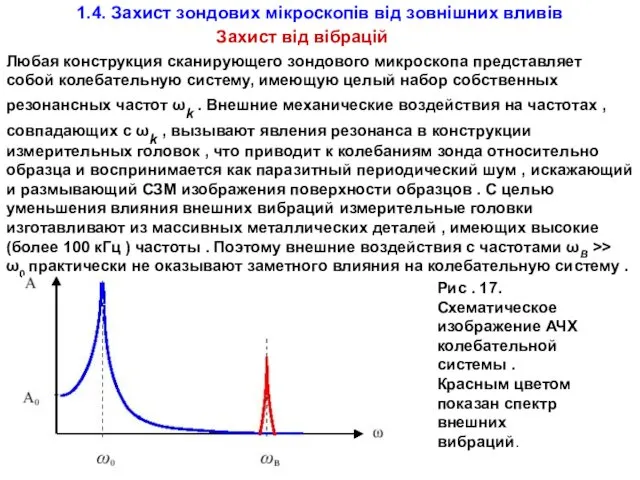
1.4. Захист зондових мікроскопів від зовнішних вливів
Захист від вібрацій
Любая конструкция сканирующего
1.4. Захист зондових мікроскопів від зовнішних вливів
Захист від вібрацій
Любая конструкция сканирующего
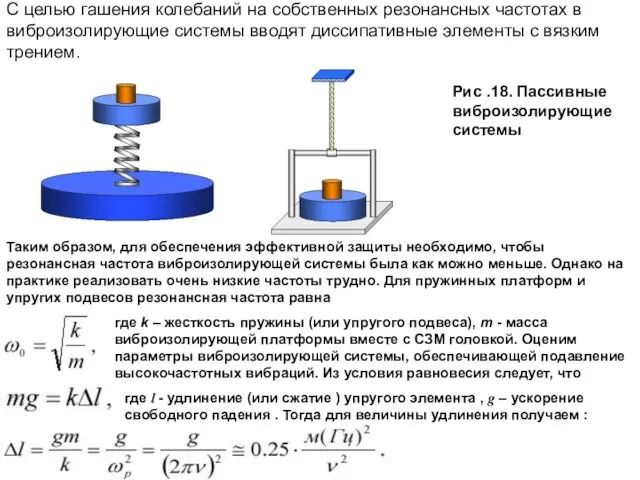
С целью гашения колебаний на собственных резонансных частотах в виброизолирующие системы
С целью гашения колебаний на собственных резонансных частотах в виброизолирующие системы
Таким образом, для получения резонансной частоты виброизолирующей системы порядка 1 Гц
Таким образом, для получения резонансной частоты виброизолирующей системы порядка 1 Гц
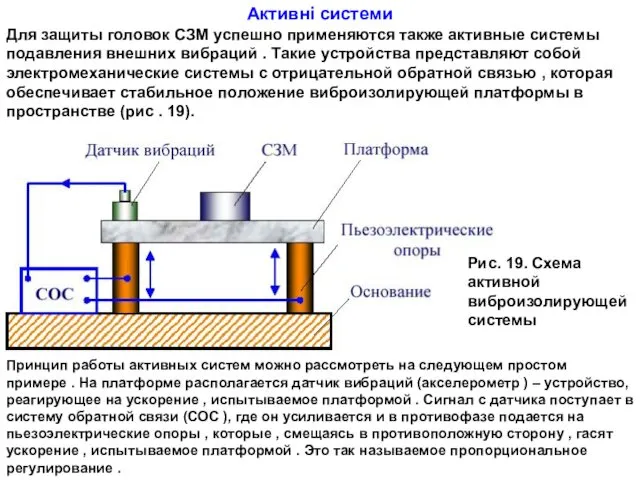
Для защиты головок СЗМ успешно применяются также активные системы подавления внешних
Для защиты головок СЗМ успешно применяются также активные системы подавления внешних
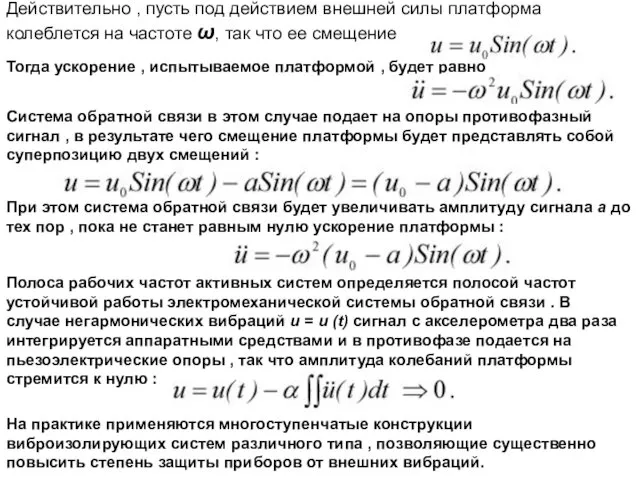
Действительно , пусть под действием внешней силы платформа
колеблется на частоте ω,
Действительно , пусть под действием внешней силы платформа колеблется на частоте ω,

Захист від акустичних шумів
Рис . 20. Защита СЗМ от акустических шумов
Особенностью
Захист від акустичних шумів
Рис . 20. Защита СЗМ от акустических шумов
Особенностью
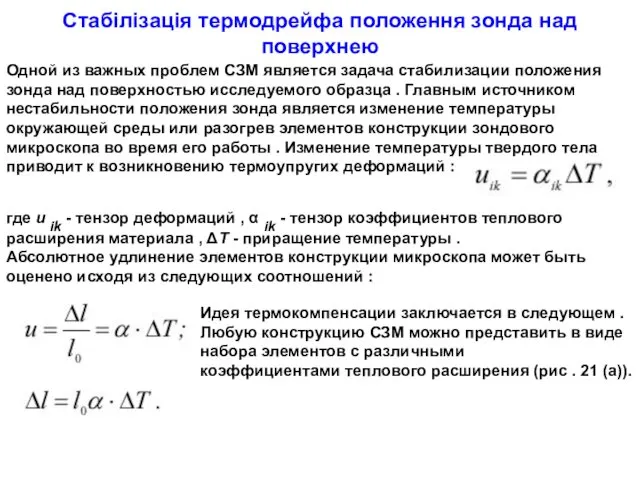
Стабілізація термодрейфа положення зонда над поверхнею
Одной из важных проблем СЗМ является
Стабілізація термодрейфа положення зонда над поверхнею
Одной из важных проблем СЗМ является
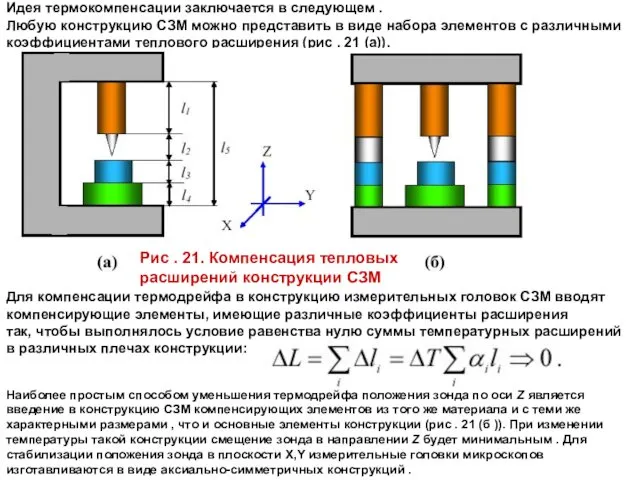
Идея термокомпенсации заключается в следующем .
Любую конструкцию СЗМ можно представить в
Идея термокомпенсации заключается в следующем . Любую конструкцию СЗМ можно представить в
1.5. Формування і обробка СЗМ зображень
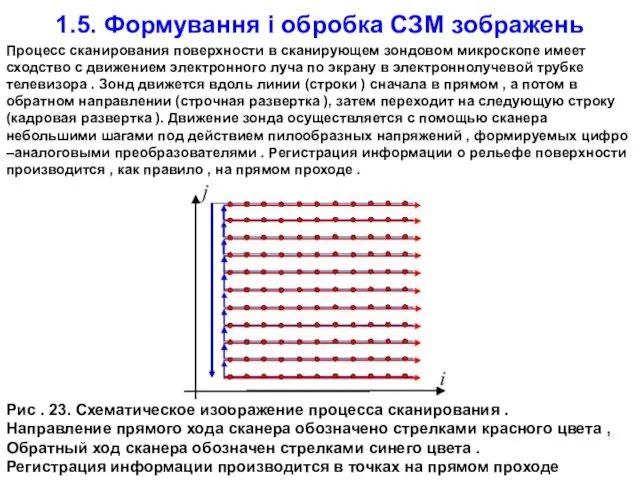
Процесс сканирования поверхности в сканирующем зондовом
1.5. Формування і обробка СЗМ зображень
Процесс сканирования поверхности в сканирующем зондовом
j
Информация , полученная с помощью сканирующего зондового микроскопа, хранится в
j
Информация , полученная с помощью сканирующего зондового микроскопа, хранится в
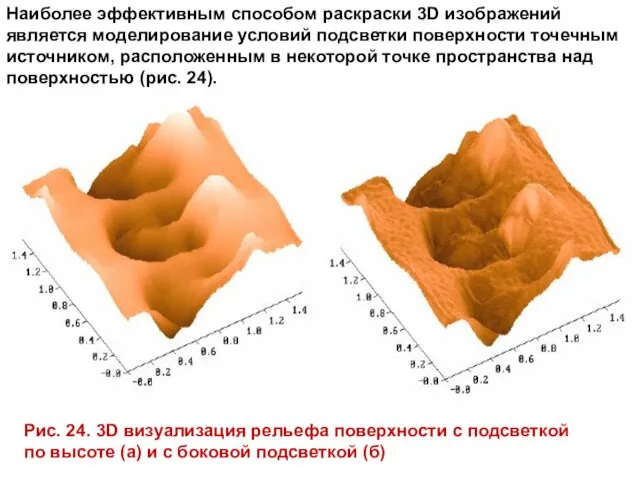
Рис. 24. 3D визуализация рельефа поверхности с подсветкой по высоте (а)
Рис. 24. 3D визуализация рельефа поверхности с подсветкой по высоте (а)
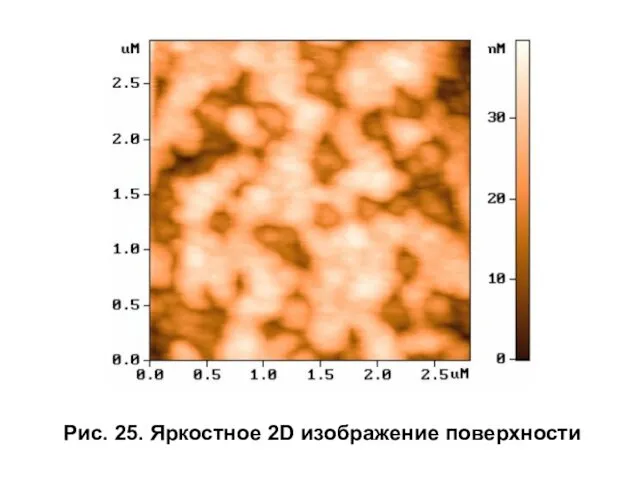
Рис. 25. Яркостное 2D изображение поверхности
Рис. 25. Яркостное 2D изображение поверхности
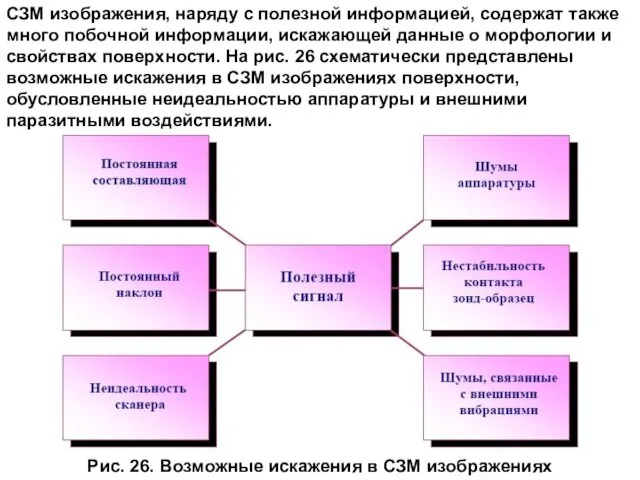
СЗМ изображения, наряду с полезной информацией, содержат также много побочной информации,
СЗМ изображения, наряду с полезной информацией, содержат также много побочной информации,
Віднімання постійної складової
СЗМ изображения, как правило, содержат постоянную составляющую, которая
Віднімання постійної складової
СЗМ изображения, как правило, содержат постоянную составляющую, которая
Для устранения данного недостатка производят операцию вычитания постоянного наклона. Для этого
Для устранения данного недостатка производят операцию вычитания постоянного наклона. Для этого
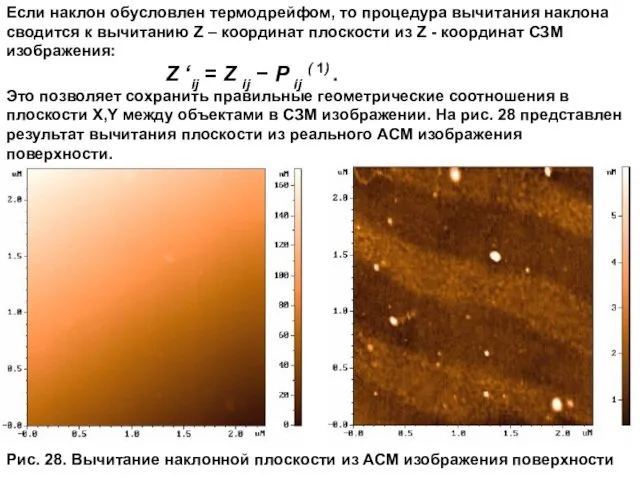
Если наклон обусловлен термодрейфом, то процедура вычитания наклона сводится к вычитанию
Если наклон обусловлен термодрейфом, то процедура вычитания наклона сводится к вычитанию
Ліквідація спотворень, пов’язаних з неідеальністю сканера
Неидеальность свойств пьезосканера приводит к тому,
Ліквідація спотворень, пов’язаних з неідеальністю сканера
Неидеальность свойств пьезосканера приводит к тому,
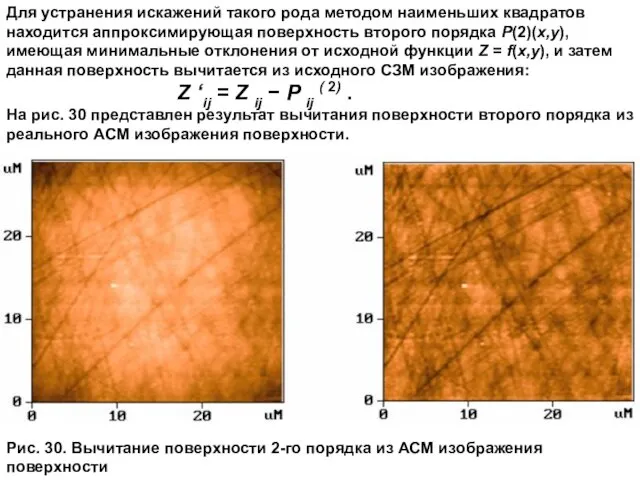
Для устранения искажений такого рода методом наименьших квадратов
находится аппроксимирующая поверхность второго
Для устранения искажений такого рода методом наименьших квадратов
находится аппроксимирующая поверхность второго
Фільтрація СЗМ зображень
Шумы аппаратуры (в основном, это шумы высокочувствительных входных
усилителей), нестабильности
Фільтрація СЗМ зображень
Шумы аппаратуры (в основном, это шумы высокочувствительных входных
усилителей), нестабильности
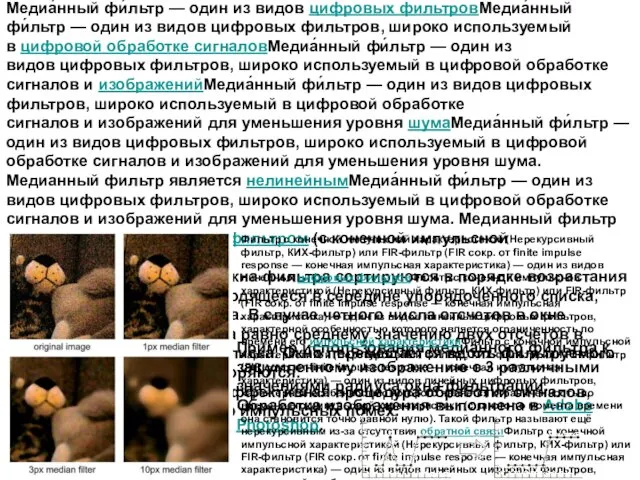
Медиа́нный фи́льтр — один из видов цифровых фильтровМедиа́нный фи́льтр — один из видов цифровых фильтров,
Медиа́нный фи́льтр — один из видов цифровых фильтровМедиа́нный фи́льтр — один из видов цифровых фильтров,
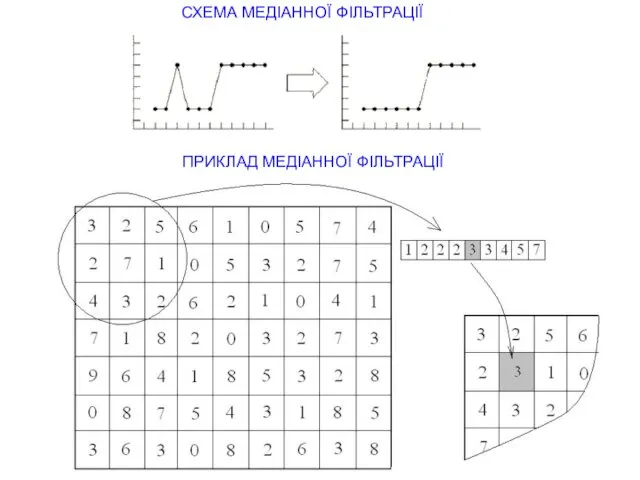
СХЕМА МЕДІАННОЇ ФІЛЬТРАЦІЇ
ПРИКЛАД МЕДІАННОЇ ФІЛЬТРАЦІЇ
СХЕМА МЕДІАННОЇ ФІЛЬТРАЦІЇ
ПРИКЛАД МЕДІАННОЇ ФІЛЬТРАЦІЇ
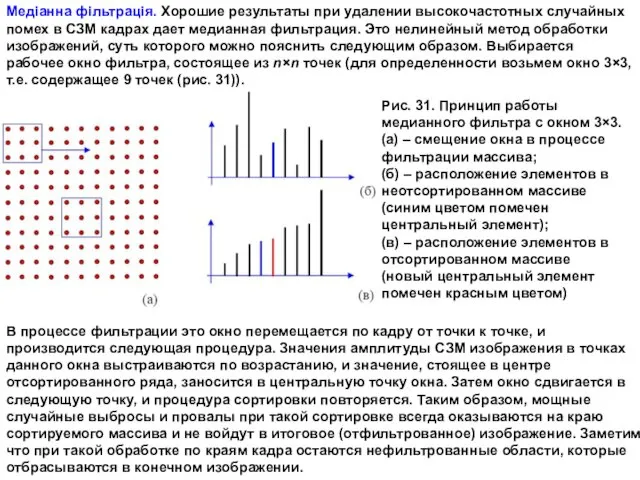
Медіанна фільтрація. Хорошие результаты при удалении высокочастотных случайных помех в СЗМ
Медіанна фільтрація. Хорошие результаты при удалении высокочастотных случайных помех в СЗМ
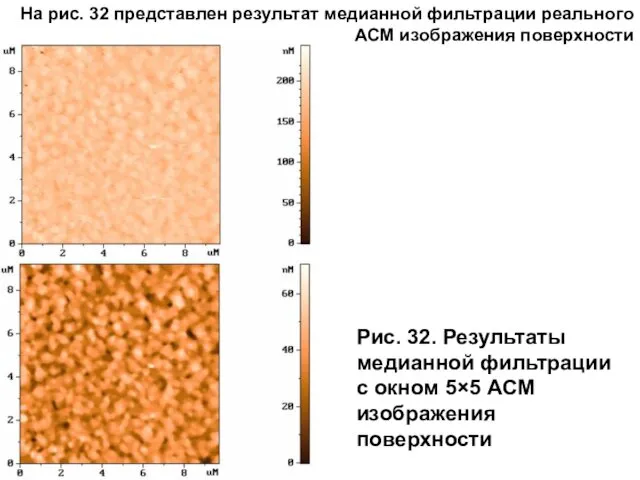
На рис. 32 представлен результат медианной фильтрации реального АСМ изображения поверхности
Рис.
На рис. 32 представлен результат медианной фильтрации реального АСМ изображения поверхности
Рис.
Усереднення по рядках
Процесс сканирования поверхности в сканирующем зондовом микроскопе
происходит таким образом,
Усереднення по рядках
Процесс сканирования поверхности в сканирующем зондовом микроскопе
происходит таким образом,
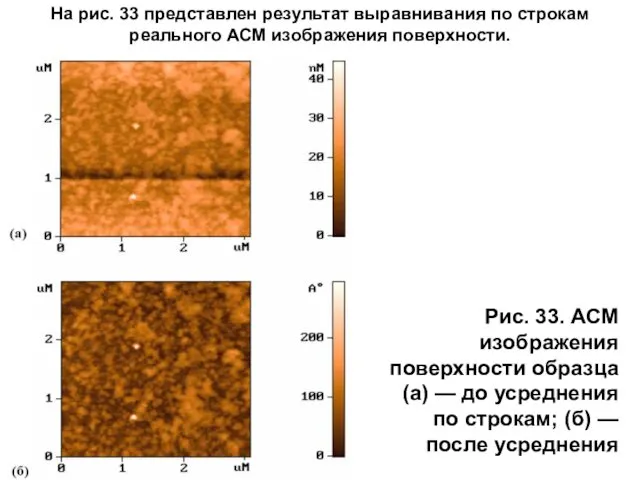
На рис. 33 представлен результат выравнивания по строкам реального АСМ изображения
На рис. 33 представлен результат выравнивания по строкам реального АСМ изображения
Преобразование Фурье. Линейная фильтрация в частотной области
Линейная фильтрация изображений может осуществляться
Преобразование Фурье. Линейная фильтрация в частотной области
Линейная фильтрация изображений может осуществляться
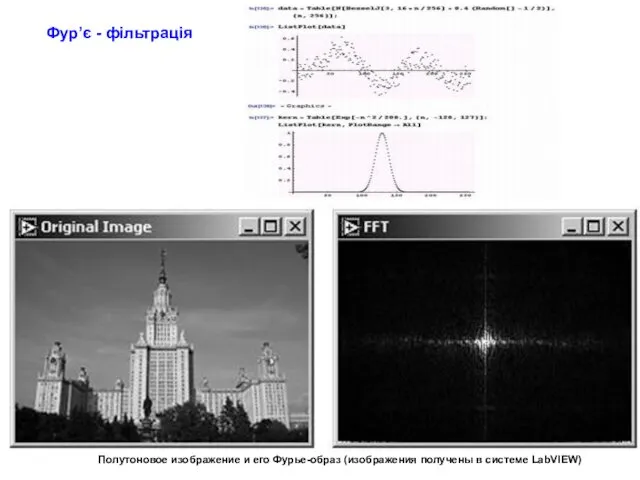
Полутоновое изображение и его Фурье-образ (изображения получены в системе LabVIEW)
Фур’є -
Полутоновое изображение и его Фурье-образ (изображения получены в системе LabVIEW)
Фур’є -
Фур’є - фільтрація СЗМ зображень
Одним из мощных методов коррекции СЗМ изображений
Фур’є - фільтрація СЗМ зображень
Одним из мощных методов коррекции СЗМ изображений
Методи відновлення поверхні по її СЗМ зображенню
Одним из недостатков, присущих всем
Методи відновлення поверхні по її СЗМ зображенню
Одним из недостатков, присущих всем
Частично данную проблему позволяют решить развитые в последнее время методы восстановления
Частично данную проблему позволяют решить развитые в последнее время методы восстановления
Следует отметить, что полное восстановление поверхности образца возможно лишь при соблюдении
Следует отметить, что полное восстановление поверхности образца возможно лишь при соблюдении
Для калибровки и определения формы рабочей части зондов используются специальные тестовые
Для калибровки и определения формы рабочей части зондов используются специальные тестовые
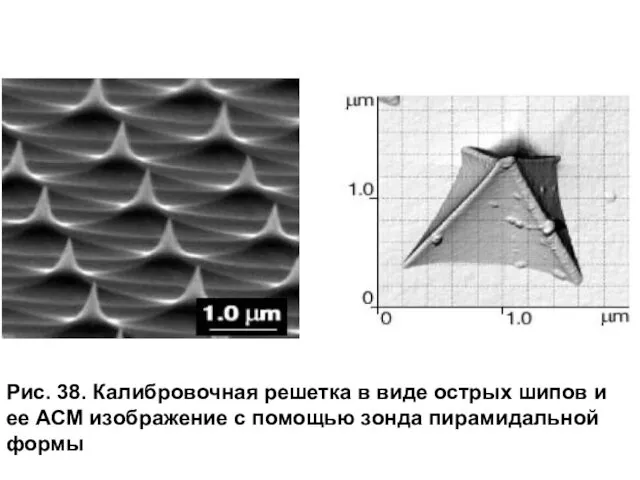
Рис. 38. Калибровочная решетка в виде острых шипов и ее АСМ
Рис. 38. Калибровочная решетка в виде острых шипов и ее АСМ
 Разработка урока на тему : Плотность вещества
Разработка урока на тему : Плотность вещества Жұқа қабыршақ (ұлпалардағы) интерференция. Бірдей қалыңдықтағы жолақтар. Интерференция құбылысының өндірісте қолдануы
Жұқа қабыршақ (ұлпалардағы) интерференция. Бірдей қалыңдықтағы жолақтар. Интерференция құбылысының өндірісте қолдануы Решение задач на дифракцию света
Решение задач на дифракцию света Задачи обнаружения и оценивания параметров сигналов
Задачи обнаружения и оценивания параметров сигналов Колесо с резиновыми спицами
Колесо с резиновыми спицами Формирование навыков смыслового чтения и работы с текстом на уроках физики (Часть2)
Формирование навыков смыслового чтения и работы с текстом на уроках физики (Часть2) Радиоактивное излучение и использование ядерной энергии
Радиоактивное излучение и использование ядерной энергии Презентация Силы в природе
Презентация Силы в природе X6000电器系统布置培训. Обучение компоновке электрической системы X6000
X6000电器系统布置培训. Обучение компоновке электрической системы X6000 Решение задач на расчёт количества теплоты, необходимого для нагревания тела или выделяемого им при охлаждении
Решение задач на расчёт количества теплоты, необходимого для нагревания тела или выделяемого им при охлаждении Геофизические исследования скважин (ГИС). Методы каротажа
Геофизические исследования скважин (ГИС). Методы каротажа Нормирование точности поверхностей деталей машин по взаимному расположению, обозначения их на чертежах
Нормирование точности поверхностей деталей машин по взаимному расположению, обозначения их на чертежах Небесное и земное в звуках и красках
Небесное и земное в звуках и красках Свойства кристаллов
Свойства кристаллов Функциональная оптоэлектроника. УФЭ (6)
Функциональная оптоэлектроника. УФЭ (6) Экзамен ПМ 01. Билет № 11. Устройства для работы на высоте
Экзамен ПМ 01. Билет № 11. Устройства для работы на высоте Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Световые кванты. Решение задач
Световые кванты. Решение задач Динамика материальной точки и поступательного движения твердого тела
Динамика материальной точки и поступательного движения твердого тела Интеллектуальный Конкурс Знатоки
Интеллектуальный Конкурс Знатоки Устройство рам, мостов и подвески
Устройство рам, мостов и подвески презентация к уроку физики в 8 классе Плавление и кристаллизация
презентация к уроку физики в 8 классе Плавление и кристаллизация Презентация Проектное обучение
Презентация Проектное обучение Изобретени радио А.С. Поповым
Изобретени радио А.С. Поповым Изучение конструкций и методов расчета подъемно-транспортных машин
Изучение конструкций и методов расчета подъемно-транспортных машин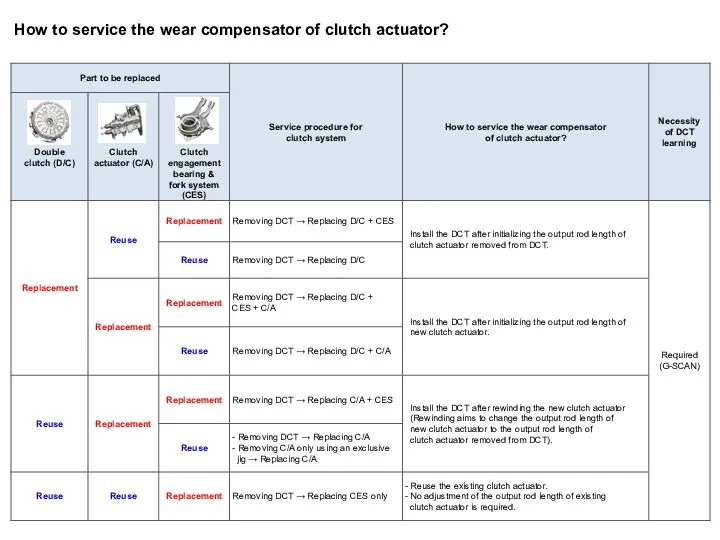 How to service the wear compensator of clutch actuator
How to service the wear compensator of clutch actuator Химия функциональных материалов. Материалы используемые для электротехники
Химия функциональных материалов. Материалы используемые для электротехники Якорное устройство. Тема 8
Якорное устройство. Тема 8