- Модели простых сплошных сред

Содержание
- 2. Под простыми моделями сплошных сред понимаются идеализированные представления реальных деформируемых сред, учитывающие какое-либо одно из основных
- 3. Построение модели сплошной среды заключается в составлении такой замкнутой системы уравнений и соотношений, которая бы описывала
- 4. Постановка любой задачи механики сплошных сред включает следующие пять этапов: — выбор системы отсчета и системы
- 5. Для формирования модели сплошной среды необходимо: выбрать систему отсчета и систему координат, по отношению к которым
- 6. Система исходных уравнений Система исходных уравнений – это замкнутая система уравнений и соотношений, которая полностью описывает
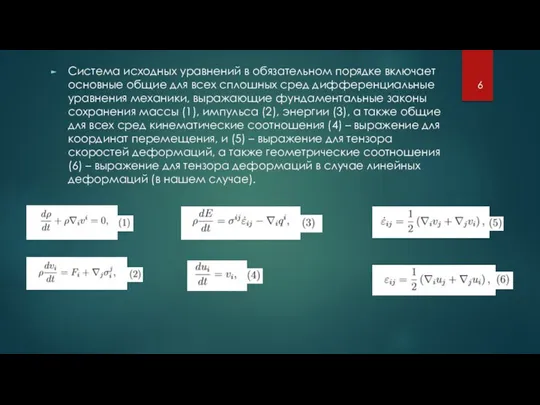
- 7. Система исходных уравнений в обязательном порядке включает основные общие для всех сплошных сред дифференциальные уравнения механики,
- 8. Индивидуальные особенности рассматриваемой деформируемой среды в отношении оказания сопротивления деформированию учитываются физическими соотношениями (7), обязательно включаемыми
- 9. Начальные и граничные условия. Неотъемлемым и важнейшим элементом постановки любой задачи механики сплошных сред является формулировка
- 10. Плотностью и удельной внутренней энергией при этом порядок производных этих физических величин по времени не превышает
- 11. Более сложным и разнообразным образом при постановке задач механики сплошных сред задаются граничные условия. Граничные условия
- 12. Динамические граничные условия (или граничные условия в напряжениях) задаются, когда на поверхности S действуют поверхностные силы
- 13. Смешанные граничные условия соответствуют случаю, когда на поверхности S задаются значения и кинематических, динамических величин или
- 15. Скачать презентацию
Под простыми моделями сплошных сред понимаются идеализированные представления реальных деформируемых сред,
Под простыми моделями сплошных сред понимаются идеализированные представления реальных деформируемых сред,
Построение модели сплошной среды заключается в составлении такой замкнутой системы уравнений
Построение модели сплошной среды заключается в составлении такой замкнутой системы уравнений
Постановка любой задачи механики сплошных сред включает следующие пять этапов:
— выбор
Постановка любой задачи механики сплошных сред включает следующие пять этапов:
— выбор
Для формирования модели сплошной среды необходимо: выбрать систему отсчета и систему
Для формирования модели сплошной среды необходимо: выбрать систему отсчета и систему
Система исходных уравнений
Система исходных уравнений – это замкнутая система уравнений и
Система исходных уравнений
Система исходных уравнений – это замкнутая система уравнений и
Система исходных уравнений в обязательном порядке включает основные общие для всех
Система исходных уравнений в обязательном порядке включает основные общие для всех
Индивидуальные особенности рассматриваемой деформируемой среды в отношении оказания сопротивления деформированию
Индивидуальные особенности рассматриваемой деформируемой среды в отношении оказания сопротивления деформированию
Начальные и граничные условия. Неотъемлемым и важнейшим элементом постановки любой задачи
Начальные и граничные условия. Неотъемлемым и важнейшим элементом постановки любой задачи
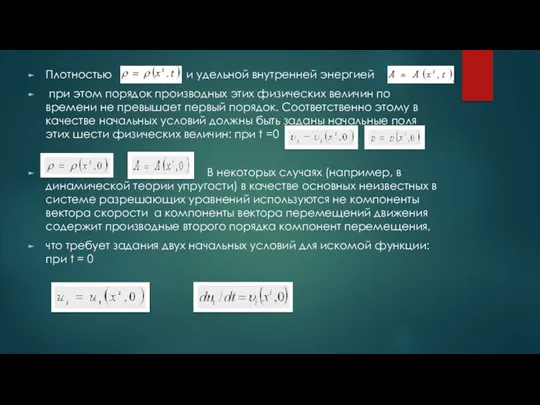
Плотностью и удельной внутренней энергией
при этом порядок производных этих физических
Плотностью и удельной внутренней энергией
при этом порядок производных этих физических
Более сложным и разнообразным образом при постановке задач механики сплошных сред
Более сложным и разнообразным образом при постановке задач механики сплошных сред
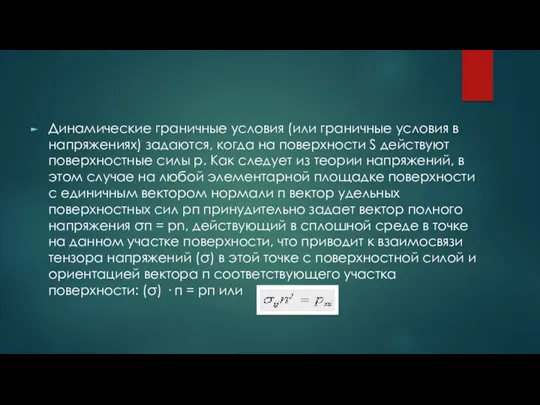
Динамические граничные условия (или граничные условия в напряжениях) задаются, когда на
Динамические граничные условия (или граничные условия в напряжениях) задаются, когда на
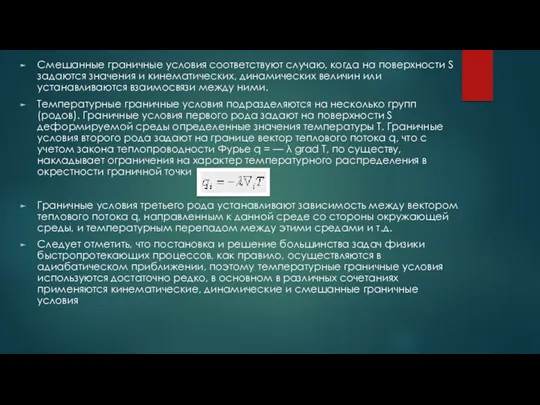
Смешанные граничные условия соответствуют случаю, когда на поверхности S задаются значения
Смешанные граничные условия соответствуют случаю, когда на поверхности S задаются значения
 Закон радиоактивного распада. Период полураспада
Закон радиоактивного распада. Период полураспада Сопротивление материалов
Сопротивление материалов Тогы бар түзу өткізгіштің магнит өрісі. Тогы бар шарғының магнит өрісі
Тогы бар түзу өткізгіштің магнит өрісі. Тогы бар шарғының магнит өрісі Физические свойства природного газа. Фазовое состояние
Физические свойства природного газа. Фазовое состояние Рентгеновские лучи
Рентгеновские лучи Система электроснабжения постоянного тока
Система электроснабжения постоянного тока Проект От опытных фактов – к научной гипотезе или заглядывая вглубь Вселенной
Проект От опытных фактов – к научной гипотезе или заглядывая вглубь Вселенной Master thesis proposal: Development of autonomous underwater vehicle forward velocity controller
Master thesis proposal: Development of autonomous underwater vehicle forward velocity controller Электрический ток в различных средах. Вещества
Электрический ток в различных средах. Вещества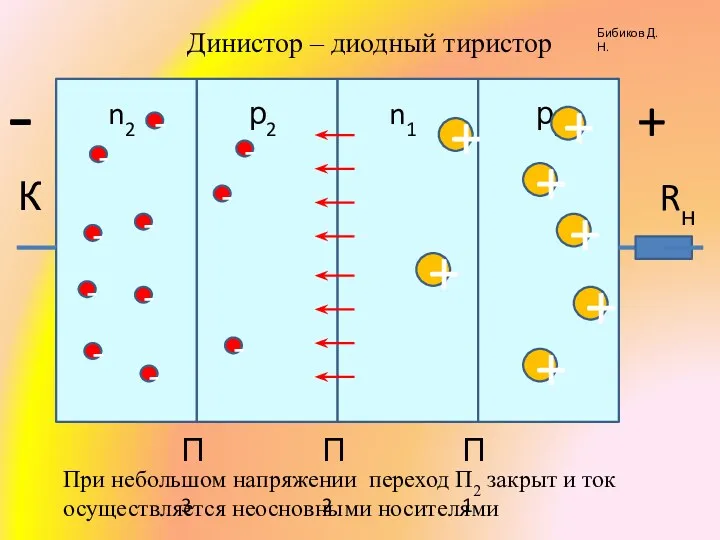 Тиристор
Тиристор СТО с участком диагностики двигателя
СТО с участком диагностики двигателя Распространение колебаний в среде. Волны. Продольные и поперечные волны
Распространение колебаний в среде. Волны. Продольные и поперечные волны Механические свойства горных пород и массивов. Тема 6. Лекция № 9
Механические свойства горных пород и массивов. Тема 6. Лекция № 9 Механические свойства жидкостей и газов
Механические свойства жидкостей и газов Презентация Гелиоцентрическая система мира
Презентация Гелиоцентрическая система мира Атомның кванто- механикалық моделі. Атом орбиталі, квант саны. Атомдардың электрондық конфигурациясы
Атомның кванто- механикалық моделі. Атом орбиталі, квант саны. Атомдардың электрондық конфигурациясы Условия равновесия различных систем сил
Условия равновесия различных систем сил Методы моментов. Метод сферических гармоник. Уравнение переноса в Р1-приближении. Диффузионное приближение
Методы моментов. Метод сферических гармоник. Уравнение переноса в Р1-приближении. Диффузионное приближение Ядерный реактор. Получение радиоактивных изотопов и их применение
Ядерный реактор. Получение радиоактивных изотопов и их применение Эффект Доплера
Эффект Доплера Программа элективного курса по физике 9 класс
Программа элективного курса по физике 9 класс Газовые лазеры
Газовые лазеры Давление твердых тел, жидкостей и газов
Давление твердых тел, жидкостей и газов Связи. Реакции связей
Связи. Реакции связей Строение и основные свойства полупроводников
Строение и основные свойства полупроводников Основы специальной теории относительности
Основы специальной теории относительности Синхронные машины
Синхронные машины Радиометр радона и его дочерних продуктов распада РАМОН-02
Радиометр радона и его дочерних продуктов распада РАМОН-02