Master thesis proposal: Development of autonomous underwater vehicle forward velocity controller презентация
- Master thesis proposal: Development of autonomous underwater vehicle forward velocity controller

Содержание
- 2. UNMANNED UNDERWATER VEHICLES CLASSIFICATION Unmanned Underwater Vehicles Tethered Autonomous Towed Dynamically positioned Forward flying By tether
- 3. REMOTELY OPERATED VEHICLES (DYNAMICALLY POSITIONED) EXAMPLES Seasam ROV Saab Seaeye’s Falcon
- 4. TOWED UNDERWATER VEHICLES EXAMPLE TUV – Shark–S450D
- 5. AUTONOMOUS UNDERWATER VEHICLES (FORWARD FLYING) EXAMPLES Bluefin-21 ECA Group AUV: A27-M Remus-100
- 6. OBJECT OF RESEARCH Autonomous underwater vehicle: forward flying neutrally buoyant carry their own power source carry
- 7. AIM AND TASKS OF THE THESIS AUV main regime: forward motion, which is basic to perform
- 8. METHODS TO SOLVE THE TASKS To fulfill the set of tasks and achieve the given aim
- 10. Скачать презентацию
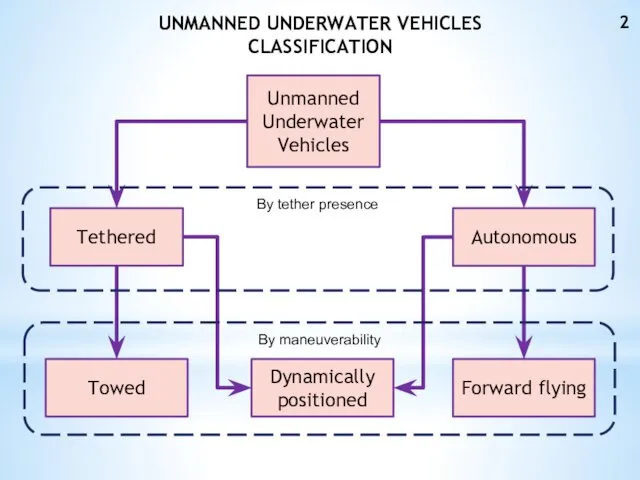
UNMANNED UNDERWATER VEHICLES
CLASSIFICATION
Unmanned Underwater Vehicles
Tethered
Autonomous
Towed
Dynamically positioned
Forward flying
By tether presence
By maneuverability
UNMANNED UNDERWATER VEHICLES
CLASSIFICATION
Unmanned Underwater Vehicles
Tethered
Autonomous
Towed
Dynamically positioned
Forward flying
By tether presence
By maneuverability

REMOTELY OPERATED VEHICLES
(DYNAMICALLY POSITIONED) EXAMPLES
Seasam ROV
Saab Seaeye’s Falcon
REMOTELY OPERATED VEHICLES
(DYNAMICALLY POSITIONED) EXAMPLES
Seasam ROV
Saab Seaeye’s Falcon
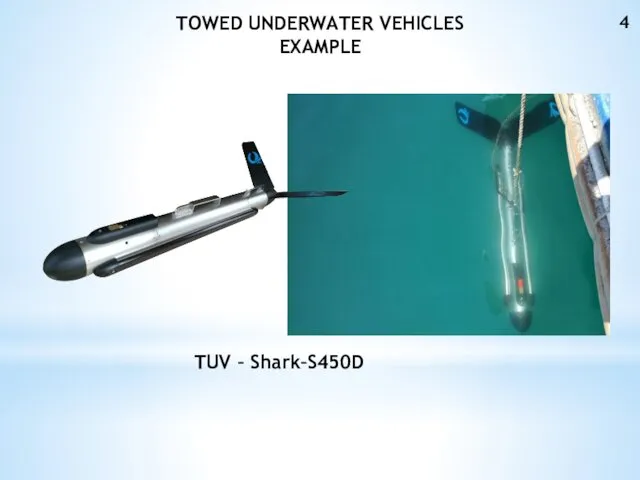
TOWED UNDERWATER VEHICLES
EXAMPLE
TUV – Shark–S450D
TOWED UNDERWATER VEHICLES
EXAMPLE
TUV – Shark–S450D
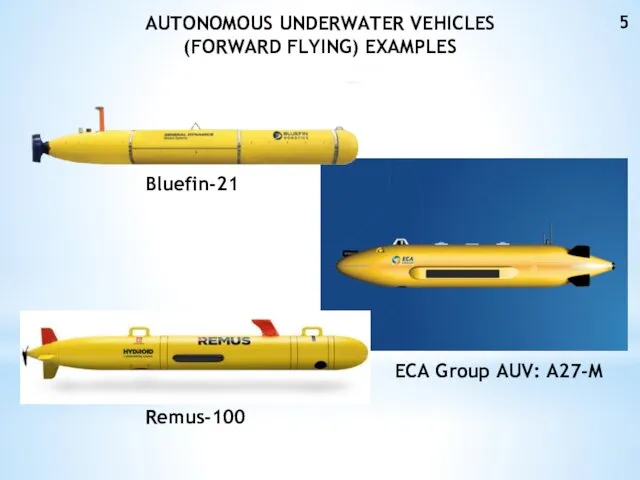
AUTONOMOUS UNDERWATER VEHICLES
(FORWARD FLYING) EXAMPLES
Bluefin-21
ECA Group AUV: A27-M
Remus-100
AUTONOMOUS UNDERWATER VEHICLES
(FORWARD FLYING) EXAMPLES
Bluefin-21
ECA Group AUV: A27-M
Remus-100
OBJECT OF RESEARCH
Autonomous underwater vehicle:
forward flying
neutrally buoyant
carry their own power source
carry
OBJECT OF RESEARCH
Autonomous underwater vehicle:
forward flying
neutrally buoyant
carry their own power source
carry
AIM AND TASKS OF THE THESIS
AUV main regime:
forward motion, which is
AIM AND TASKS OF THE THESIS
AUV main regime:
forward motion, which is
METHODS TO SOLVE THE TASKS
To fulfill the set of tasks and
METHODS TO SOLVE THE TASKS
To fulfill the set of tasks and
 Обобщающий урок по теме Давление, физика, 7 класс
Обобщающий урок по теме Давление, физика, 7 класс Испарение жидкости. Насыщенный и ненасыщенный пар 8 класс
Испарение жидкости. Насыщенный и ненасыщенный пар 8 класс Жарықтандыру және дабылдау
Жарықтандыру және дабылдау Электродный нагрев
Электродный нагрев Werkstoffkunde
Werkstoffkunde Система воздушного охлаждения
Система воздушного охлаждения Атмосферное давление
Атмосферное давление Распиливание и припасовка
Распиливание и припасовка Решение задач по теме Законы Ньютона
Решение задач по теме Законы Ньютона Физика и безопасность дорожного движения /сценарий мероприятия и презентация/
Физика и безопасность дорожного движения /сценарий мероприятия и презентация/ МЭМС и НЭМС датчики
МЭМС и НЭМС датчики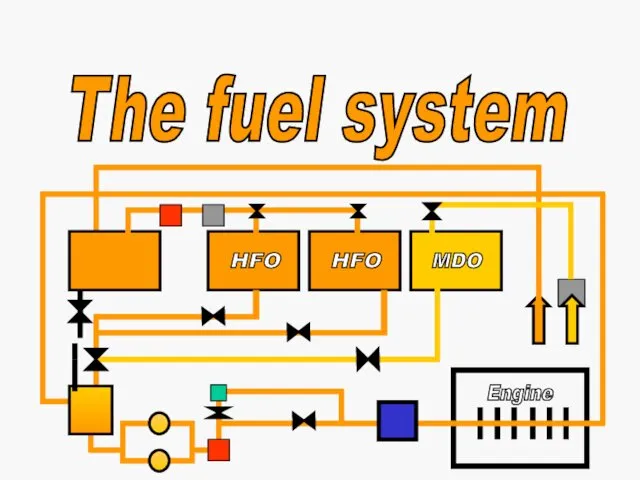 The fuel system
The fuel system Лабораторная работа №19: Наблюдение сплошного и линейчатого спектров различных веществ
Лабораторная работа №19: Наблюдение сплошного и линейчатого спектров различных веществ Лампа накаливания
Лампа накаливания Электромагнитная индукция
Электромагнитная индукция Электропроводность биологических тканей на постоянном токе
Электропроводность биологических тканей на постоянном токе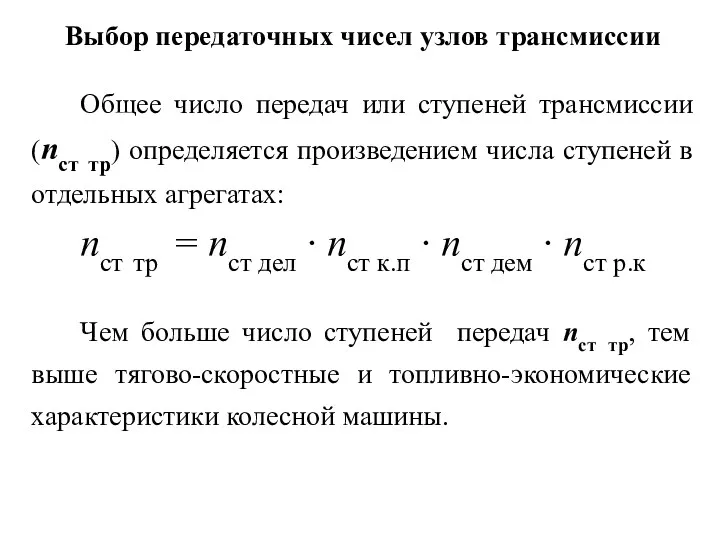 Выбор передаточных чисел узлов трансмиссии. Общее число передач или ступеней трансмиссии. Лекция 14
Выбор передаточных чисел узлов трансмиссии. Общее число передач или ступеней трансмиссии. Лекция 14 Лекция 6: Электромагнитная теория света. Поляризация. Формулы Френеля
Лекция 6: Электромагнитная теория света. Поляризация. Формулы Френеля Электронная спектроскопия
Электронная спектроскопия Температура тел. Шкалы и приборы измерения температуры
Температура тел. Шкалы и приборы измерения температуры Установившееся равномерное движение воды в открытых руслах (каналах)
Установившееся равномерное движение воды в открытых руслах (каналах) Прессконференция ко Дню Космонавтики
Прессконференция ко Дню Космонавтики Основы биореологии и гемодинамики
Основы биореологии и гемодинамики Закон Ома для участка цепи
Закон Ома для участка цепи Эксплуатация оборудования для ТО и ТР приборов бензиновых систем питания автомобилей (урок 18)
Эксплуатация оборудования для ТО и ТР приборов бензиновых систем питания автомобилей (урок 18) Радуга стихотворенье
Радуга стихотворенье Испарение и конденсация
Испарение и конденсация Физические измерения и их величины
Физические измерения и их величины