Обнаружение когерентных сигналов со случайными параметрами. Лекция №7. Часть 1. Теоретические основы радиолокации презентация
- Обнаружение когерентных сигналов со случайными параметрами. Лекция №7. Часть 1. Теоретические основы радиолокации

Содержание
- 2. Раскрыть содержание алгоритма оптимального обнаружения сигналов с полностью известными параметрами, структуру соответствующих устройств и методику оценки
- 3. 1. Отношение правдоподобия и алгоритм одноканального обнаружения сигнала с известными параметрами на фоне квазибелого шума. ВОПРОСЫ
- 4. 1. Отношение правдоподобия и алгоритм одноканального обнаружения сигнала с известными параметрами на фоне квазибелого шума Полагая,
- 5. Отношение правдоподобия для сигнала с полностью известными параметрами Из некоррелированности отдельных дискрет помехи между собой следует,
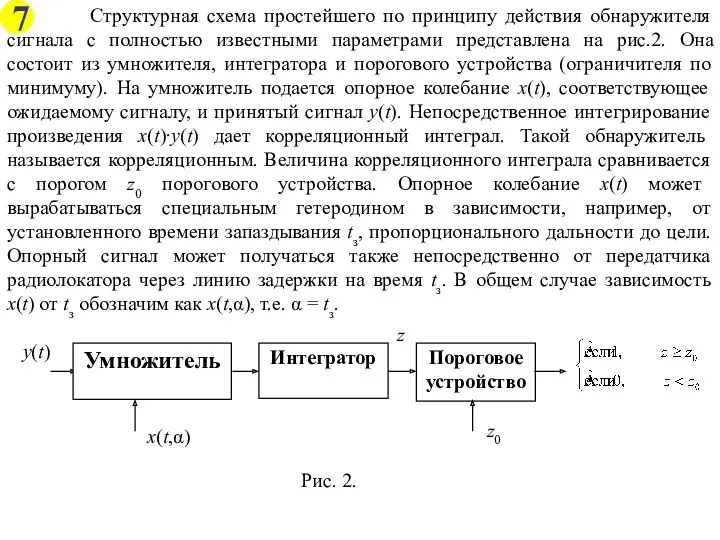
- 6. Из монотонности связи l[y(t)] и Z[y(t)] следует, что сравнение l[y(t)] с порогом l0 эквивалентно сравнению Z[y(t)]
- 7. Иллюстрация формирования корреляционного интеграла Z от времени t Иллюстрация формирования корреляционного интеграла Z от времени t
- 8. Анализ (4) показывает, что для сигнала с полностью известными параметрами отношение правдоподобия является монотонной функцией корреляционного
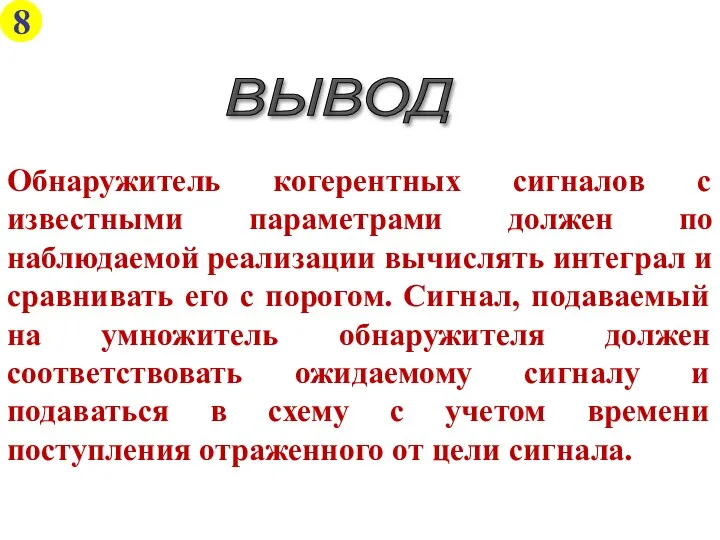
- 9. y(t) z0 z x(t,α) Умножитель Интегратор Пороговое устройство Рис. 2. Структурная схема простейшего по принципу действия
- 10. ВЫВОД Обнаружитель когерентных сигналов с известными параметрами должен по наблюдаемой реализации вычислять интеграл и сравнивать его
- 11. Определим статистические характеристики корреляционного интеграла Полагаем, что шум n(t) распределен по нормальному закону с нулевым математическим
- 12. Дисперсия Z одинакова в отсутствие и при наличии сигнала и равна Корреляционная функция «белого» шума где
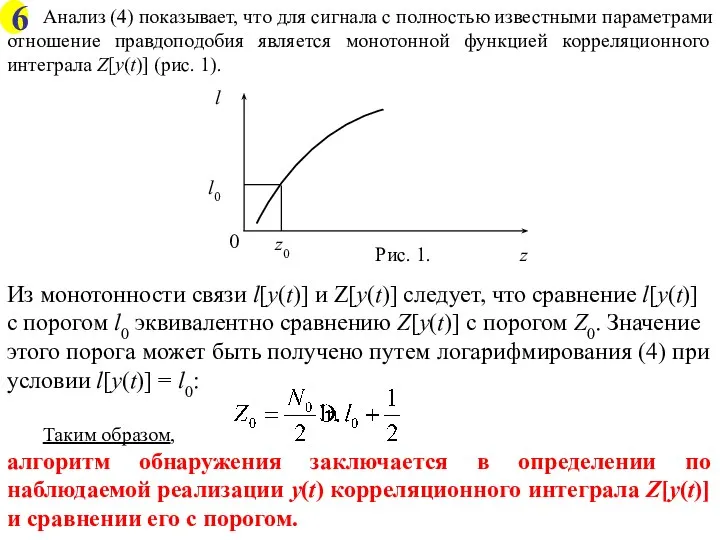
- 13. Если на входе есть и сигнал, и шум, то получаем распределение со средним Кривая Рсп(z) =
- 14. Вводя нормированное значение корреляционного интеграла zн = z/υ0 и учитывая, что Д[zн] = 1, получим (
- 15. - интеграл вероятности. Из уравнения (8) следует, что условная вероятность ложной тревоги определяется только величиной порога
- 16. Задавая F по соотношению (8), определяем q0, а затем, зная q0, с помощью (7) строим графики
- 18. Скачать презентацию
Раскрыть содержание алгоритма оптимального обнаружения сигналов с полностью известными параметрами, структуру
Раскрыть содержание алгоритма оптимального обнаружения сигналов с полностью известными параметрами, структуру
1. Отношение правдоподобия и алгоритм одноканального обнаружения сигнала с известными параметрами
1. Отношение правдоподобия и алгоритм одноканального обнаружения сигнала с известными параметрами
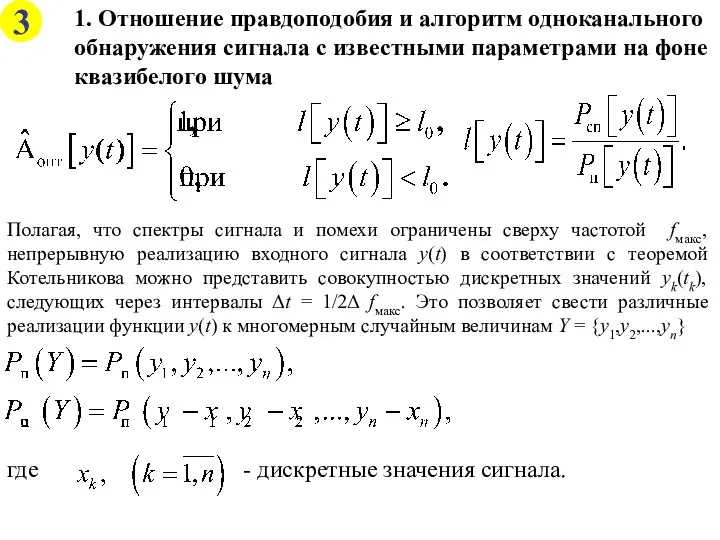
1. Отношение правдоподобия и алгоритм одноканального обнаружения сигнала с известными параметрами
1. Отношение правдоподобия и алгоритм одноканального обнаружения сигнала с известными параметрами
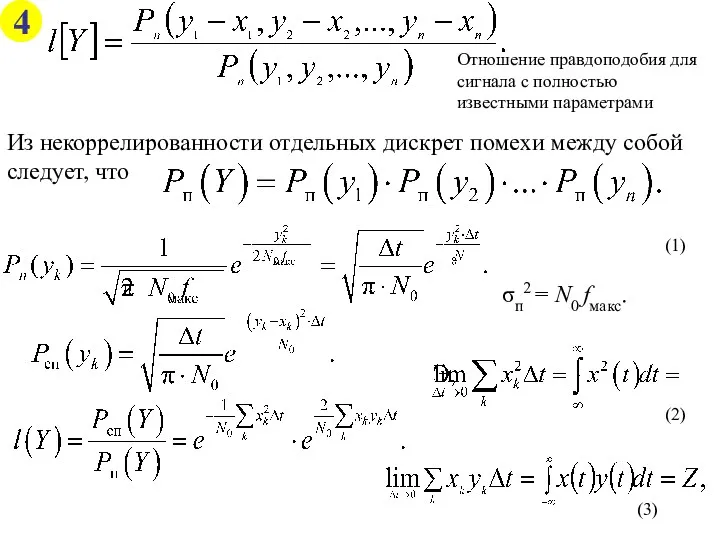
Отношение правдоподобия для сигнала с полностью известными параметрами
Из некоррелированности отдельных дискрет
Отношение правдоподобия для сигнала с полностью известными параметрами
Из некоррелированности отдельных дискрет
![Из монотонности связи l[y(t)] и Z[y(t)] следует, что сравнение l[y(t)]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/586380/slide-5.jpg)
Из монотонности связи l[y(t)] и Z[y(t)] следует, что сравнение l[y(t)] с
Из монотонности связи l[y(t)] и Z[y(t)] следует, что сравнение l[y(t)] с
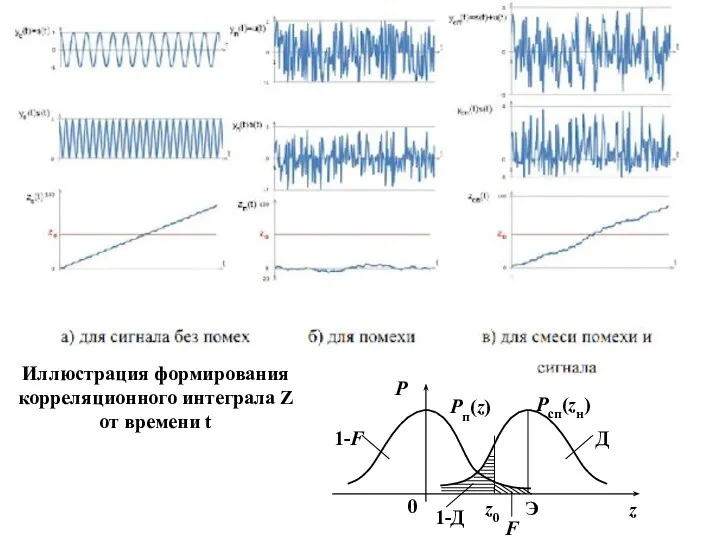
Иллюстрация формирования корреляционного интеграла Z
от времени t
Иллюстрация формирования корреляционного интеграла
Иллюстрация формирования корреляционного интеграла Z
от времени t
Иллюстрация формирования корреляционного интеграла
Анализ (4) показывает, что для сигнала с полностью известными параметрами отношение
Анализ (4) показывает, что для сигнала с полностью известными параметрами отношение
y(t)
z0
z
x(t,α)
Умножитель
Интегратор
Пороговое
устройство
Рис. 2.
Структурная схема простейшего по принципу действия обнаружителя сигнала с
y(t)
z0
z
x(t,α)
Умножитель
Интегратор
Пороговое
устройство
Рис. 2.
Структурная схема простейшего по принципу действия обнаружителя сигнала с
ВЫВОД
Обнаружитель когерентных сигналов с известными параметрами должен по наблюдаемой реализации
ВЫВОД
Обнаружитель когерентных сигналов с известными параметрами должен по наблюдаемой реализации
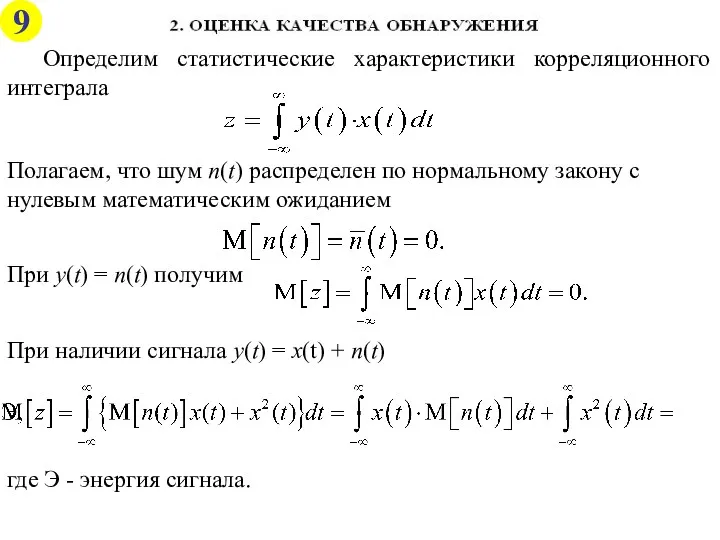
Определим статистические характеристики корреляционного интеграла
Полагаем, что шум n(t) распределен по
Определим статистические характеристики корреляционного интеграла
Полагаем, что шум n(t) распределен по
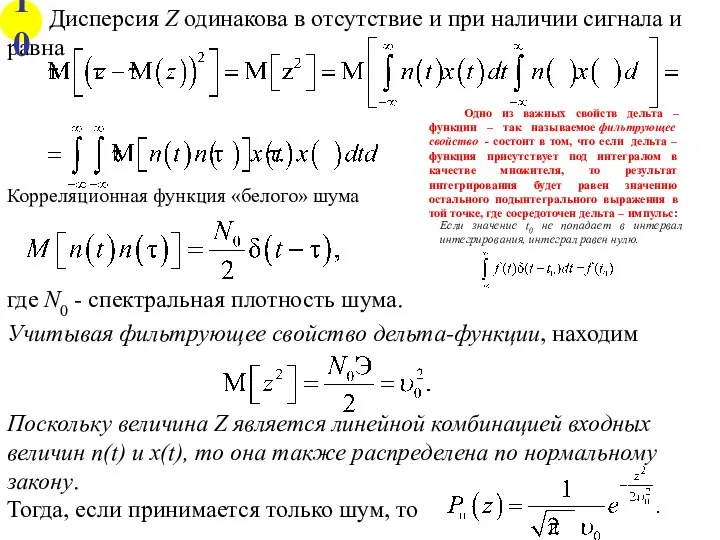
Дисперсия Z одинакова в отсутствие и при наличии сигнала и
Дисперсия Z одинакова в отсутствие и при наличии сигнала и
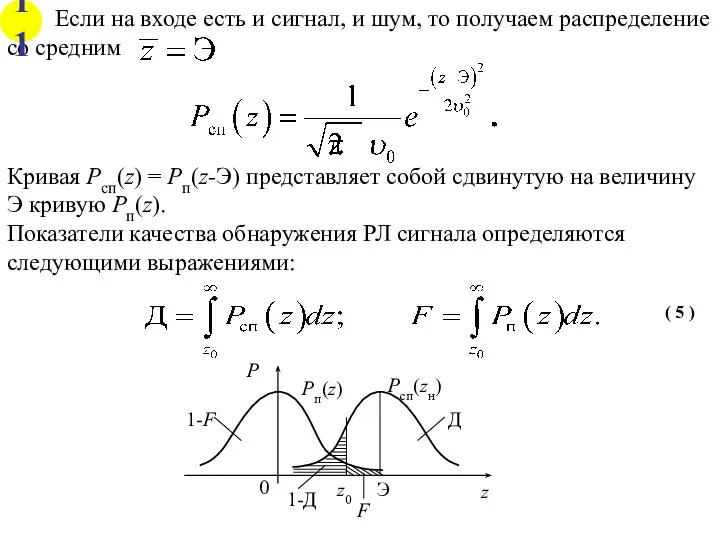
Если на входе есть и сигнал, и шум, то получаем
Если на входе есть и сигнал, и шум, то получаем
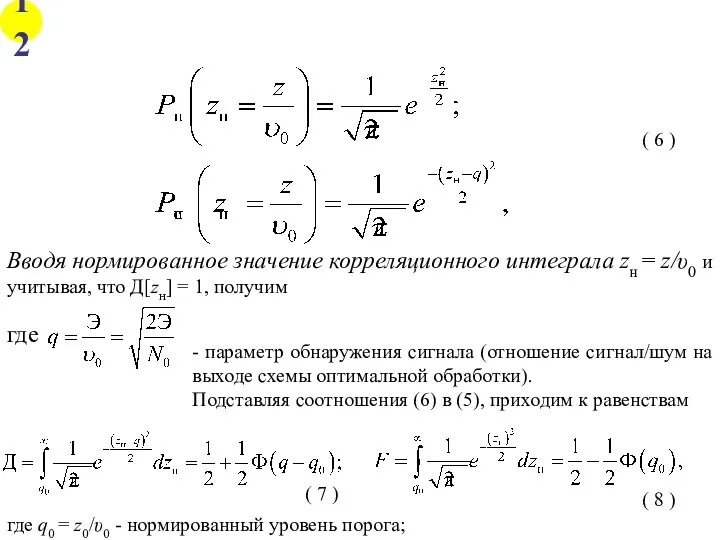
Вводя нормированное значение корреляционного интеграла zн = z/υ0 и учитывая, что
Вводя нормированное значение корреляционного интеграла zн = z/υ0 и учитывая, что
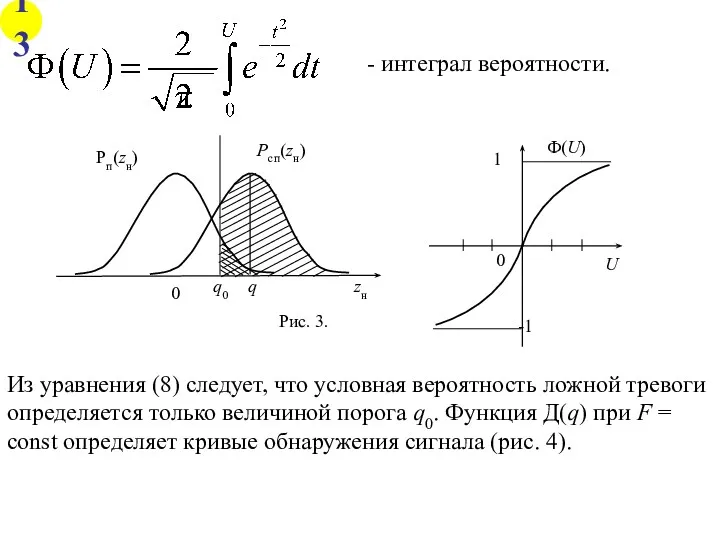
- интеграл вероятности.
Из уравнения (8) следует, что условная вероятность ложной
- интеграл вероятности.
Из уравнения (8) следует, что условная вероятность ложной
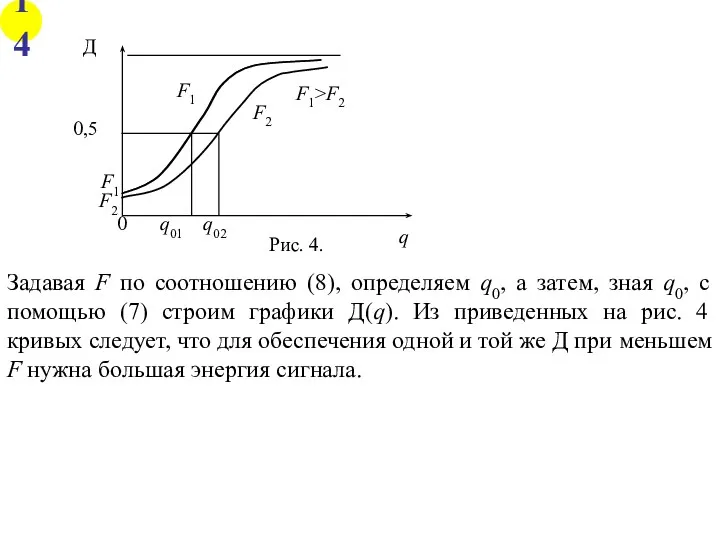
Задавая F по соотношению (8), определяем q0, а затем, зная q0,
Задавая F по соотношению (8), определяем q0, а затем, зная q0,
 Рентгеновское излучение
Рентгеновское излучение Гидравлическая система
Гидравлическая система Электрический ток и его использование
Электрический ток и его использование Физические основы микроэлектроники
Физические основы микроэлектроники Результаты ЕГЭ по физике в Самарской области 2022 год
Результаты ЕГЭ по физике в Самарской области 2022 год Презентация к уроку развивающего обучения Простые механизмы часть 2
Презентация к уроку развивающего обучения Простые механизмы часть 2 Атомдардың рентгендік спектрі. (Лекция14)
Атомдардың рентгендік спектрі. (Лекция14) Экситонные поляритоны в полупроводниковом микрорезонаторе
Экситонные поляритоны в полупроводниковом микрорезонаторе Молекулярно-кинетическая теория
Молекулярно-кинетическая теория Механика к ЕГЭ
Механика к ЕГЭ Рабочие процессы дизельного двигателя
Рабочие процессы дизельного двигателя Инжекторный ДВС. Устройство и принцип работы инжекторной системы питания
Инжекторный ДВС. Устройство и принцип работы инжекторной системы питания Презентация к уроку физики в 8 классе по теме: Тепловые двигатели
Презентация к уроку физики в 8 классе по теме: Тепловые двигатели Конспект по электротехнике (для чайников). Электрическое поле
Конспект по электротехнике (для чайников). Электрическое поле Экспериментальные и теоретические основы квантовой теории
Экспериментальные и теоретические основы квантовой теории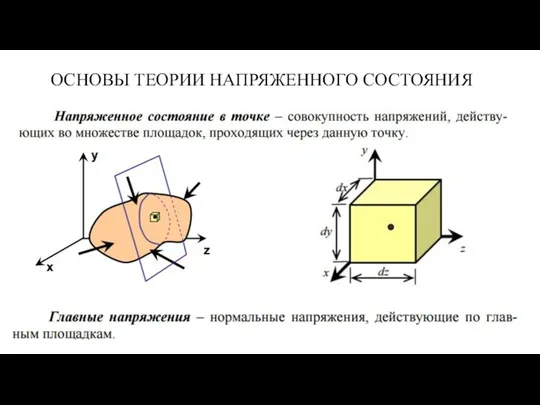 Основы теории напряженного состояния
Основы теории напряженного состояния Резьбовые соединения
Резьбовые соединения Муфты. Приводы
Муфты. Приводы Дыбыс күшейту аппараттуралары
Дыбыс күшейту аппараттуралары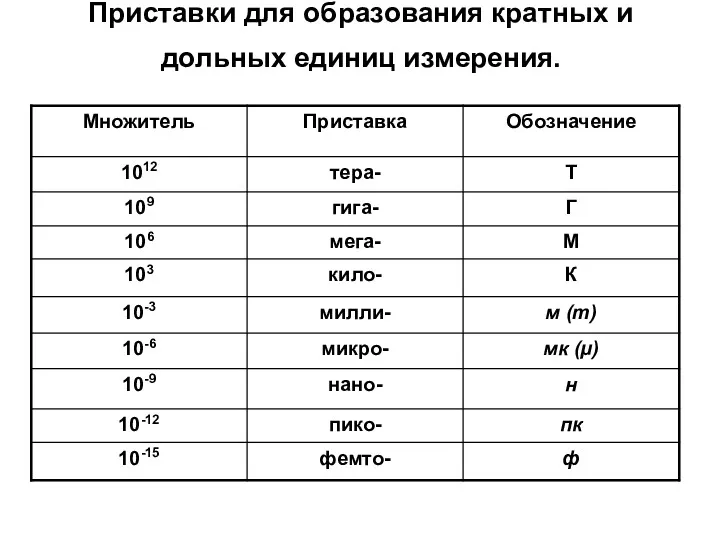 Приставки для образования кратных и дольных единиц измерения. Часть 3a
Приставки для образования кратных и дольных единиц измерения. Часть 3a Теория пар сил
Теория пар сил Planing machines for metal
Planing machines for metal Всё для фронта, всё для победы!
Всё для фронта, всё для победы! Интерференция света
Интерференция света XWER381ADM0000903
XWER381ADM0000903 Принцип работы центробежного нагнетателя. Силы, действующие на ротор нагнетателя при различных режимах работы
Принцип работы центробежного нагнетателя. Силы, действующие на ротор нагнетателя при различных режимах работы Гідростатичний тиск рідини. Розв’язування задач
Гідростатичний тиск рідини. Розв’язування задач презентация по теме Сила тока.Единицы силы тока. Амперметр
презентация по теме Сила тока.Единицы силы тока. Амперметр