- Общие сведения об устройствах получения информации о процессе

Содержание
- 2. Обычно под термином измерение понимают нахождение значения физической величины опытным путем с помощью специальных технических средств,
- 3. Обобщенная схема информационно-измерительной системы Информация, поступающая от объекта исследований в измерительный преобразователь (ИП), преобразуется в электрический
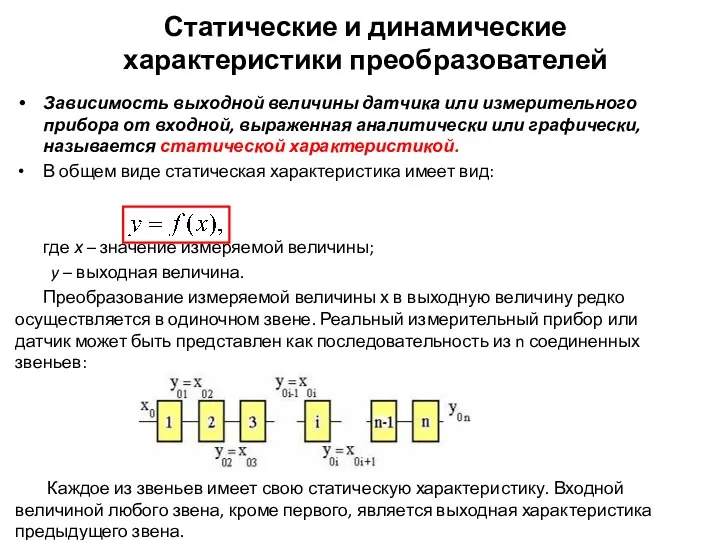
- 4. Статические и динамические характеристики преобразователей Зависимость выходной величины датчика или измерительного прибора от входной, выраженная аналитически
- 5. Если статическую характеристику любого из звеньев представить как то учитывая, что получим зависимость выходной характеристики любого
- 6. Частный случай статической характеристики звена – линейная зависимость, определяемая уравнением вида где a – постоянная, имеющая
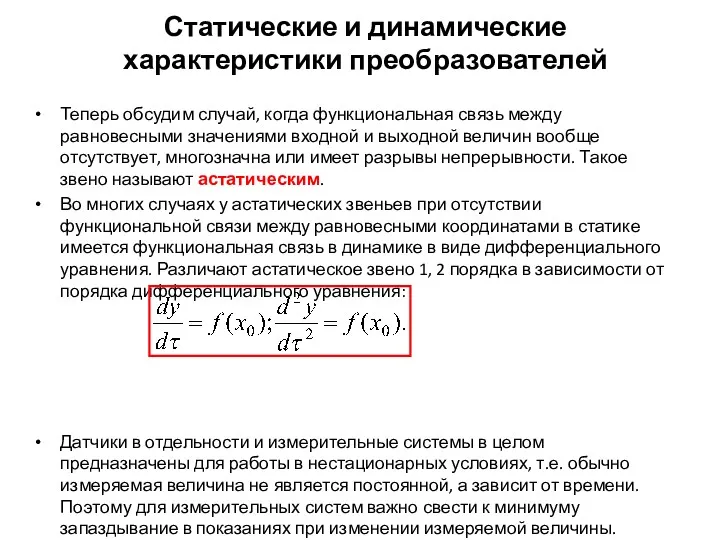
- 7. Теперь обсудим случай, когда функциональная связь между равновесными значениями входной и выходной величин вообще отсутствует, многозначна
- 8. Зависимость показаний измерительной системы от измеряемой величины в нестационарных условиях носит название динамической характеристики. Вид динамической
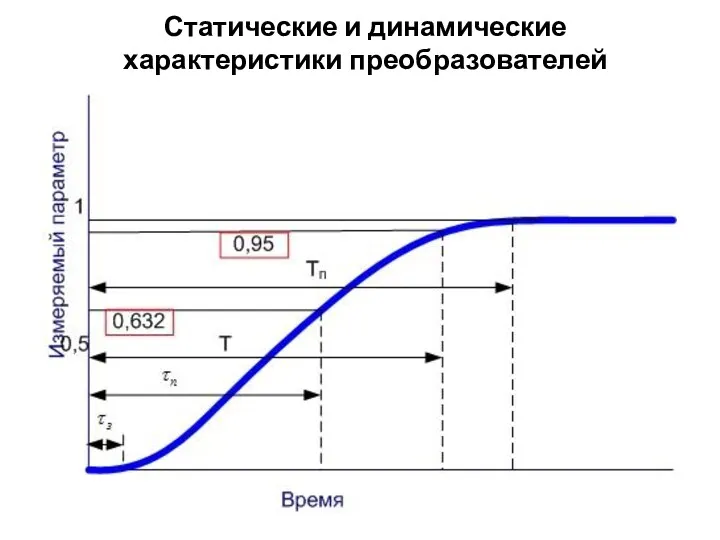
- 9. Время запаздывания (или время начала реагирования) τз– это время от момента изменения значения измеряемой величины на
- 10. Статические и динамические характеристики преобразователей
- 11. Основные понятия измерений и погрешности измерений Цель любого измерения – определение конкретного свойства объекта измерения. Поэтому
- 12. Основные понятия измерений и погрешности измерений Различают действительное и истинное значение физической величины. Истинным значением физической
- 13. Основные понятия измерений и погрешности измерений Погрешности приборов можно классифицировать по следующим признакам: Единице измерения величины;
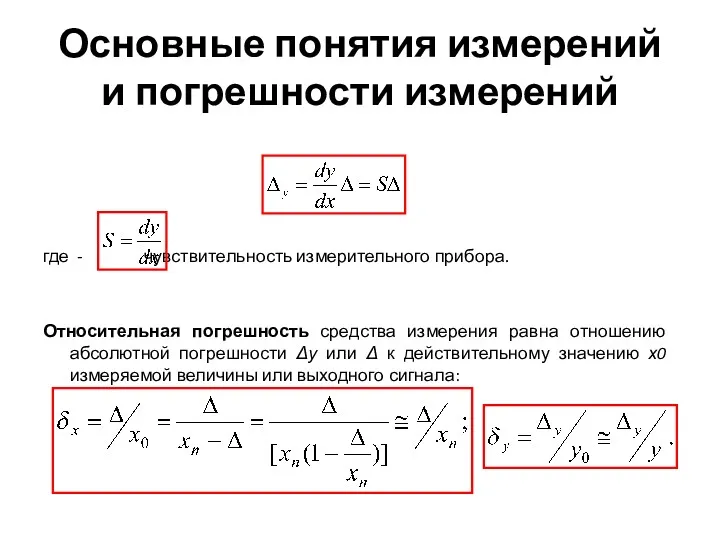
- 14. Основные понятия измерений и погрешности измерений Абсолютная погрешность измерительной системы, приведенная к ее выходу, может быть
- 15. Основные понятия измерений и погрешности измерений где - чувствительность измерительного прибора. Относительная погрешность средства измерения равна
- 16. Основные понятия измерений и погрешности измерений При выводе соотношений (2.14) и (2.15) подразумевали, что Δ/хn«1 и
- 17. Основные понятия измерений и погрешности измерений В зависимости от характера изменения погрешности при многократных испытаниях СИ
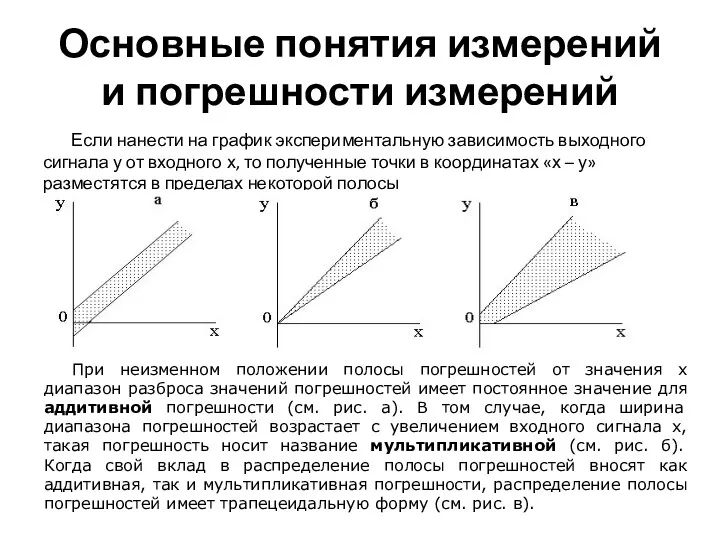
- 18. Основные понятия измерений и погрешности измерений Если нанести на график экспериментальную зависимость выходного сигнала у от
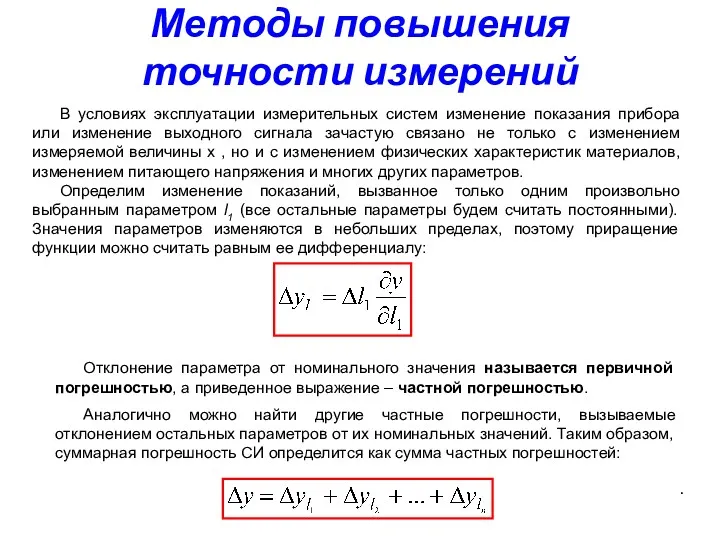
- 19. Методы повышения точности измерений В условиях эксплуатации измерительных систем изменение показания прибора или изменение выходного сигнала
- 20. Методы повышения точности измерений Первая группа методов заключается в повышении стабильности статической характеристики СИ. Результатом этого
- 21. К примеру, для простейшего измерительного преобразователя (ИП) с линейной характеристикой можем записать где х и у1
- 22. Первое слагаемое отражает мультипликативную, а второе – аддитивную составляющие погрешности. Попробуем устранить аддитивную составляющую, включив параллельно
- 23. Охватим ИП цепью отрицательной обратной связи. Статическая характеристика такого ИП имеет вид ук = k1x/(1 +
- 24. Методы повышения точности измерений Введение отрицательной обратной связи позволяет практически устранить изменения коэффициента преобразования (т. е.
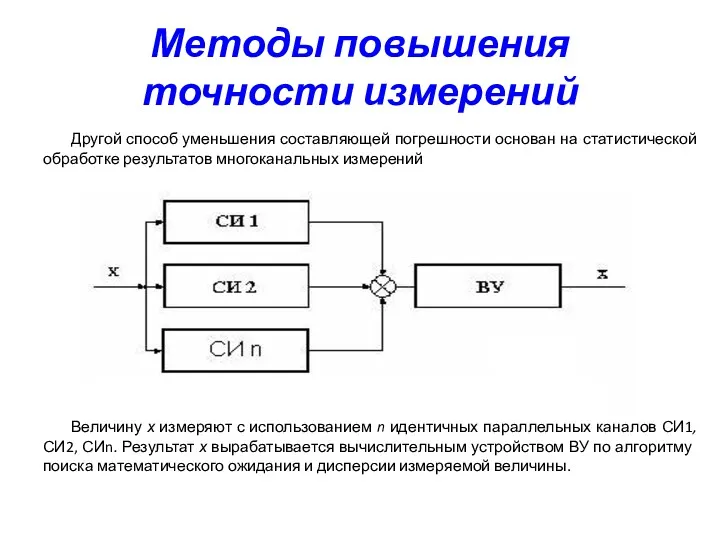
- 25. Методы повышения точности измерений Другой способ уменьшения составляющей погрешности основан на статистической обработке результатов многоканальных измерений
- 27. Скачать презентацию
Обычно под термином измерение понимают нахождение значения физической величины опытным путем
Обычно под термином измерение понимают нахождение значения физической величины опытным путем

Обобщенная схема информационно-измерительной системы
Информация, поступающая от объекта исследований в измерительный преобразователь
Обобщенная схема информационно-измерительной системы
Информация, поступающая от объекта исследований в измерительный преобразователь
Статические и динамические характеристики преобразователей
Зависимость выходной величины датчика или измерительного
Статические и динамические характеристики преобразователей
Зависимость выходной величины датчика или измерительного
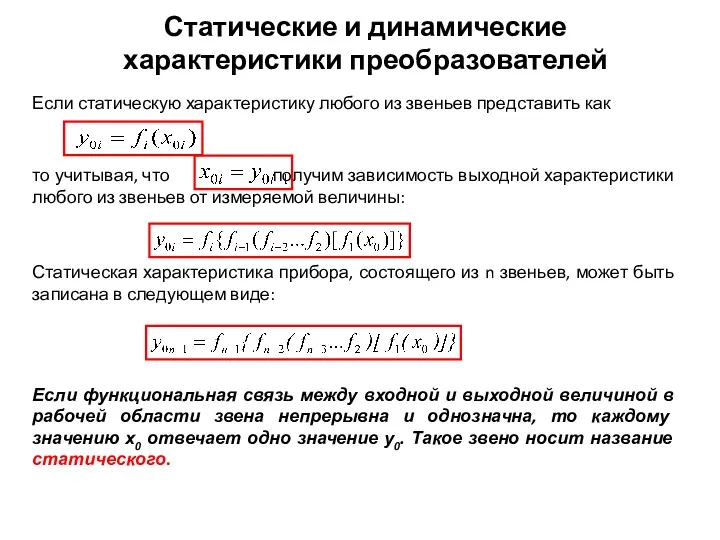
Если статическую характеристику любого из звеньев представить как
то учитывая, что получим
Если статическую характеристику любого из звеньев представить как
то учитывая, что получим
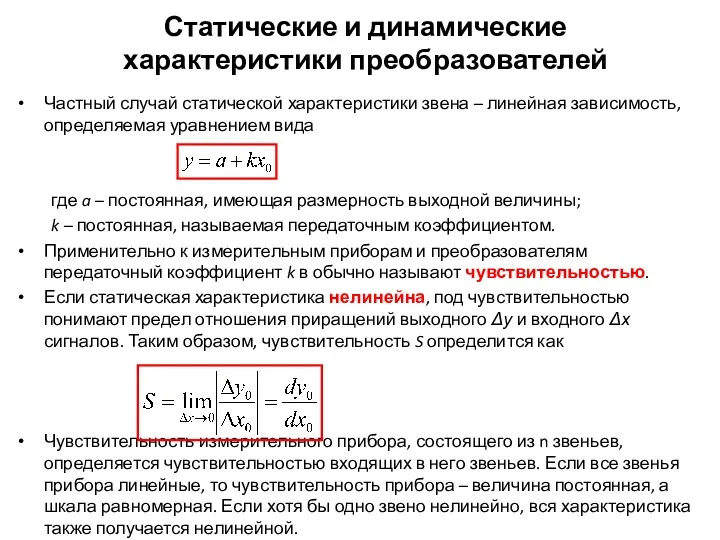
Частный случай статической характеристики звена – линейная зависимость, определяемая уравнением вида
где
Частный случай статической характеристики звена – линейная зависимость, определяемая уравнением вида
где
Теперь обсудим случай, когда функциональная связь между равновесными значениями входной и
Теперь обсудим случай, когда функциональная связь между равновесными значениями входной и
Зависимость показаний измерительной системы от измеряемой величины в нестационарных условиях носит
Зависимость показаний измерительной системы от измеряемой величины в нестационарных условиях носит
Время запаздывания (или время начала реагирования) τз– это время от момента
Время запаздывания (или время начала реагирования) τз– это время от момента
Статические и динамические характеристики преобразователей
Статические и динамические характеристики преобразователей
Основные понятия измерений и погрешности измерений
Цель любого измерения – определение
Основные понятия измерений и погрешности измерений
Цель любого измерения – определение
Основные понятия измерений и погрешности измерений
Различают действительное и истинное значение физической
Основные понятия измерений и погрешности измерений
Различают действительное и истинное значение физической
Основные понятия измерений и погрешности измерений
Погрешности приборов можно классифицировать по следующим
Основные понятия измерений и погрешности измерений
Погрешности приборов можно классифицировать по следующим
Основные понятия измерений и погрешности измерений
Абсолютная погрешность измерительной системы, приведенная к
Основные понятия измерений и погрешности измерений
Абсолютная погрешность измерительной системы, приведенная к
Основные понятия измерений и погрешности измерений
где - чувствительность измерительного прибора.
Относительная погрешность
Основные понятия измерений и погрешности измерений
где - чувствительность измерительного прибора.
Относительная погрешность
Основные понятия измерений и погрешности измерений
При выводе соотношений (2.14) и (2.15)
Основные понятия измерений и погрешности измерений
При выводе соотношений (2.14) и (2.15)
Основные понятия измерений и погрешности измерений
В зависимости от характера изменения погрешности
Основные понятия измерений и погрешности измерений
В зависимости от характера изменения погрешности
Основные понятия измерений и погрешности измерений
Если нанести на график экспериментальную зависимость
Основные понятия измерений и погрешности измерений
Если нанести на график экспериментальную зависимость
Методы повышения точности измерений
В условиях эксплуатации измерительных систем изменение показания прибора
Методы повышения точности измерений
В условиях эксплуатации измерительных систем изменение показания прибора
Методы повышения точности измерений
Первая группа методов заключается в повышении стабильности статической
Методы повышения точности измерений
Первая группа методов заключается в повышении стабильности статической
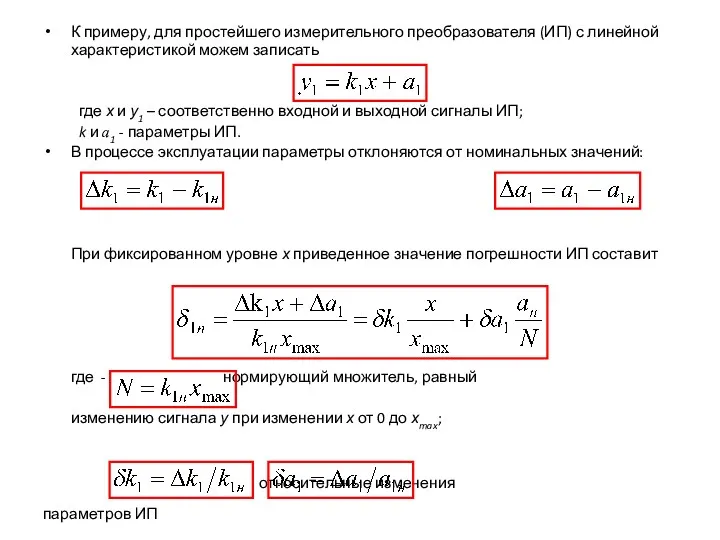
К примеру, для простейшего измерительного преобразователя (ИП) с линейной характеристикой можем
К примеру, для простейшего измерительного преобразователя (ИП) с линейной характеристикой можем
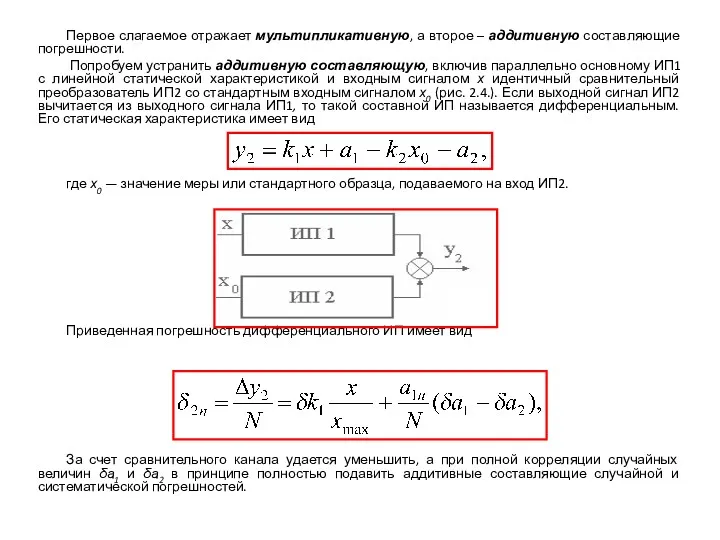
Первое слагаемое отражает мультипликативную, а второе – аддитивную составляющие погрешности.
Попробуем
Первое слагаемое отражает мультипликативную, а второе – аддитивную составляющие погрешности.
Попробуем
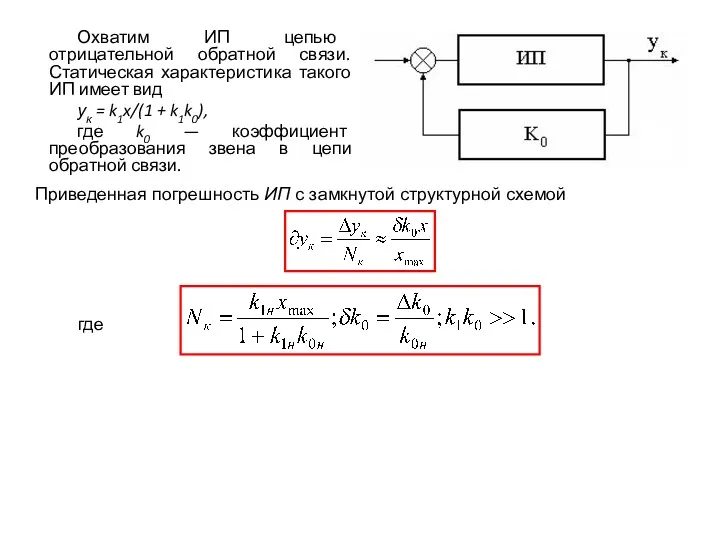
Охватим ИП цепью отрицательной обратной связи. Статическая характеристика такого ИП имеет
Охватим ИП цепью отрицательной обратной связи. Статическая характеристика такого ИП имеет
Методы повышения точности измерений
Введение отрицательной обратной связи позволяет практически устранить изменения
Методы повышения точности измерений
Введение отрицательной обратной связи позволяет практически устранить изменения
Методы повышения точности измерений
Другой способ уменьшения составляющей погрешности основан на статистической
Методы повышения точности измерений
Другой способ уменьшения составляющей погрешности основан на статистической
 Заклепочные соединения
Заклепочные соединения Физическое Поле Чудес
Физическое Поле Чудес Нахождение механической силы через силу и перемещение
Нахождение механической силы через силу и перемещение Кейс-технологии на уроках физики
Кейс-технологии на уроках физики Движение заряженных частиц в электрическом и магнитном полях
Движение заряженных частиц в электрическом и магнитном полях Презентация Явление электромагнитной индукции (9 класс)
Презентация Явление электромагнитной индукции (9 класс) Особенности создания гиперзвуковых летательных аппаратов (ГЛА)
Особенности создания гиперзвуковых летательных аппаратов (ГЛА) Формы организации учебно-исследовательской и проектной деятельности
Формы организации учебно-исследовательской и проектной деятельности Молния. Электрическая природа молнии
Молния. Электрическая природа молнии Статические испытания
Статические испытания Масса и сила. Законы Ньютона
Масса и сила. Законы Ньютона Металловедение. Атомное строение металлов и сплавов. Типы кристаллических решеток. (Лекция 1)
Металловедение. Атомное строение металлов и сплавов. Типы кристаллических решеток. (Лекция 1) Динамика. Законы динамики
Динамика. Законы динамики Динамика. Основные понятия
Динамика. Основные понятия Применение интерференции в технике
Применение интерференции в технике Элементы машиноведения. Составные части машин
Элементы машиноведения. Составные части машин Опыты по рассеянию альфа-частиц. Резерфордовская модель атома. АФ1.9
Опыты по рассеянию альфа-частиц. Резерфордовская модель атома. АФ1.9 Урок по теме Ускорение свободного падения на Земле и других планетах 10 класс
Урок по теме Ускорение свободного падения на Земле и других планетах 10 класс Электрическое поле в вакууме
Электрическое поле в вакууме Состояние вещества. Твердые вещества. Фазовый переход. Часть VI
Состояние вещества. Твердые вещества. Фазовый переход. Часть VI Рентгеновские лучи, их природа и свойства, применение в науке и технике
Рентгеновские лучи, их природа и свойства, применение в науке и технике Виды зубчатых передач
Виды зубчатых передач Синхронные машины
Синхронные машины Біріктірулер. Бұрандалы біріктірулер
Біріктірулер. Бұрандалы біріктірулер Звук. Звуковая шкала
Звук. Звуковая шкала Электростатическое поле в вакууме
Электростатическое поле в вакууме Определения, элементы и параметры электрических цепей
Определения, элементы и параметры электрических цепей Технология ремонта машин. Решение задач
Технология ремонта машин. Решение задач