- Динамика. Законы динамики

Содержание
- 2. Динамика - раздел теоретической механики, в котором изучаются движение тел под действием приложенных сил
- 3. Законы динамики.
- 4. 1) І-ый закон Ньютона Если на тело не действуют силы, то оно находится либо в состоянии
- 5. 2) ІІ-ой закон Ньютона Ускорение движения тела пропорционально действующей на него силе
- 6. 3) ІІІ-ий закон Ньютона Каждому действию соответствует равное и противоположно направленное противодействие
- 7. 4) Принцип суперпозиции. Если на тело действует несколько сил, то ускорение движения тела будет пропорционально одной
- 8. Главный вектор системы сил
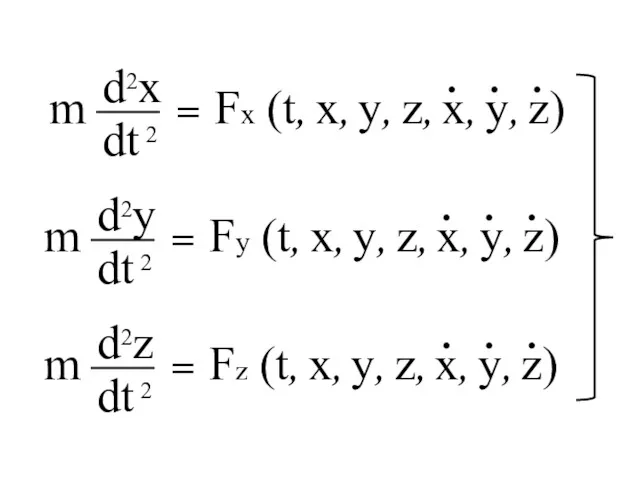
- 9. Дифференциальные уравнения движения точки.
- 10. Дифференциальные уравнения движения точки в декартовой системе координат.
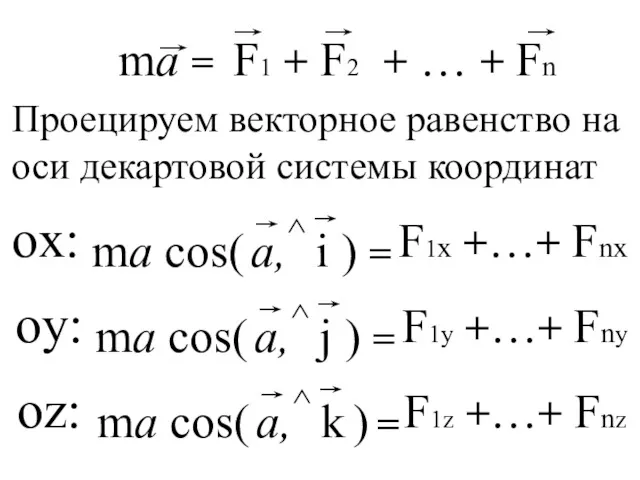
- 12. ox: oy: oz: F1x +…+ Fnx F1y +…+ Fny F1z +…+ Fnz Проецируем векторное равенство на
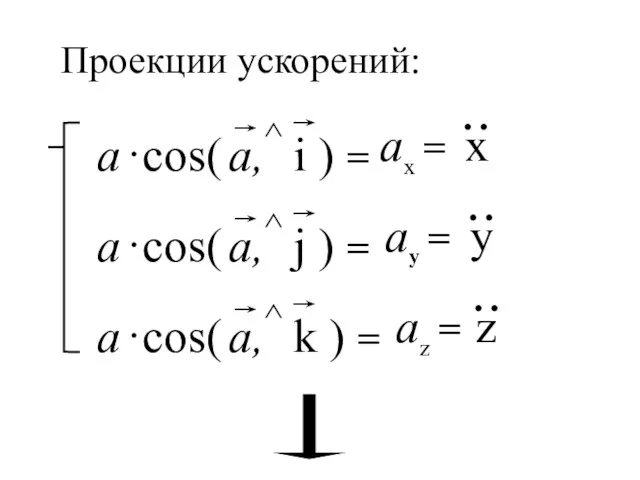
- 13. ax = ay = az = Проекции ускорений:
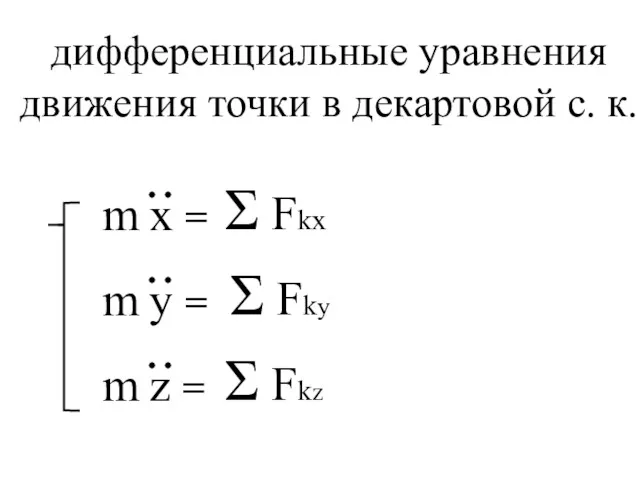
- 14. Σ Fkx Σ Fky Σ Fkz дифференциальные уравнения движения точки в декартовой с. к.
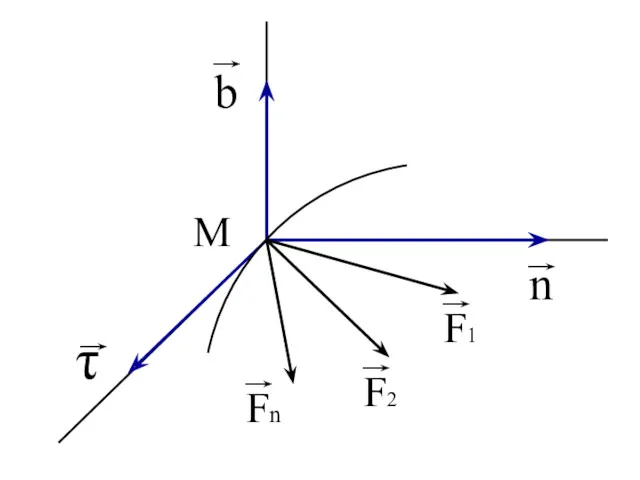
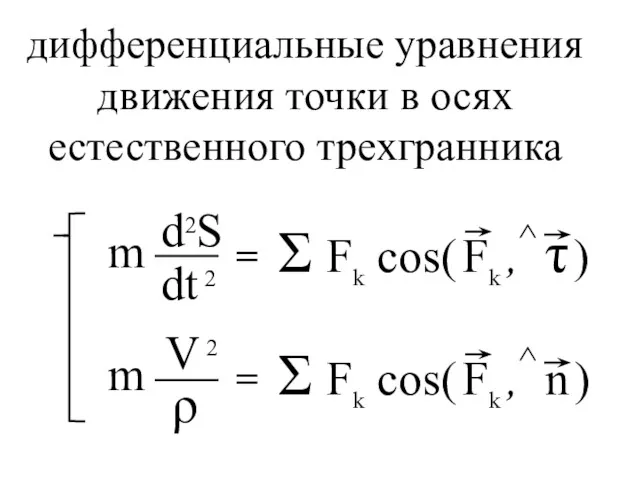
- 15. Дифференциальные уравнения движения точки в осях естественного трехгранника.
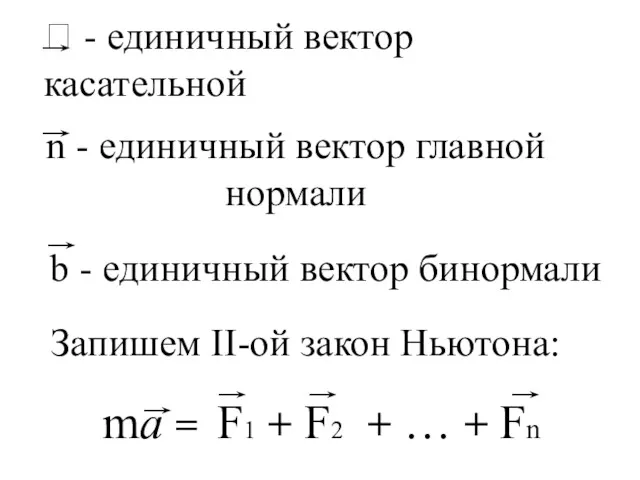
- 17. Запишем ІІ-ой закон Ньютона:
- 18. Проецируем это равенство на оси естественного трехгранника:
- 19. 0 - тангенсальная составляющая - нормальная составляющая - т.к. вектор ускорения лежит в соприкасающейся плоскости Проекции
- 20. дифференциальные уравнения движения точки в осях естественного трехгранника
- 21. Задачи динамики
- 22. Прямая задача По известной массе, известному закону движения требуется определить результирующую силу, действующую на тело.
- 23. Дано: m x = x(t) y = y(t) z = z(t) Найти: F - ?
- 24. Решение: Fx Fy Fz F = - модуль силы
- 25. Направление задается направляющими косинусами:
- 26. Обратная задача По известной массе, известным силам, известным начальным условиям требуется определить закон движения.
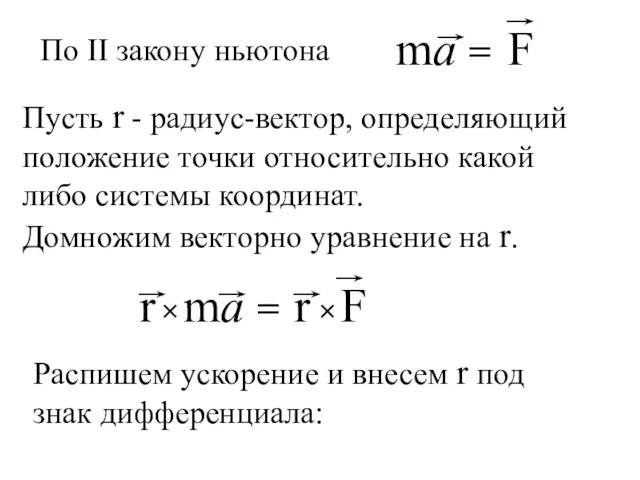
- 28. Для того, чтобы получить закон движения, необходимо дважды проинтегрировать каждое уравнение, используя начальные условия (но не
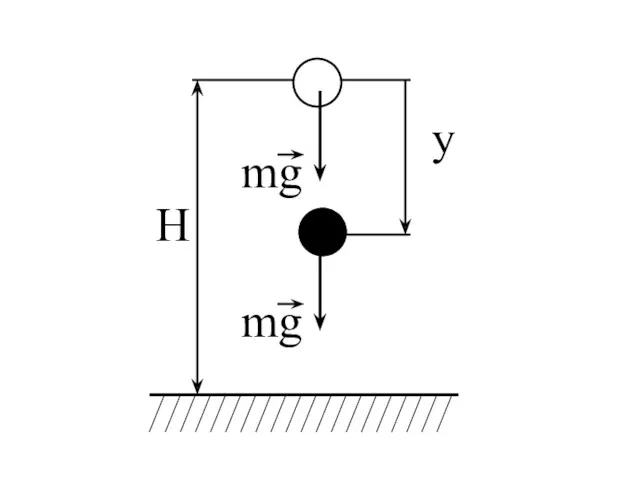
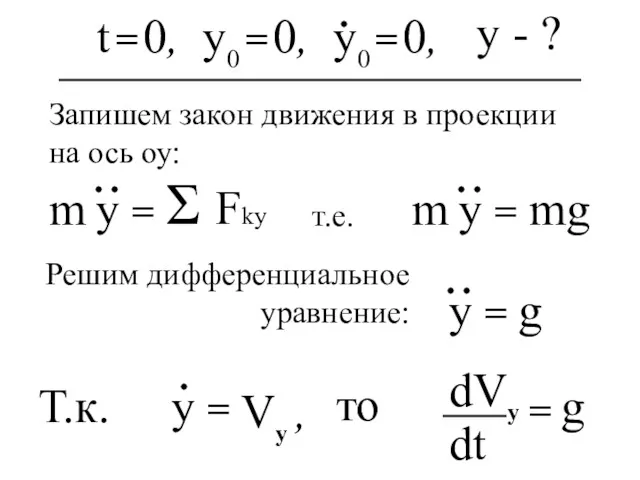
- 30. Σ Fky mg g Vy , g y - ? Запишем закон движения в проекции на
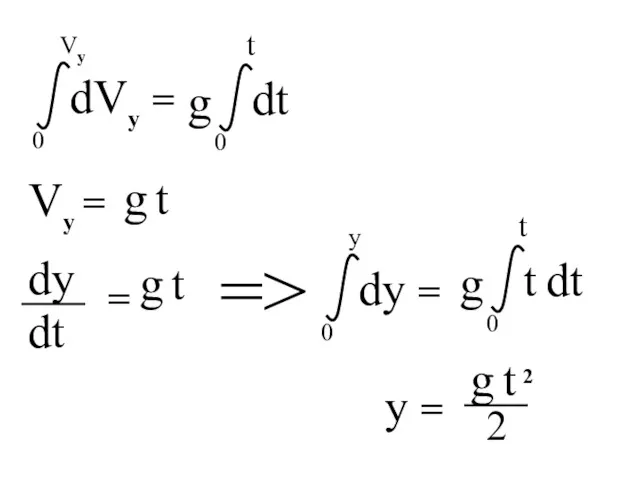
- 31. Vy = g t g t y = =>
- 32. Динамика системы
- 33. Внешние силы Внутренние силы - силы, действующие на тела данной системы со стороны тел, не входящих
- 34. Главный вектор внутренних сил системы равен нулю. Главный момент внутренних сил системы равен нулю.
- 35. Масса. Центр масс.
- 36. Масса системы М = Центр масс системы - сумма масс тел, входящих в систему. - геометрическая
- 37. Для того, чтобы получить координаты центра масс, надо спроецировать векторное равенство на оси.
- 38. xc = zc = yc =
- 39. Дифференциальные уравнение движения системы
- 42. Теорема об изменении количества движения
- 43. Запишем ІІ-ой закон Ньютона для точки: Получим теорему об изменении количества движения точки в дифференциальной форме:
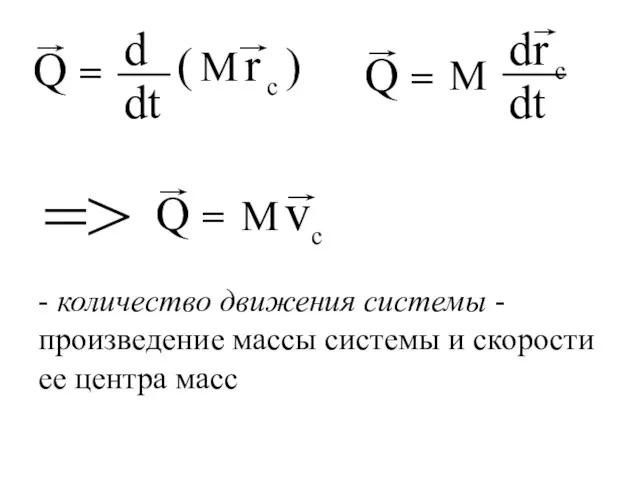
- 44. - количество движения системы - сумма количеств движений точек, входящих в систему Распишем выражение и поменяем
- 45. => - количество движения системы - произведение массы системы и скорости ее центра масс
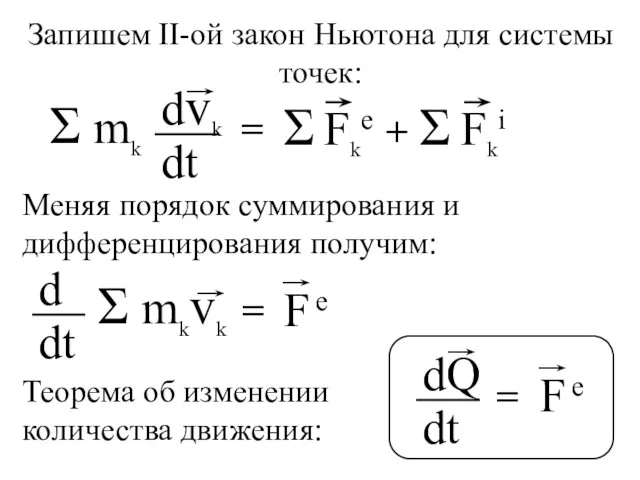
- 46. Запишем ІІ-ой закон Ньютона для системы точек: Меняя порядок суммирования и дифференцирования получим: Теорема об изменении
- 47. Первая производная по времени от вектора количества движения системы равна главному вектору внешних сил
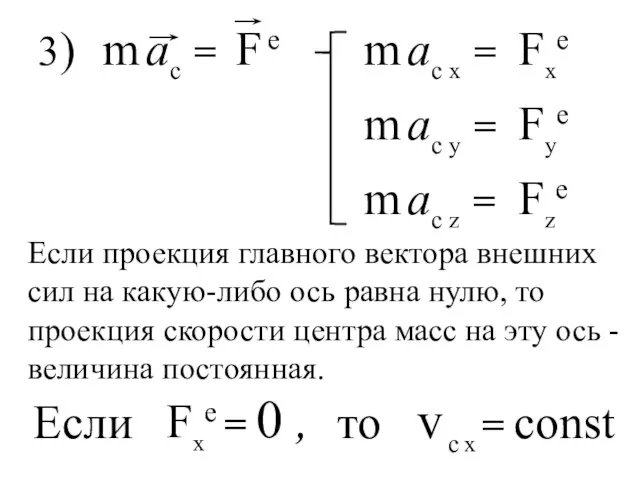
- 48. Следствия : 1) 2) Если главный вектор внешних сил системы равен нулю, то тело покоится или
- 49. Fxe Fye Fze
- 50. Теорема о движении центра масс системы
- 51. Эта формула гласит: Центр масс системы движется как материальная точка, к которой приложены все силы, действующие
- 52. Следствия : 1) 2) Внутренними силами нельзя изменить движение центра масс системы. Если главный вектор внешних
- 53. 3) m ac x = Fxe Fye Fze m ac y = m ac z =
- 54. Теорема об изменении момента количества движения
- 55. По ІІ закону ньютона Пусть r - радиус-вектор, определяющий положение точки относительно какой либо системы координат.
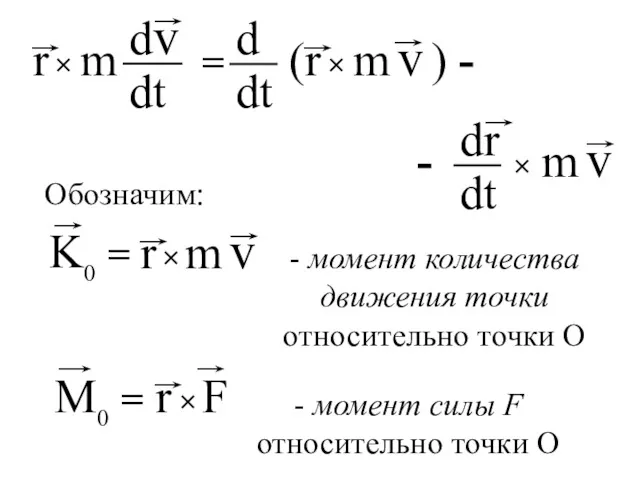
- 56. Обозначим: - момент количества движения точки относительно точки О - момент силы F относительно точки О
- 57. Момент количества движения системы определяется как векторная сумма моментов количества движения точек, входящих в систему.
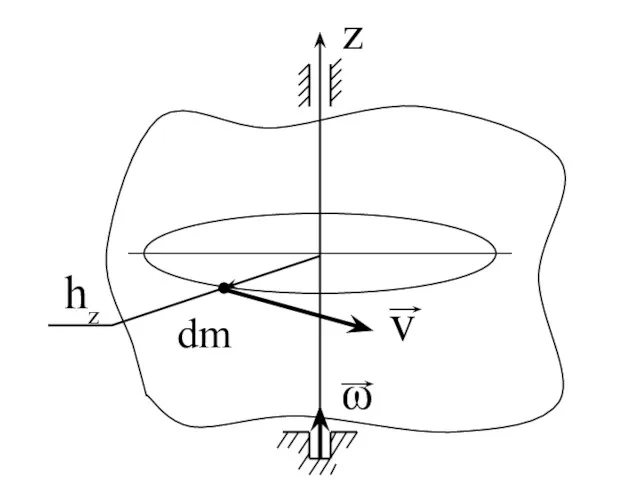
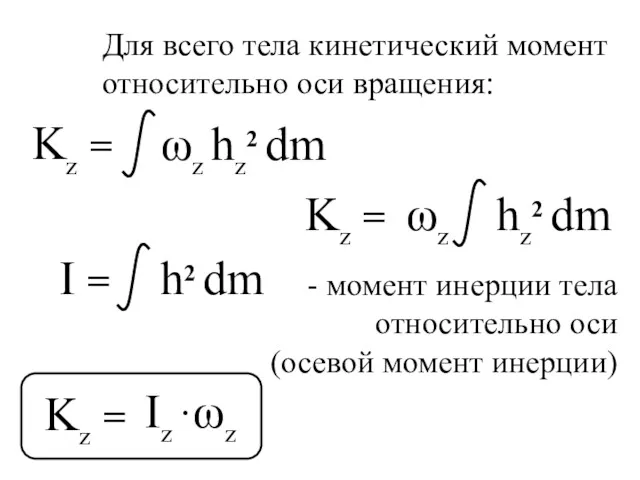
- 58. Момент количества движения твердого тела, вращающегося вокруг неподвижной оси (кинетический момент)
- 60. v = ωz·hz v dm = ωz hz dm v dm hz = ωz hz2 dm
- 61. Kz = I = Kz = Iz ·ωz - момент инерции тела относительно оси (осевой момент
- 62. Моменты инерции
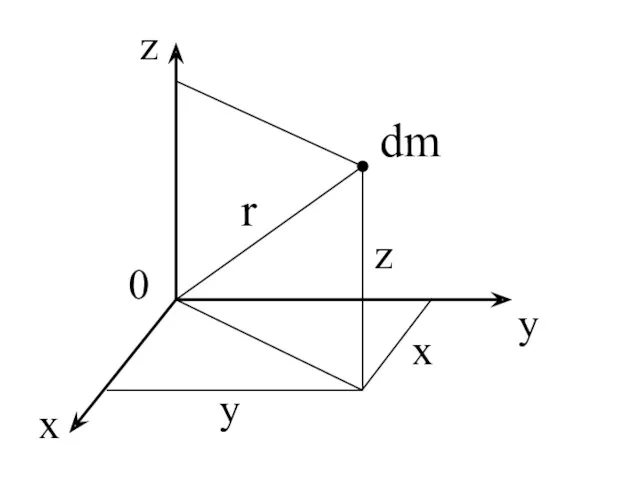
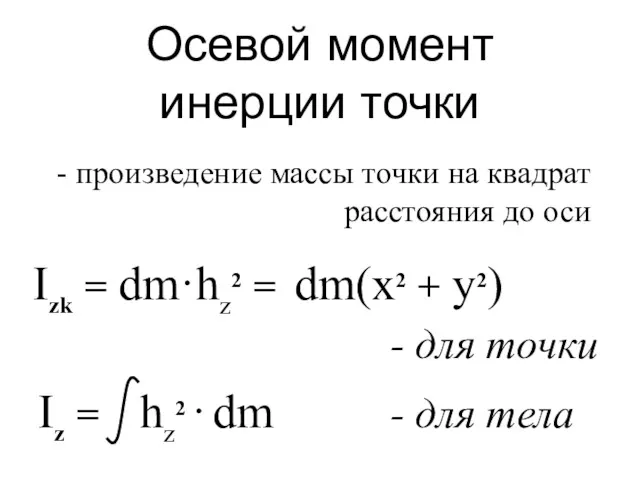
- 64. Осевой момент инерции точки Izk = dm·hz2 = dm(x2 + y2) Iz = - для точки
- 65. Полярный момент инерции точки I0k = dm·r 2 = dm(x2 + y2 + z2) I0 =
- 66. Центробежные моменты инерции - произведение массы точки на координаты, стоящие в индексе
- 67. Ixy = Ixz = Iyz = - для тела Ixy = dm·x ·y Ixz = dm·x
- 68. Задача: М - масса l - длина Найти все моменты инерции
- 69. dm = Iz = Ic = Масса кусочка dx : - момент инерции относительно оси z
- 70. Iz = Iz = M R 2
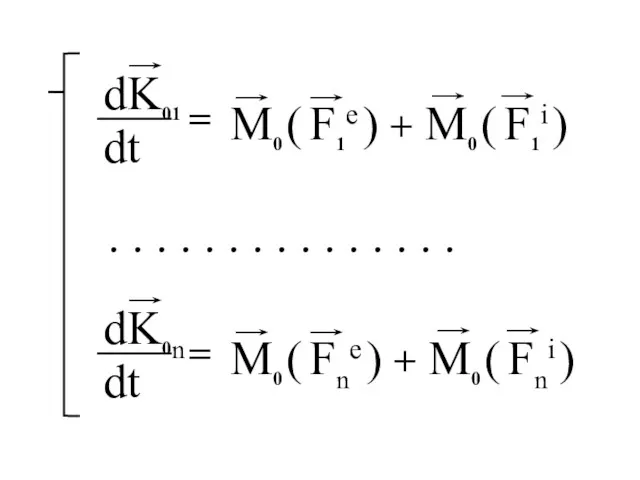
- 71. Теорема об изменении момента количества движения точки = M0e
- 72. Производная по времени от вектора момента количества движения точки равна моменту внешних сил относительно той же
- 73. . . . . . . . . . . . . . . .
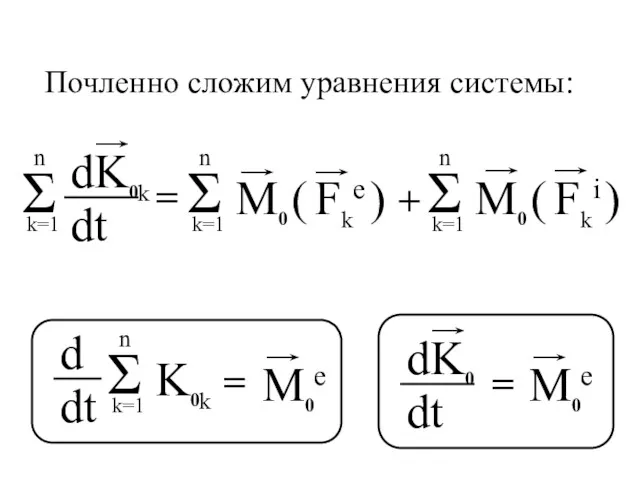
- 74. Почленно сложим уравнения системы:
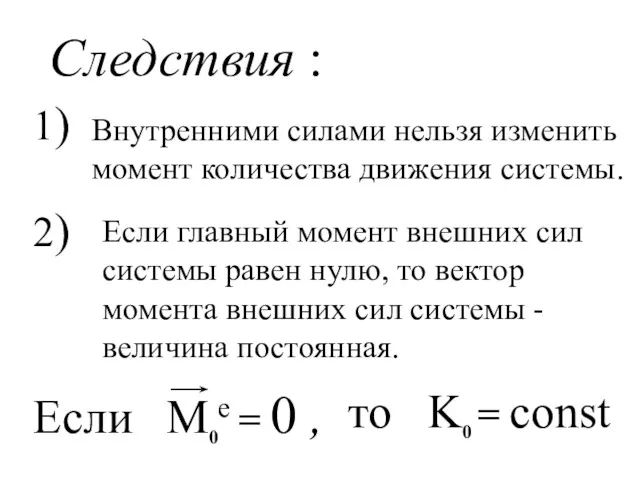
- 75. Следствия : 1) 2) Внутренними силами нельзя изменить момент количества движения системы. Если главный момент внешних
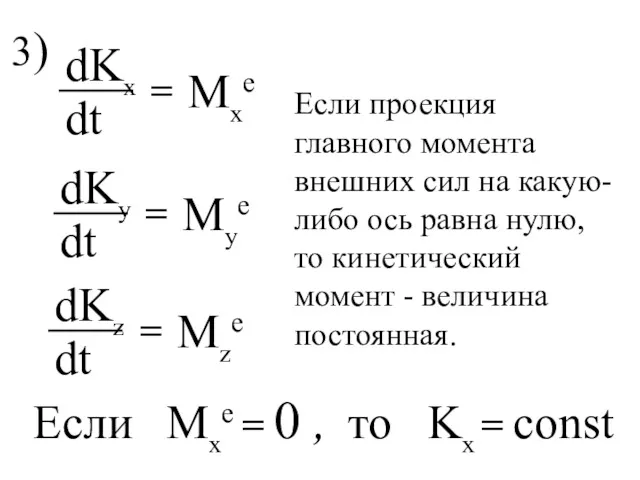
- 76. 3) Mxe Mze Mye Если проекция главного момента внешних сил на какую-либо ось равна нулю, то
- 77. Дифференциальное уравнение движения твердого тела относительно неподвижной оси
- 78. Mze Mze Mze Kz = Iz ·ωz
- 79. Работа силы
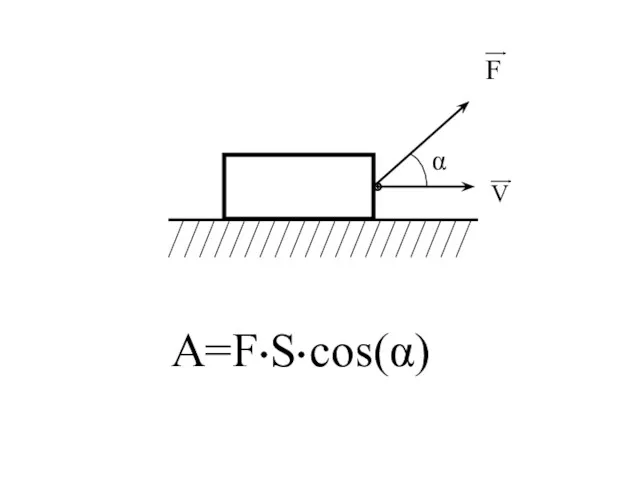
- 80. Прямолинейное перемещение тела.
- 82. Перемещение тела по кривой.
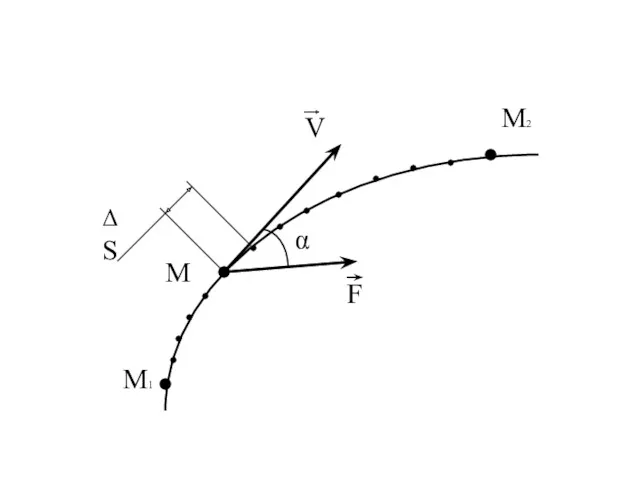
- 83. Если точка перемещается по кривой и сила изменяется, то для того чтобы найти работу силы, произведенную
- 84. Δ S
- 85. Тогда работа , произведенная силой на k-ом участке определится как: Ak = Вся работа на участке
- 86. A1,2 = Элементарная работа: Работа определяется точно криволинейным интегралом:
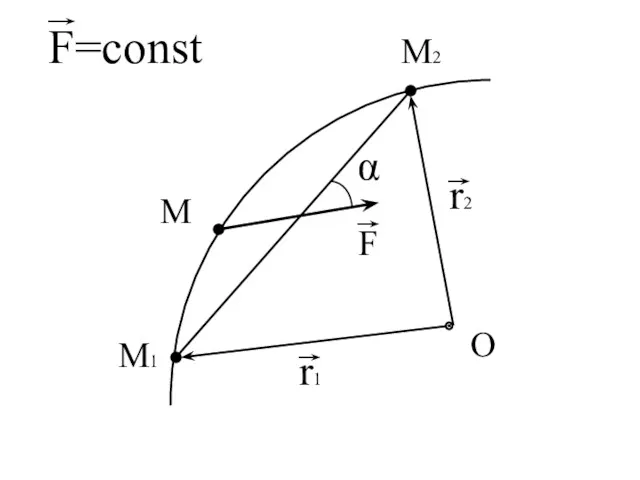
- 89. Работа силы, постоянной по величине и направлению.
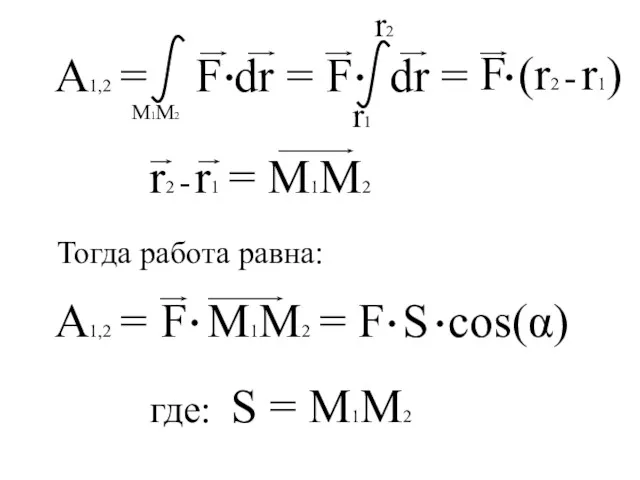
- 91. A1,2 = A1,2 = где: S = M1M2 Тогда работа равна:
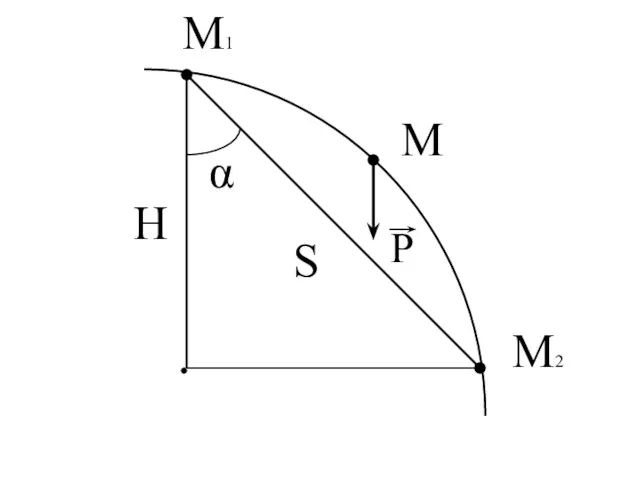
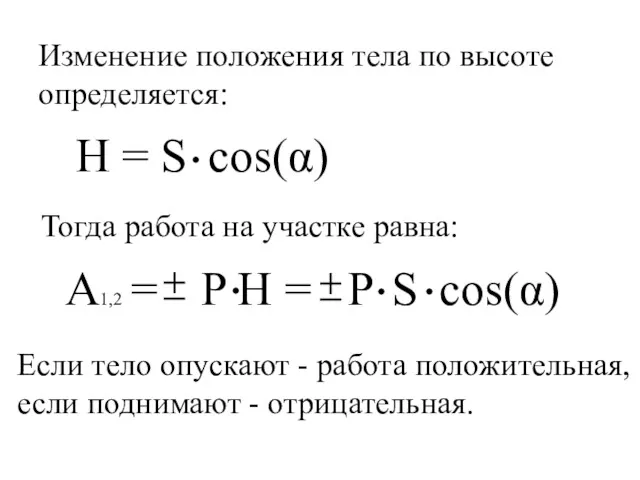
- 92. Работа силы тяжести.
- 94. A1,2 = Изменение положения тела по высоте определяется: Тогда работа на участке равна: Если тело опускают
- 95. Работа силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси.
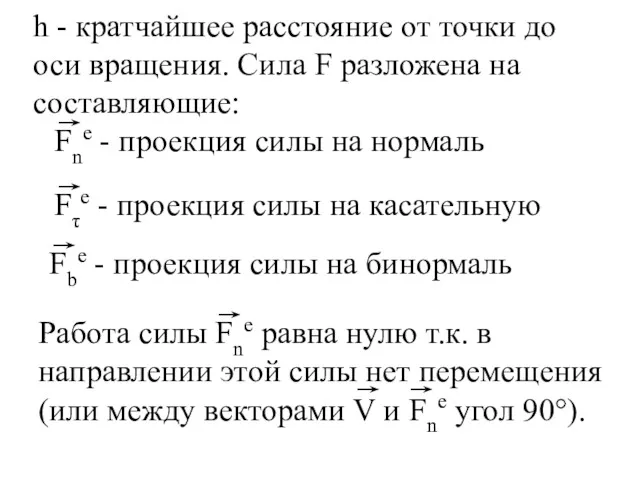
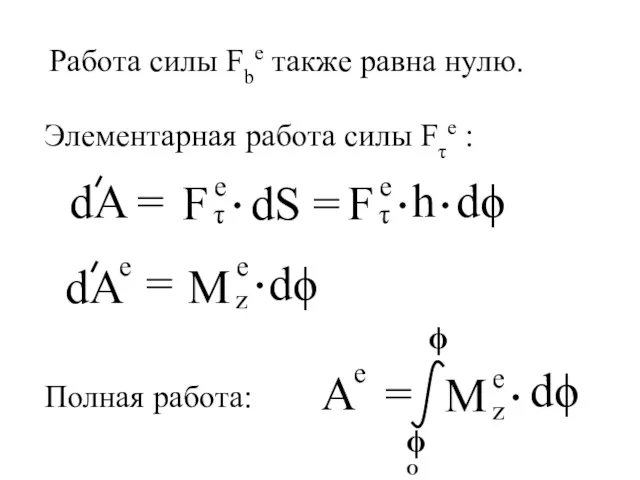
- 97. h - кратчайшее расстояние от точки до оси вращения. Сила F разложена на составляющие:
- 98. Полная работа: Элементарная работа силы Fτe : Работа силы Fbe также равна нулю.
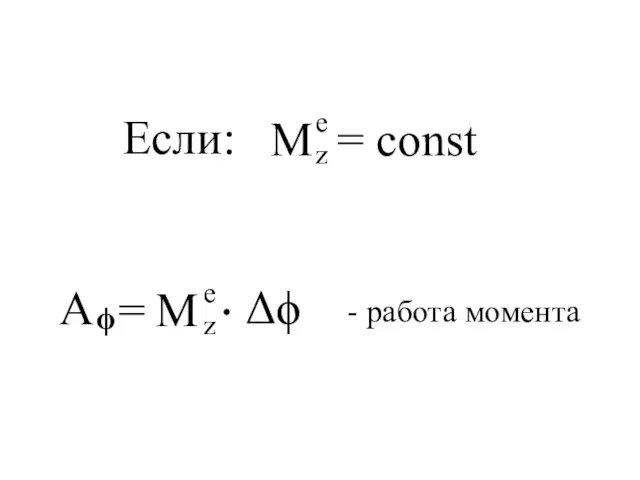
- 99. Если: - работа момента
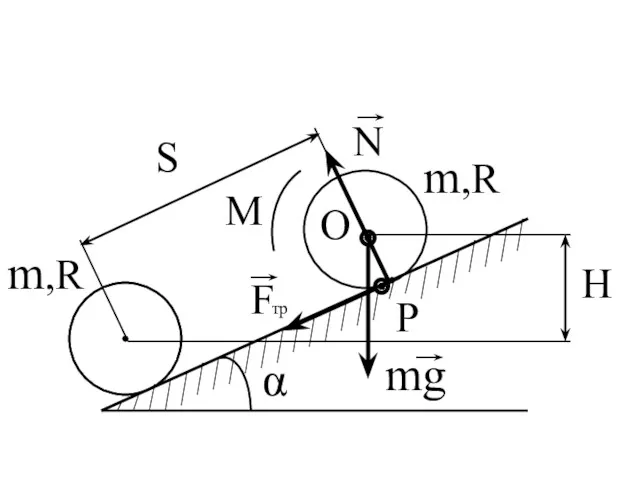
- 100. Пример Центр тяжести однородного колеса поднимается на высоту h, под действием момента М Найти работу внешних
- 101. H S
- 102. M = const ; т. P - МЦС Работы силы трения и силы реакции опоры равны
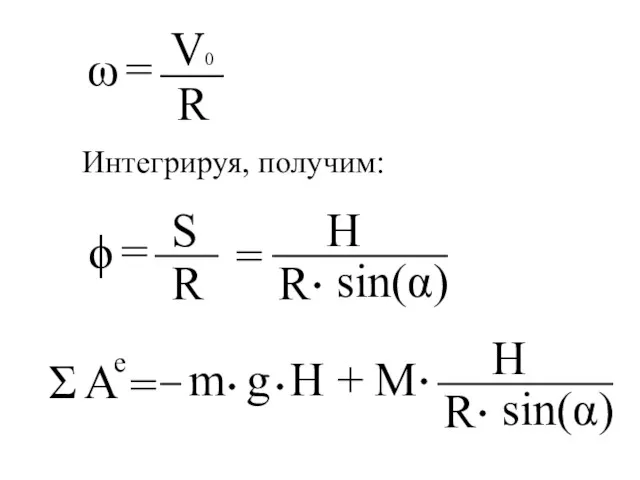
- 103. ω = ϕ = Интегрируя, получим:
- 104. Кинетическая энергия
- 105. Кинетическая энергия точки
- 106. Для точки второй закон Ньютона выглядит так:
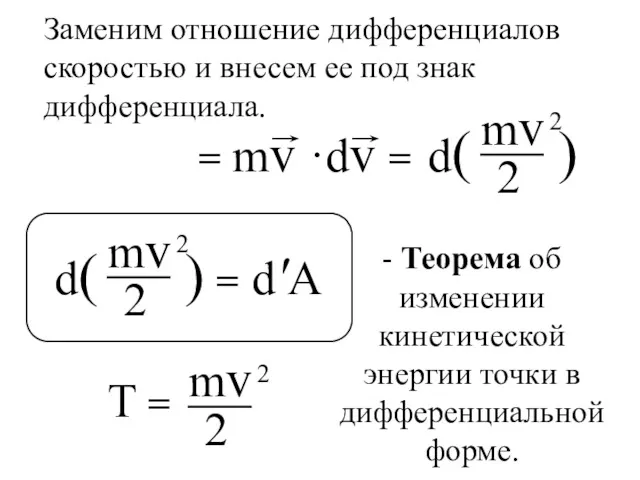
- 107. d'A T = - Теорема об изменении кинетической энергии точки в дифференциальной форме. Заменим отношение дифференциалов
- 108. T = Кинетическая энергия системы определяется как сумма кинетических энергий точек, входящих в систему.
- 109. Кинетическая энергия системы. (Теорема Кёнига)
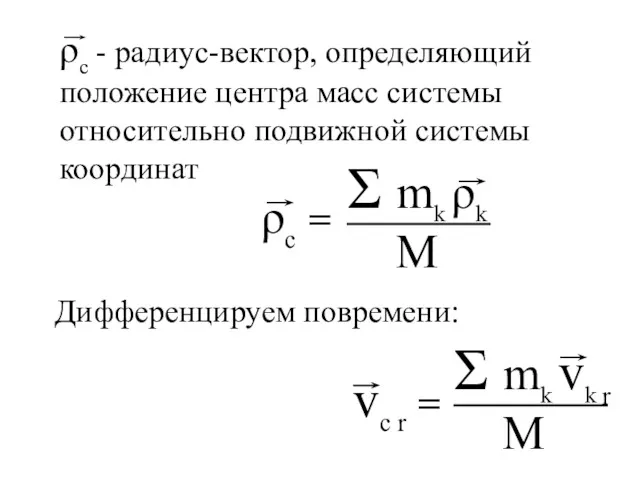
- 111. 01x1y1z1 - неподвижная система координат Система координат 02x2y2z2 перемещается поступательно.
- 112. Tr = Дифференцируем уравнение по времени. - кинетическая энергия системы относительно подвижной системы координат
- 113. Tr T =
- 114. Дифференцируем повремени:
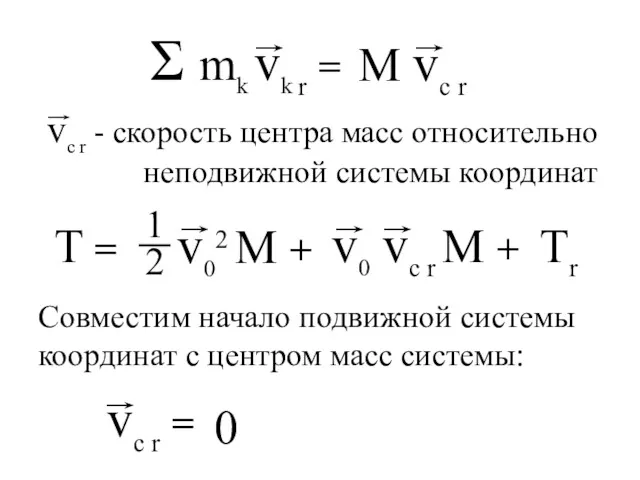
- 115. T = Tr 0 Совместим начало подвижной системы координат с центром масс системы:
- 116. T = Tr Кинетическая энергия системы равна сумме кинетической энергии поступательного движения центра масс системы и
- 117. Кинетическая энергия твёрдого тела
- 118. При поступательном движении: T = T = T = Кинетическая энергия системы определяется - полупроизведение массы
- 119. При вращательном движении: Tk = vk = ω hk
- 120. Tk = T = Σ mk hk2 = Iz T = Кинетическая энергия системы: - момент
- 121. При плоскопараллельном движении: T = Tr T = кинетическая энергия определяется по формуле Кёнига -
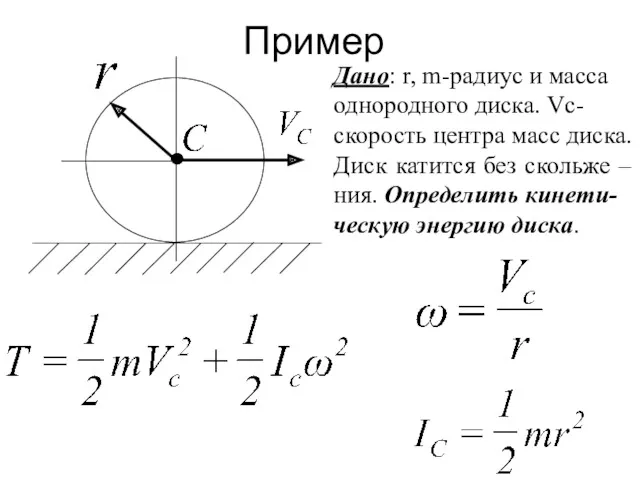
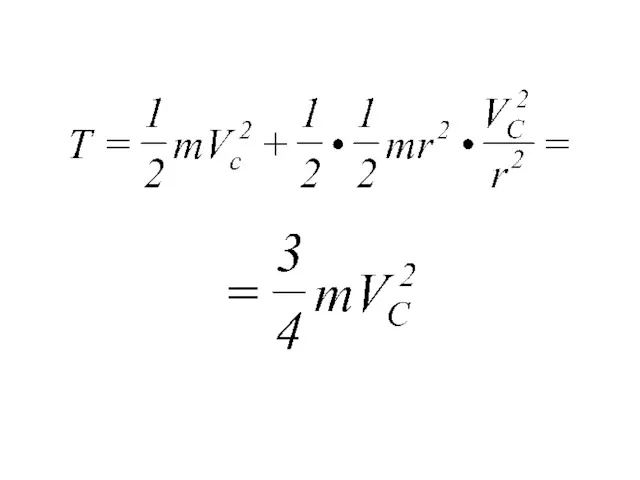
- 122. Пример Дано: r, m-радиус и масса однородного диска. Vc- скорость центра масс диска. Диск катится без
- 124. Теорема об изменении кинетической энергии системы
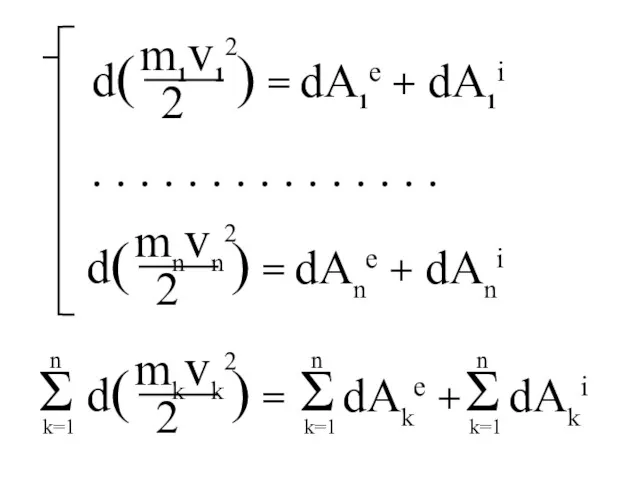
- 125. Пусть система состоит из n-материальных точек. Делим все силы, действующие на систему, на внешние и внутренние
- 126. dA1e + dA1i dAne + dAni . . . . . . . . . .
- 127. dAe + dAi dT = dAe + dAi - теорема об изменении кинетической энергии системы в
- 128. T - T0 = Ae + Ai Если под действием внешних и внутренних сил системы она
- 129. Изменение кинетической энергии системы при перемещении ее из начального положения в конечное равна сумме работ внешних
- 130. Принцип Даламбера или Принцип кинетостатики
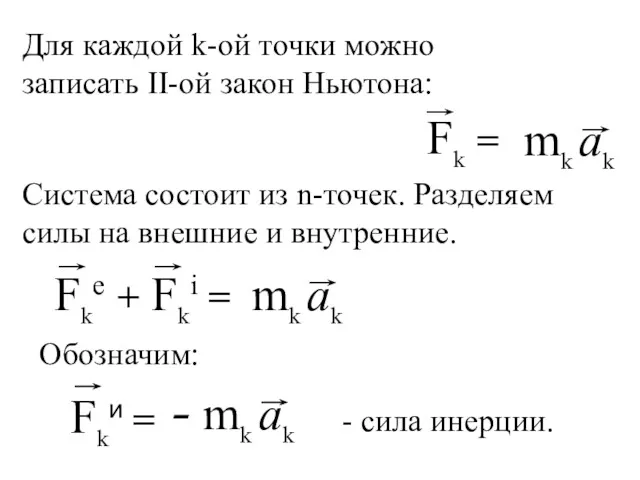
- 131. Для каждой k-ой точки можно записать ІІ-ой закон Ньютона: Система состоит из n-точек. Разделяем силы на
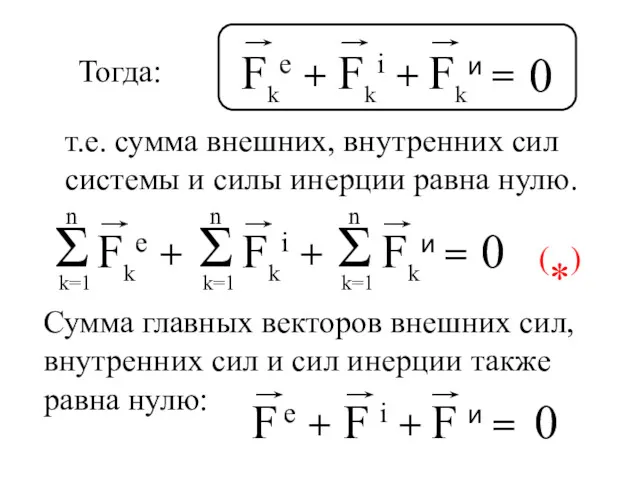
- 132. 0 Тогда: т.е. сумма внешних, внутренних сил системы и силы инерции равна нулю. 0 Сумма главных
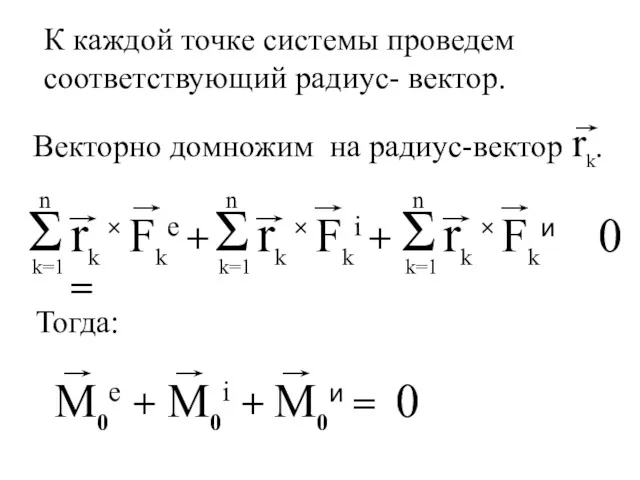
- 133. 0 0 К каждой точке системы проведем соответствующий радиус- вектор. Тогда:
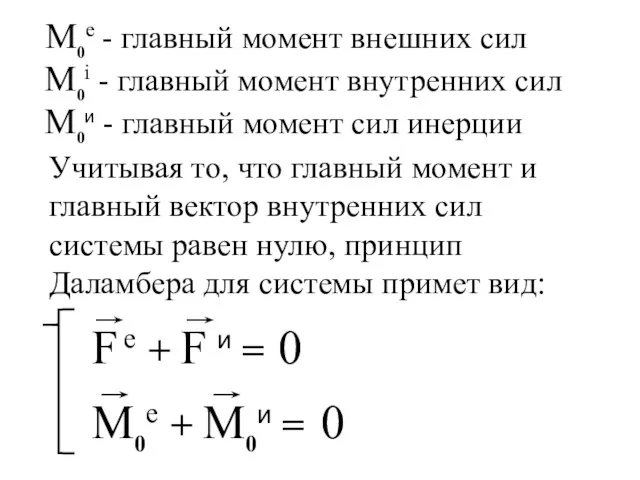
- 134. 0 0 M0e - главный момент внешних сил M0i - главный момент внутренних сил M0и -
- 135. Главный момент и главный вектор сил инерции
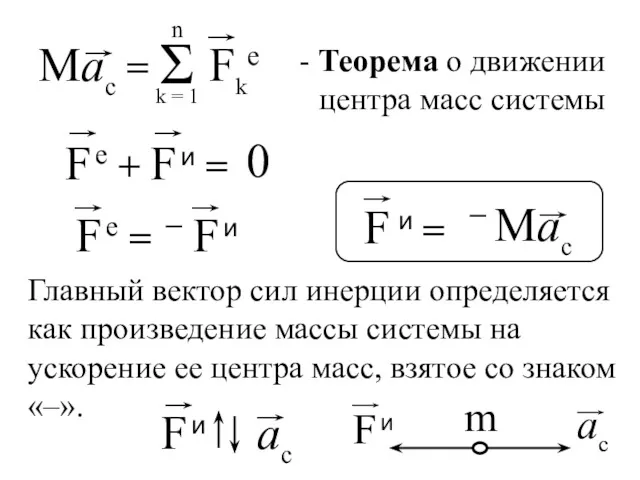
- 136. 0 m - Теорема о движении центра масс системы Главный вектор сил инерции определяется как произведение
- 137. Вращательное движение.
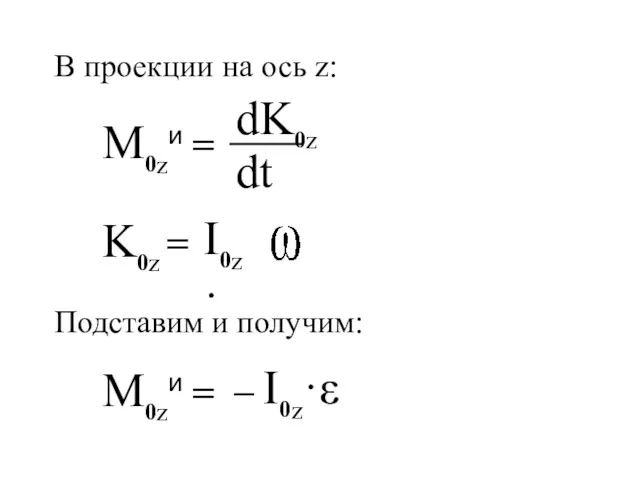
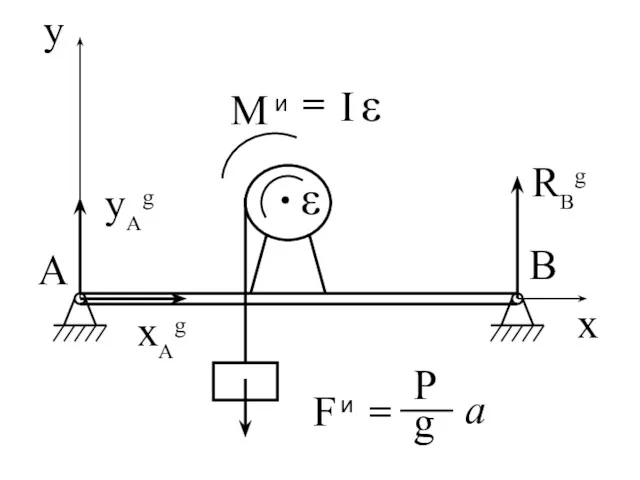
- 138. M0zи = K0z = I0z· M0zи = – I0z·ε Подставим и получим: В проекции на ось
- 139. Вращательное движение вокруг оси, проходящей через центр масс тела. 0 M0zи = – I0z·ε M0zи
- 140. Плоскопараллельное движение. Mczи = – Icz·ε В этом случае присутствуют и главный вектор и главный момент
- 141. P r ,I
- 143. Динамические реакции твердого тела, вращающегося вокруг неподвижной оси
- 144. = const AB = b
- 145. hc - кратчайшее расстояние от центра масс до оси вращения. Используем принцип Даламбера. Составляем условие равновесия
- 146. Мxe, Мye, Мze - алгебраические суммы проекций моментов внешних сил на оси x,y,z; Мxи, Мyи -
- 147. xA + xB + Fxe + Fxи = 0 zA + Fze + Fzи = 0
- 148. ac = 2 hc Fxи = M 2 hc· cos() = M 2
- 149. x y z Fx Fy Fz Для одной точки mx (Fkи) - момент относительно оси x
- 150. mx (Fkи) = y Fz – z Fy my (Fkи) = z Fx – x Fz
- 151. Mxи = – ( Σ mk y k z k) 2 = Mxи = (
- 152. xA + xB + Fxe + M 2 xc = 0 zA + Fze =
- 153. Iyz = Ixz = 0, Слагаемые, в которых присутствует угловая скорость будут являться динамическими реакциями. Эти
- 154. Аналитическая механика
- 155. Аналитическая механика Методы аналитической механики позволяют рассматривать системы без учета реакций идеальных связей
- 156. Виртуальные (возможные) перемещения
- 157. Классификация связей
- 158. 1) Удерживающие связи (x2–x1)2 + (y2–y1)2 + (z2–z1)2 = l2 Неудерживающие связи (x2–x1)2 + (y2–y1)2 +
- 159. 2) Стационарные связи Нестационарные связи 3) Голономные связи Неголономные связи В уравнении нет зависимости от времени.
- 160. Пример: 0 Неголономная нестационарная неудерживающая связь
- 161. f ( x, y, z, t ) = 0 M0 ( x0, y0, z0 ) x
- 162. f (x0 + x, y0 + y, z0 + z, t ) = = f (x0,
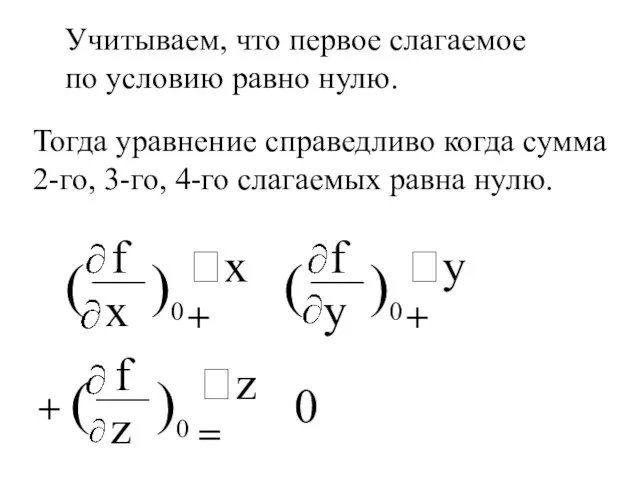
- 163. 0 Учитываем, что первое слагаемое по условию равно нулю. Тогда уравнение справедливо когда сумма 2-го, 3-го,
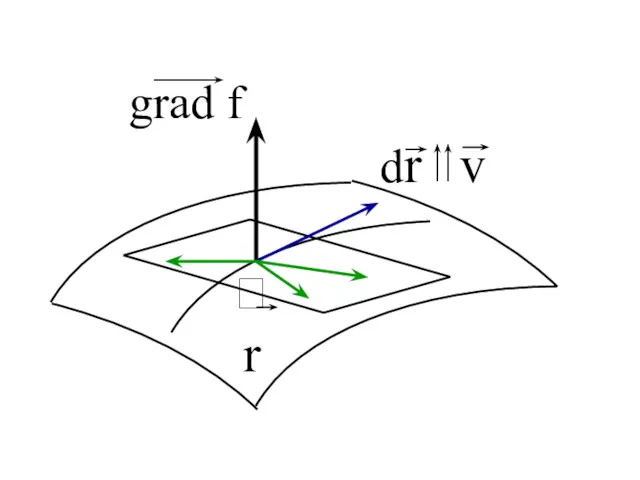
- 164. 0 т. е. => = 90°
- 166. Виртуальное перемещение - мнимое, происходящее в фиксированный момент времени, малое, не нарушающее уравнения связей с учетом
- 167. Виртуальная работа А = Дадим системе виртуальное перемещение и подсчитаем элементарную работу, произведенную силами на этих
- 168. Идеальные связи 0 Принцип виртуальных перемещений - связи, работа реакций которых на любом виртуальном перемещении равна
- 169. Для того, чтобы система, подчиненная идеальным стационарным удерживающим связям, находилась в равновесии, необходимо и достаточно, чтобы
- 170. Необходимость: 0 , v k = 0 0 0 0 => 0
- 171. Достаточность: 0 0 0 0 =>
- 172. Определить величину силы F, необходимую для равновесия. Решить, используя принцип виртуальных перемещений. Задача.
- 173. h x F – ?
- 174. 0 – F x – Fтр x + M2 g h = 0 h = x
- 175. F = M2 g tg – f (M2 + M2) g F x – Fтр
- 176. Использование принципа виртуальных перемещений для определения реакций связей
- 178. Общее уравнение динамики
- 179. Пусть система, состоящая из n-точек и подчиненная удерживающим голономным идеальным связям, движется. Освобождаемся от связей и
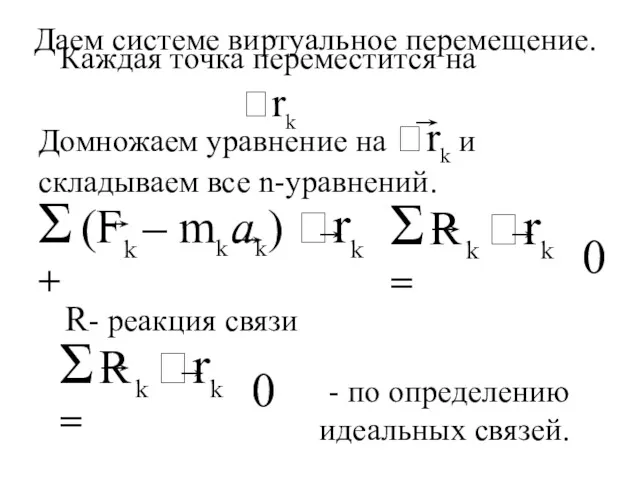
- 180. 0 0 Даем системе виртуальное перемещение. Каждая точка переместится на rk - по определению идеальных связей.
- 181. 0 - общее уравнение динамики. При движении материальной системы, подчиненной идеальным удерживающим голономным связям, сумма работ
- 182. Пример: P, Q, Q, – дано a3 – найти
- 183. O3
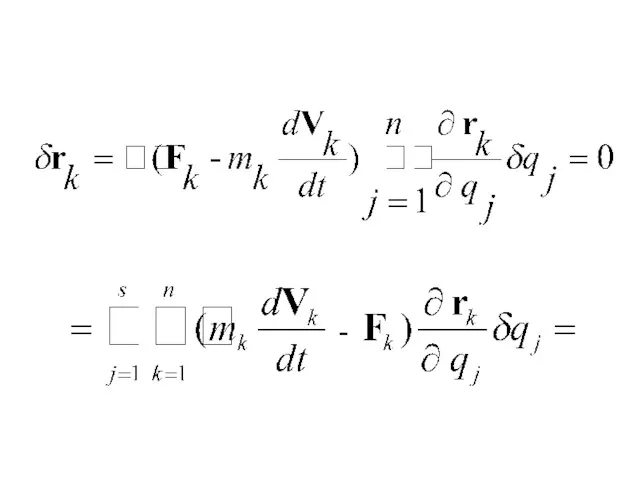
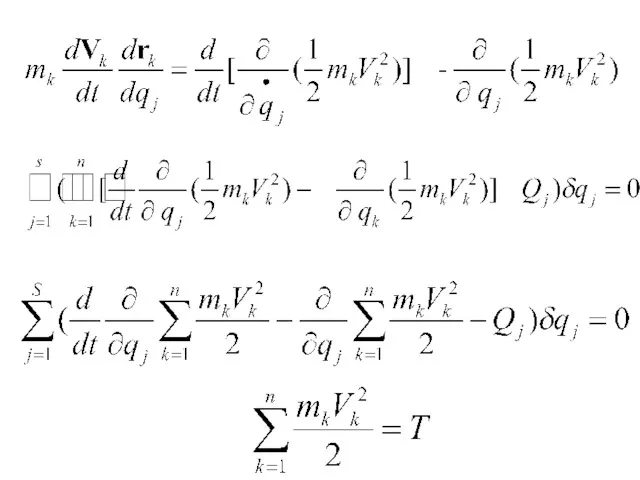
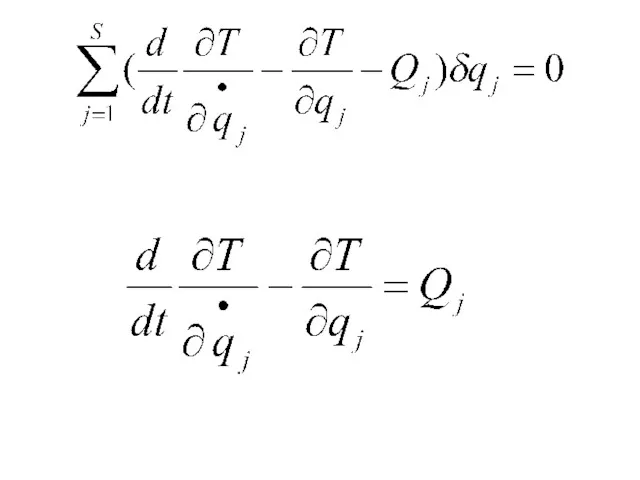
- 184. УРАВНЕНИЕ ЛАГРАНЖА II РОДА ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ: => - s- число степеней свободы
- 185. -
- 186. -ОБОБЩЕННАЯ СИЛА **
- 187. *
- 188. Изменим порядок дифференцирования
- 189. Вносим под знак частной производной
- 192. Изобразить на чертеже все активные силы, действующие на систему. Реакции идеальных связей можно не изображать. Силы
- 193. Вычислить кинетическую энергию системы, выразив ее через обобщенные координаты и скорости Найти обобщенные силы системы Выполнить
- 194. Стержень длиной l и массой m. A и B ползуны Составить уравнения движения стержня, найти его
- 195. Силы – mg Степень свободы – 1 обобщенная координата
- 196. 4) Обобщенные силы Потенциальная энергия
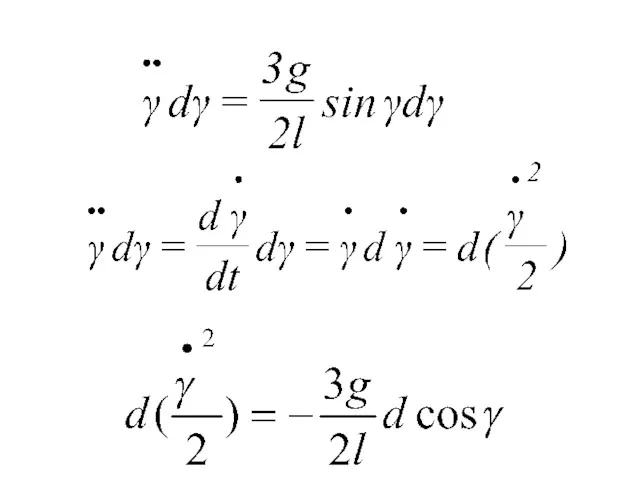
- 198. До множим уравнение
- 200. Интегрируем
- 201. Если в начальный момент времени
- 203. Скачать презентацию
Динамика - раздел теоретической механики, в котором изучаются движение тел под
Динамика - раздел теоретической механики, в котором изучаются движение тел под
Законы динамики.
Законы динамики.
1) І-ый закон Ньютона
Если на тело не действуют силы, то оно
1) І-ый закон Ньютона
Если на тело не действуют силы, то оно
2) ІІ-ой закон Ньютона
Ускорение движения тела пропорционально действующей на него силе
2) ІІ-ой закон Ньютона
Ускорение движения тела пропорционально действующей на него силе
3) ІІІ-ий закон Ньютона
Каждому действию соответствует равное и противоположно направленное противодействие
3) ІІІ-ий закон Ньютона
Каждому действию соответствует равное и противоположно направленное противодействие
4) Принцип
суперпозиции.
Если на тело действует несколько сил, то ускорение движения
4) Принцип
суперпозиции.
Если на тело действует несколько сил, то ускорение движения
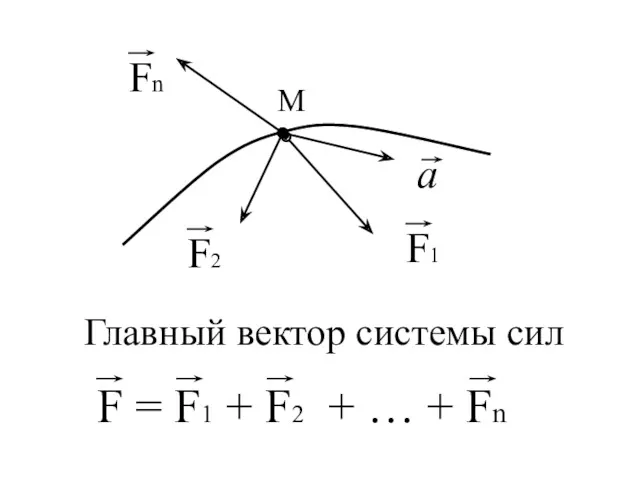
Главный вектор системы сил
Главный вектор системы сил
Дифференциальные уравнения движения точки.
Дифференциальные уравнения движения точки.
Дифференциальные уравнения движения точки в декартовой системе координат.
Дифференциальные уравнения движения точки в декартовой системе координат.

ox:
oy:
oz:
F1x +…+ Fnx
F1y +…+ Fny
F1z +…+ Fnz
Проецируем векторное
ox:
oy:
oz:
F1x +…+ Fnx
F1y +…+ Fny
F1z +…+ Fnz
Проецируем векторное
ax =
ay =
az =
Проекции ускорений:
ax =
ay =
az =
Проекции ускорений:
Σ Fkx
Σ Fky
Σ Fkz
дифференциальные уравнения
движения точки в декартовой с. к.
Σ Fkx
Σ Fky
Σ Fkz
дифференциальные уравнения
движения точки в декартовой с. к.

Дифференциальные уравнения движения точки в осях естественного трехгранника.
Дифференциальные уравнения движения точки в осях естественного трехгранника.
Запишем ІІ-ой закон Ньютона:
Запишем ІІ-ой закон Ньютона:
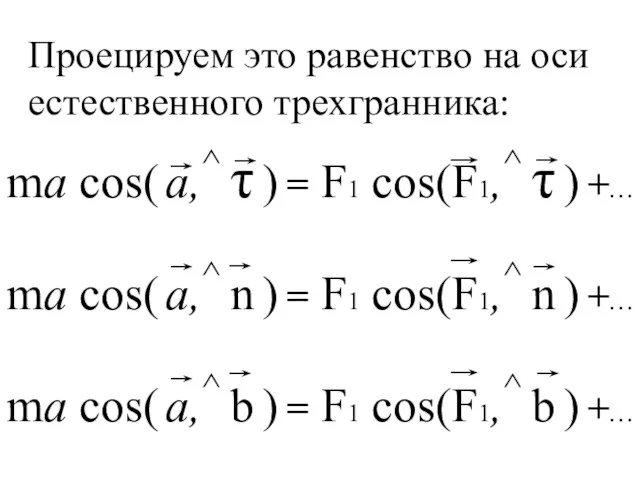
Проецируем это равенство на оси естественного трехгранника:
Проецируем это равенство на оси естественного трехгранника:
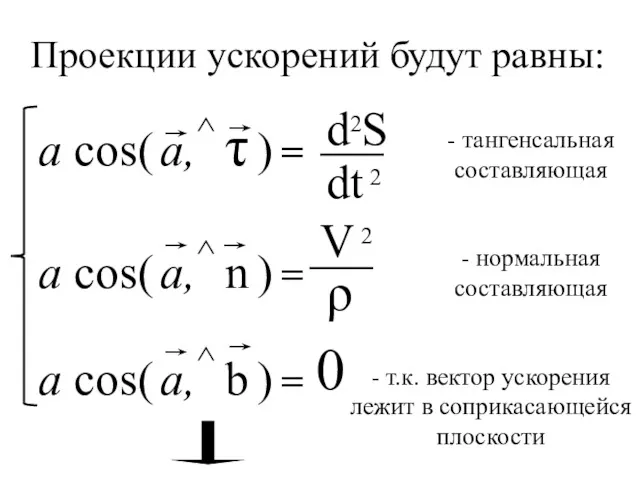
0
- тангенсальная составляющая
- нормальная составляющая
- т.к. вектор ускорения лежит в
0
- тангенсальная составляющая
- нормальная составляющая
- т.к. вектор ускорения лежит в
дифференциальные уравнения
движения точки в осях
естественного трехгранника
дифференциальные уравнения
движения точки в осях
естественного трехгранника
Задачи динамики
Задачи динамики
Прямая задача
По известной массе, известному закону движения требуется определить результирующую силу,
Прямая задача
По известной массе, известному закону движения требуется определить результирующую силу,
Дано:
m
x = x(t)
y = y(t)
z = z(t)
Найти:
F - ?
Дано:
m
x = x(t)
y = y(t)
z = z(t)
Найти:
F - ?
Решение:
Fx
Fy
Fz
F =
- модуль силы
Решение:
Fx
Fy
Fz
F =
- модуль силы
Направление задается направляющими косинусами:
Направление задается направляющими косинусами:
Обратная задача
По известной массе, известным силам, известным начальным условиям требуется определить
Обратная задача
По известной массе, известным силам, известным начальным условиям требуется определить
Для того, чтобы получить закон движения, необходимо дважды проинтегрировать каждое уравнение,
Для того, чтобы получить закон движения, необходимо дважды проинтегрировать каждое уравнение,
Σ Fky
mg
g
Vy ,
g
y - ?
Запишем закон движения в проекции на ось
Σ Fky
mg
g
Vy ,
g
y - ?
Запишем закон движения в проекции на ось
Vy =
g t
g t
y =
=>
Vy =
g t
g t
y =
=>
Динамика системы
Динамика системы
Внешние силы
Внутренние силы
- силы, действующие на тела данной системы со стороны
Внешние силы
Внутренние силы
- силы, действующие на тела данной системы со стороны
Главный вектор внутренних сил системы равен нулю.
Главный момент внутренних сил системы
Главный вектор внутренних сил системы равен нулю.
Главный момент внутренних сил системы
Масса. Центр масс.
Масса. Центр масс.
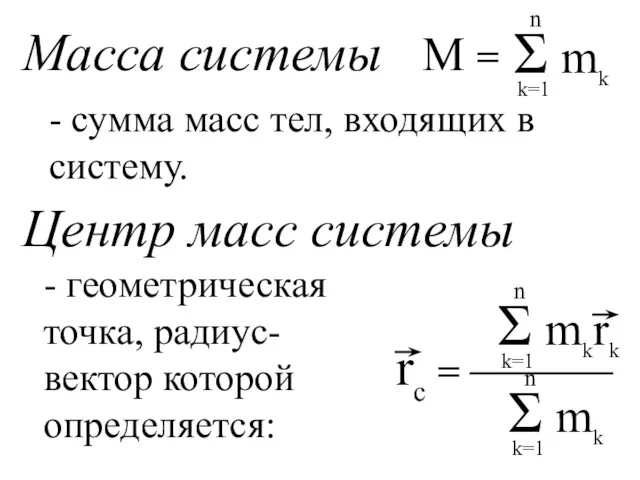
Масса системы
М =
Центр масс системы
- сумма масс тел, входящих в систему.
-
Масса системы
М =
Центр масс системы
- сумма масс тел, входящих в систему.
-
Для того, чтобы получить координаты центра масс, надо спроецировать векторное равенство
Для того, чтобы получить координаты центра масс, надо спроецировать векторное равенство
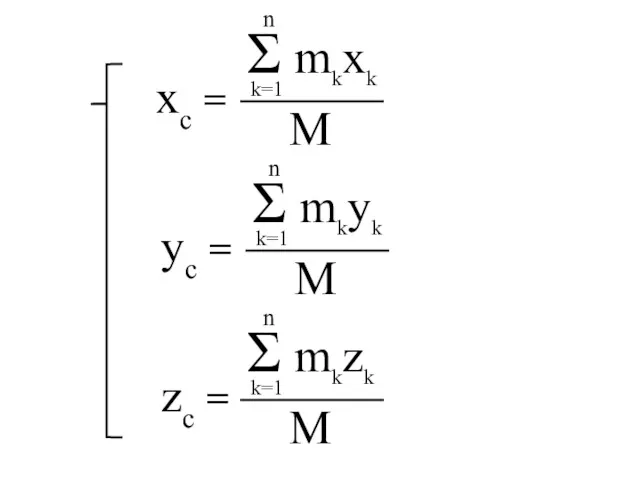
xc =
zc =
yc =
xc =
zc =
yc =
Дифференциальные уравнение движения системы
Дифференциальные уравнение движения системы

Теорема об изменении количества движения
Теорема об изменении количества движения
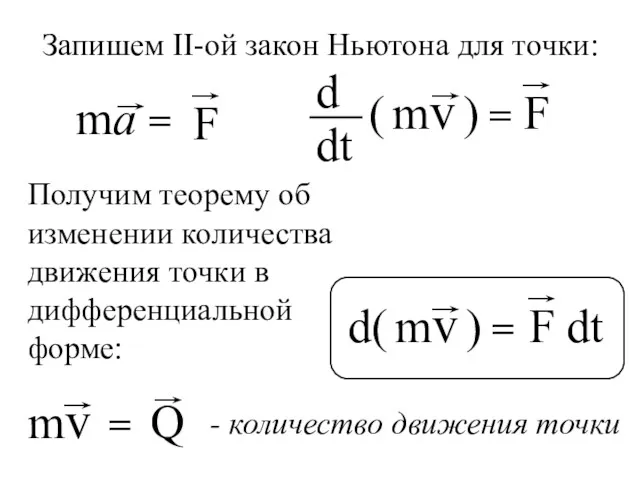
Запишем ІІ-ой закон Ньютона для точки:
Получим теорему об изменении количества движения
Запишем ІІ-ой закон Ньютона для точки:
Получим теорему об изменении количества движения
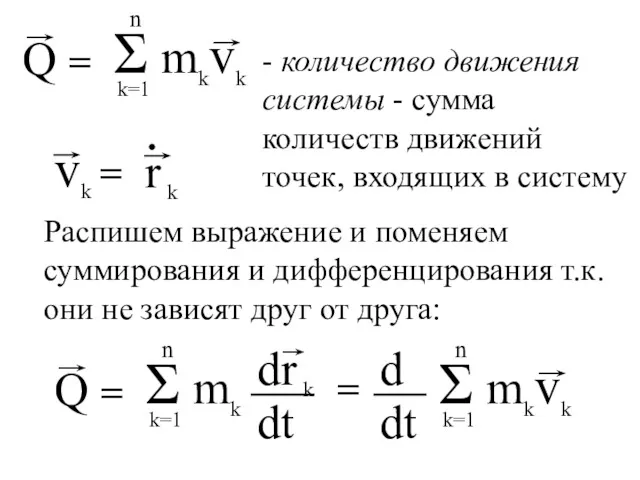
- количество движения системы - сумма количеств движений точек, входящих в
- количество движения системы - сумма количеств движений точек, входящих в
=>
- количество движения системы - произведение массы системы и скорости ее
=>
- количество движения системы - произведение массы системы и скорости ее
Запишем ІІ-ой закон Ньютона для системы точек:
Меняя порядок суммирования и дифференцирования
Запишем ІІ-ой закон Ньютона для системы точек:
Меняя порядок суммирования и дифференцирования
Первая производная по времени от вектора количества движения системы равна главному
Первая производная по времени от вектора количества движения системы равна главному
Следствия :
1)
2)
Если главный вектор внешних сил системы равен нулю, то тело
Следствия :
1)
2)
Если главный вектор внешних сил системы равен нулю, то тело
Fxe
Fye
Fze
Fxe
Fye
Fze
Теорема о движении центра масс системы
Теорема о движении центра масс системы
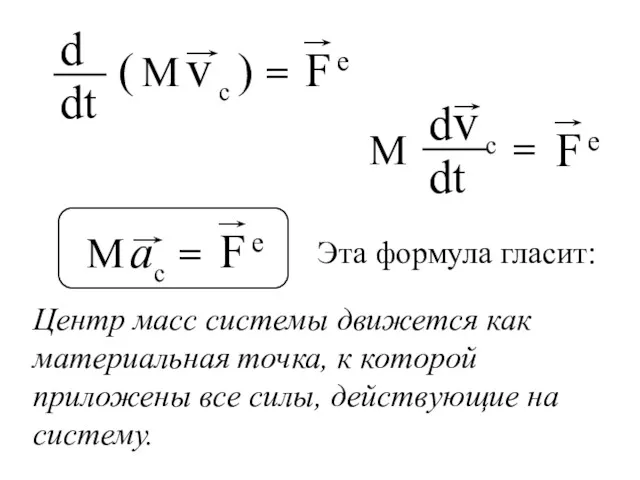
Эта формула гласит:
Центр масс системы движется как материальная точка, к которой
Эта формула гласит:
Центр масс системы движется как материальная точка, к которой
Следствия :
1)
2)
Внутренними силами нельзя изменить движение центра масс системы.
Если главный вектор
Следствия :
1)
2)
Внутренними силами нельзя изменить движение центра масс системы.
Если главный вектор
3)
m ac x =
Fxe
Fye
Fze
m ac y =
m ac z =
Если проекция
3)
m ac x =
Fxe
Fye
Fze
m ac y =
m ac z =
Если проекция
Теорема об изменении момента количества движения
Теорема об изменении момента количества движения
По ІІ закону ньютона
Пусть r - радиус-вектор, определяющий положение точки относительно
По ІІ закону ньютона
Пусть r - радиус-вектор, определяющий положение точки относительно
Обозначим:
- момент количества движения точки относительно точки О
- момент силы F
Обозначим:
- момент количества движения точки относительно точки О
- момент силы F
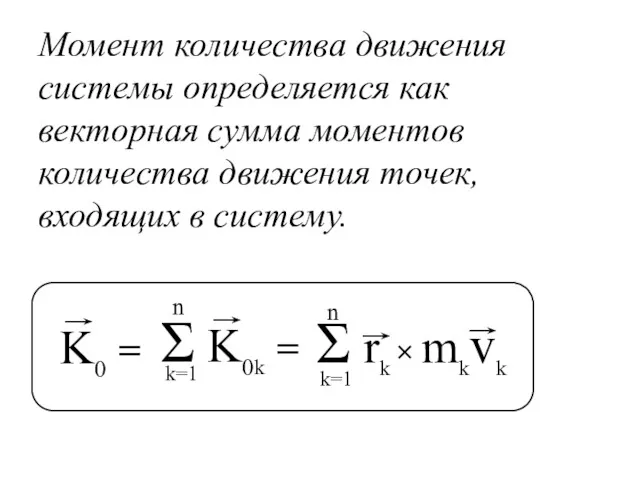
Момент количества движения системы определяется как векторная сумма моментов количества движения
Момент количества движения системы определяется как векторная сумма моментов количества движения
Момент количества движения твердого тела, вращающегося вокруг неподвижной оси
(кинетический момент)
Момент количества движения твердого тела, вращающегося вокруг неподвижной оси
(кинетический момент)
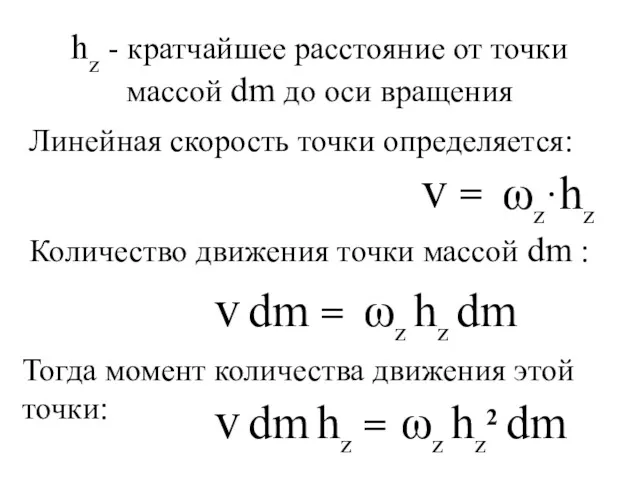
v =
ωz·hz
v dm =
ωz hz dm
v dm hz =
ωz hz2 dm
hz
v =
ωz·hz
v dm =
ωz hz dm
v dm hz =
ωz hz2 dm
hz
Kz =
I =
Kz =
Iz ·ωz
- момент инерции тела относительно оси (осевой
Kz =
I =
Kz =
Iz ·ωz
- момент инерции тела относительно оси (осевой
Моменты инерции
Моменты инерции
Осевой момент инерции точки
Izk =
dm·hz2 =
dm(x2 + y2)
Iz =
- для точки
-
Осевой момент инерции точки
Izk =
dm·hz2 =
dm(x2 + y2)
Iz =
- для точки
-
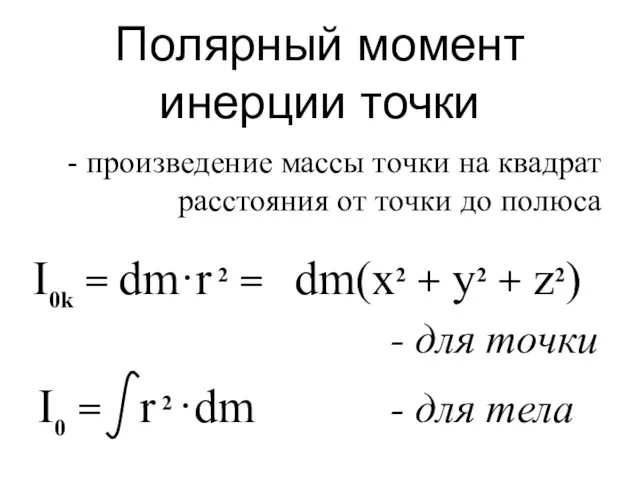
Полярный момент инерции точки
I0k =
dm·r 2 =
dm(x2 + y2 + z2)
I0
Полярный момент инерции точки
I0k =
dm·r 2 =
dm(x2 + y2 + z2)
I0
Центробежные моменты инерции
- произведение массы точки на координаты, стоящие в индексе
Центробежные моменты инерции
- произведение массы точки на координаты, стоящие в индексе
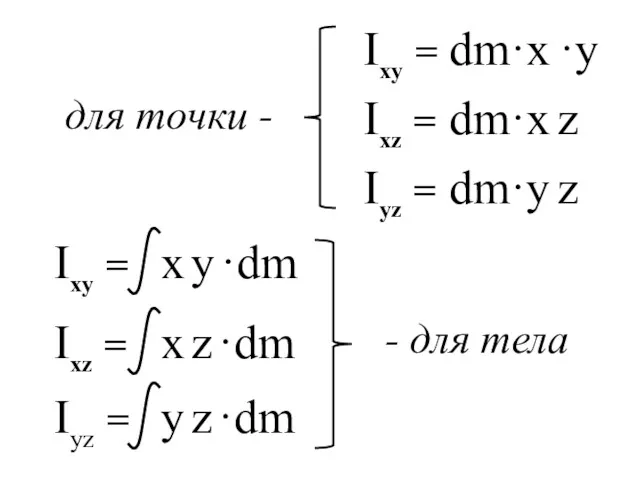
Ixy =
Ixz =
Iyz =
- для тела
Ixy =
dm·x ·y
Ixz =
dm·x z
Iyz
Ixy =
Ixz =
Iyz =
- для тела
Ixy =
dm·x ·y
Ixz =
dm·x z
Iyz
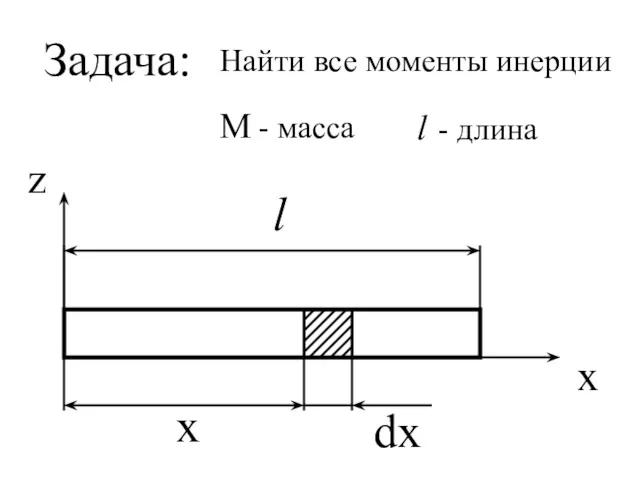
Задача:
М - масса
l - длина
Найти все моменты инерции
Задача:
М - масса
l - длина
Найти все моменты инерции
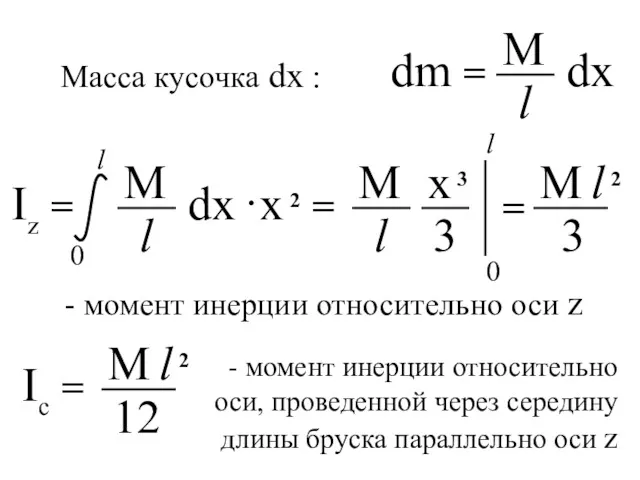
dm =
Iz =
Ic =
Масса кусочка dx :
- момент инерции относительно оси
dm =
Iz =
Ic =
Масса кусочка dx :
- момент инерции относительно оси
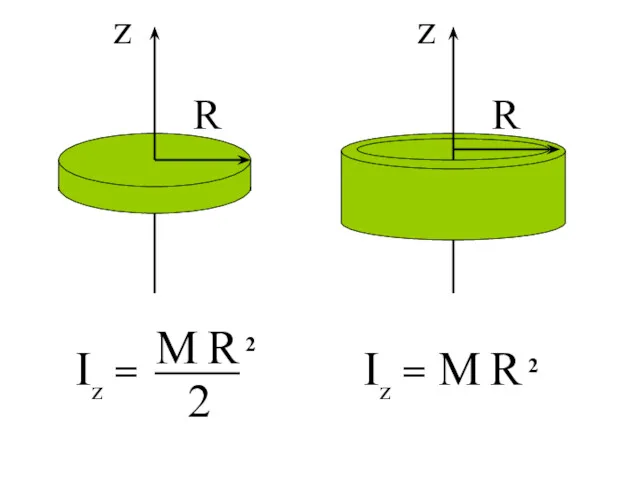
Iz =
Iz =
M R 2
Iz =
Iz =
M R 2
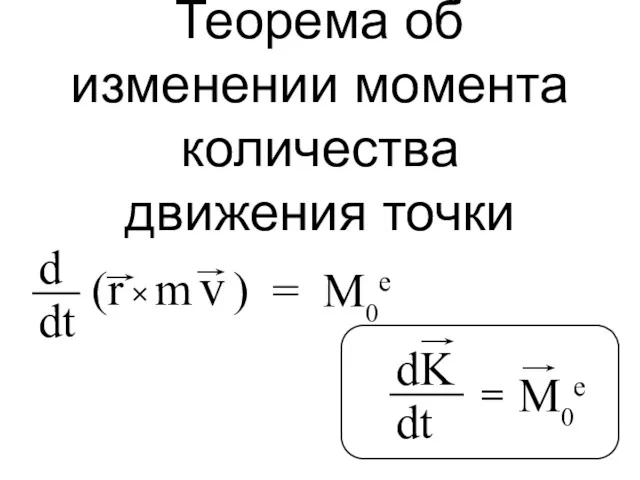
Теорема об изменении момента количества движения точки
= M0e
Теорема об изменении момента количества движения точки
= M0e
Производная по времени от вектора момента количества движения точки равна моменту
Производная по времени от вектора момента количества движения точки равна моменту
. . . . . . . . . . .
. . . . . . . . . . .
Почленно сложим уравнения системы:
Почленно сложим уравнения системы:
Следствия :
1)
2)
Внутренними силами нельзя изменить момент количества движения системы.
Если главный момент
Следствия :
1)
2)
Внутренними силами нельзя изменить момент количества движения системы.
Если главный момент
3)
Mxe
Mze
Mye
Если проекция главного момента внешних сил на какую-либо ось равна нулю,
3)
Mxe
Mze
Mye
Если проекция главного момента внешних сил на какую-либо ось равна нулю,
Дифференциальное уравнение движения твердого тела относительно неподвижной оси
Дифференциальное уравнение движения твердого тела относительно неподвижной оси
Mze
Mze
Mze
Kz =
Iz ·ωz
Mze
Mze
Mze
Kz =
Iz ·ωz
Работа силы
Работа силы
Прямолинейное перемещение
тела.
Прямолинейное перемещение
тела.
Перемещение тела по кривой.
Перемещение тела по кривой.
Если точка перемещается по кривой и сила изменяется, то для того
Если точка перемещается по кривой и сила изменяется, то для того
Δ S
Δ S
Тогда работа , произведенная силой на k-ом участке определится как:
Ak =
Вся
Тогда работа , произведенная силой на k-ом участке определится как:
Ak =
Вся
A1,2 =
Элементарная работа:
Работа определяется точно криволинейным интегралом:
A1,2 =
Элементарная работа:
Работа определяется точно криволинейным интегралом:
Работа силы, постоянной по величине и направлению.
Работа силы, постоянной по величине и направлению.
A1,2 =
A1,2 =
где: S = M1M2
Тогда работа равна:
A1,2 =
A1,2 =
где: S = M1M2
Тогда работа равна:
Работа силы тяжести.
Работа силы тяжести.
A1,2 =
Изменение положения тела по высоте определяется:
Тогда работа на участке равна:
Если
A1,2 =
Изменение положения тела по высоте определяется:
Тогда работа на участке равна:
Если
Работа силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси.
Работа силы, приложенной к твердому телу, вращающемуся вокруг неподвижной оси.
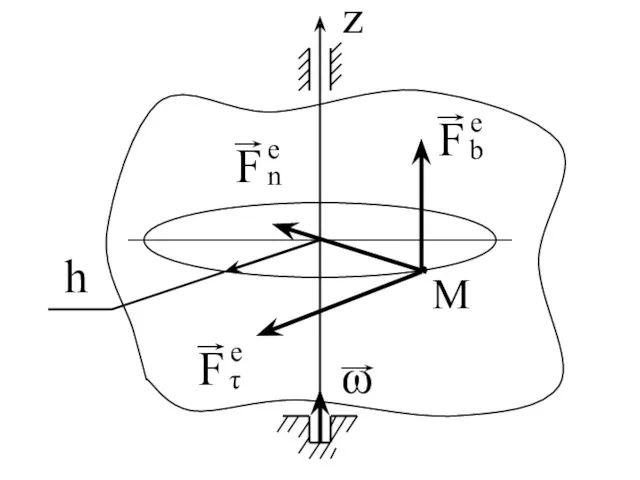
h - кратчайшее расстояние от точки до оси вращения. Сила F
h - кратчайшее расстояние от точки до оси вращения. Сила F
Полная работа:
Элементарная работа силы Fτe :
Работа силы Fbe также равна нулю.
Полная работа:
Элементарная работа силы Fτe :
Работа силы Fbe также равна нулю.
Если:
- работа момента
Если:
- работа момента
Пример
Центр тяжести однородного колеса поднимается на высоту h, под действием момента
Пример
Центр тяжести однородного колеса поднимается на высоту h, под действием момента
H
S
H
S
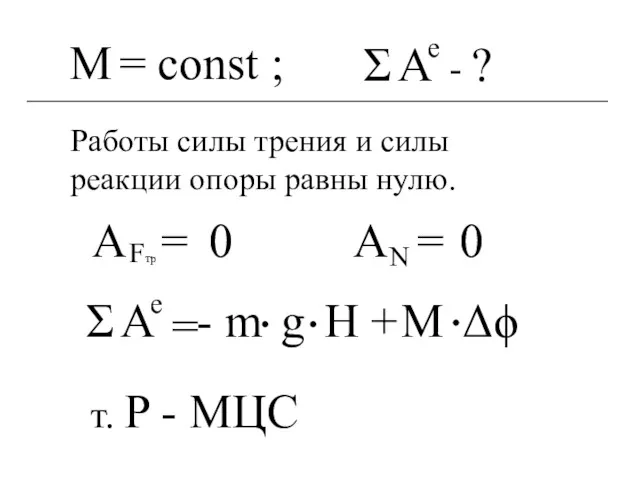
M = const ;
т. P - МЦС
Работы силы трения и
M = const ;
т. P - МЦС
Работы силы трения и
ω =
ϕ =
Интегрируя, получим:
ω =
ϕ =
Интегрируя, получим:
Кинетическая энергия
Кинетическая энергия
Кинетическая энергия точки
Кинетическая энергия точки
Для точки второй закон Ньютона выглядит так:
Для точки второй закон Ньютона выглядит так:
d'A
T =
- Теорема об изменении кинетической энергии точки в дифференциальной форме.
Заменим
d'A
T =
- Теорема об изменении кинетической энергии точки в дифференциальной форме.
Заменим
T =
Кинетическая энергия системы определяется как сумма кинетических энергий точек, входящих
T =
Кинетическая энергия системы определяется как сумма кинетических энергий точек, входящих
Кинетическая энергия системы.
(Теорема Кёнига)
Кинетическая энергия системы.
(Теорема Кёнига)

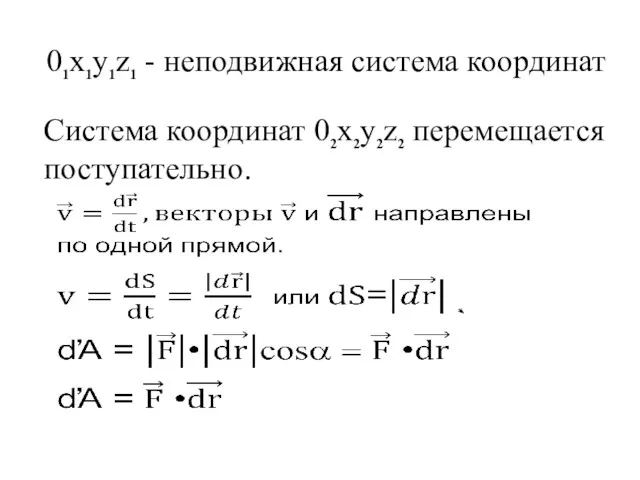
01x1y1z1 - неподвижная система координат
Система координат 02x2y2z2 перемещается поступательно.
01x1y1z1 - неподвижная система координат
Система координат 02x2y2z2 перемещается поступательно.
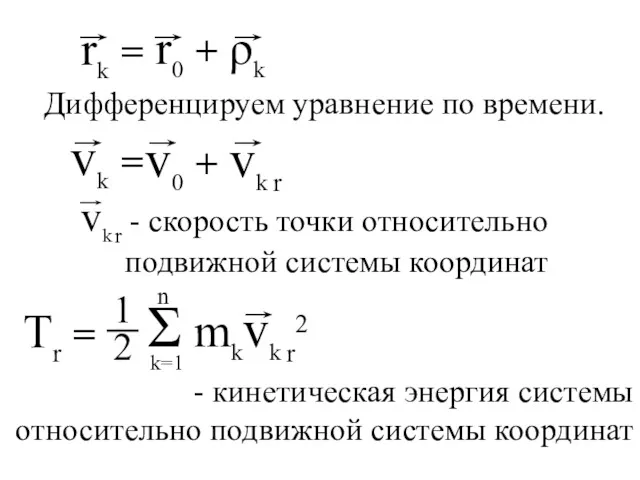
Tr =
Дифференцируем уравнение по времени.
- кинетическая энергия системы относительно подвижной системы
Tr =
Дифференцируем уравнение по времени.
- кинетическая энергия системы относительно подвижной системы
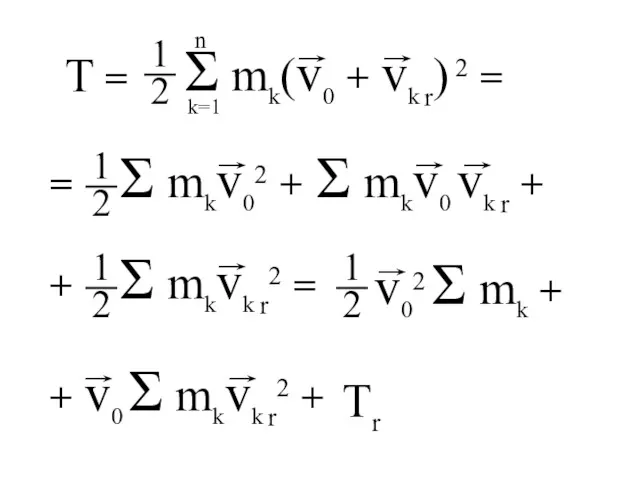
Tr
T =
Tr
T =
Дифференцируем повремени:
Дифференцируем повремени:
T =
Tr
0
Совместим начало подвижной системы координат с центром масс системы:
T =
Tr
0
Совместим начало подвижной системы координат с центром масс системы:
T =
Tr
Кинетическая энергия системы равна сумме кинетической энергии поступательного движения центра
T =
Tr
Кинетическая энергия системы равна сумме кинетической энергии поступательного движения центра
Кинетическая энергия твёрдого тела
Кинетическая энергия твёрдого тела
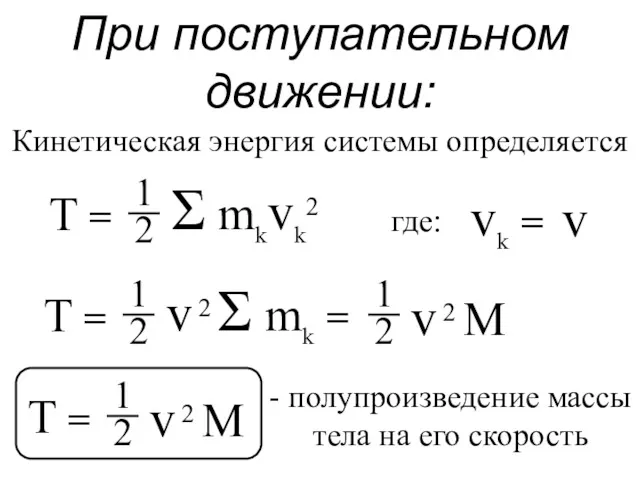
При поступательном движении:
T =
T =
T =
Кинетическая энергия системы определяется
- полупроизведение массы
При поступательном движении:
T =
T =
T =
Кинетическая энергия системы определяется
- полупроизведение массы
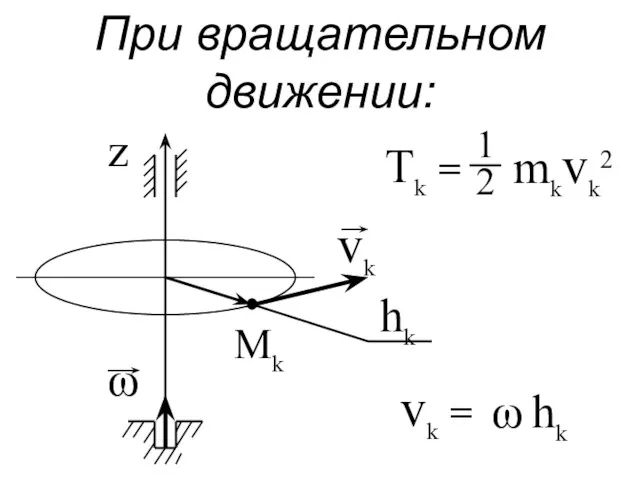
При вращательном движении:
Tk =
vk =
ω hk
При вращательном движении:
Tk =
vk =
ω hk
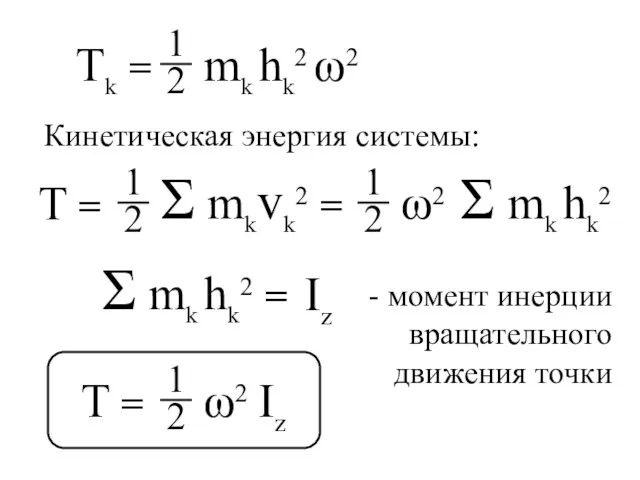
Tk =
T =
Σ mk hk2 =
Iz
T =
Кинетическая энергия системы:
- момент инерции
Tk =
T =
Σ mk hk2 =
Iz
T =
Кинетическая энергия системы:
- момент инерции
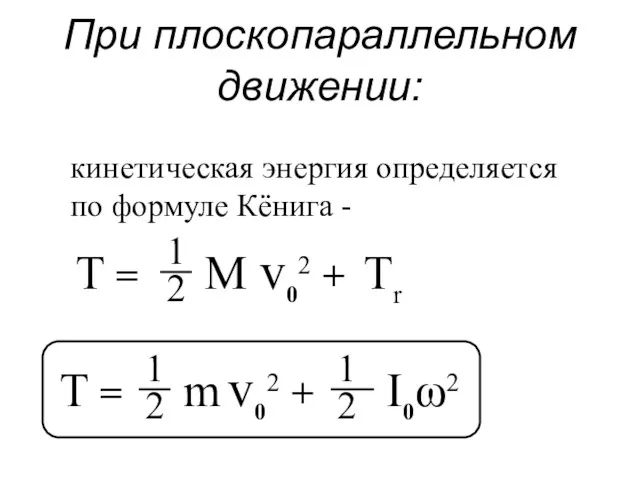
При плоскопараллельном движении:
T =
Tr
T =
кинетическая энергия определяется по формуле Кёнига -
При плоскопараллельном движении:
T =
Tr
T =
кинетическая энергия определяется по формуле Кёнига -
Пример
Дано: r, m-радиус и масса однородного диска. Vc- скорость центра масс
Пример
Дано: r, m-радиус и масса однородного диска. Vc- скорость центра масс
Теорема об изменении кинетической энергии системы
Теорема об изменении кинетической энергии системы
Пусть система состоит из n-материальных точек.
Делим все силы, действующие на систему,
Пусть система состоит из n-материальных точек.
Делим все силы, действующие на систему,
dA1e + dA1i
dAne + dAni
. . . . . . .
dA1e + dA1i
dAne + dAni
. . . . . . .

dAe + dAi
dT =
dAe + dAi
- теорема об изменении кинетической энергии
dAe + dAi
dT =
dAe + dAi
- теорема об изменении кинетической энергии
T - T0 =
Ae + Ai
Если под действием внешних и внутренних
T - T0 =
Ae + Ai
Если под действием внешних и внутренних
Изменение кинетической энергии системы при перемещении ее из начального положения в
Изменение кинетической энергии системы при перемещении ее из начального положения в
Принцип Даламбера
или
Принцип кинетостатики
Принцип Даламбера
или
Принцип кинетостатики
Для каждой k-ой точки можно записать ІІ-ой закон Ньютона:
Система состоит из
Для каждой k-ой точки можно записать ІІ-ой закон Ньютона:
Система состоит из
0
Тогда:
т.е. сумма внешних, внутренних сил системы и силы инерции равна нулю.
0
Сумма
0
Тогда:
т.е. сумма внешних, внутренних сил системы и силы инерции равна нулю.
0
Сумма
0
0
К каждой точке системы проведем соответствующий радиус- вектор.
Тогда:
0
0
К каждой точке системы проведем соответствующий радиус- вектор.
Тогда:
0
0
M0e - главный момент внешних сил
M0i - главный момент внутренних сил
M0и
0
0
M0e - главный момент внешних сил
M0i - главный момент внутренних сил
M0и
Главный момент и главный вектор сил инерции
Главный момент и главный вектор сил инерции
0
m
- Теорема о движении центра масс системы
Главный вектор сил инерции определяется
0
m
- Теорема о движении центра масс системы
Главный вектор сил инерции определяется
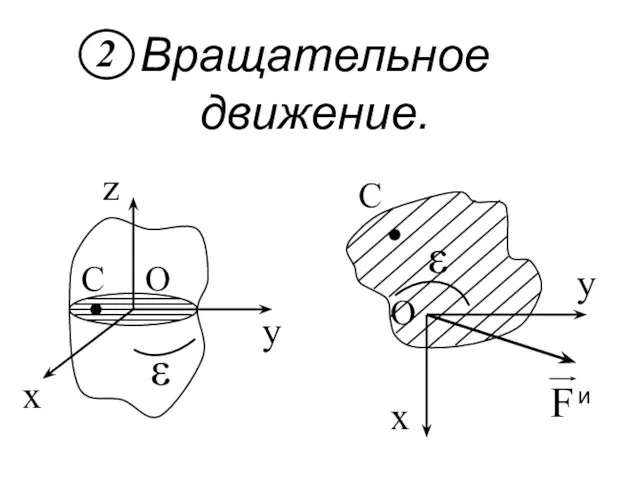
Вращательное движение.
Вращательное движение.
M0zи =
K0z =
I0z·
M0zи =
– I0z·ε
Подставим и получим:
В проекции на ось z:
M0zи =
K0z =
I0z·
M0zи =
– I0z·ε
Подставим и получим:
В проекции на ось z:
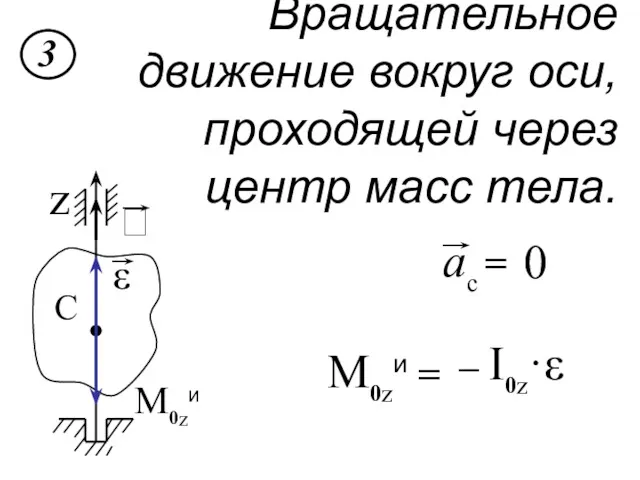
Вращательное движение вокруг оси, проходящей через центр масс тела.
0
M0zи =
– I0z·ε
M0zи
Вращательное движение вокруг оси, проходящей через центр масс тела.
0
M0zи =
– I0z·ε
M0zи
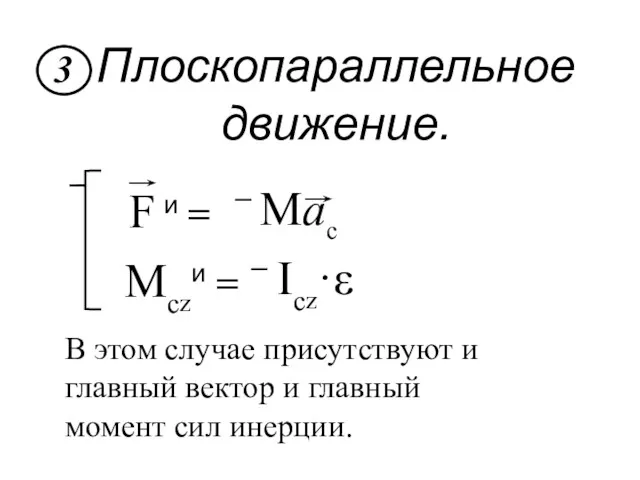
Плоскопараллельное движение.
Mczи =
– Icz·ε
В этом случае присутствуют и главный вектор и
Плоскопараллельное движение.
Mczи =
– Icz·ε
В этом случае присутствуют и главный вектор и
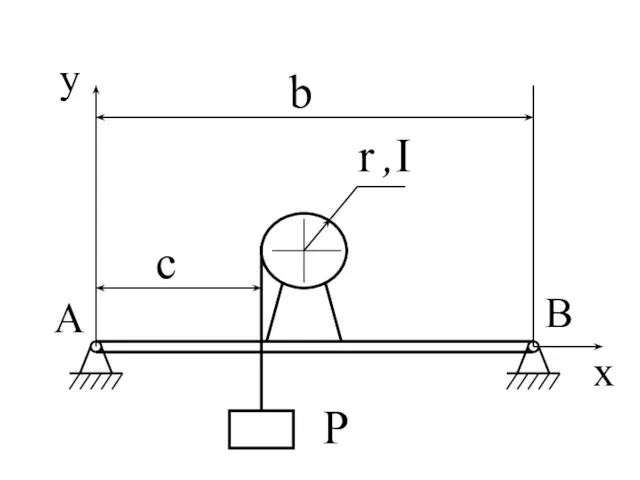
P
r ,I
P
r ,I

Динамические реакции твердого тела, вращающегося вокруг неподвижной оси
Динамические реакции твердого тела, вращающегося вокруг неподвижной оси
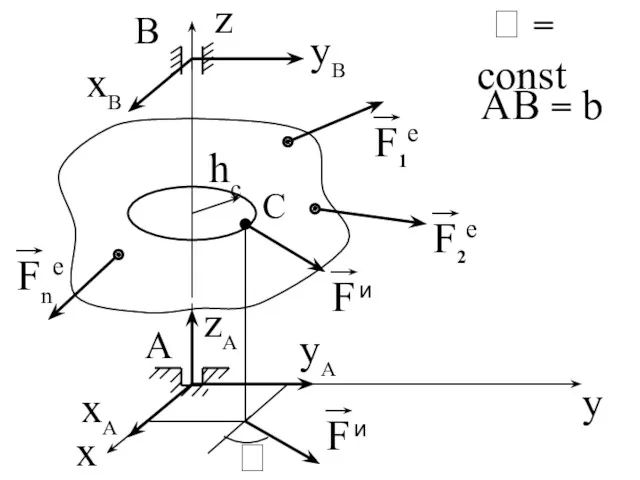
= const
AB = b
= const
AB = b
hc - кратчайшее расстояние от центра масс до оси вращения.
Используем принцип
hc - кратчайшее расстояние от центра масс до оси вращения.
Используем принцип
Мxe, Мye, Мze - алгебраические суммы проекций моментов внешних сил на
Мxe, Мye, Мze - алгебраические суммы проекций моментов внешних сил на

xA +
xB +
Fxe +
Fxи =
0
zA +
Fze +
Fzи =
0
– yB b +
Mxe
xA +
xB +
Fxe +
Fxи =
0
zA +
Fze +
Fzи =
0
– yB b +
Mxe
ac =
2 hc
Fxи =
M 2 hc·
cos() =
M 2
ac =
2 hc
Fxи =
M 2 hc·
cos() =
M 2
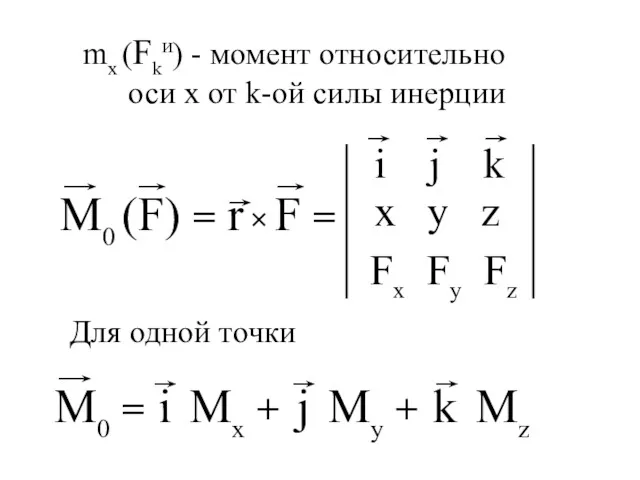
x y z
Fx Fy Fz
Для одной точки
mx (Fkи) - момент относительно
x y z
Fx Fy Fz
Для одной точки
mx (Fkи) - момент относительно
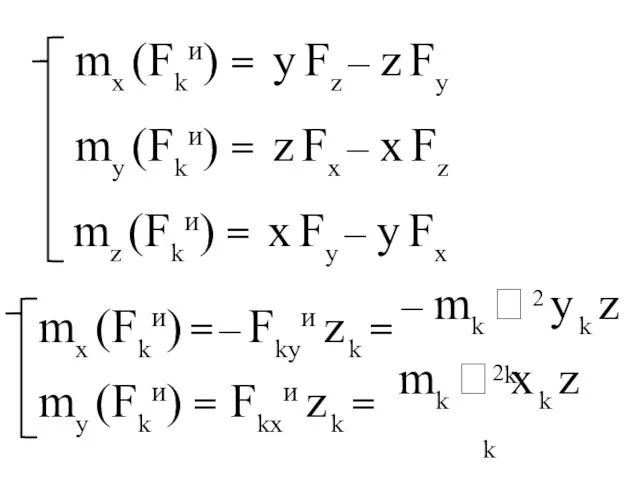
mx (Fkи) =
y Fz – z Fy
my (Fkи) =
z Fx –
mx (Fkи) =
y Fz – z Fy
my (Fkи) =
z Fx –
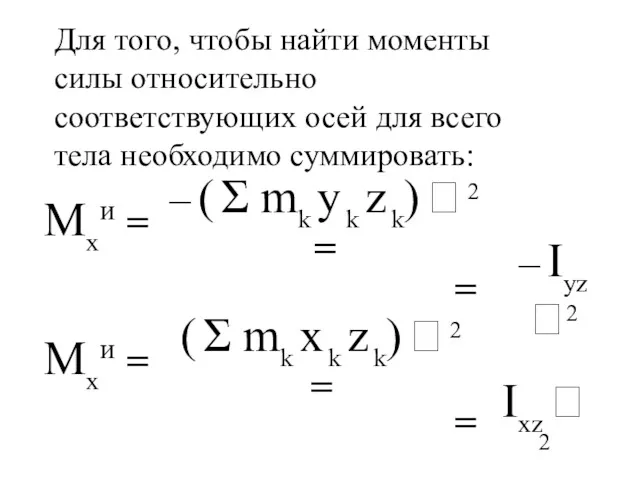
Mxи =
– ( Σ mk y k z k) 2
Mxи =
– ( Σ mk y k z k) 2
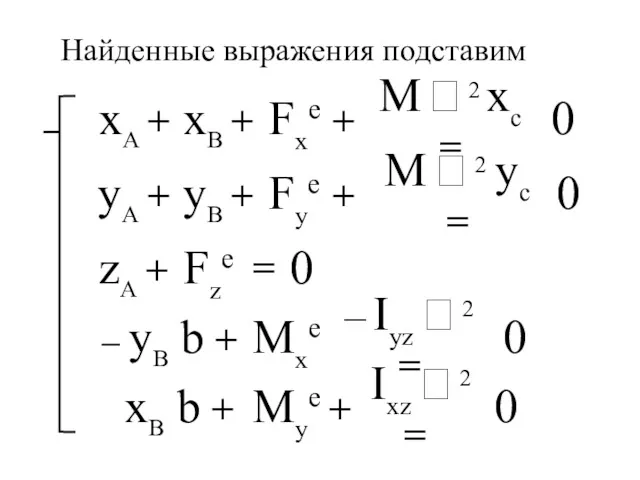
xA +
xB +
Fxe +
M 2 xc =
0
zA +
Fze
=
0
– yB b
xA +
xB +
Fxe +
M 2 xc =
0
zA +
Fze
=
0
– yB b
Iyz = Ixz = 0,
Слагаемые, в которых присутствует угловая скорость будут
Iyz = Ixz = 0,
Слагаемые, в которых присутствует угловая скорость будут
Аналитическая механика
Аналитическая механика
Аналитическая механика
Методы аналитической механики позволяют рассматривать системы без учета реакций идеальных
Аналитическая механика
Методы аналитической механики позволяют рассматривать системы без учета реакций идеальных
Виртуальные (возможные) перемещения
Виртуальные (возможные) перемещения
Классификация связей
Классификация связей
1)
Удерживающие связи
(x2–x1)2 + (y2–y1)2 + (z2–z1)2
= l2
Неудерживающие связи
(x2–x1)2 + (y2–y1)2 +
1)
Удерживающие связи
(x2–x1)2 + (y2–y1)2 + (z2–z1)2
= l2
Неудерживающие связи
(x2–x1)2 + (y2–y1)2 +
2)
Стационарные связи
Нестационарные связи
3)
Голономные связи
Неголономные связи
В уравнении нет зависимости от времени.
В уравнении
2)
Стационарные связи
Нестационарные связи
3)
Голономные связи
Неголономные связи
В уравнении нет зависимости от времени.
В уравнении
Пример:
0
Неголономная
нестационарная
неудерживающая связь
Пример:
0
Неголономная
нестационарная
неудерживающая связь
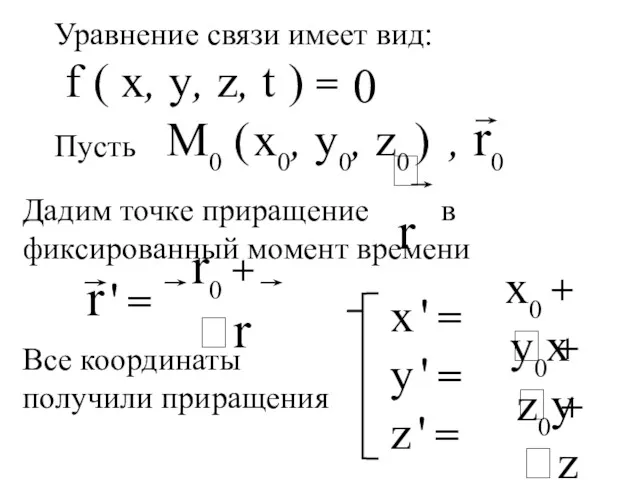
f ( x, y, z, t ) =
0
M0 ( x0, y0,
f ( x, y, z, t ) =
0
M0 ( x0, y0,
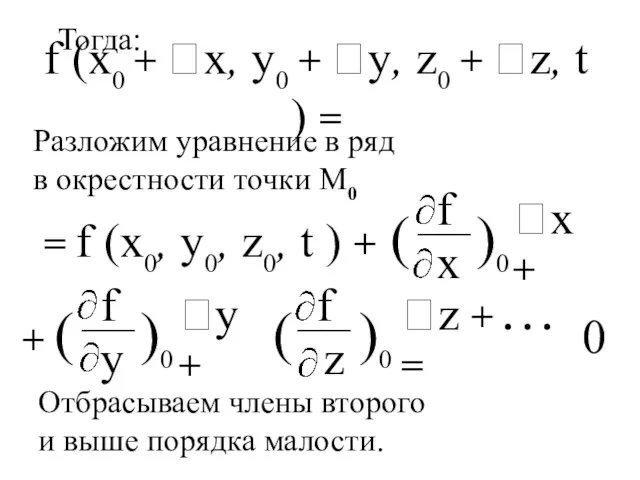
f (x0 + x, y0 + y, z0 + z, t
f (x0 + x, y0 + y, z0 + z, t
0
Учитываем, что первое слагаемое по условию равно нулю.
Тогда уравнение справедливо когда
0
Учитываем, что первое слагаемое по условию равно нулю.
Тогда уравнение справедливо когда

0
т. е.
=>
=
90°
0
т. е.
=>
=
90°
Виртуальное перемещение - мнимое, происходящее в фиксированный момент времени, малое, не
Виртуальное перемещение - мнимое, происходящее в фиксированный момент времени, малое, не
Виртуальная работа
А =
Дадим системе виртуальное перемещение и подсчитаем элементарную работу, произведенную
Виртуальная работа
А =
Дадим системе виртуальное перемещение и подсчитаем элементарную работу, произведенную
Идеальные связи
0
Принцип виртуальных перемещений
- связи, работа реакций которых на любом виртуальном
Идеальные связи
0
Принцип виртуальных перемещений
- связи, работа реакций которых на любом виртуальном
Для того, чтобы система, подчиненная идеальным стационарным удерживающим связям, находилась в
Для того, чтобы система, подчиненная идеальным стационарным удерживающим связям, находилась в
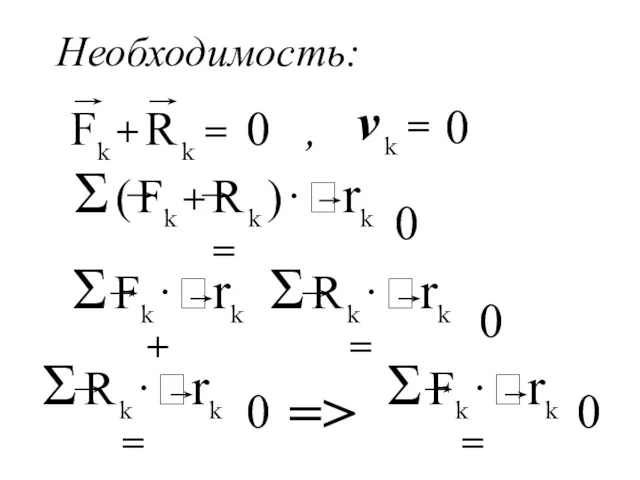
Необходимость:
0 ,
v k =
0
0
0
0
=>
0
Необходимость:
0 ,
v k =
0
0
0
0
=>
0
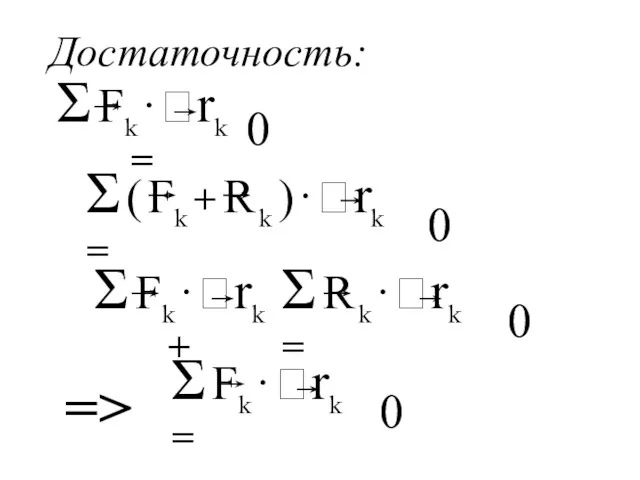
Достаточность:
0
0
0
0
=>
Достаточность:
0
0
0
0
=>
Определить величину силы F, необходимую для равновесия.
Решить, используя принцип виртуальных перемещений.
Задача.
Определить величину силы F, необходимую для равновесия.
Решить, используя принцип виртуальных перемещений.
Задача.
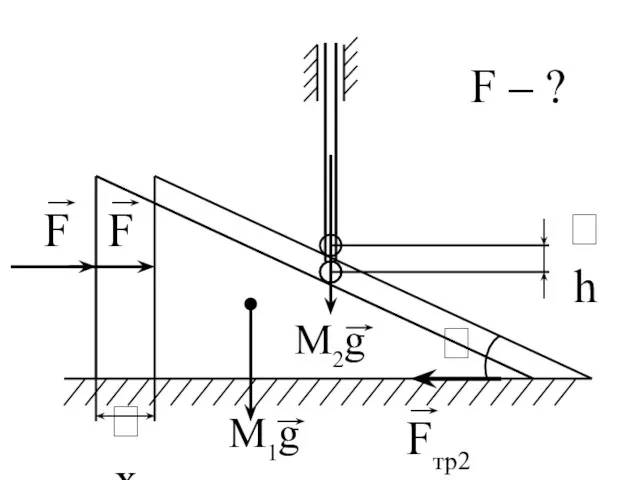
h
x
F – ?
h
x
F – ?
0
– F x –
Fтр x +
M2 g h =
0
h =
x tg
0
– F x –
Fтр x +
M2 g h =
0
h =
x tg
F =
M2 g tg
– f (M2 + M2) g
F x
F =
M2 g tg
– f (M2 + M2) g
F x
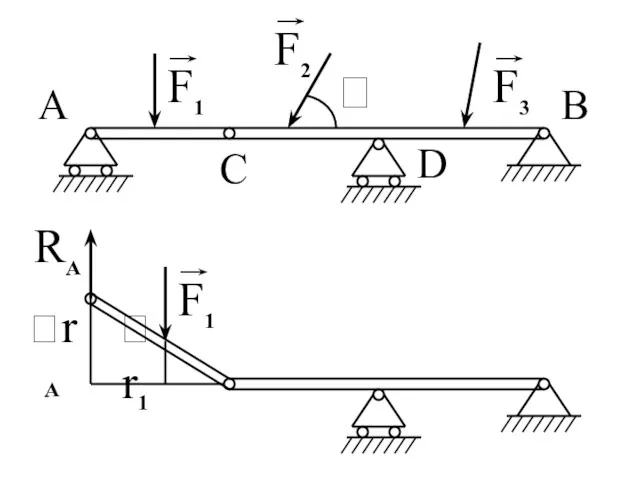
Использование принципа виртуальных перемещений для определения реакций связей
Использование принципа виртуальных перемещений для определения реакций связей
Общее уравнение динамики
Общее уравнение динамики
Пусть система, состоящая из n-точек и подчиненная удерживающим голономным идеальным связям,
Пусть система, состоящая из n-точек и подчиненная удерживающим голономным идеальным связям,
0
0
Даем системе виртуальное перемещение.
Каждая точка переместится на rk
- по определению идеальных
0
0
Даем системе виртуальное перемещение.
Каждая точка переместится на rk
- по определению идеальных
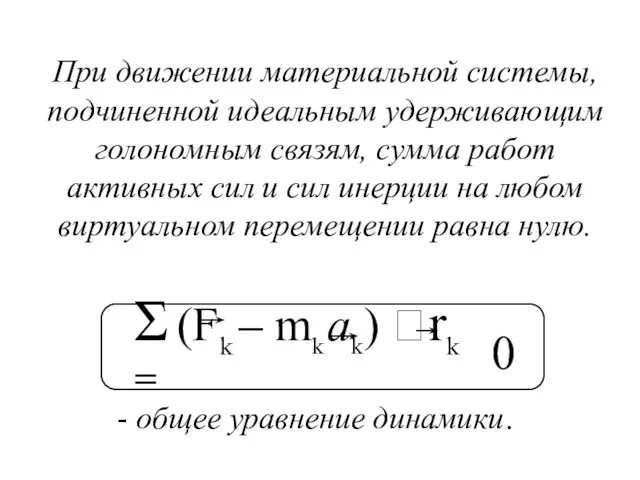
0
- общее уравнение динамики.
При движении материальной системы, подчиненной идеальным удерживающим голономным
0
- общее уравнение динамики.
При движении материальной системы, подчиненной идеальным удерживающим голономным
Пример:
P, Q, Q, –
дано
a3 –
найти
Пример:
P, Q, Q, –
дано
a3 –
найти
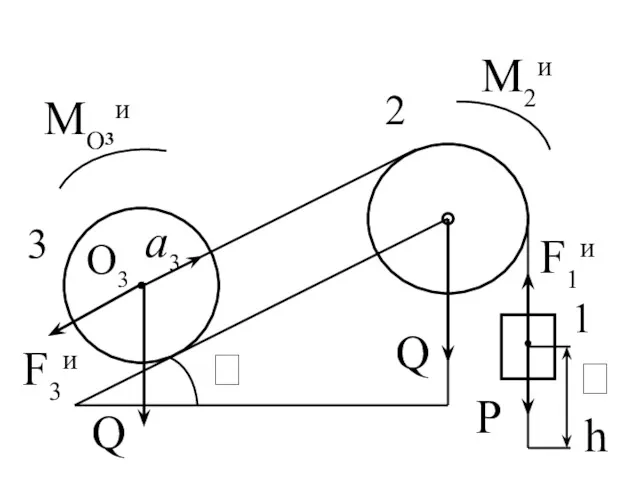
O3
O3
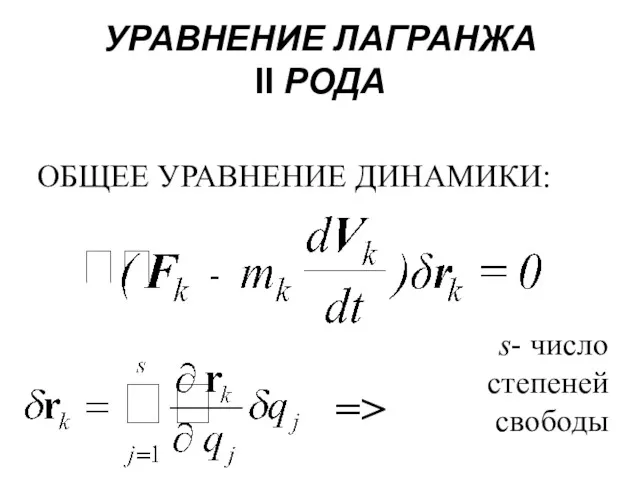
УРАВНЕНИЕ ЛАГРАНЖА
II РОДА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ:
=>
-
s- число степеней свободы
УРАВНЕНИЕ ЛАГРАНЖА
II РОДА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ:
=>
-
s- число степеней свободы
-
-
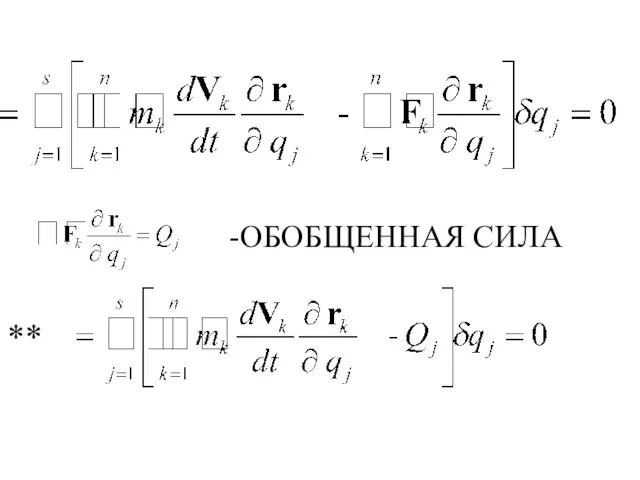
-ОБОБЩЕННАЯ СИЛА
**
-ОБОБЩЕННАЯ СИЛА
**
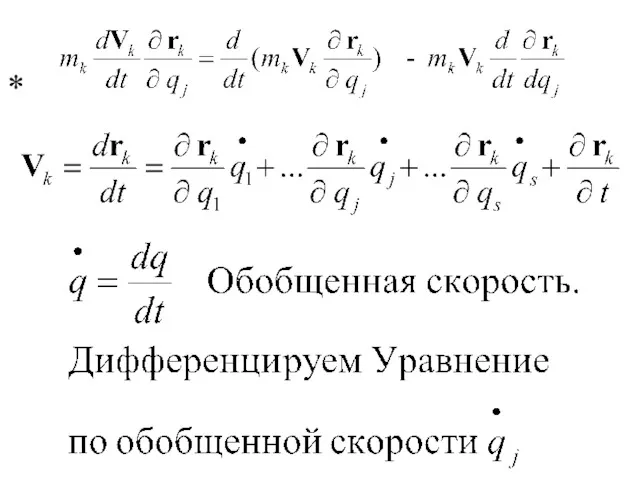
*
*
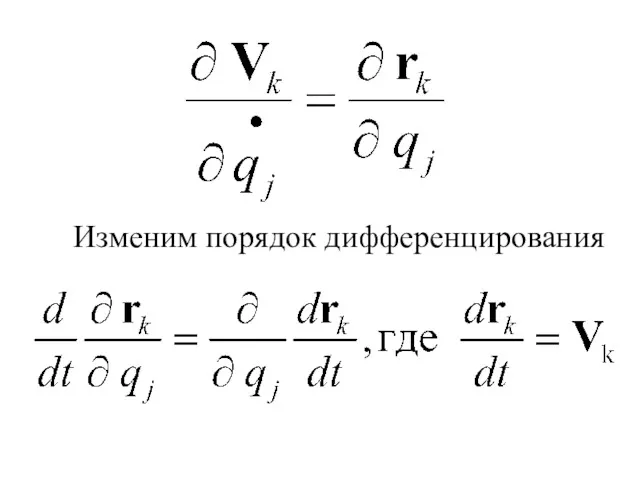
Изменим порядок дифференцирования
Изменим порядок дифференцирования
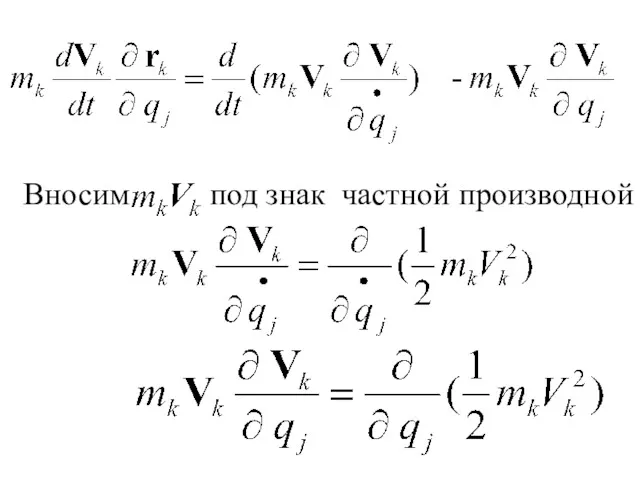
Вносим под знак частной производной
Вносим под знак частной производной
Изобразить на чертеже все активные силы, действующие на систему. Реакции идеальных
Изобразить на чертеже все активные силы, действующие на систему. Реакции идеальных
Вычислить кинетическую энергию системы, выразив ее через обобщенные координаты и скорости
Найти
Вычислить кинетическую энергию системы, выразив ее через обобщенные координаты и скорости
Найти
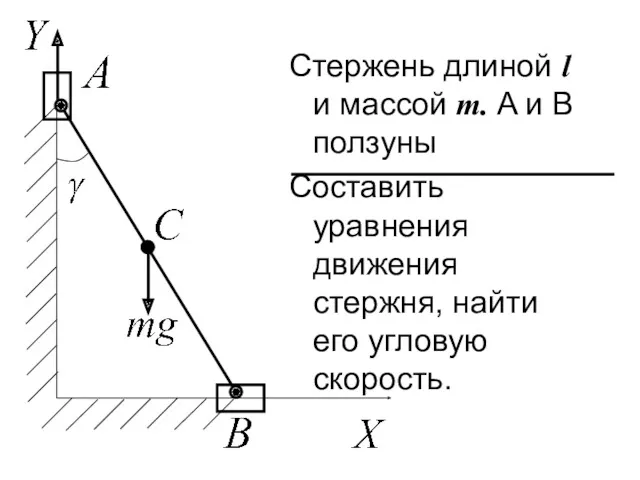
Стержень длиной l и массой m. A и B ползуны
Составить уравнения
Стержень длиной l и массой m. A и B ползуны
Составить уравнения
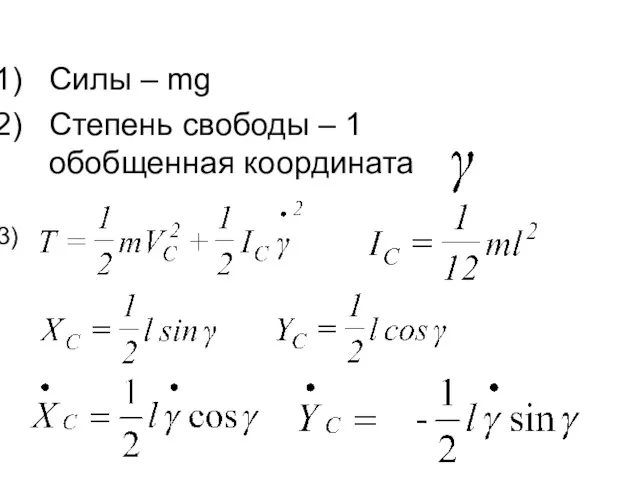
Силы – mg
Степень свободы – 1 обобщенная координата
Силы – mg
Степень свободы – 1 обобщенная координата
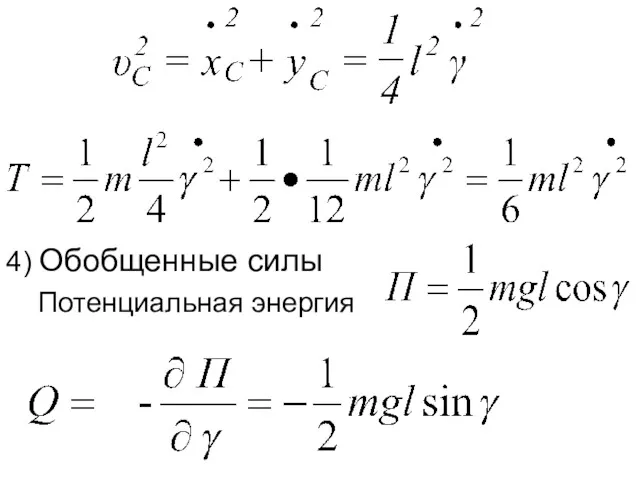
4) Обобщенные силы
Потенциальная энергия
4) Обобщенные силы
Потенциальная энергия
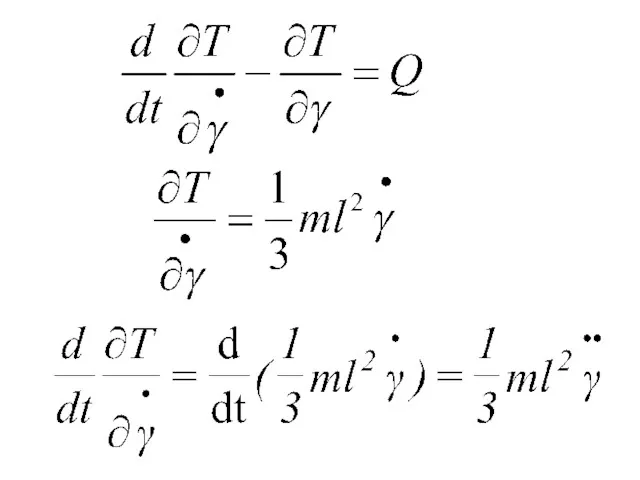
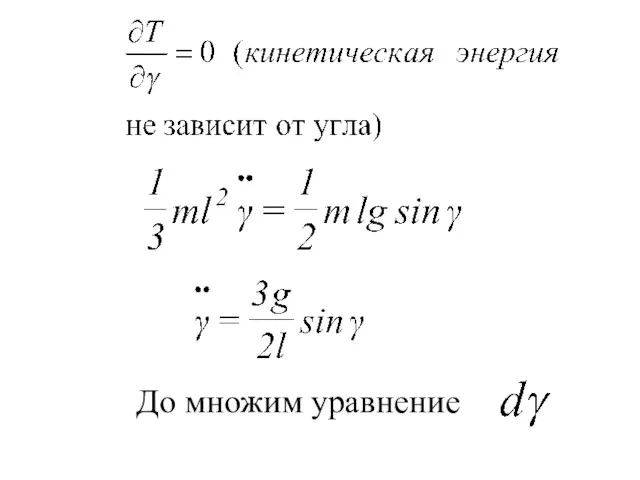
До множим уравнение
До множим уравнение
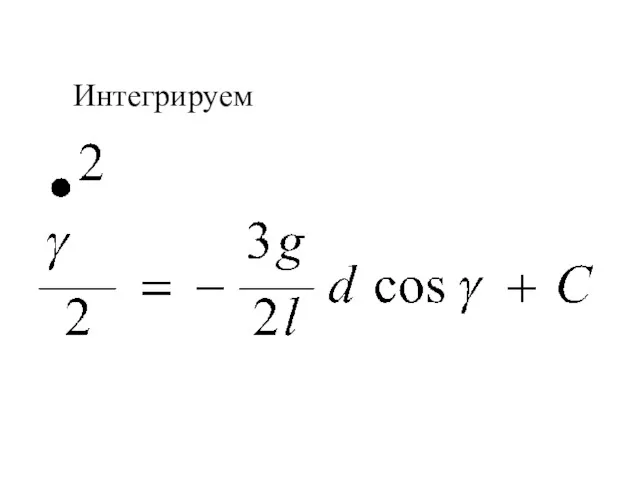
Интегрируем
Интегрируем
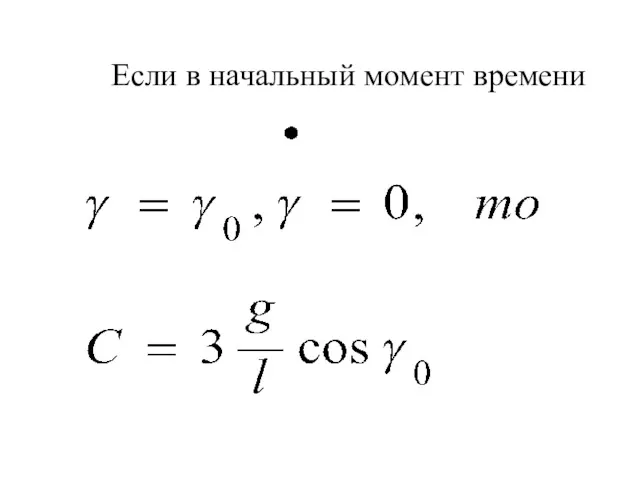
Если в начальный момент времени
Если в начальный момент времени
 Електромагнітні хвилі
Електромагнітні хвилі Основные понятия и законы динамики
Основные понятия и законы динамики Mechanical System
Mechanical System Архимедова сила. Подготовка к ГИА
Архимедова сила. Подготовка к ГИА Introduction & overview
Introduction & overview Формирование регулятивных универсальных учебных действий на уроках физики при проведении лабораторной работы
Формирование регулятивных универсальных учебных действий на уроках физики при проведении лабораторной работы Конструкції кип’ятильників і водонагрівальних пристроїв
Конструкції кип’ятильників і водонагрівальних пристроїв Использование полного внутреннего отражения
Использование полного внутреннего отражения Механика, оның бөлімдері және қозғалысты оқып үйренуде қолданылатын абстракциялық ұғымдар
Механика, оның бөлімдері және қозғалысты оқып үйренуде қолданылатын абстракциялық ұғымдар Вынужденные колебания
Вынужденные колебания Физические основы гемодинамики
Физические основы гемодинамики Изобретение электричества. История, применение, получение
Изобретение электричества. История, применение, получение 1949 – 1989 - 1991
1949 – 1989 - 1991 Энергия связи. Дефект масс
Энергия связи. Дефект масс Открытие нейтрона
Открытие нейтрона Электроспиннинг
Электроспиннинг Состояние электронов в атоме
Состояние электронов в атоме Механические свойства материалов. Диаграммы растяжения и сжатия. (Лекция 4)
Механические свойства материалов. Диаграммы растяжения и сжатия. (Лекция 4) Проявление сил тяжести и упругости живой природе
Проявление сил тяжести и упругости живой природе Від рівноважного випромінювання до лазера
Від рівноважного випромінювання до лазера Распиливание и припасовка
Распиливание и припасовка Исследовательский проект Машина Голдберга Разбивалка яйиц
Исследовательский проект Машина Голдберга Разбивалка яйиц презентация Обнаружение магнитного поля по его действию на электрический ток
презентация Обнаружение магнитного поля по его действию на электрический ток Определение перемещений в плоских стержневых конструкциях
Определение перемещений в плоских стержневых конструкциях Механика. Механическое движение
Механика. Механическое движение Кинематика точки
Кинематика точки Влияние наушников на слух человека
Влияние наушников на слух человека Обобщающий урок по теме Движение и взаимодействие тел
Обобщающий урок по теме Движение и взаимодействие тел