- Основи теорії механізмів і машин. (Розділ 3)

Содержание
- 2. Тема 1. Вступна лекція План: 1. Вступ. Основні поняття та визначення. 2. Класифікація кінематичних пар. 3.
- 3. Література: Артоболевский Н.Н., Эдельштейн Б.В. Сборник задач по теории механизмов и машин. – М.: Наука, 1975.-
- 4. 1. Вступ. Основні поняття статики Теорія механізмів і машин являє собою один із важливих розділів курсу
- 5. Машина – комплекс механізмів, які відтворюють заданий рух для зміни форми тіла, його положення і т.ін.
- 6. В залежності від характеру руху ланки мають свою назву: кривошип; коромисло; шатун; повзун; куліса; кулачок; зубчасте
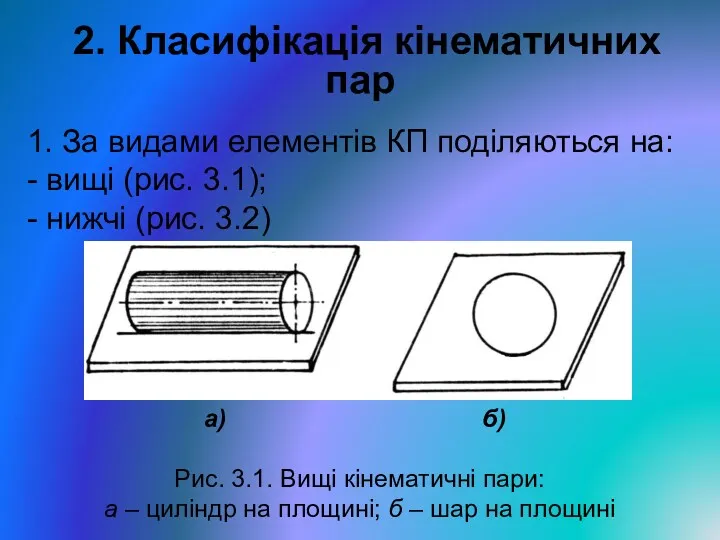
- 7. 2. Класифікація кінематичних пар 1. За видами елементів КП поділяються на: - вищі (рис. 3.1); -
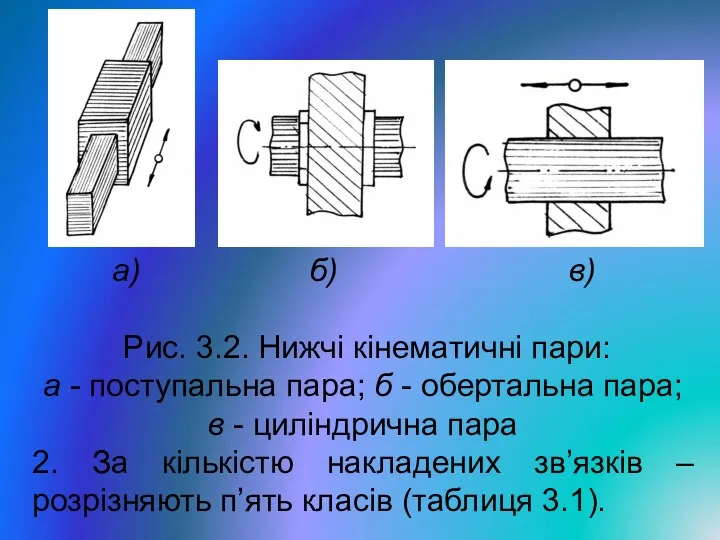
- 8. а) б) в) Рис. 3.2. Нижчі кінематичні пари: а - поступальна пара; б - обертальна пара;
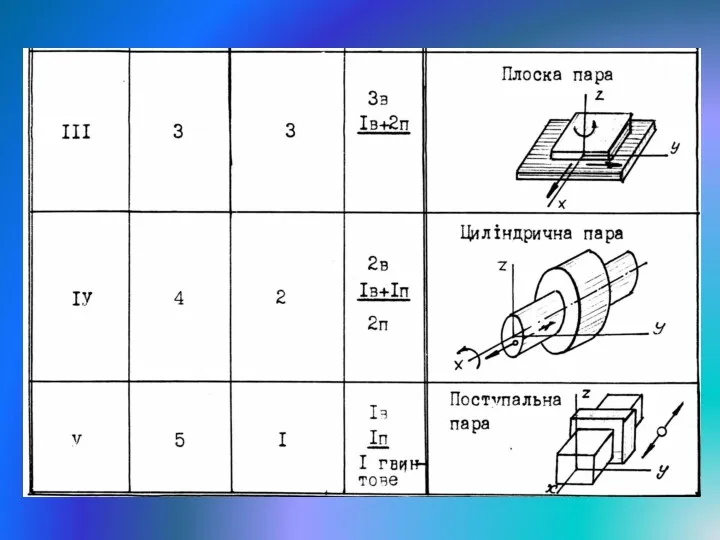
- 9. Таблиця 3.1. Класифікація кінематичних пар за кількістю ступенів вільності
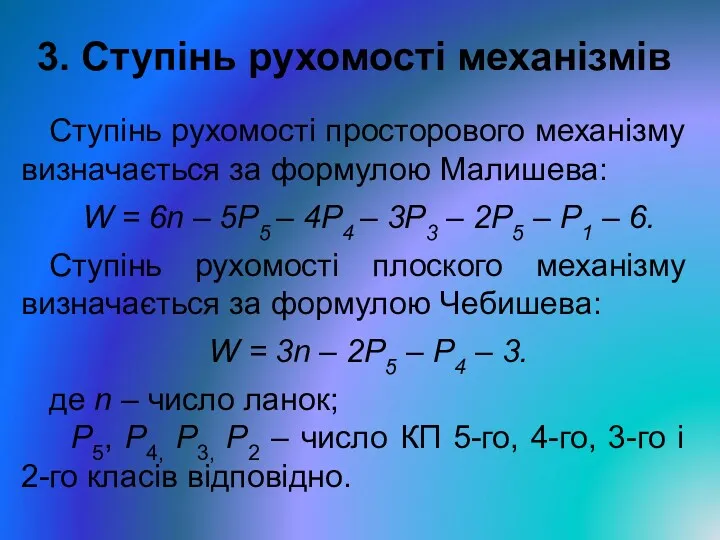
- 11. 3. Ступінь рухомості механізмів Ступінь рухомості просторового механізму визначається за формулою Малишева: W = 6n –
- 12. Приклади. Визначити ступінь рухомості механізмів, наведених на рис. 3.3, а, б. Рішення прикладів наведено безпосередньо на
- 13. Контрольні питання 1. Що вивчає наука “Теорія механізмів і машин”? 2. Дайте визначення понять “механізм“, “машина“;
- 14. Тема 2. Структурний аналіз стержневих механізмів План: Розкладання механізму на структурні групи Ассура. Заміна вищих кінематичних
- 15. 1. Розкладання механізму на структурні групи Ассура Згідно теорії Ассура і Артоболевского механізм розглядається як складна
- 16. Групи Ассура поділяються на класи в залежності від їх структури. На рис. 3.4, а, б, в,
- 17. На рис. 3.4, е – структурна група 3-го класу, 3-го порядку. На рис. 3.4, ж –
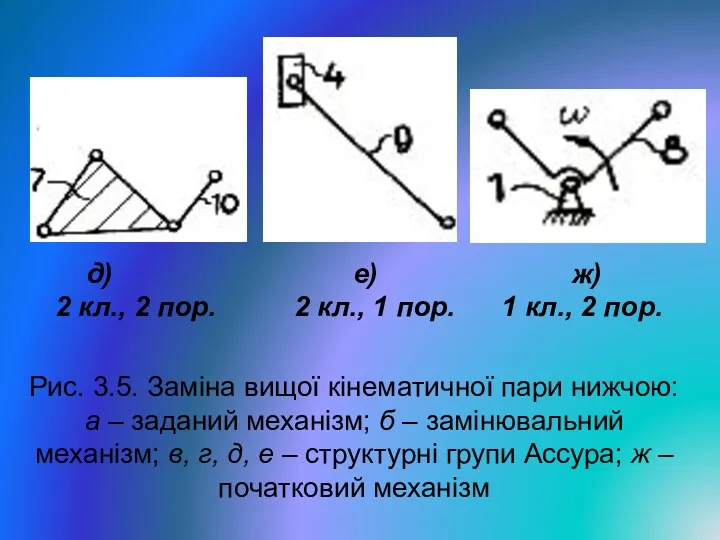
- 18. 2. Заміна вищих кінематичних пар нижчими Приклад заміни вищої кінематичної пари нижчої показаний на рис. 3.5.
- 19. в) г) 2 кл., 2 пор. (діада) 2 кл., 2 пор.
- 20. д) е) ж) 2 кл., 2 пор. 2 кл., 1 пор. 1 кл., 2 пор. Рис.
- 21. Контрольні питання 1. У чому полягає структурний аналіз механізмів? 2. Дайте визначення початкового механізму, структурної групи
- 22. Тема 3. Кінематичний аналіз механізмів План: Мета та методи кінематичного аналізу механізмів. Побудова плану швидкостей. Побудова
- 23. 1. Мета та методи кінематичного аналізу механізмів Рух реальних механізмів і машин відбувається під дією різних
- 24. Найбільш розповсюдженими є два перших (за переліком) методи. Графічний метод полягає у побудові планів швидкостей і
- 25. Рис. 3.6. Приклади побудови графіків s = s(t), υ = υ(t) і а = а(t) методом
- 27. Скачать презентацию
Тема 1. Вступна лекція
План:
1. Вступ. Основні поняття та визначення.
2. Класифікація кінематичних
Тема 1. Вступна лекція
План:
1. Вступ. Основні поняття та визначення.
2. Класифікація кінематичних
Література:
Артоболевский Н.Н., Эдельштейн Б.В. Сборник задач по теории механизмов и
Література:
Артоболевский Н.Н., Эдельштейн Б.В. Сборник задач по теории механизмов и
1. Вступ. Основні поняття статики
Теорія механізмів і машин являє собою один
1. Вступ. Основні поняття статики
Теорія механізмів і машин являє собою один
Машина – комплекс механізмів, які відтворюють заданий рух для зміни форми
Машина – комплекс механізмів, які відтворюють заданий рух для зміни форми
В залежності від характеру руху ланки мають свою назву: кривошип; коромисло;
В залежності від характеру руху ланки мають свою назву: кривошип; коромисло;
2. Класифікація кінематичних пар
1. За видами елементів КП поділяються на:
- вищі
2. Класифікація кінематичних пар
1. За видами елементів КП поділяються на:
- вищі
а) б) в)
Рис. 3.2. Нижчі кінематичні пари:
а - поступальна
а) б) в)
Рис. 3.2. Нижчі кінематичні пари:
а - поступальна
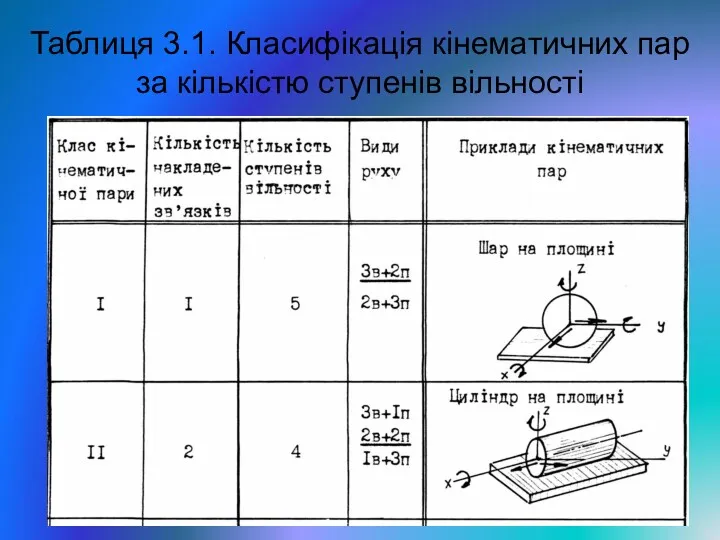
Таблиця 3.1. Класифікація кінематичних пар за кількістю ступенів вільності
Таблиця 3.1. Класифікація кінематичних пар за кількістю ступенів вільності
3. Ступінь рухомості механізмів
Ступінь рухомості просторового механізму визначається за формулою Малишева:
W
3. Ступінь рухомості механізмів
Ступінь рухомості просторового механізму визначається за формулою Малишева:
W
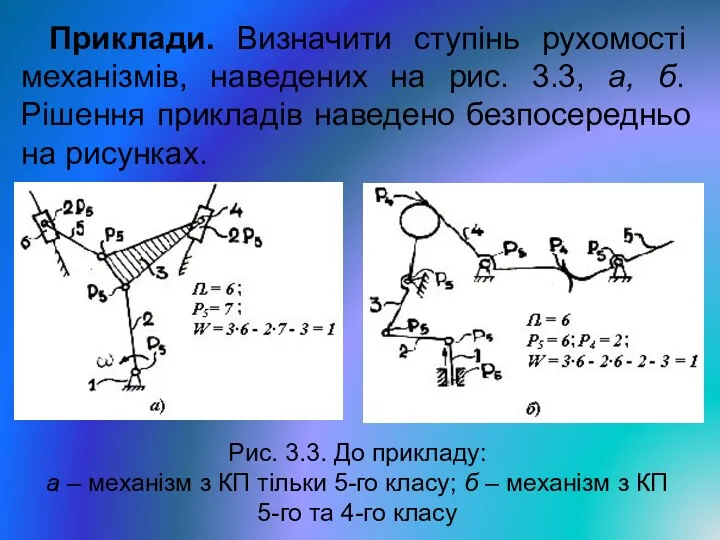
Приклади. Визначити ступінь рухомості механізмів, наведених на рис. 3.3, а, б.
Приклади. Визначити ступінь рухомості механізмів, наведених на рис. 3.3, а, б.
Контрольні питання
1. Що вивчає наука “Теорія механізмів і машин”?
2. Дайте визначення
Контрольні питання
1. Що вивчає наука “Теорія механізмів і машин”?
2. Дайте визначення
Тема 2. Структурний аналіз стержневих механізмів
План:
Розкладання механізму на структурні групи Ассура.
Заміна
Тема 2. Структурний аналіз стержневих механізмів
План:
Розкладання механізму на структурні групи Ассура.
Заміна
1. Розкладання механізму на структурні групи Ассура
Згідно теорії Ассура і Артоболевского
1. Розкладання механізму на структурні групи Ассура
Згідно теорії Ассура і Артоболевского

Групи Ассура поділяються на класи в залежності від їх структури.
На
Групи Ассура поділяються на класи в залежності від їх структури.
На
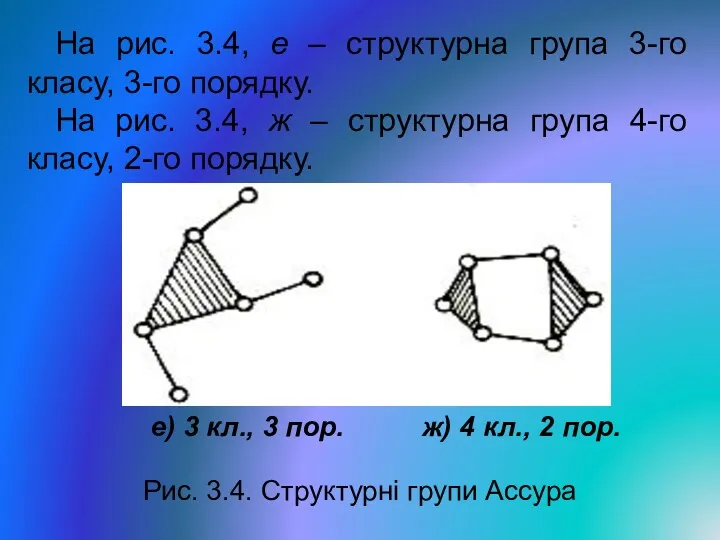
На рис. 3.4, е – структурна група 3-го класу, 3-го порядку.
На
На рис. 3.4, е – структурна група 3-го класу, 3-го порядку.
На

2. Заміна вищих кінематичних пар нижчими
Приклад заміни вищої кінематичної пари нижчої
2. Заміна вищих кінематичних пар нижчими
Приклад заміни вищої кінематичної пари нижчої
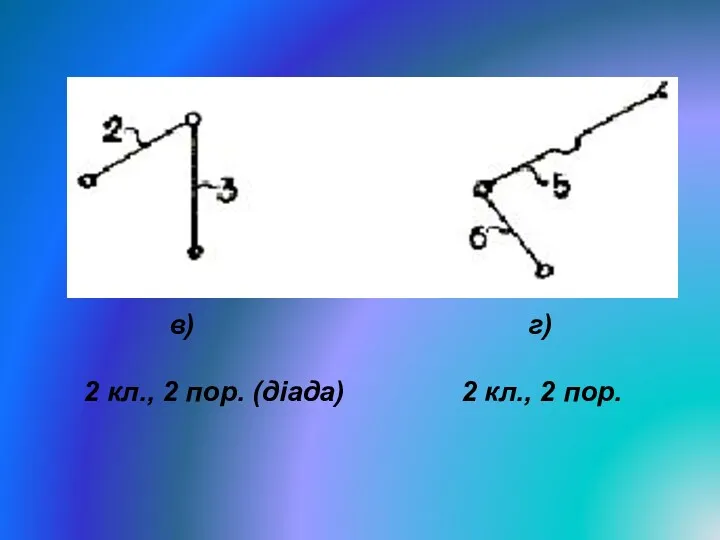
в) г)
2 кл., 2 пор. (діада) 2 кл., 2 пор.
в) г)
2 кл., 2 пор. (діада) 2 кл., 2 пор.
д) е) ж)
2 кл., 2 пор. 2 кл., 1 пор.
д) е) ж)
2 кл., 2 пор. 2 кл., 1 пор.
Контрольні питання
1. У чому полягає структурний аналіз механізмів?
2. Дайте визначення початкового
Контрольні питання
1. У чому полягає структурний аналіз механізмів?
2. Дайте визначення початкового
Тема 3. Кінематичний аналіз механізмів
План:
Мета та методи кінематичного аналізу механізмів.
Побудова плану
Тема 3. Кінематичний аналіз механізмів
План:
Мета та методи кінематичного аналізу механізмів.
Побудова плану
1. Мета та методи кінематичного аналізу механізмів
Рух реальних механізмів і машин
1. Мета та методи кінематичного аналізу механізмів
Рух реальних механізмів і машин
Найбільш розповсюдженими є два перших (за переліком) методи.
Графічний метод полягає у
Найбільш розповсюдженими є два перших (за переліком) методи.
Графічний метод полягає у
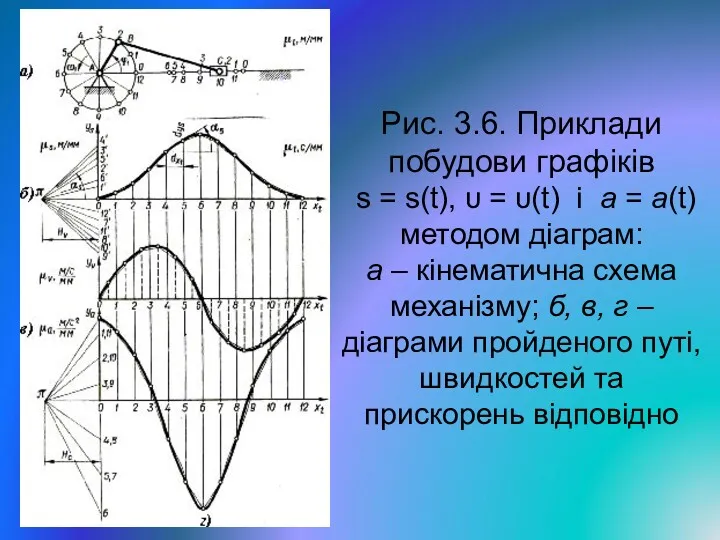
Рис. 3.6. Приклади побудови графіків
s = s(t), υ = υ(t)
Рис. 3.6. Приклади побудови графіків
s = s(t), υ = υ(t)
 Дизель 10 Д 100
Дизель 10 Д 100 Тепловые двигатели и охрана окружающей среды
Тепловые двигатели и охрана окружающей среды Экзотические и перспективные виды электростанций
Экзотические и перспективные виды электростанций презентация по физике 7 класс
презентация по физике 7 класс Основы теории четырехполюсников
Основы теории четырехполюсников Потери в электрических сетях
Потери в электрических сетях Принцип работы тепловых машин
Принцип работы тепловых машин Измерение силы Архимеда
Измерение силы Архимеда Перемещение тела при прямолинейном равноускоренном движении без начальной скорости
Перемещение тела при прямолинейном равноускоренном движении без начальной скорости Ремонт автомобилей. Дефектация и сортировка деталей. (Тема 2.3)
Ремонт автомобилей. Дефектация и сортировка деталей. (Тема 2.3) Механическая работа. Единицы работы. Мощность. Единицы мощности
Механическая работа. Единицы работы. Мощность. Единицы мощности Сила Архимеда
Сила Архимеда Решение нестандартных задач по физике
Решение нестандартных задач по физике Жарықтандыру және дабылдау
Жарықтандыру және дабылдау Воздухоплавание
Воздухоплавание Ядерний реактор
Ядерний реактор Методическая разработка урока Электроскоп. Электрометр. Проводники и диэлектрики
Методическая разработка урока Электроскоп. Электрометр. Проводники и диэлектрики Жоғары жиілікті сыйымдылықты разрядтың
Жоғары жиілікті сыйымдылықты разрядтың Подготовка к контрольной работе по теме Изменение агрегатных состояний вещества
Подготовка к контрольной работе по теме Изменение агрегатных состояний вещества Явление отражения звука
Явление отражения звука ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2)
ЖРД. Устройство и принцип действия, внутрикамерные процессы. (Лекция 2) Модель строения атома
Модель строения атома Презентация Через тернии к звёздам
Презентация Через тернии к звёздам Детали Машин. Виды механизмов
Детали Машин. Виды механизмов Дидактический пакет по проектированию образовательного процесса по физике в 10 кл., тема : Молекулярная физика. Термодинамика
Дидактический пакет по проектированию образовательного процесса по физике в 10 кл., тема : Молекулярная физика. Термодинамика Görsel algi ve görsel esteti̇k öğeler (6)
Görsel algi ve görsel esteti̇k öğeler (6) Механика. Глава 2. Динамика
Механика. Глава 2. Динамика Работа и энергия
Работа и энергия