- Основні види механізмів

Содержание
- 2. Плоским називають механізм, рухомі точки якого рухаються в паралельних площинах. Механізм є просторовим, якщо рухомі точки
- 3. Найчастіше цей механізм використовують у: - поршневих машинах (двигуни внутрішнього згоряння, компресори, насоси), - ковальських машинах:
- 4. Він використовується для перетворення одного виду обертального руху в інший і може бути залежно від розмірів
- 5. застосовують у випадку, коли одна з його точок мусить рухатись по заданій траєкторії. На рис. 2.3.
- 6. Чотириланковий пантограф Суттєвою вимогою синтезу схеми маніпулятора є виконання умови, щоб точка С закріплення пристрою захвату
- 7. Здійснює перетворення одного виду обертального руху (ланка 1) в інший (ланка 3), або безперервного обертального руху
- 8. У гідроприводах широко використовується різновид кулісного механізму, в якому кулісу з каменем замінює циліндр 3 з
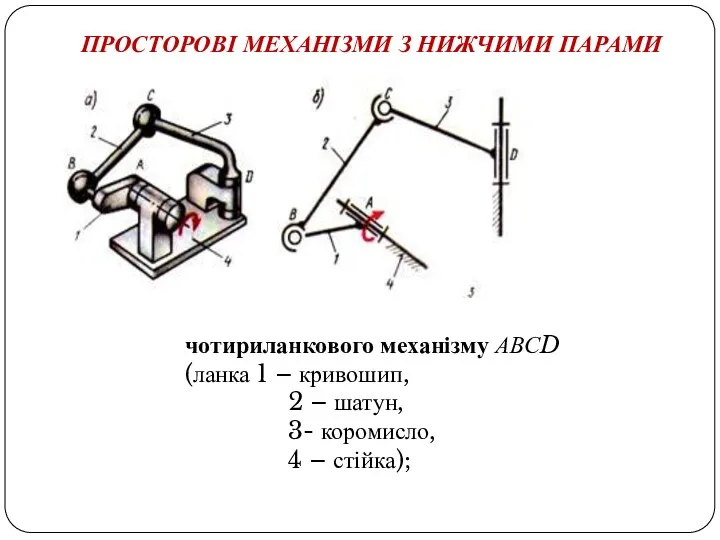
- 9. ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ чотириланкового механізму АВСD (ланка 1 – кривошип, 2 – шатун, 3-
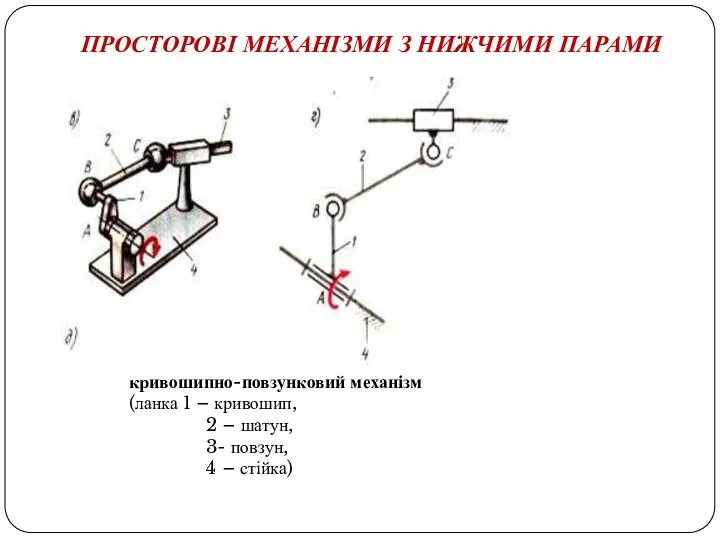
- 10. ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ кривошипно-повзунковий механізм (ланка 1 – кривошип, 2 – шатун, 3- повзун,
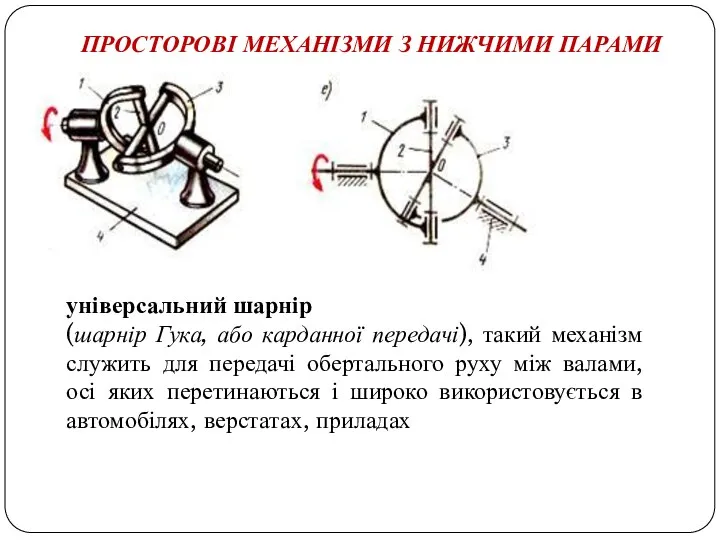
- 11. ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ універсальний шарнір (шарнір Гука, або карданної передачі), такий механізм служить для
- 12. Структурна схема важільного механізму промислового робота з незамкненим кінематичним ланцюгом ABCDEF (ланки 1-5 – рухомі, 6
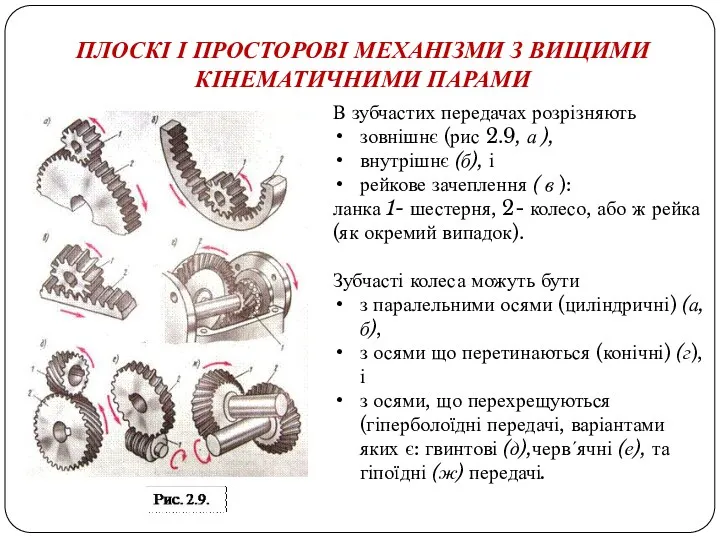
- 13. ПЛОСКІ І ПРОСТОРОВІ МЕХАНІЗМИ З ВИЩИМИ КІНЕМАТИЧНИМИ ПАРАМИ В зубчастих передачах розрізняють зовнішнє (рис 2.9, а
- 14. Широко використовуються в верстатах приладах. Вища пара утворена ланками (кулачок - 1 і штовхач - 2),
- 15. Перетворює безперервне обертання вхідної ланки - кривошипа 1 в переривчасте (із зупинками) обертання вихідної ланки-хреста 2.
- 16. Храповий механізм з ведучою собачкою і стояком 4 (рис. 2.16) служить для перетворення зворотно-обертального руху коромисла
- 17. У фрикційному механізмі передача обертального руху здійснюється за допомогою тертя, між ланками 1,2 , що утворюють
- 19. Скачать презентацию
Плоским називають механізм, рухомі точки якого рухаються в паралельних площинах.
Механізм
Плоским називають механізм, рухомі точки якого рухаються в паралельних площинах.
Механізм
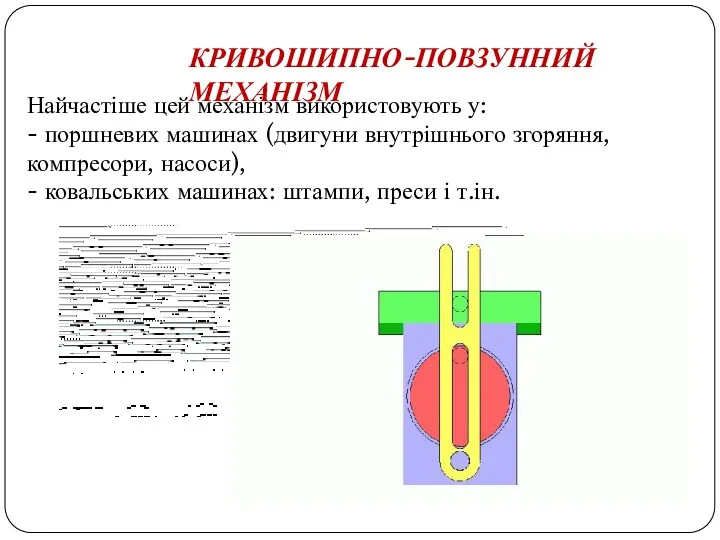
Найчастіше цей механізм використовують у:
- поршневих машинах (двигуни внутрішнього згоряння, компресори,
Найчастіше цей механізм використовують у:
- поршневих машинах (двигуни внутрішнього згоряння, компресори,
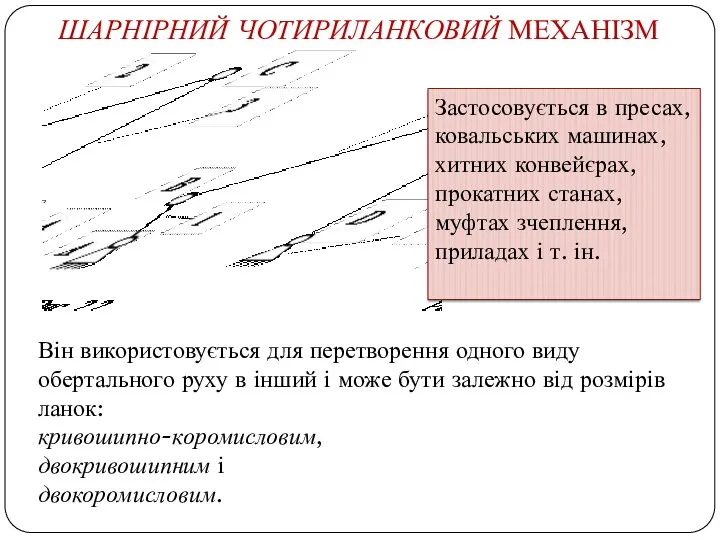
Він використовується для перетворення одного виду обертального руху в інший і
Він використовується для перетворення одного виду обертального руху в інший і
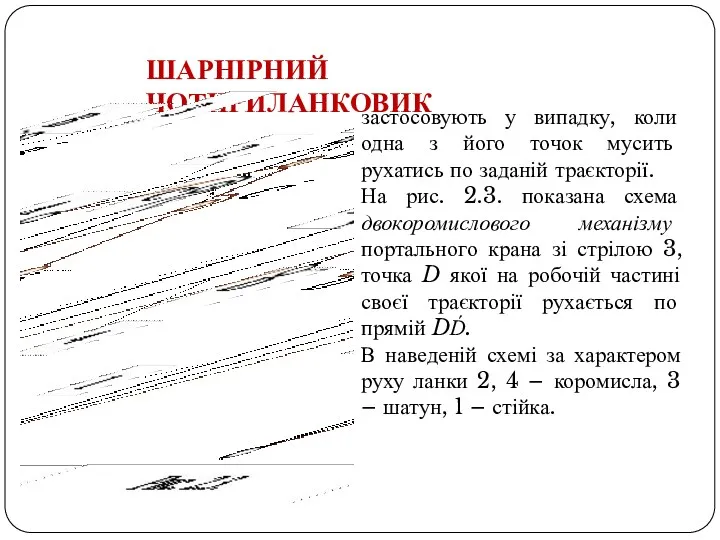
застосовують у випадку, коли одна з його точок мусить рухатись по
застосовують у випадку, коли одна з його точок мусить рухатись по
Чотириланковий пантограф
Суттєвою вимогою синтезу схеми маніпулятора є виконання умови, щоб точка
Чотириланковий пантограф
Суттєвою вимогою синтезу схеми маніпулятора є виконання умови, щоб точка
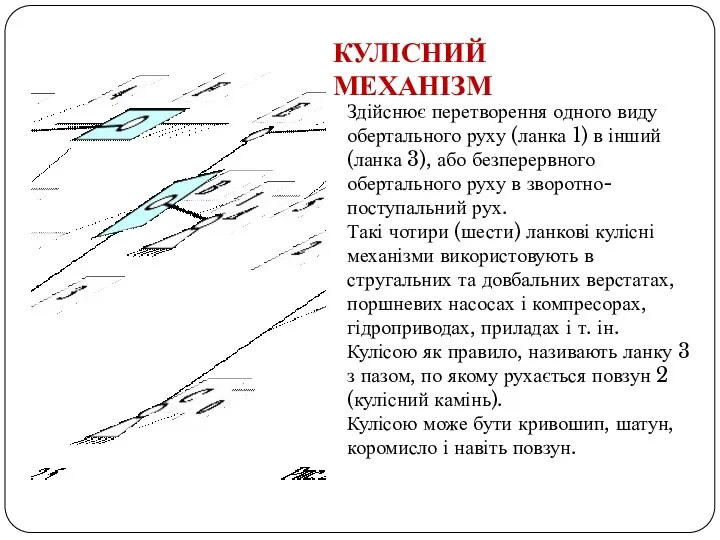
Здійснює перетворення одного виду обертального руху (ланка 1) в інший (ланка
Здійснює перетворення одного виду обертального руху (ланка 1) в інший (ланка
У гідроприводах широко використовується різновид кулісного механізму, в якому кулісу з
У гідроприводах широко використовується різновид кулісного механізму, в якому кулісу з
ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ
чотириланкового механізму АВСD
(ланка 1 – кривошип,
2
ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ
чотириланкового механізму АВСD
(ланка 1 – кривошип,
2
ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ
кривошипно-повзунковий механізм (ланка 1 – кривошип,
ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ
кривошипно-повзунковий механізм (ланка 1 – кривошип,
ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ
універсальний шарнір
(шарнір Гука, або карданної передачі),
ПРОСТОРОВІ МЕХАНІЗМИ З НИЖЧИМИ ПАРАМИ
універсальний шарнір
(шарнір Гука, або карданної передачі),
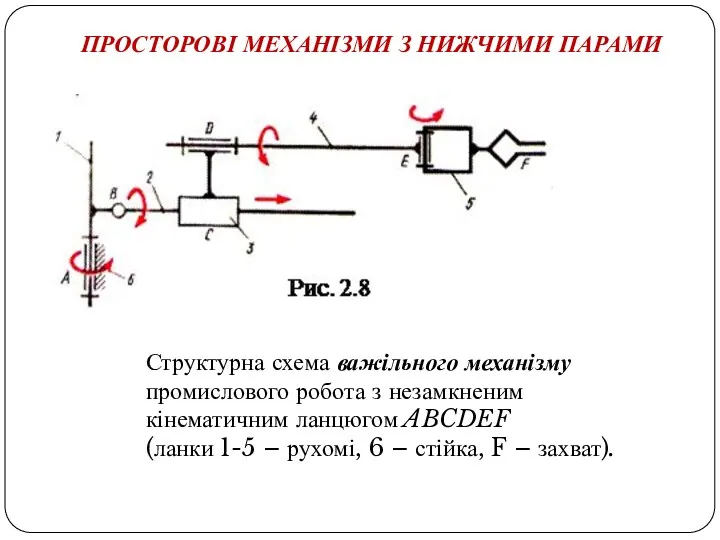
Структурна схема важільного механізму промислового робота з незамкненим кінематичним ланцюгом ABCDEF
Структурна схема важільного механізму промислового робота з незамкненим кінематичним ланцюгом ABCDEF
ПЛОСКІ І ПРОСТОРОВІ МЕХАНІЗМИ З ВИЩИМИ КІНЕМАТИЧНИМИ ПАРАМИ
В зубчастих передачах розрізняють
ПЛОСКІ І ПРОСТОРОВІ МЕХАНІЗМИ З ВИЩИМИ КІНЕМАТИЧНИМИ ПАРАМИ
В зубчастих передачах розрізняють
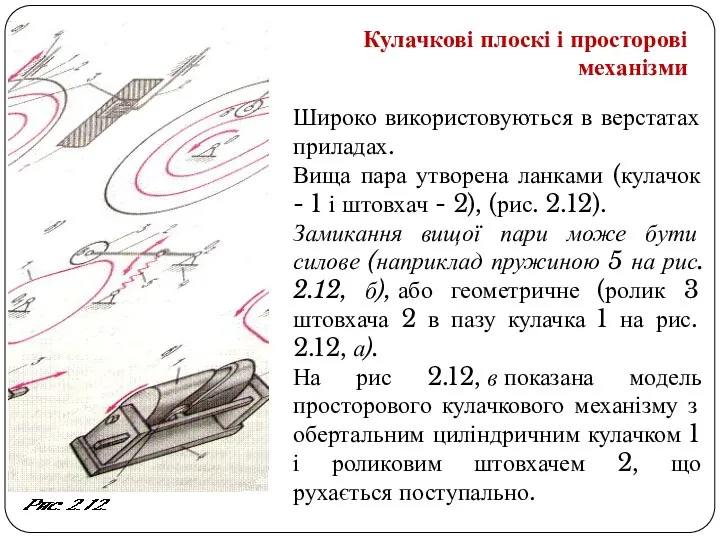
Широко використовуються в верстатах приладах.
Вища пара утворена ланками (кулачок -
Широко використовуються в верстатах приладах.
Вища пара утворена ланками (кулачок -

Перетворює безперервне обертання вхідної ланки - кривошипа 1 в переривчасте (із
Перетворює безперервне обертання вхідної ланки - кривошипа 1 в переривчасте (із
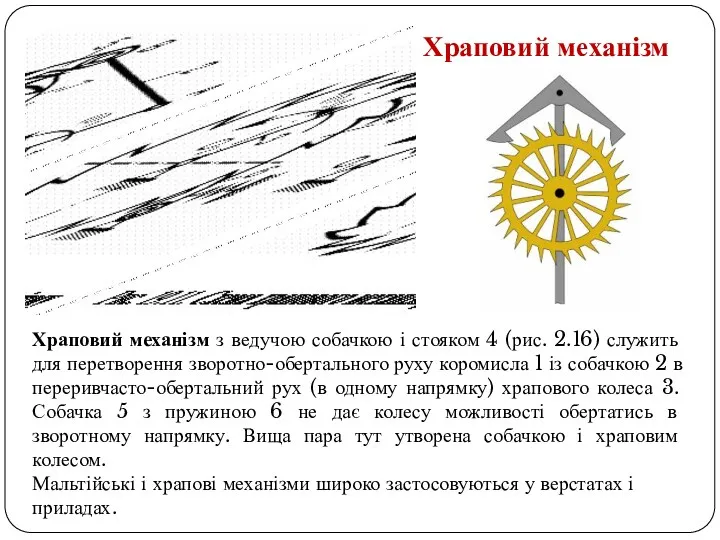
Храповий механізм з ведучою собачкою і стояком 4 (рис. 2.16) служить
Храповий механізм з ведучою собачкою і стояком 4 (рис. 2.16) служить
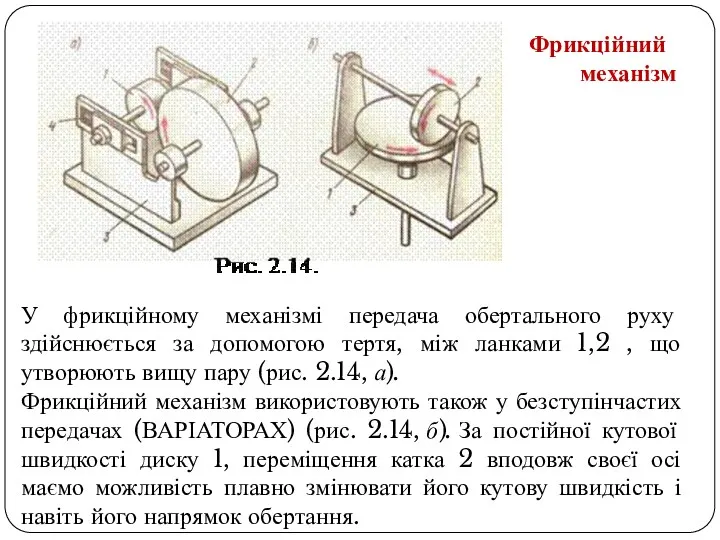
У фрикційному механізмі передача обертального руху здійснюється за допомогою тертя, між
У фрикційному механізмі передача обертального руху здійснюється за допомогою тертя, між
 Молекулярно-кинетическая теория
Молекулярно-кинетическая теория Ультразвук. Промышленное применение
Ультразвук. Промышленное применение Электростатика
Электростатика Движение в неинерциальной системе отсчета
Движение в неинерциальной системе отсчета презентация физика в познании вещества, поля, пространства
презентация физика в познании вещества, поля, пространства Облака
Облака урок физики в 7 классе по теме Давление. Единицы давления. Способы изменения давления
урок физики в 7 классе по теме Давление. Единицы давления. Способы изменения давления Лекция №7 (7). Электромагнитные волны в различных средах
Лекция №7 (7). Электромагнитные волны в различных средах Электрический заряд
Электрический заряд Электрические цепи в режиме постоянного тока и гармонических воздействий
Электрические цепи в режиме постоянного тока и гармонических воздействий Презентация к уроку по теме Газовые законы
Презентация к уроку по теме Газовые законы Мощность. Единицы мощности. 7 класс
Мощность. Единицы мощности. 7 класс Производство и передача электроэнергии
Производство и передача электроэнергии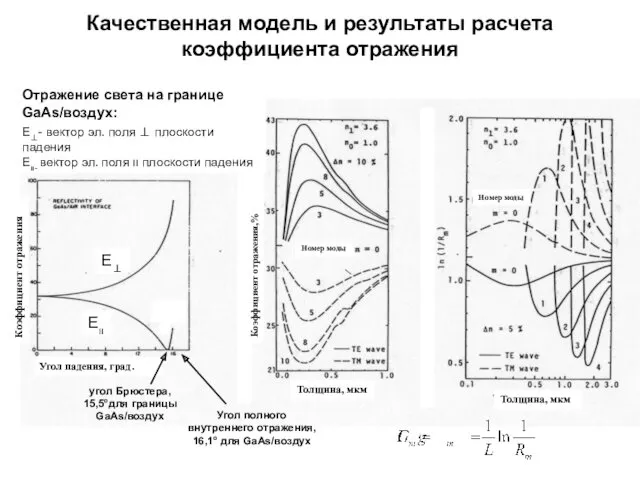 Качественная модель и результаты расчета коэффициента отражения
Качественная модель и результаты расчета коэффициента отражения Методы разделения белковых смесей. Хроматография
Методы разделения белковых смесей. Хроматография Модель строения твердых тел
Модель строения твердых тел Инструментальные методы исследования органических веществ. Спектроскопические методы – ЯМР (часть 1)
Инструментальные методы исследования органических веществ. Спектроскопические методы – ЯМР (часть 1) Курс Ядерная энергетика и атомные реакторы. Лекция 6. Замедление нейтронов. Кинематика
Курс Ядерная энергетика и атомные реакторы. Лекция 6. Замедление нейтронов. Кинематика Оптика. Законы преломления и отражения света. Полное отражение
Оптика. Законы преломления и отражения света. Полное отражение TM PE / Метод устранения неисправности DCT
TM PE / Метод устранения неисправности DCT Наблюдения и опыты
Наблюдения и опыты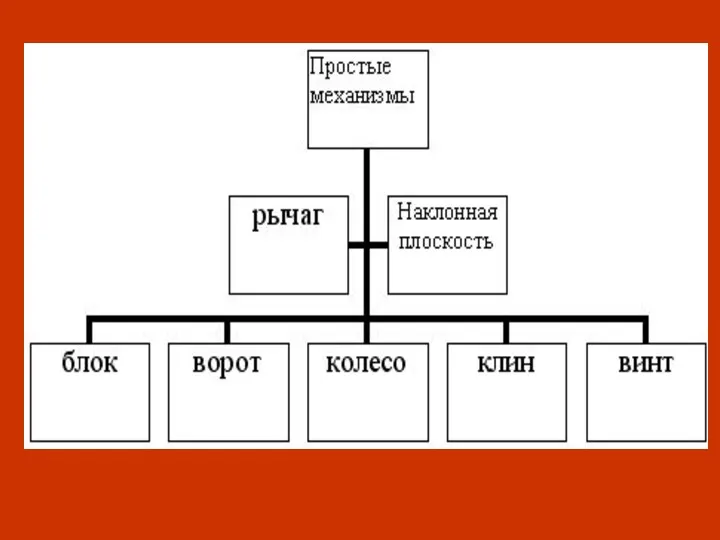 Простые механизмы
Простые механизмы ИК-спектроскопия органических соединений
ИК-спектроскопия органических соединений Максималды ток қорғанысы
Максималды ток қорғанысы Действия электрического тока
Действия электрического тока Проектная деятельность на уроках физики
Проектная деятельность на уроках физики Уявлення про природу світла
Уявлення про природу світла Управління потоками реактивної енергії
Управління потоками реактивної енергії