- Основы кинематики

Содержание
- 2. ТУРЗ 1 (1) срок сдачи: 18 22 28 (РПД) - 3 61 64 69 72 73
- 3. МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ ОСНОВЫ КИНЕМАТИКИ Урок 1/1 Введение,§1-6 ОК-1
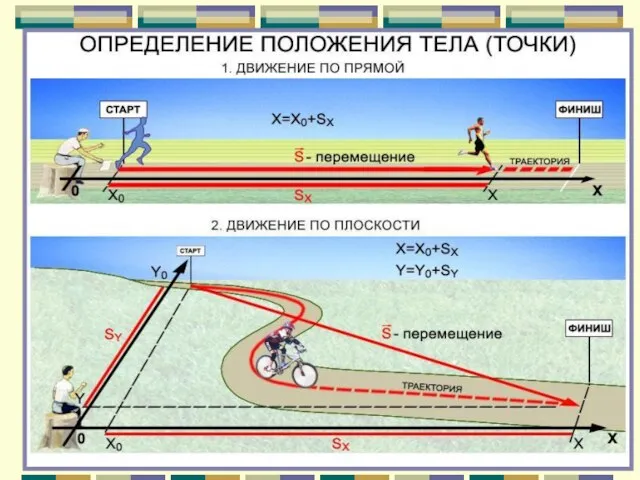
- 4. МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ- процесс изменения положения тела в пространстве относительно других тел с течением времени. различно в
- 5. ЗАКОН (УРАВНЕНИЕ) ДВИЖЕНИЯ – уравнение, выражающее зависимость величин, характеризующих движение, от времени:: х = х (t)
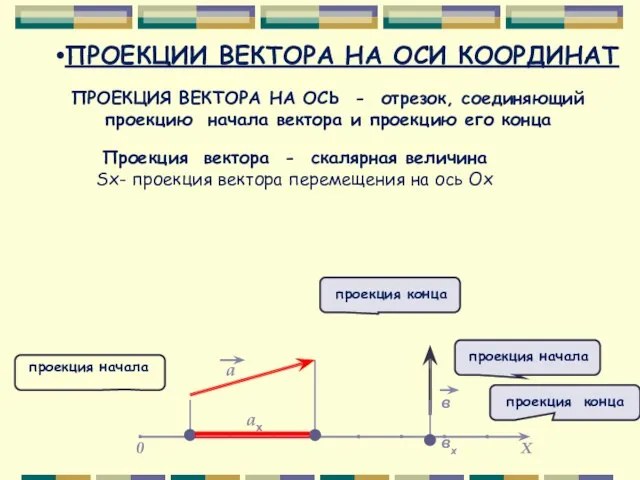
- 7. ПРОЕКЦИИ ВЕКТОРА НА ОСИ КООРДИНАТ ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ - отрезок, соединяющий проекцию начала вектора и
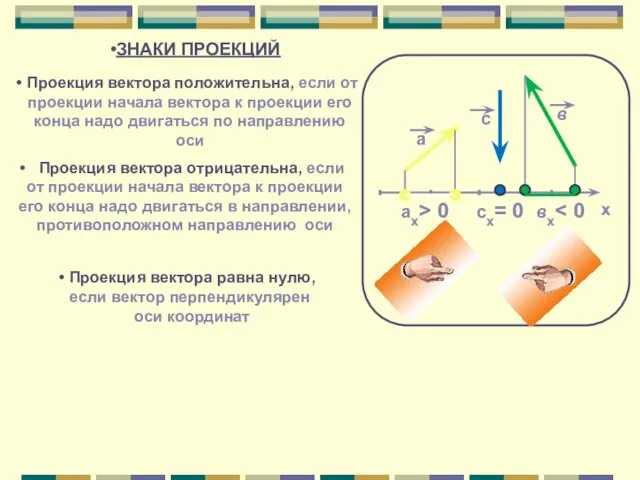
- 8. ЗНАКИ ПРОЕКЦИЙ а в с х aх> 0 вх сх= 0 Проекция вектора положительна, если от
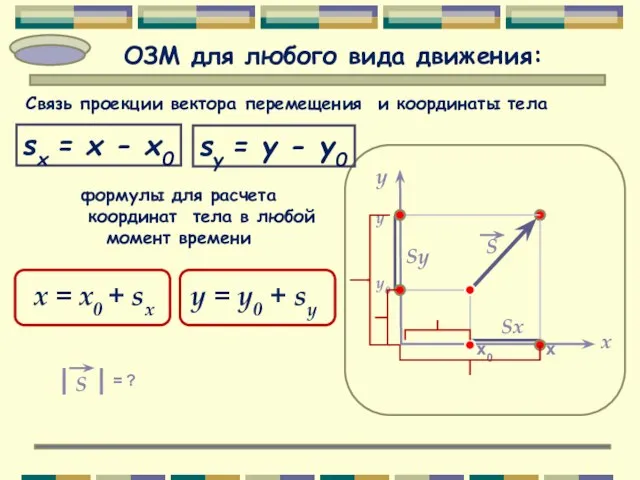
- 9. ОЗМ для любого вида движения: Связь проекции вектора перемещения и координаты тела х0 х х у
- 10. НАЙТИ ПРОЕКЦИИ ВЕКТОРА ПЕРЕМЕЩЕНИЙ 0 1 2 3 4 5 6 7 8 Х 4 Y
- 12. Скачать презентацию
ТУРЗ 1 (1) срок сдачи:
18 22 28 (РПД) - 3
61
ТУРЗ 1 (1) срок сдачи:
18 22 28 (РПД) - 3
61
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ
ОСНОВЫ КИНЕМАТИКИ
Урок 1/1
Введение,§1-6 ОК-1
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ
ОСНОВЫ КИНЕМАТИКИ
Урок 1/1
Введение,§1-6 ОК-1
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ- процесс изменения положения тела в пространстве относительно других тел
МЕХАНИЧЕСКОЕ ДВИЖЕНИЕ- процесс изменения положения тела в пространстве относительно других тел
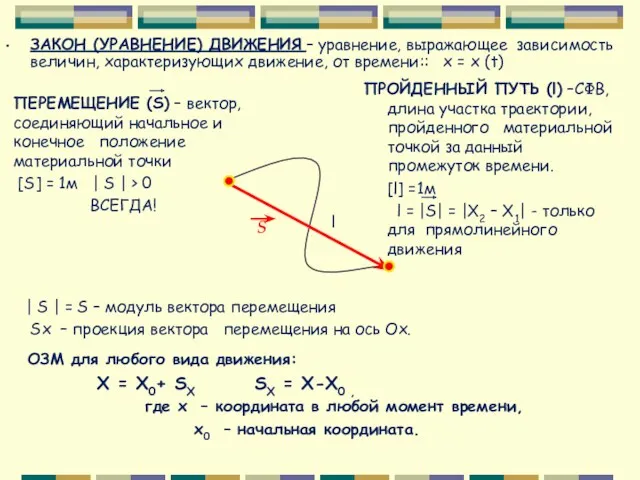
ЗАКОН (УРАВНЕНИЕ) ДВИЖЕНИЯ – уравнение, выражающее зависимость величин, характеризующих движение, от
ЗАКОН (УРАВНЕНИЕ) ДВИЖЕНИЯ – уравнение, выражающее зависимость величин, характеризующих движение, от
ПРОЕКЦИИ ВЕКТОРА НА ОСИ КООРДИНАТ
ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ - отрезок, соединяющий
ПРОЕКЦИИ ВЕКТОРА НА ОСИ КООРДИНАТ
ПРОЕКЦИЯ ВЕКТОРА НА ОСЬ - отрезок, соединяющий
ЗНАКИ ПРОЕКЦИЙ
а
в
с
х
aх> 0
вх< 0
сх= 0
Проекция вектора положительна, если от
ЗНАКИ ПРОЕКЦИЙ
а
в
с
х
aх> 0
вх< 0
сх= 0
Проекция вектора положительна, если от
ОЗМ для любого вида движения:
Связь проекции вектора перемещения и координаты тела
ОЗМ для любого вида движения:
Связь проекции вектора перемещения и координаты тела
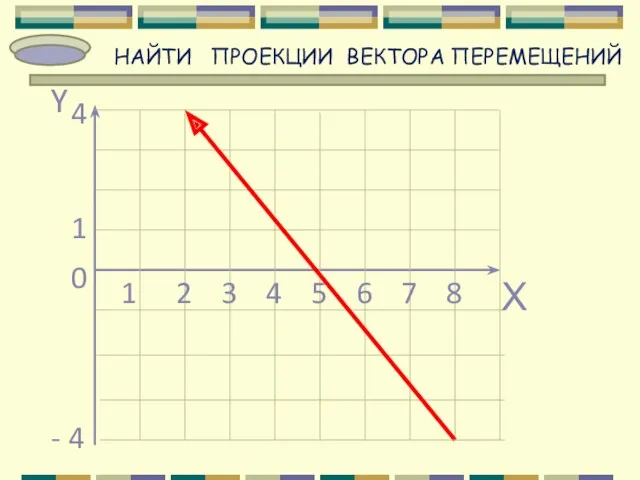
НАЙТИ ПРОЕКЦИИ ВЕКТОРА ПЕРЕМЕЩЕНИЙ
0
1
2
3
4
5
6
7
8
Х
4
Y
- 4
1
НАЙТИ ПРОЕКЦИИ ВЕКТОРА ПЕРЕМЕЩЕНИЙ
0
1
2
3
4
5
6
7
8
Х
4
Y
- 4
1
 Деление ядер урана. Цепные ядерные реакции
Деление ядер урана. Цепные ядерные реакции Электростатика. Постоянный ток. (Лекция 4)
Электростатика. Постоянный ток. (Лекция 4) Оптические приборы
Оптические приборы Необычные средства связи. Викторина
Необычные средства связи. Викторина DSG. Automatic and manual modes
DSG. Automatic and manual modes Оптичні явища у природі
Оптичні явища у природі Антенны и распространение радиоволн
Антенны и распространение радиоволн Принцип дії теплових двигунів
Принцип дії теплових двигунів Презентация Тест 11 класс. Итог
Презентация Тест 11 класс. Итог Деление атомных ядер. Цепная реакция. Термоядерный синтез
Деление атомных ядер. Цепная реакция. Термоядерный синтез Лазеры (или идеал, который создал человек)
Лазеры (или идеал, который создал человек) Катушки со сталью в цепи синусоидального тока
Катушки со сталью в цепи синусоидального тока Презентация по физике на тему _Шкала электромагнитных волн_
Презентация по физике на тему _Шкала электромагнитных волн_ Турбонаддув. Турбированный бензиновый двигатель
Турбонаддув. Турбированный бензиновый двигатель Магнитные преобразователи
Магнитные преобразователи Механическая работа и мощность
Механическая работа и мощность Ток в электролитах
Ток в электролитах Организация работ по диагностированию, техническому обслуживанию и ремонту ЗИЛ-5301. Процесс ремонта переднего моста
Организация работ по диагностированию, техническому обслуживанию и ремонту ЗИЛ-5301. Процесс ремонта переднего моста Основы теории подобия
Основы теории подобия Кристаллические и аморфные тела
Кристаллические и аморфные тела Закон Кулона
Закон Кулона Плавление и отвердевание
Плавление и отвердевание Основные положения МКТ. Физика. 10 класс
Основные положения МКТ. Физика. 10 класс Движение в неинерциальной системе отсчета
Движение в неинерциальной системе отсчета Магнитное поле катушки с током. Электромагниты и их применение. 8 класс
Магнитное поле катушки с током. Электромагниты и их применение. 8 класс Акустика. Затухание волн
Акустика. Затухание волн Компетентностный подход в образовании.
Компетентностный подход в образовании. Передача электромагнитной энергии. Волноводы
Передача электромагнитной энергии. Волноводы