- Передаточные функции и частотные характеристики идеальных и реальных регуляторов

Содержание
- 2. ПРИНЦИПЫ ПОСТРОЕНИЯ АВТОМАТИЧЕСКИХ СИСТЕМ Рис. 1.1. Элементы простого процесса Единичная цепь воздействия состоит из источника технического
- 3. . Для того чтобы любой простой процесс начал функционировать, необходимо следующее: 1) наличие потенциальных возможностей источника
- 4. Автоматическое регулирование Целью автоматического регулирования является поддержание заданного значения определенной физической величины, называемой управляемой или регулируемой
- 5. Принцип регулирования по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта) Рис.1.4. САР напряжения генератора, построенная
- 6. Принцип регулирования по возмущению – принцип Понселе заключается в том, что регулятор в системе реагирует на
- 7. Рис. 1.8. Функциональная схема системы комбинированного регулирования 19.03.2023 Передаточные функции и частотные характеристики идеальных и реальных
- 8. Понятия о функциональных схемах а) одна входная величина б) две входные величины Рис. 1.9. Примеры изображения
- 9. Функциональные схемы используются для анализа статических (установившихся) режимов систем. В этих режимах любой элемент характеризуется зависимостью
- 10. Рис. 1.13. Неоднозначные статические характеристики Некоторые элементы не имеют жесткой математической зависимости между входным и выходным
- 11. Для линейных элементов соотношение между входным и выходным сигналами записывается выражением , которое называется уравнением элемента
- 12. Зоной нечувствительности элемента называется максимальный диапазон изменения входного сигнала, при котором выходной сигнал ещё не изменяется
- 13. В схемах элементы могут соединяться между собой различным образом. Однако самые сложные схемы содержат три основных
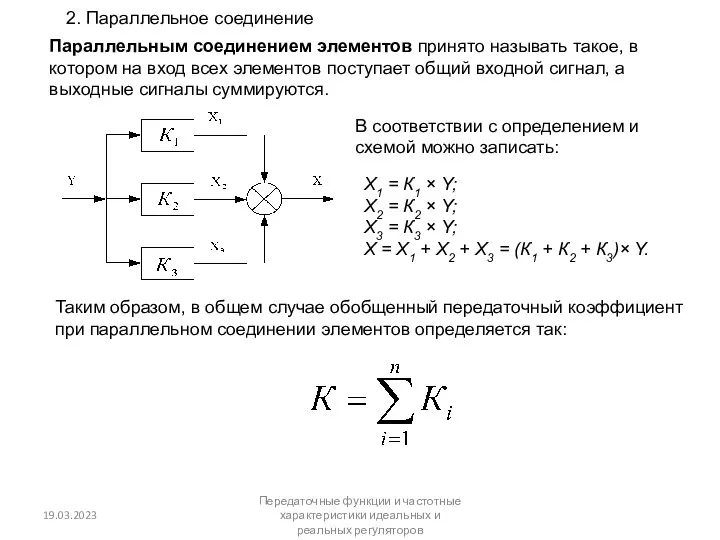
- 14. 2. Параллельное соединение Параллельным соединением элементов принято называть такое, в котором на вход всех элементов поступает
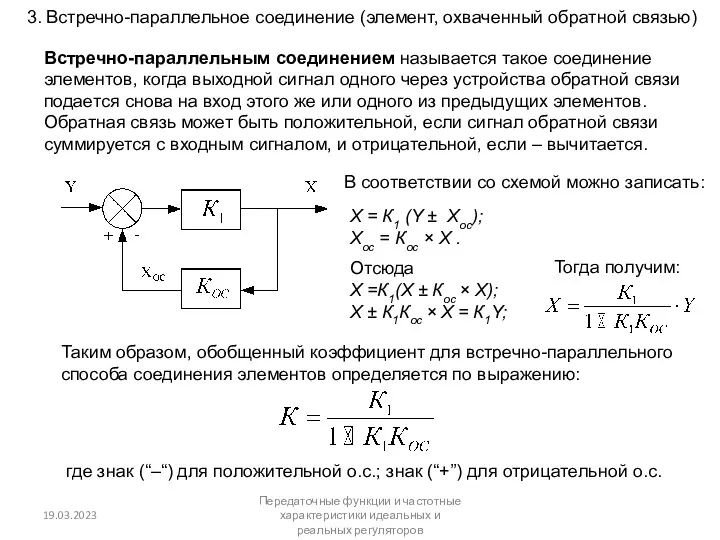
- 15. 3. Встречно-параллельное соединение (элемент, охваченный обратной связью) Встречно-параллельным соединением называется такое соединение элементов, когда выходной сигнал
- 16. СТАТИКА ЛИНЕЙНЫХ СИСТЕМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ Различают два основных состояния систем: статическое (установившийся режим); динамическое (режим переходного
- 17. Статическая система автоматического управления Уравнения статики для каждого элемента: Для О.Р. Х = КорХр – Коz
- 18. Статическая характеристика статической САР Основные свойства статических САР: 1) статическая ошибка в статических системах зависит от
- 19. Астатическая система Астатический элемент описывается уравнением О.Р. Х = Кор Хр - Коz Z Астатический элемент
- 20. Статическая характеристика астатической системы Свойства астатических систем: 19.03.2023 Передаточные функции и частотные характеристики идеальных и реальных
- 21. В общем виде уравнение системы автоматического управления n-го порядка после линеаризации: Для линейных системах: Динамика линейных
- 22. Применение операторных методов в теории автоматического управления прямое преобразование Лапласа При нулевых начальных условиях Уравнение линейной
- 23. Понятие о передаточной функции и комплексном передаточном коэффициенте Передаточной функцией в форме преобразования Лапласа принято называть
- 24. Преобразование Фурье отличается от преобразования Лапласа тем, что в качестве комплексного переменного используется комплекс частоты, т.е.
- 25. Понятие о переходных и частотных характеристиках Если получить графическое изображение переходного процесса в системе, т.е. x=f(t),
- 26. Физический смысл частотных характеристик – это различные аспекты реакции системы на синусоидальные входные сигналы различной частоты.
- 27. В практике построения частотных характеристик частота может меняться в очень широких пределах, поэтому линейные шкалы частот
- 28. Понятие о структурных схемах В статике использовалось понятие функциональной схемы, состоящей из элементов, а в динамике
- 29. Типовые звенья, их переходные и частотные характеристики Безынерционное звено х = к· у. Рис. Переходная характеристика
- 30. Рис. Амплитудно-фазовая частотная характеристика безынерционного звена Рис. Логарифмическая амплитудно-частотная характеристика безынерционного звена 19.03.2023 Передаточные функции и
- 31. Апериодическое звено 1 порядка Переходная характеристика Уравнение в операторной форме: Передаточная функция: Комплексный передаточный коэффициент: 19.03.2023
- 32. комплексный передаточный коэффициент: Апериодическое звено 1 порядка в.ч.х м.ч.х а.ч.х ф.ч.х Амплитудно-фазовая характеристика 19.03.2023 Передаточные функции
- 33. Апериодическое звено 1 порядка Логарифмическую амплитудно-частотную характеристику можно построить из выражения: Эту характеристику обычно строят не
- 34. Для любого звена 1-го порядка высокочастотный участок имеет наклон 20 дб/дек. Допущением является то, что характеристика
- 35. Интегрирующее звено Уравнение интегрирующего звена или где Ка – постоянный коэффициент При у=1: т.е. линейно нарастающая
- 36. Интегрирующее звено Для получения частотных характеристик необходимо записать уравнение интегрирующего звена в операторной форме: Передаточная функция:
- 37. Логарифмическая амплитудно-частотная характеристика строится из выражения Логарифмическая амплитудно-частотная характеристика 19.03.2023 Передаточные функции и частотные характеристики идеальных
- 38. Дифференцирующие звенья Три вида дифференцирующих звеньев со следующими уравнениями: 1) идеальное дифференцирующее звено 2) реальное дифференцирующее
- 39. Переходные характеристики дифференцирующих звеньев 19.03.2023 Передаточные функции и частотные характеристики идеальных и реальных регуляторов
- 40. Частотные характеристики идеального дифференцирующего звена Уравнение идеального дифференцирующего звена в операторной форме: Передаточная функция: Комплексный передаточный
- 41. Логарифмическая амплитудно-частотная характеристика идеального дифференцирующего звена может быть построена из выражения: ЛАЧХ идеального дифференцирующего звена 19.03.2023
- 42. Апериодическое (колебательное) звено 2-го порядка где Т – постоянная времени; ρ – коэффициент затухания; k –
- 43. Для построения частотных характеристик уравнение звена необходимо записать в операторной форме Передаточная функция: Комплексный передаточный коэффициент:
- 44. АЧХ ФЧХ 19.03.2023 Передаточные функции и частотные характеристики идеальных и реальных регуляторов
- 45. Амплитудно-фазовые характеристики звена 2-го порядка, т.е. кривые, описываемые вектором W(jɷ) в комплексной плоскости при изменении частоты
- 46. Частотные характеристики систем Рис.1. Разомкнутая система Передаточная функция этой системы: Комплексный передаточный коэффициент: или ЛАЧХ строится
- 47. Поскольку ЛАЧХ обычно строятся упрощённо, суммарную ЛАЧХ разомкнутой системы можно построить непосредственно по передаточной функции. Например,
- 48. Устойчивость линейных систем Система автоматического регулирования или любая другая система считаются устойчивыми, если, будучи выведенной из
- 49. Для того чтобы проанализировать систему на устойчивость, достаточно получить хсв, т.е. решить уравнение без правой части:
- 50. Алгебраические критерии устойчивости Формулировка критерия Гурвица: Для того чтобы все корни характеристического уравнения системы имели отрицательную
- 51. Пример. Рис. 2.Структурная схема системы Передаточная функция замкнутой системы 19.03.2023 Передаточные функции и частотные характеристики идеальных
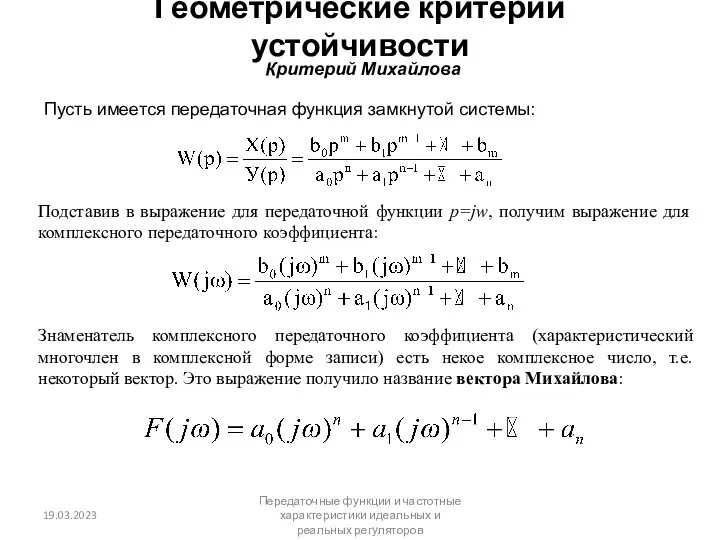
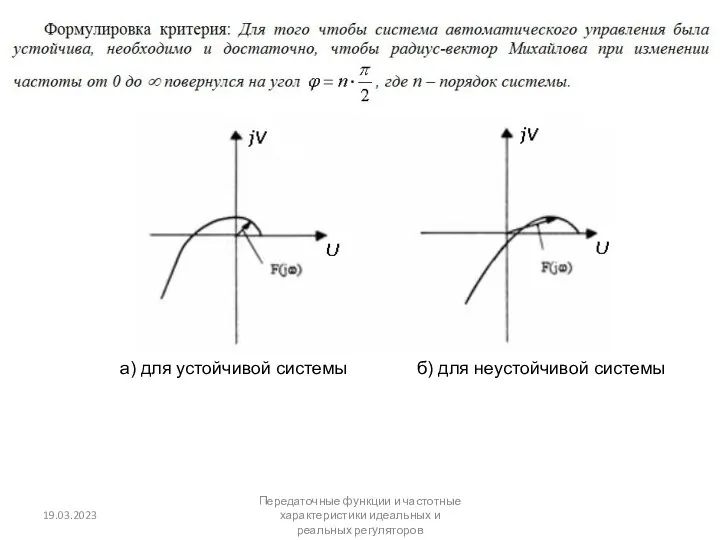
- 52. Геометрические критерии устойчивости Критерий Михайлова Пусть имеется передаточная функция замкнутой системы: Подставив в выражение для передаточной
- 53. а) для устойчивой системы б) для неустойчивой системы 19.03.2023 Передаточные функции и частотные характеристики идеальных и
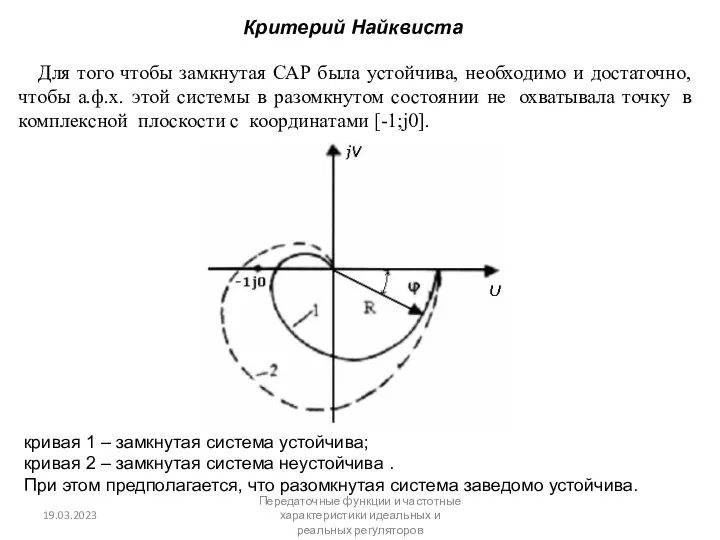
- 54. Критерий Найквиста Для того чтобы замкнутая САР была устойчива, необходимо и достаточно, чтобы а.ф.х. этой системы
- 55. а) для устойчивой системы б) для неустойчивой системы 19.03.2023 Передаточные функции и частотные характеристики идеальных и
- 56. Логарифмический критерий устойчивости Позволяет судить об устойчивости замкнутой САР по логарифмическим амплитудно-частотной и фазово-частотной характеристикам этой
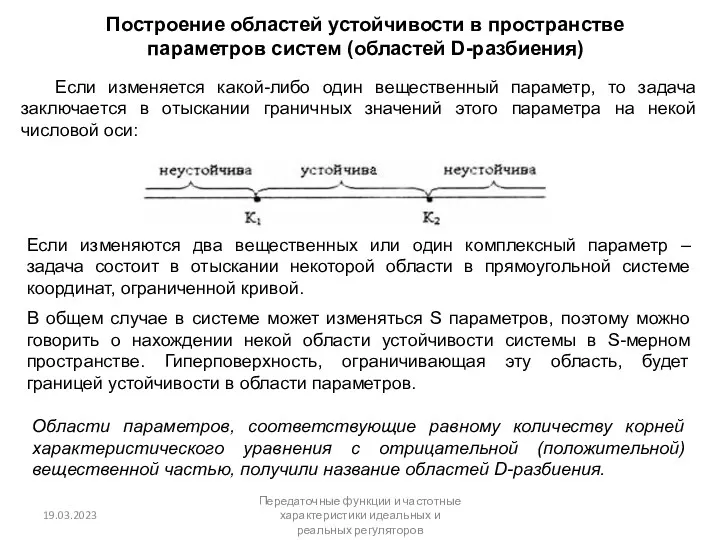
- 57. Построение областей устойчивости в пространстве параметров систем (областей D-разбиения) Если изменяется какой-либо один вещественный параметр, то
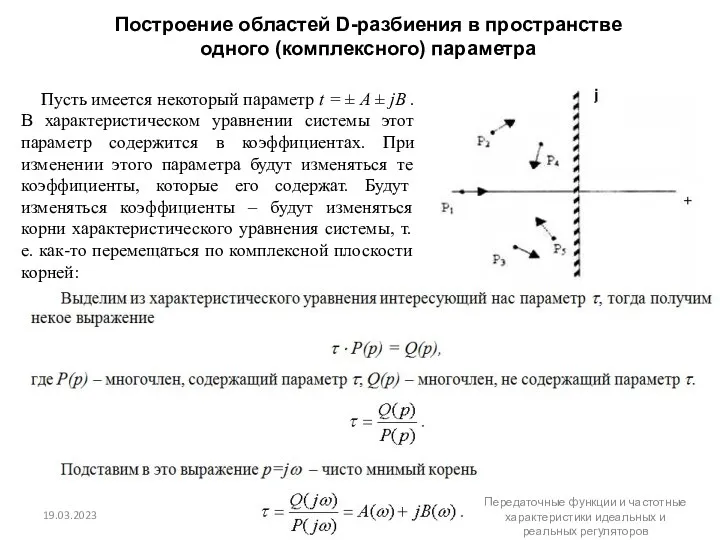
- 58. Построение областей D-разбиения в пространстве одного (комплексного) параметра Пусть имеется некоторый параметр t = ± А
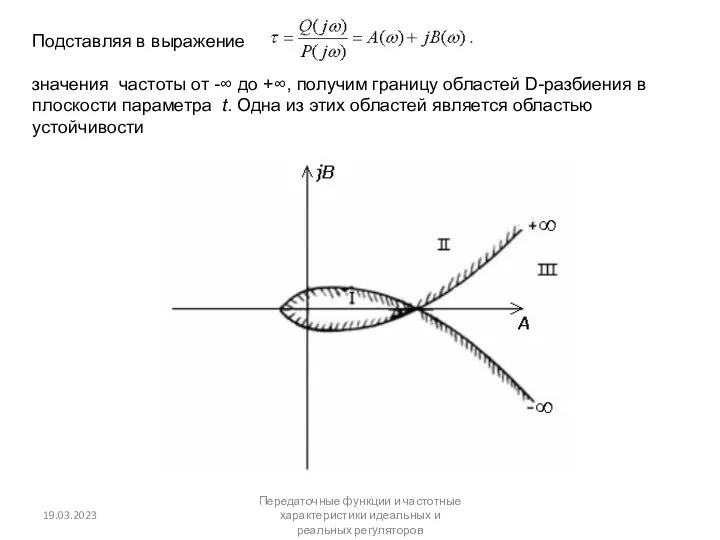
- 59. Подставляя в выражение значения частоты от -∞ до +∞, получим границу областей D-разбиения в плоскости параметра
- 60. Запас устойчивости системы Запас устойчивости предусматривает некоторое удаление расчётных параметров от значений, соответствующих границе устойчивости. Формулировка
- 61. Качество переходного процесса в системах и методы его исследования Качество процесса оценивается следующими основными показателями: 1.
- 62. 3. Быстродействие системы Быстродействие характеризует скорость реагирования САР на внешние воздействия. Для оценки быстродействия используется величина
- 63. 4. Перерегулирование Характеризует отклонение выходного сигнала от установившегося значения в переходном процессе. Оценка идет по максимальному
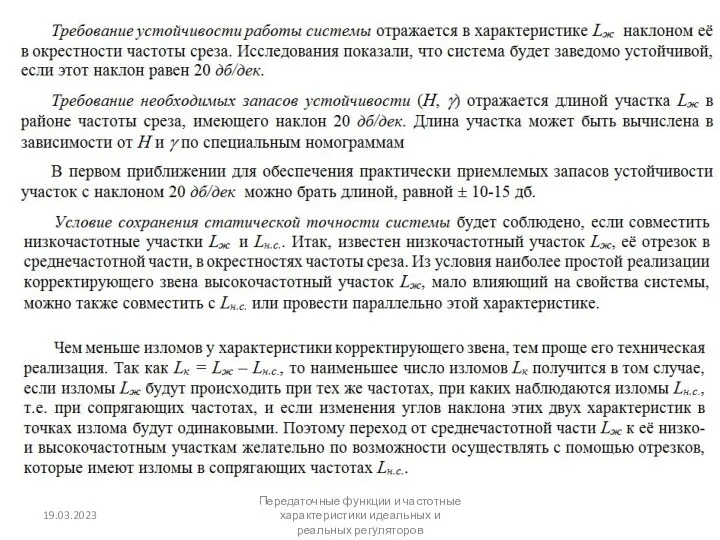
- 64. Коррекция систем автоматического управления Необходимость в коррекции систем возникает при их проектировании или настройке. Обеспечение устойчивой
- 65. . Задача синтеза корректирующего звена по заданным показателям качества решается в следующей последовательности: 1) по заданным
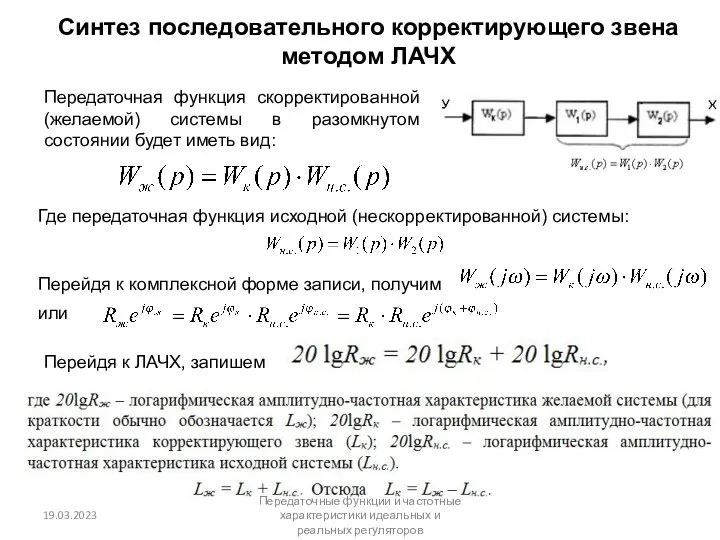
- 66. Синтез последовательного корректирующего звена методом ЛАЧХ Передаточная функция скорректированной (желаемой) системы в разомкнутом состоянии будет иметь
- 67. Синтез последовательного корректирующего звена можно осуществить в следующей последовательности: 19.03.2023 Передаточные функции и частотные характеристики идеальных
- 68. 19.03.2023 Передаточные функции и частотные характеристики идеальных и реальных регуляторов
- 69. Запишем передаточную функцию исходной системы в разомкнутом состоянии: 19.03.2023 Передаточные функции и частотные характеристики идеальных и
- 70. По характеристике Lк запишем передаточную функцию 19.03.2023 Передаточные функции и частотные характеристики идеальных и реальных регуляторов
- 71. Самостоятельная работа Нарисовать график устойчивости Найквиста. Нарисовать график перерегулирования. 19.03.2023 Передаточные функции и частотные характеристики идеальных
- 73. Скачать презентацию
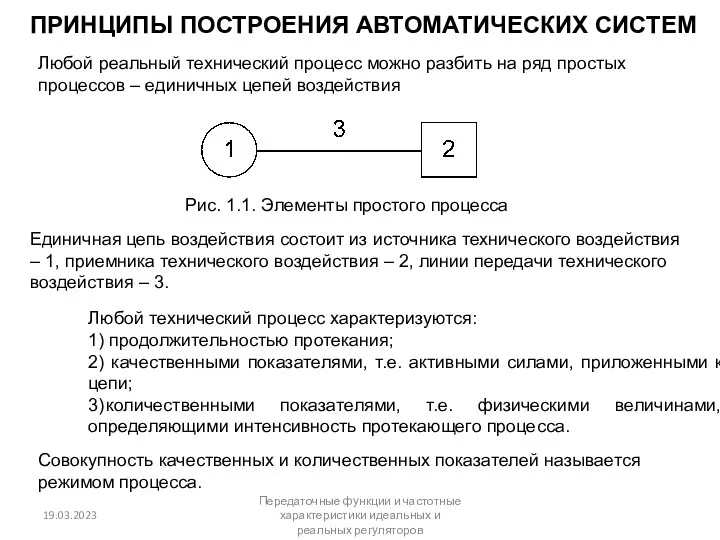
ПРИНЦИПЫ ПОСТРОЕНИЯ АВТОМАТИЧЕСКИХ СИСТЕМ
Рис. 1.1. Элементы простого процесса
Единичная цепь воздействия состоит
ПРИНЦИПЫ ПОСТРОЕНИЯ АВТОМАТИЧЕСКИХ СИСТЕМ
Рис. 1.1. Элементы простого процесса
Единичная цепь воздействия состоит
.
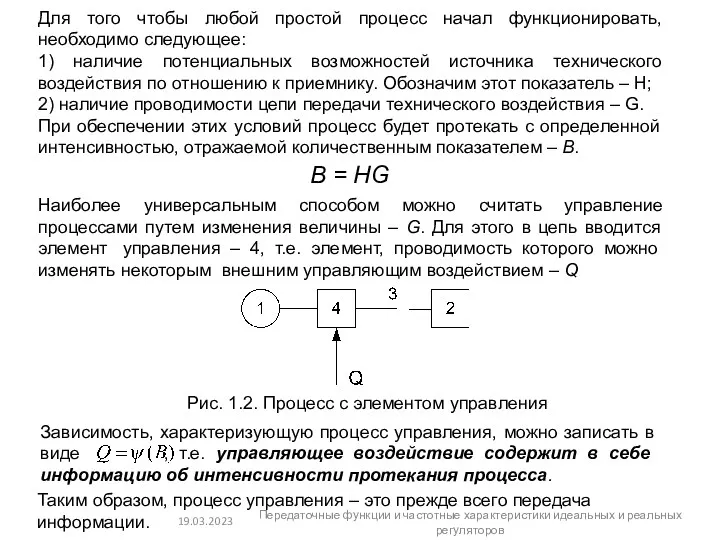
Для того чтобы любой простой процесс начал функционировать, необходимо следующее:
1) наличие
.
Для того чтобы любой простой процесс начал функционировать, необходимо следующее:
1) наличие
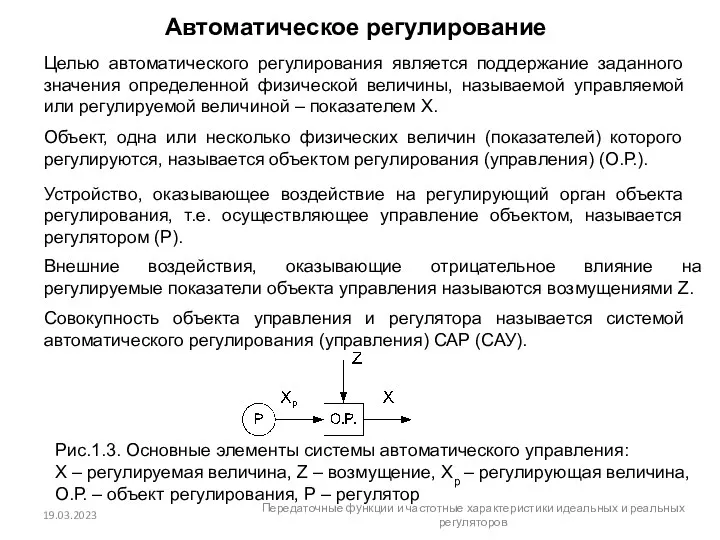
Автоматическое регулирование
Целью автоматического регулирования является поддержание заданного значения определенной физической величины,
Автоматическое регулирование
Целью автоматического регулирования является поддержание заданного значения определенной физической величины,
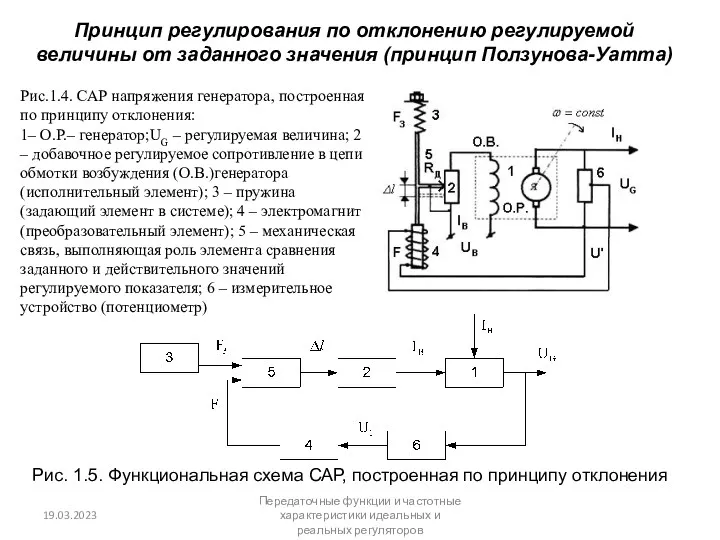
Принцип регулирования по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта)
Рис.1.4.
Принцип регулирования по отклонению регулируемой величины от заданного значения (принцип Ползунова-Уатта)
Рис.1.4.
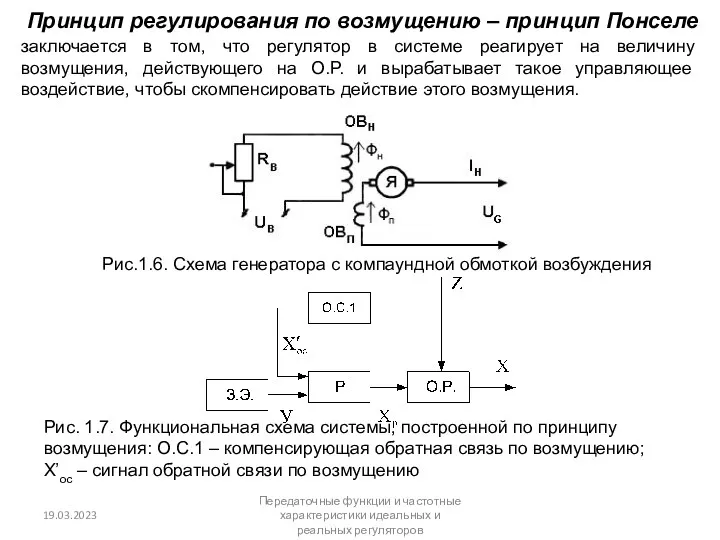
Принцип регулирования по возмущению – принцип Понселе
заключается в том, что регулятор
Принцип регулирования по возмущению – принцип Понселе
заключается в том, что регулятор
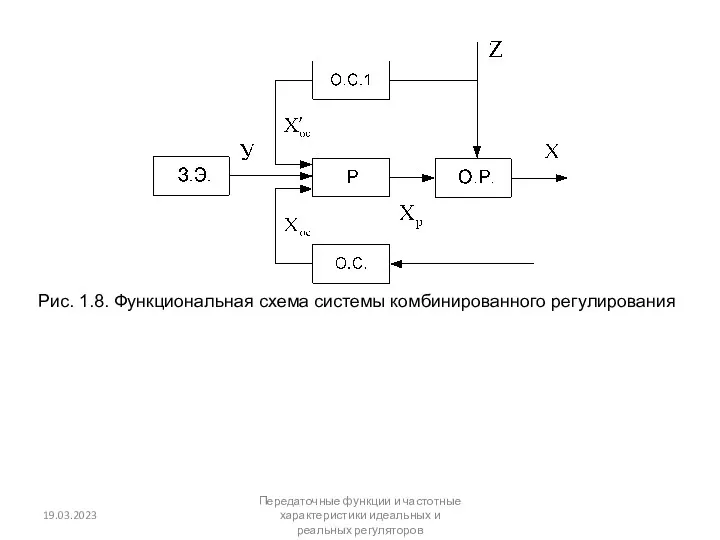
Рис. 1.8. Функциональная схема системы комбинированного регулирования
19.03.2023
Передаточные функции и частотные характеристики
Рис. 1.8. Функциональная схема системы комбинированного регулирования
19.03.2023
Передаточные функции и частотные характеристики
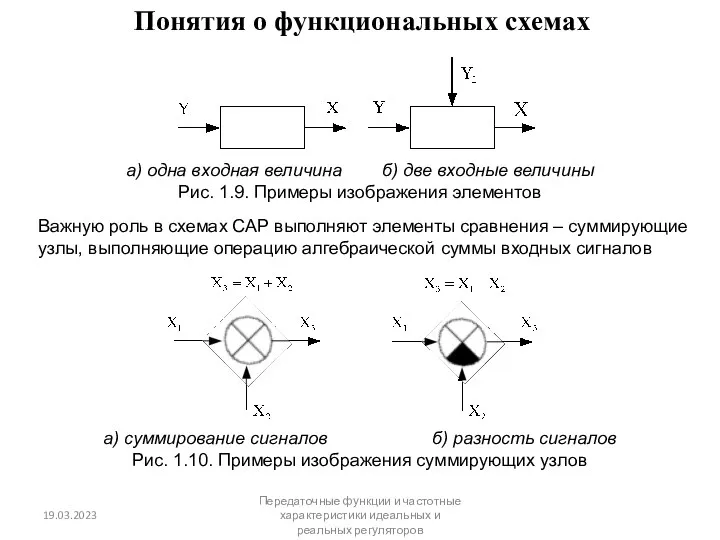
Понятия о функциональных схемах
а) одна входная величина б) две входные величины
Рис.
Понятия о функциональных схемах
а) одна входная величина б) две входные величины
Рис.
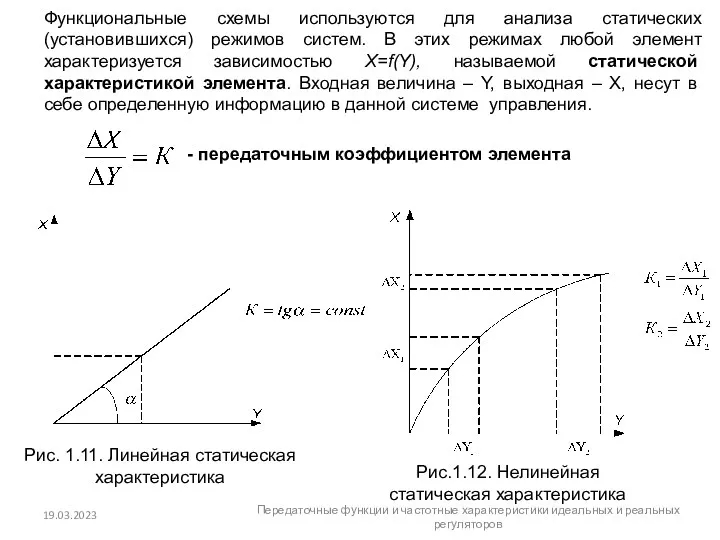
Функциональные схемы используются для анализа статических (установившихся) режимов систем. В этих
Функциональные схемы используются для анализа статических (установившихся) режимов систем. В этих
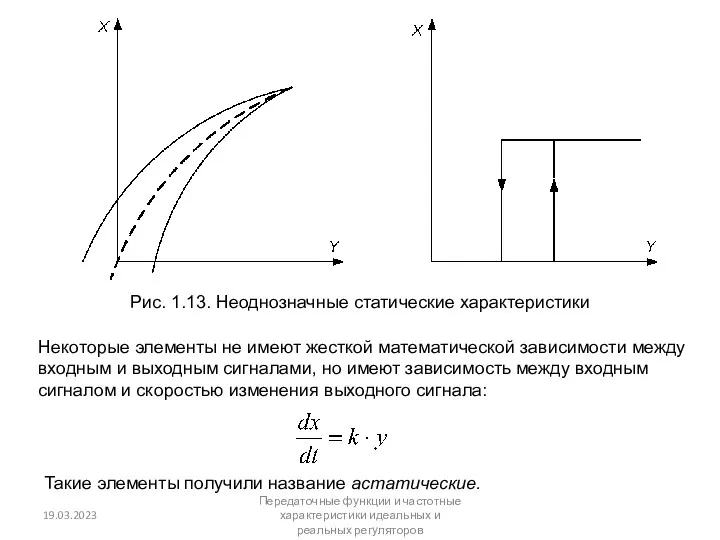
Рис. 1.13. Неоднозначные статические характеристики
Некоторые элементы не имеют жесткой математической зависимости
Рис. 1.13. Неоднозначные статические характеристики
Некоторые элементы не имеют жесткой математической зависимости
Для линейных элементов соотношение между входным и выходным сигналами записывается выражением
Для линейных элементов соотношение между входным и выходным сигналами записывается выражением
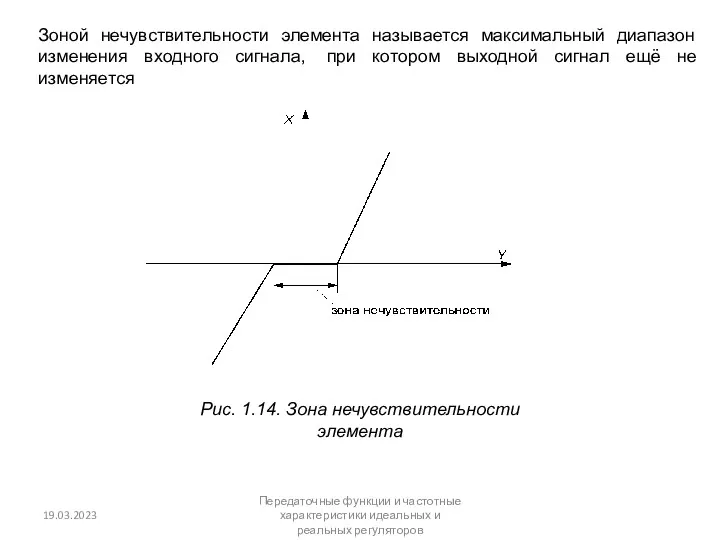
Зоной нечувствительности элемента называется максимальный диапазон изменения входного сигнала, при котором
Зоной нечувствительности элемента называется максимальный диапазон изменения входного сигнала, при котором
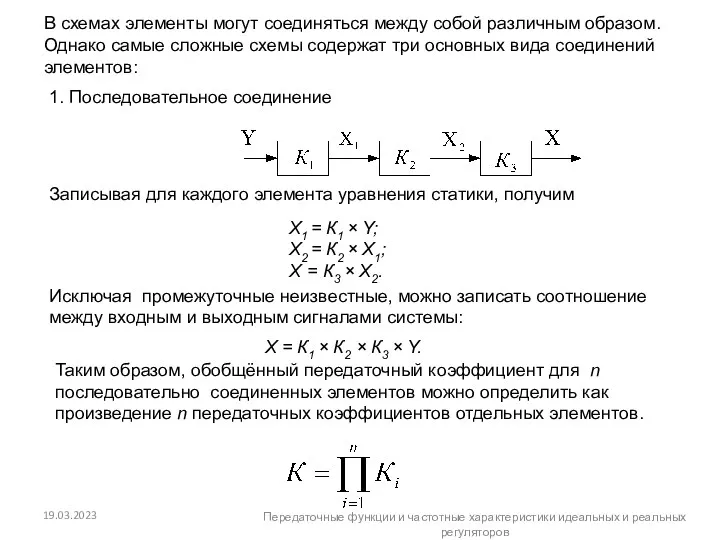
В схемах элементы могут соединяться между собой различным образом. Однако самые
В схемах элементы могут соединяться между собой различным образом. Однако самые
2. Параллельное соединение
Параллельным соединением элементов принято называть такое, в котором на
2. Параллельное соединение
Параллельным соединением элементов принято называть такое, в котором на
3. Встречно-параллельное соединение (элемент, охваченный обратной связью)
Встречно-параллельным соединением называется такое соединение
3. Встречно-параллельное соединение (элемент, охваченный обратной связью)
Встречно-параллельным соединением называется такое соединение
СТАТИКА ЛИНЕЙНЫХ СИСТЕМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Различают два основных состояния систем:
статическое (установившийся режим);
СТАТИКА ЛИНЕЙНЫХ СИСТЕМ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Различают два основных состояния систем:
статическое (установившийся режим);
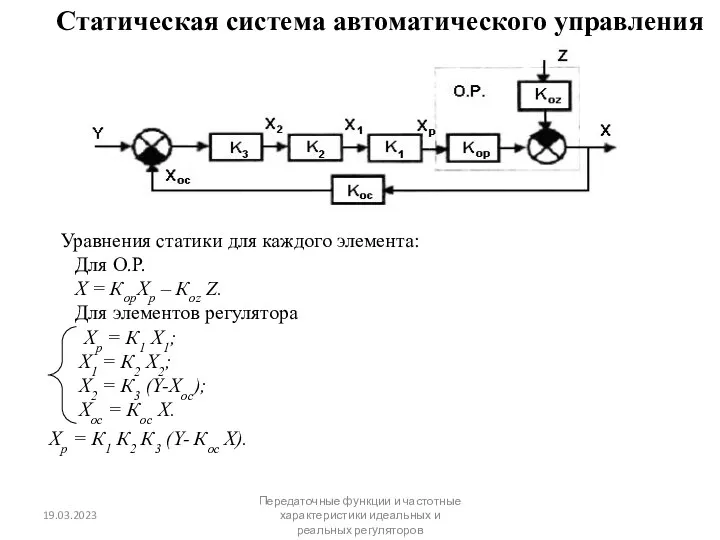
Статическая система автоматического управления
Уравнения статики для каждого элемента:
Для О.Р.
Х = КорХр
Статическая система автоматического управления
Уравнения статики для каждого элемента:
Для О.Р.
Х = КорХр
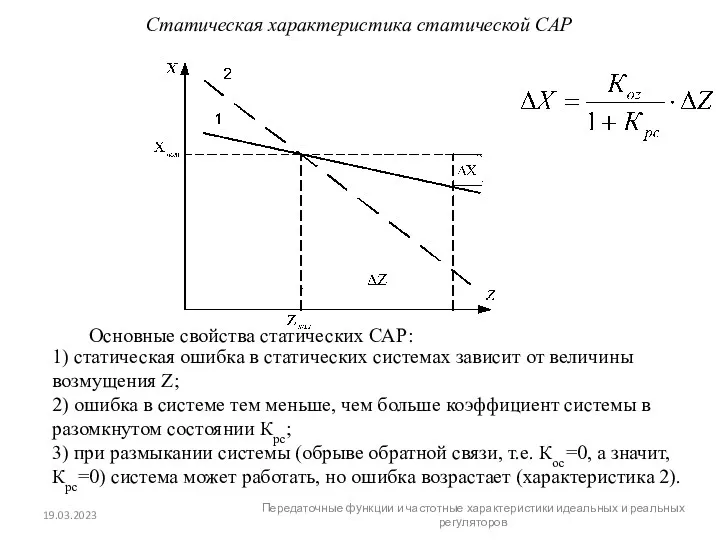
Статическая характеристика статической САР
Основные свойства статических САР:
1) статическая ошибка в статических
Статическая характеристика статической САР
Основные свойства статических САР:
1) статическая ошибка в статических
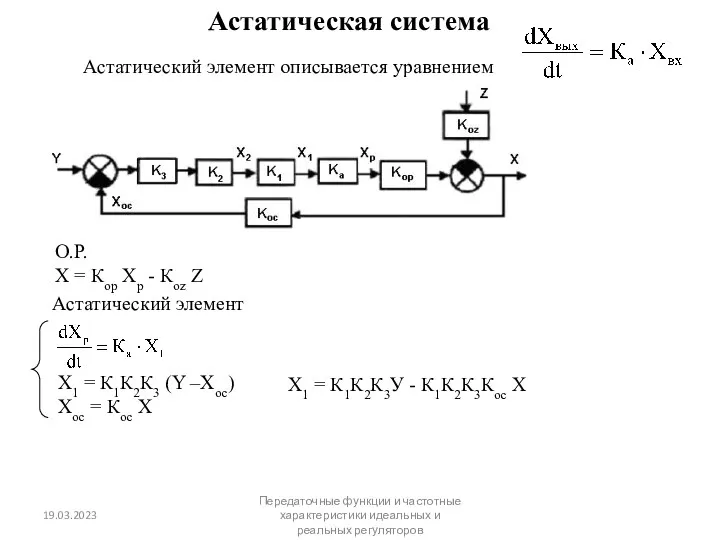
Астатическая система
Астатический элемент описывается уравнением
О.Р.
Х = Кор Хр -
Астатическая система
Астатический элемент описывается уравнением
О.Р.
Х = Кор Хр -
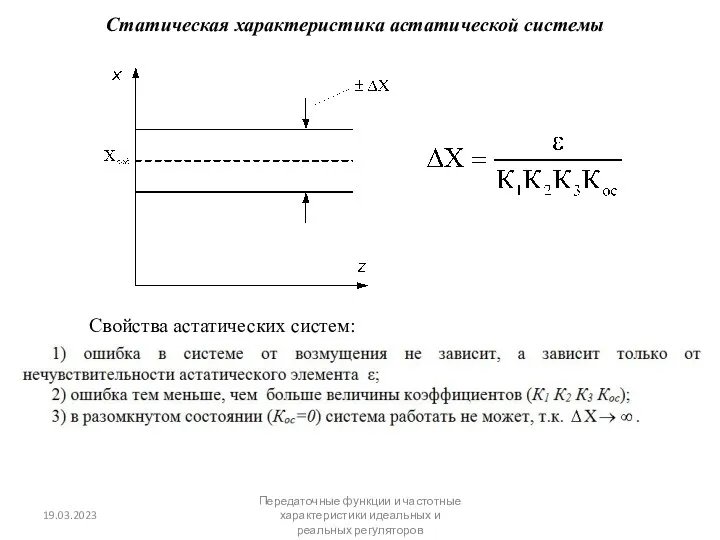
Статическая характеристика астатической системы
Свойства астатических систем:
19.03.2023
Передаточные функции и частотные характеристики идеальных
Статическая характеристика астатической системы
Свойства астатических систем:
19.03.2023
Передаточные функции и частотные характеристики идеальных
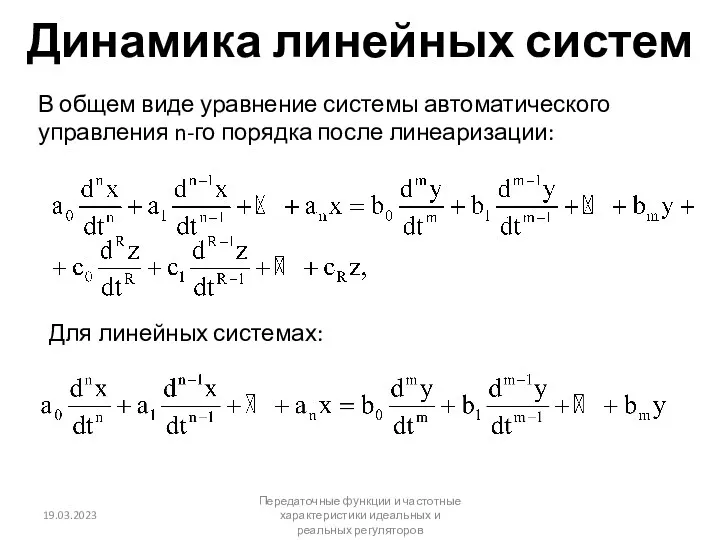
В общем виде уравнение системы автоматического управления n-го порядка после линеаризации:
В общем виде уравнение системы автоматического управления n-го порядка после линеаризации:
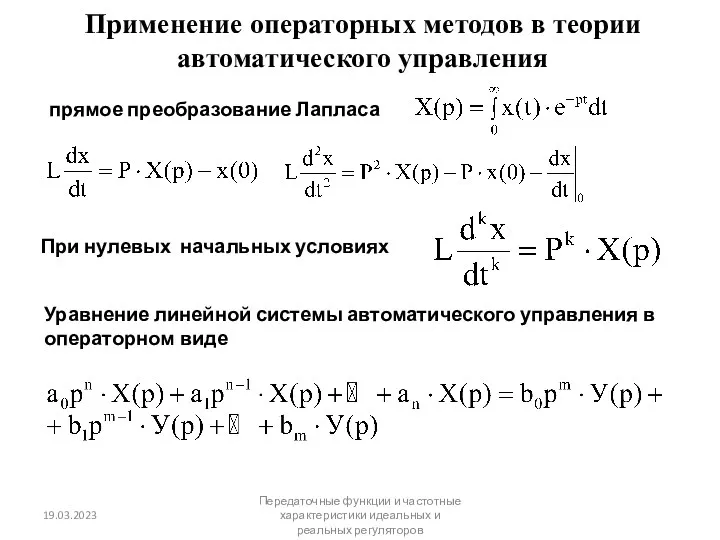
Применение операторных методов в теории автоматического управления
прямое преобразование Лапласа
При нулевых начальных
Применение операторных методов в теории автоматического управления
прямое преобразование Лапласа
При нулевых начальных
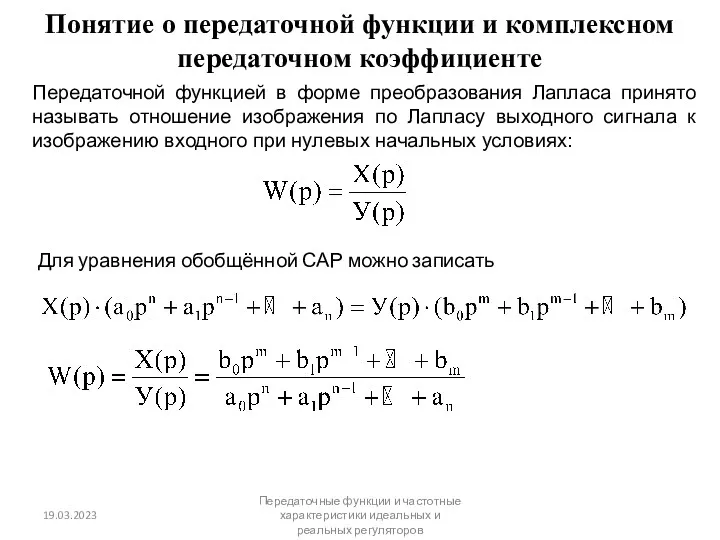
Понятие о передаточной функции и комплексном передаточном коэффициенте
Передаточной функцией в форме
Понятие о передаточной функции и комплексном передаточном коэффициенте
Передаточной функцией в форме
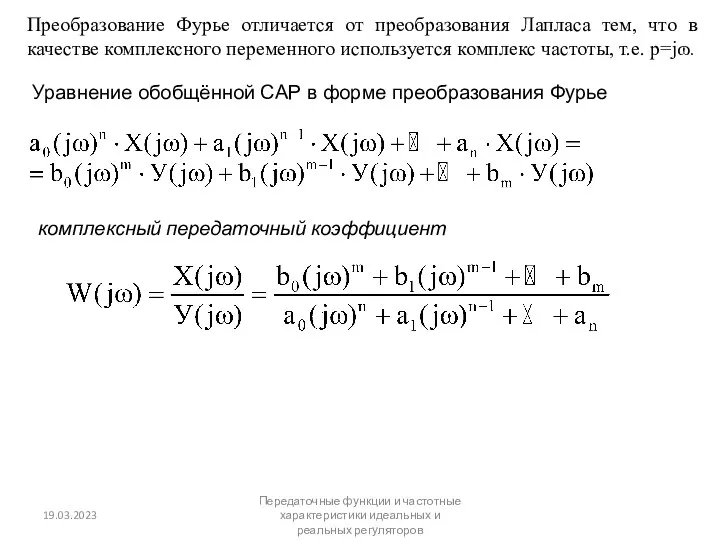
Преобразование Фурье отличается от преобразования Лапласа тем, что в качестве комплексного
Преобразование Фурье отличается от преобразования Лапласа тем, что в качестве комплексного
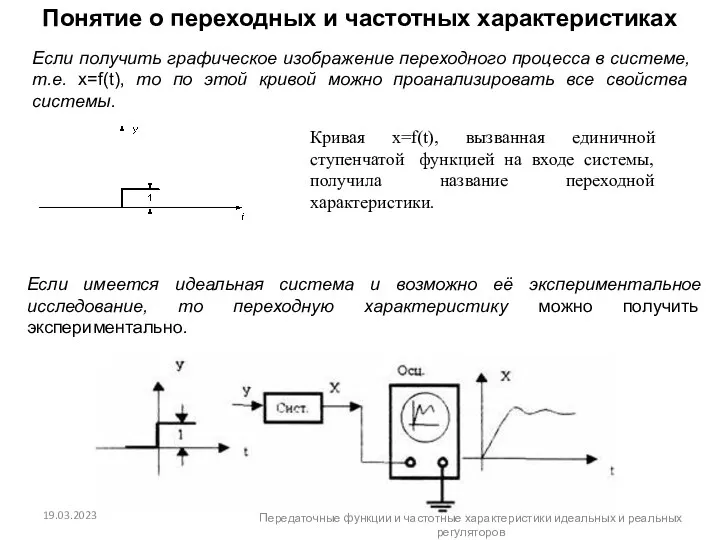
Понятие о переходных и частотных характеристиках
Если получить графическое изображение переходного процесса
Понятие о переходных и частотных характеристиках
Если получить графическое изображение переходного процесса
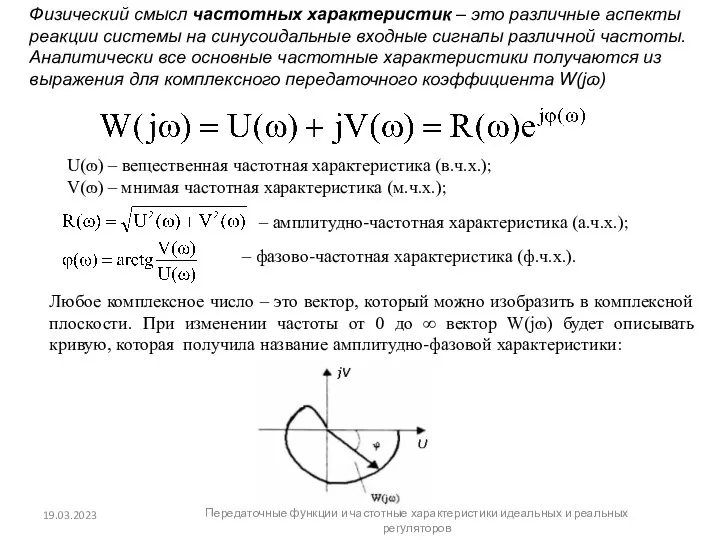
Физический смысл частотных характеристик – это различные аспекты реакции системы на
Физический смысл частотных характеристик – это различные аспекты реакции системы на
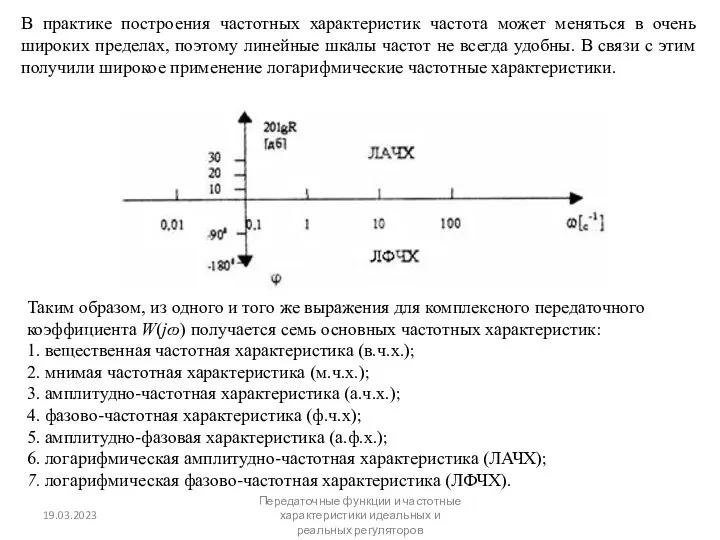
В практике построения частотных характеристик частота может меняться в очень широких
В практике построения частотных характеристик частота может меняться в очень широких
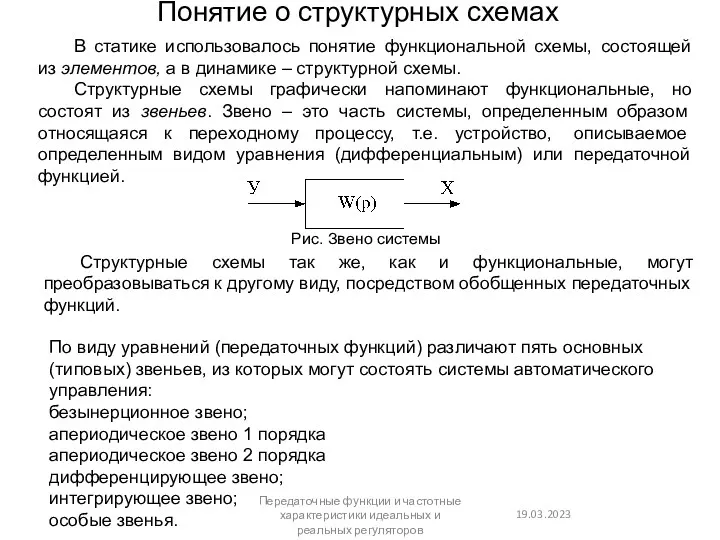
Понятие о структурных схемах
В статике использовалось понятие функциональной схемы, состоящей из
Понятие о структурных схемах
В статике использовалось понятие функциональной схемы, состоящей из
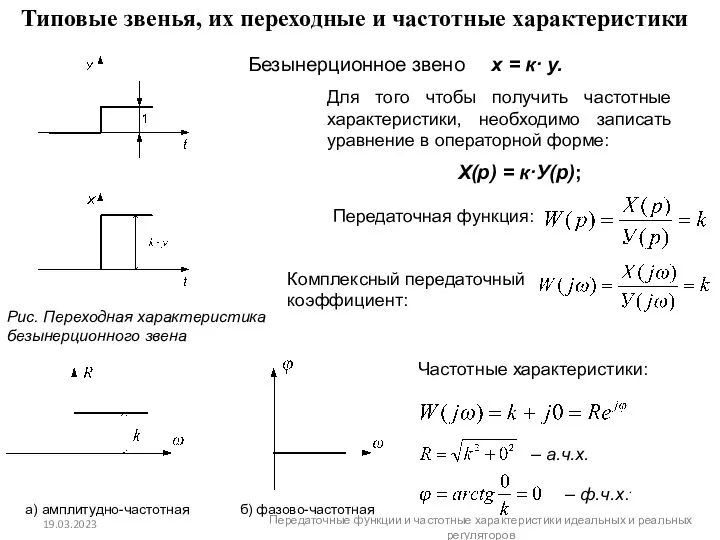
Типовые звенья, их переходные и частотные характеристики
Безынерционное звено
х = к·
Типовые звенья, их переходные и частотные характеристики
Безынерционное звено
х = к·
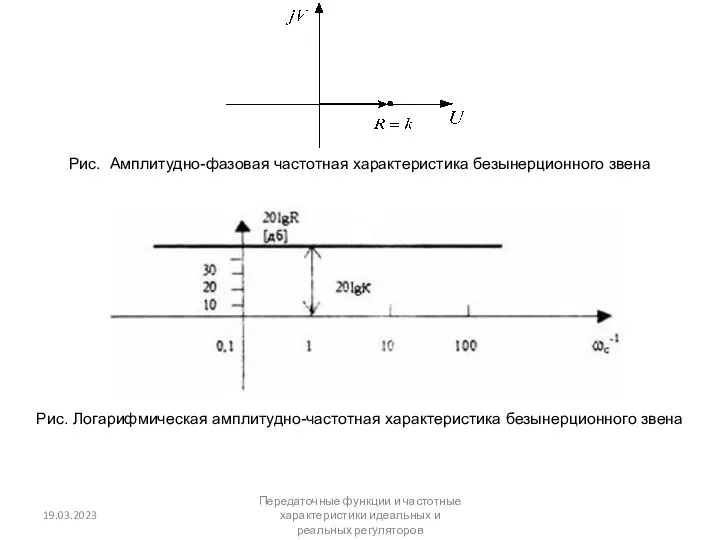
Рис. Амплитудно-фазовая частотная характеристика безынерционного звена
Рис. Логарифмическая амплитудно-частотная характеристика безынерционного звена
19.03.2023
Передаточные
Рис. Амплитудно-фазовая частотная характеристика безынерционного звена
Рис. Логарифмическая амплитудно-частотная характеристика безынерционного звена
19.03.2023
Передаточные
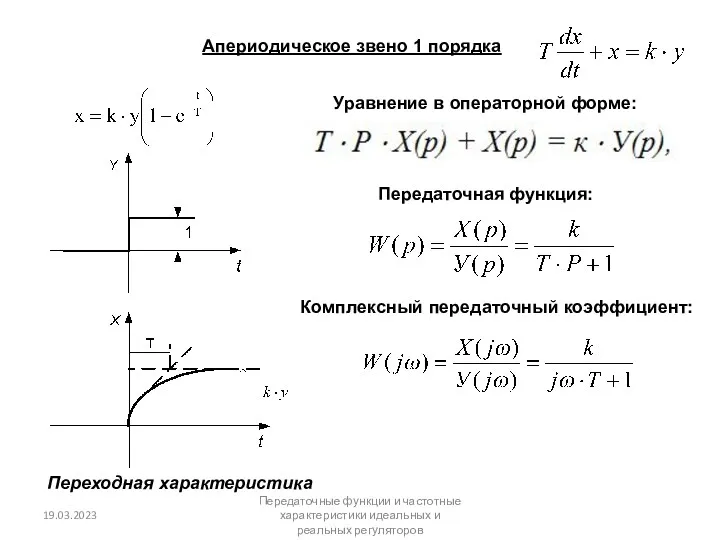
Апериодическое звено 1 порядка
Переходная характеристика
Уравнение в операторной форме:
Передаточная функция:
Комплексный передаточный коэффициент:
19.03.2023
Передаточные
Апериодическое звено 1 порядка
Переходная характеристика
Уравнение в операторной форме:
Передаточная функция:
Комплексный передаточный коэффициент:
19.03.2023
Передаточные
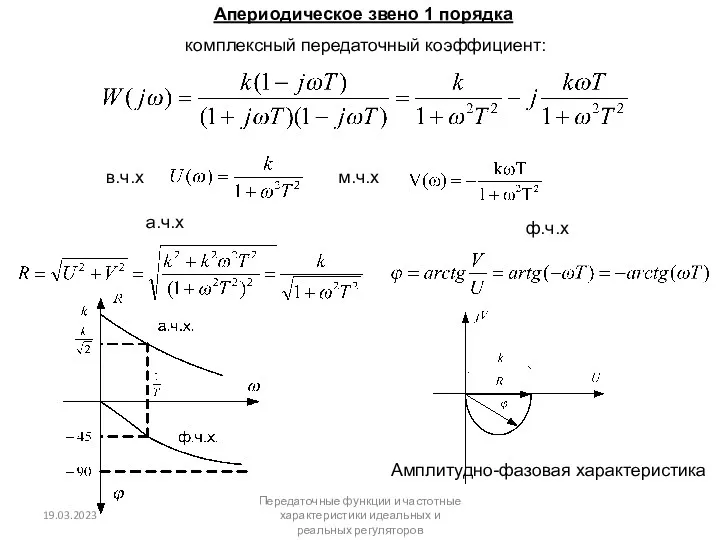
комплексный передаточный коэффициент:
Апериодическое звено 1 порядка
в.ч.х
м.ч.х
а.ч.х
ф.ч.х
Амплитудно-фазовая характеристика
19.03.2023
Передаточные функции и частотные характеристики
комплексный передаточный коэффициент:
Апериодическое звено 1 порядка
в.ч.х
м.ч.х
а.ч.х
ф.ч.х
Амплитудно-фазовая характеристика
19.03.2023
Передаточные функции и частотные характеристики
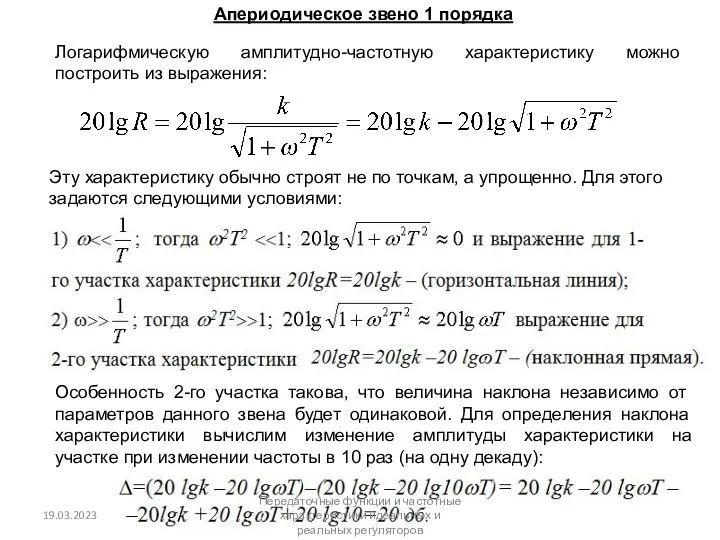
Апериодическое звено 1 порядка
Логарифмическую амплитудно-частотную характеристику можно построить из выражения:
Эту характеристику
Апериодическое звено 1 порядка
Логарифмическую амплитудно-частотную характеристику можно построить из выражения:
Эту характеристику
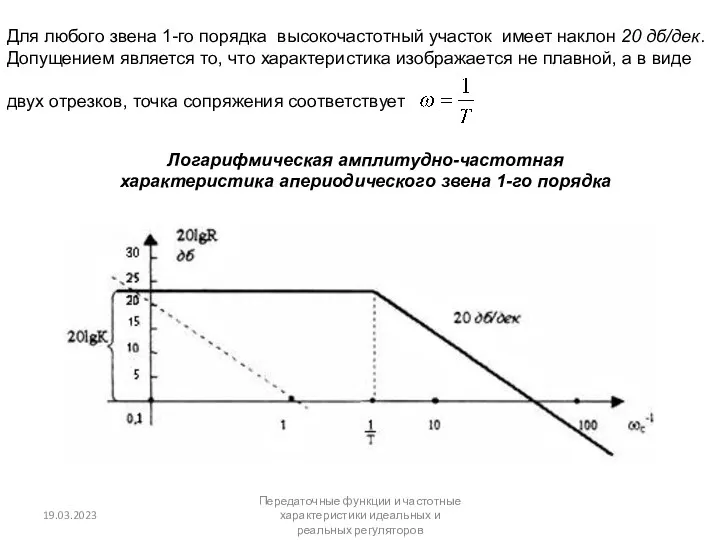
Для любого звена 1-го порядка высокочастотный участок имеет наклон 20 дб/дек.
Для любого звена 1-го порядка высокочастотный участок имеет наклон 20 дб/дек.
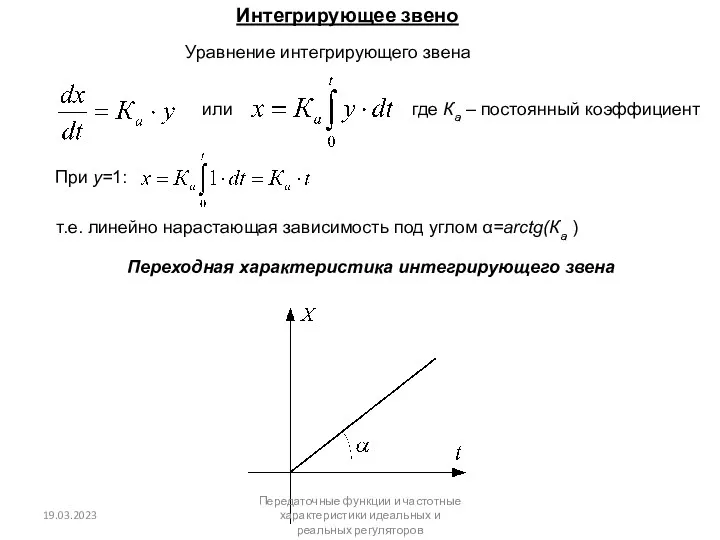
Интегрирующее звено
Уравнение интегрирующего звена
или
где Ка – постоянный коэффициент
При у=1:
т.е. линейно нарастающая
Интегрирующее звено
Уравнение интегрирующего звена
или
где Ка – постоянный коэффициент
При у=1:
т.е. линейно нарастающая
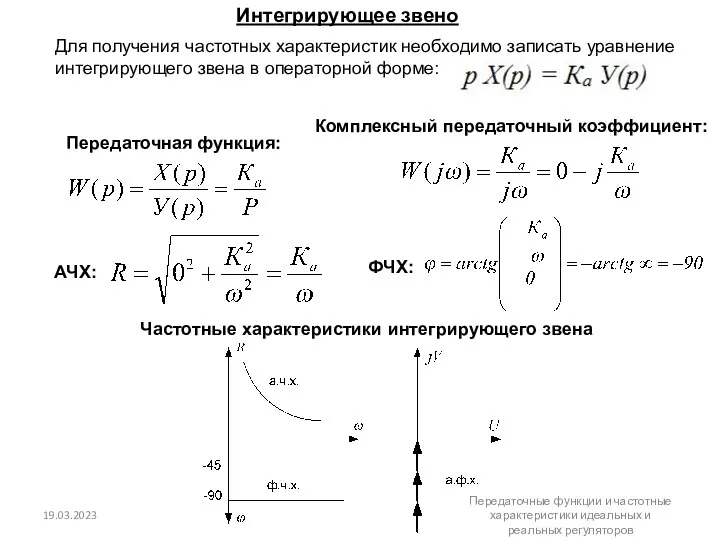
Интегрирующее звено
Для получения частотных характеристик необходимо записать уравнение интегрирующего звена в операторной
Интегрирующее звено
Для получения частотных характеристик необходимо записать уравнение интегрирующего звена в операторной
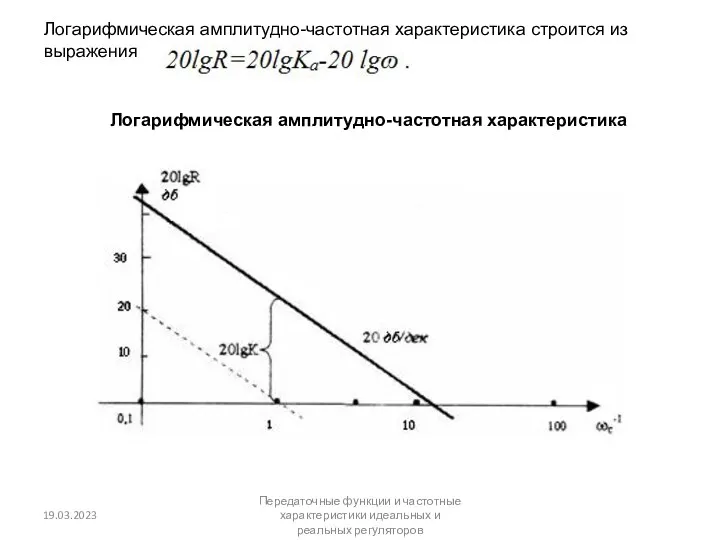
Логарифмическая амплитудно-частотная характеристика строится из выражения
Логарифмическая амплитудно-частотная характеристика
19.03.2023
Передаточные функции и частотные
Логарифмическая амплитудно-частотная характеристика строится из выражения
Логарифмическая амплитудно-частотная характеристика
19.03.2023
Передаточные функции и частотные
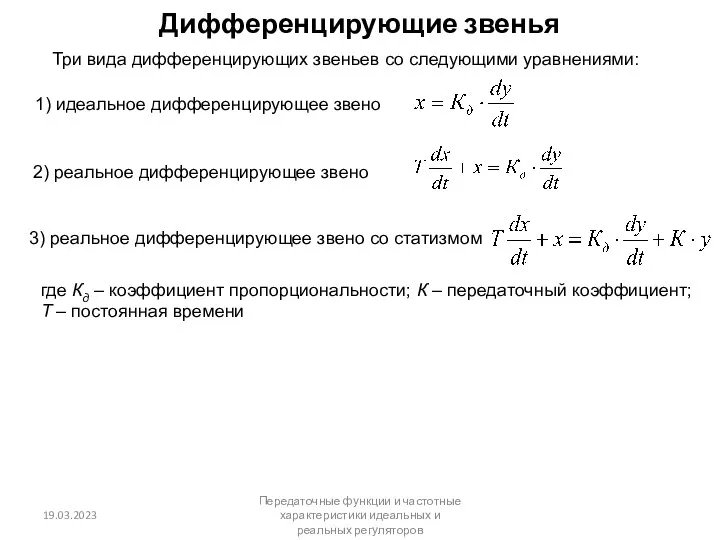
Дифференцирующие звенья
Три вида дифференцирующих звеньев со следующими уравнениями:
1) идеальное дифференцирующее звено
2)
Дифференцирующие звенья
Три вида дифференцирующих звеньев со следующими уравнениями:
1) идеальное дифференцирующее звено
2)
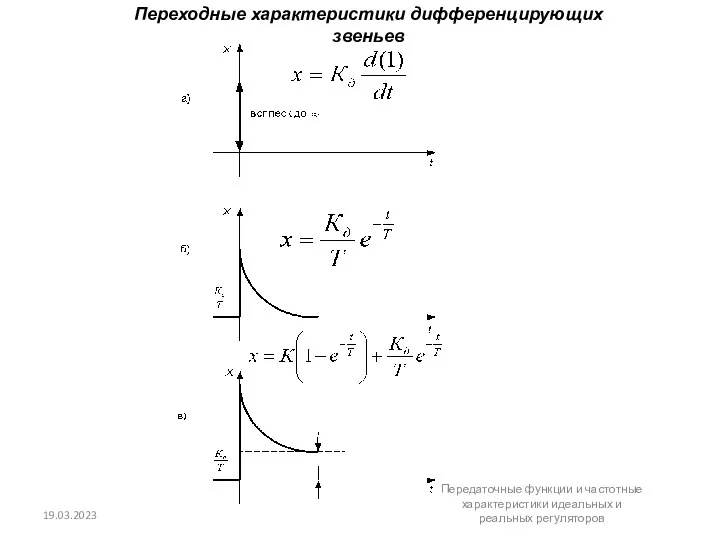
Переходные характеристики дифференцирующих звеньев
19.03.2023
Передаточные функции и частотные характеристики идеальных и реальных
Переходные характеристики дифференцирующих звеньев
19.03.2023
Передаточные функции и частотные характеристики идеальных и реальных
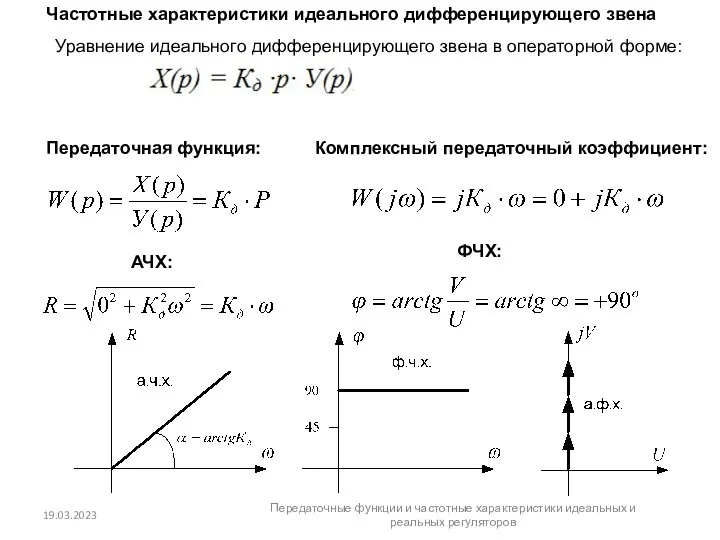
Частотные характеристики идеального дифференцирующего звена
Уравнение идеального дифференцирующего звена в операторной форме:
Передаточная
Частотные характеристики идеального дифференцирующего звена
Уравнение идеального дифференцирующего звена в операторной форме:
Передаточная
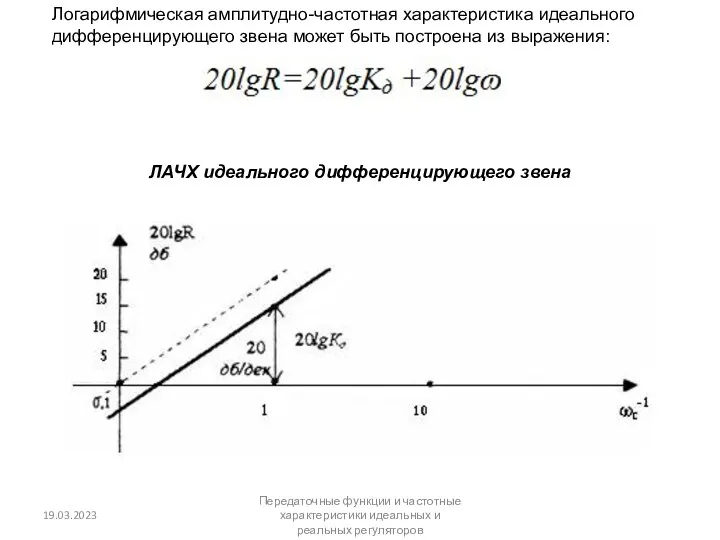
Логарифмическая амплитудно-частотная характеристика идеального дифференцирующего звена может быть построена из выражения:
ЛАЧХ
Логарифмическая амплитудно-частотная характеристика идеального дифференцирующего звена может быть построена из выражения:
ЛАЧХ
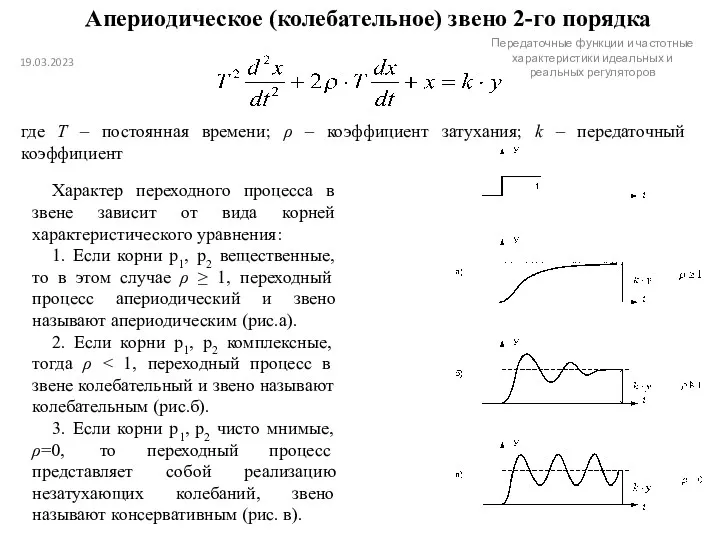
Апериодическое (колебательное) звено 2-го порядка
где Т – постоянная времени; ρ –
Апериодическое (колебательное) звено 2-го порядка
где Т – постоянная времени; ρ –
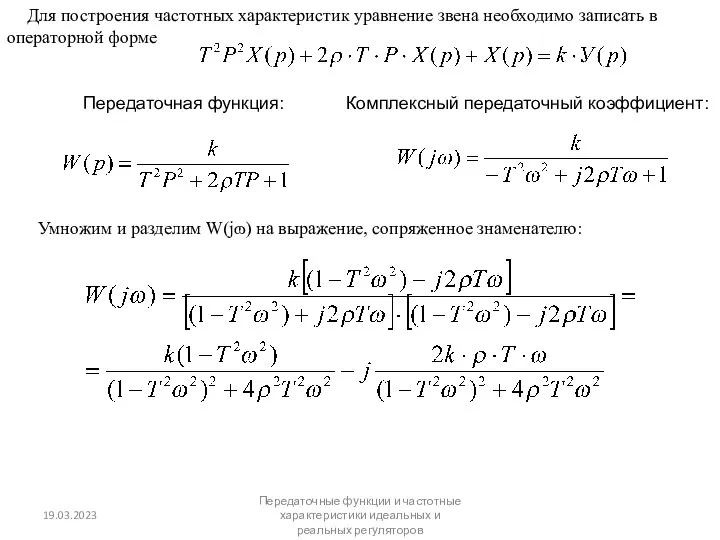
Для построения частотных характеристик уравнение звена необходимо записать в операторной форме
Передаточная
Для построения частотных характеристик уравнение звена необходимо записать в операторной форме
Передаточная
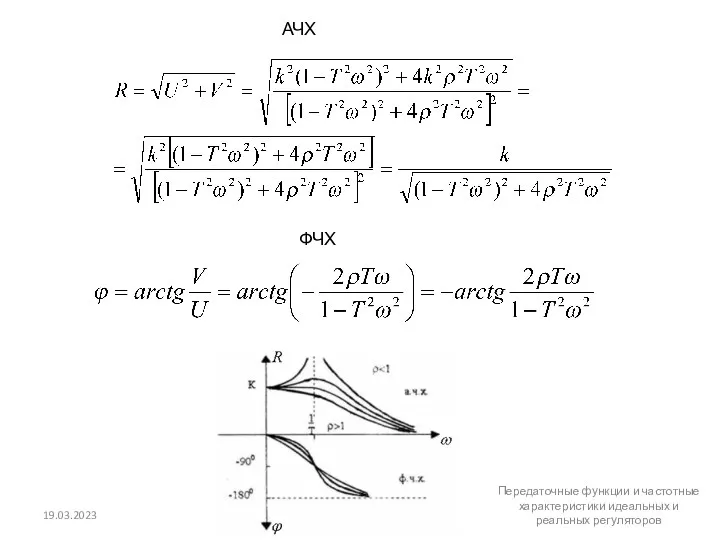
АЧХ
ФЧХ
19.03.2023
Передаточные функции и частотные характеристики идеальных и реальных регуляторов
АЧХ
ФЧХ
19.03.2023
Передаточные функции и частотные характеристики идеальных и реальных регуляторов
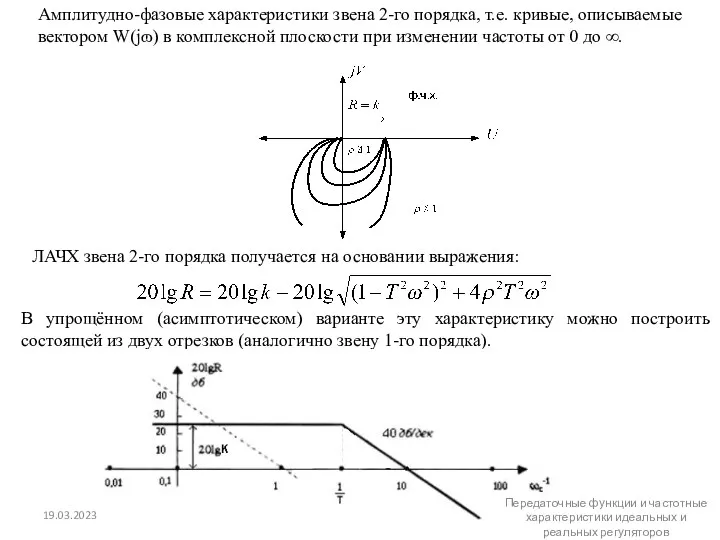
Амплитудно-фазовые характеристики звена 2-го порядка, т.е. кривые, описываемые вектором W(jɷ) в
Амплитудно-фазовые характеристики звена 2-го порядка, т.е. кривые, описываемые вектором W(jɷ) в
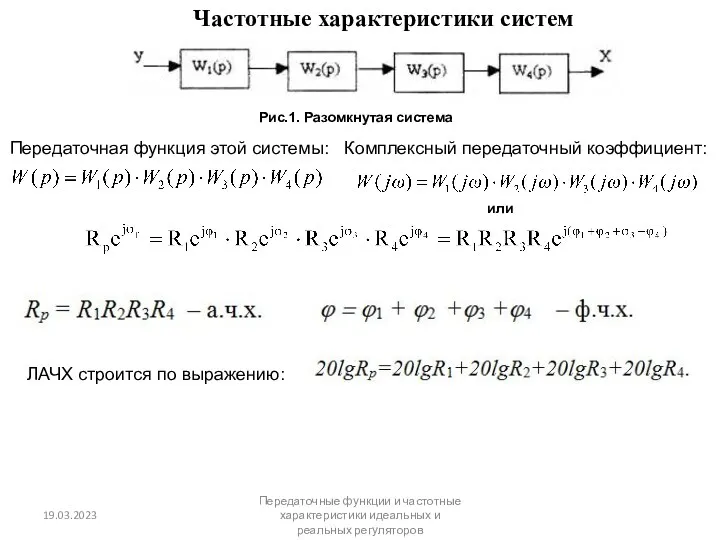
Частотные характеристики систем
Рис.1. Разомкнутая система
Передаточная функция этой системы:
Комплексный передаточный коэффициент:
или
ЛАЧХ строится
Частотные характеристики систем
Рис.1. Разомкнутая система
Передаточная функция этой системы:
Комплексный передаточный коэффициент:
или
ЛАЧХ строится
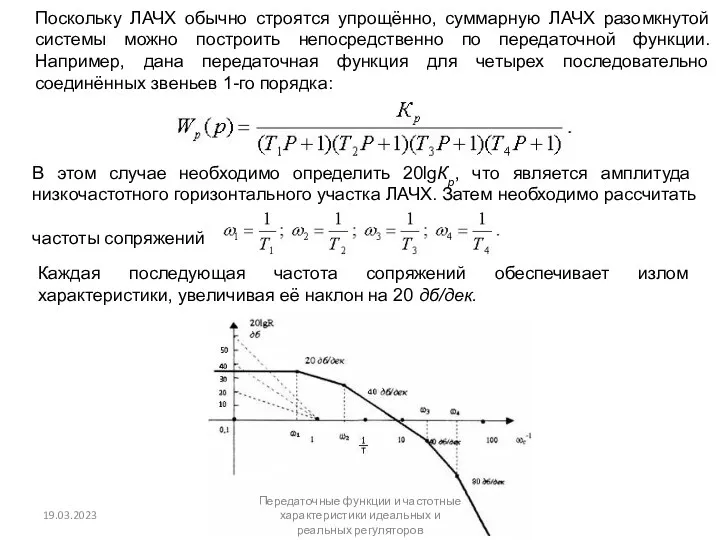
Поскольку ЛАЧХ обычно строятся упрощённо, суммарную ЛАЧХ разомкнутой системы можно построить
Поскольку ЛАЧХ обычно строятся упрощённо, суммарную ЛАЧХ разомкнутой системы можно построить
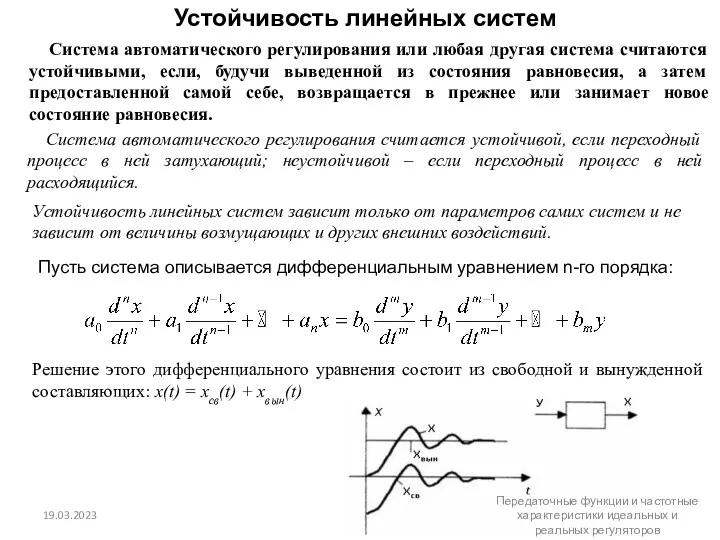
Устойчивость линейных систем
Система автоматического регулирования или любая другая система считаются устойчивыми,
Устойчивость линейных систем
Система автоматического регулирования или любая другая система считаются устойчивыми,
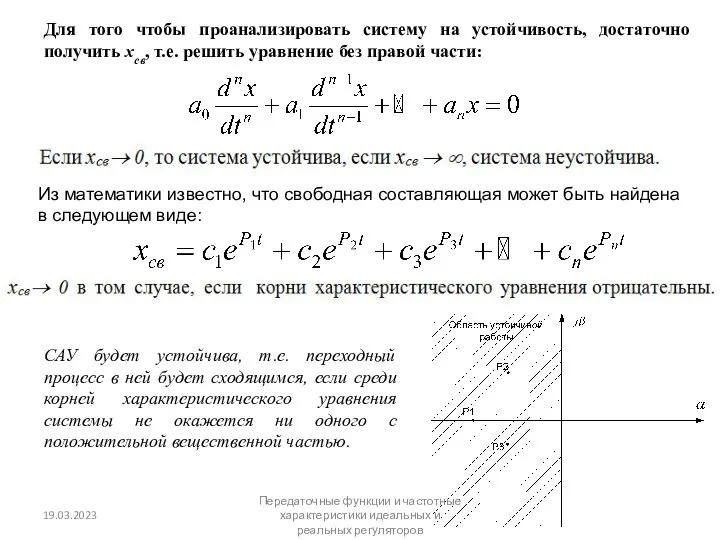
Для того чтобы проанализировать систему на устойчивость, достаточно получить хсв,
Для того чтобы проанализировать систему на устойчивость, достаточно получить хсв,

Алгебраические критерии устойчивости
Формулировка критерия Гурвица:
Для того чтобы все корни характеристического уравнения
Алгебраические критерии устойчивости
Формулировка критерия Гурвица:
Для того чтобы все корни характеристического уравнения
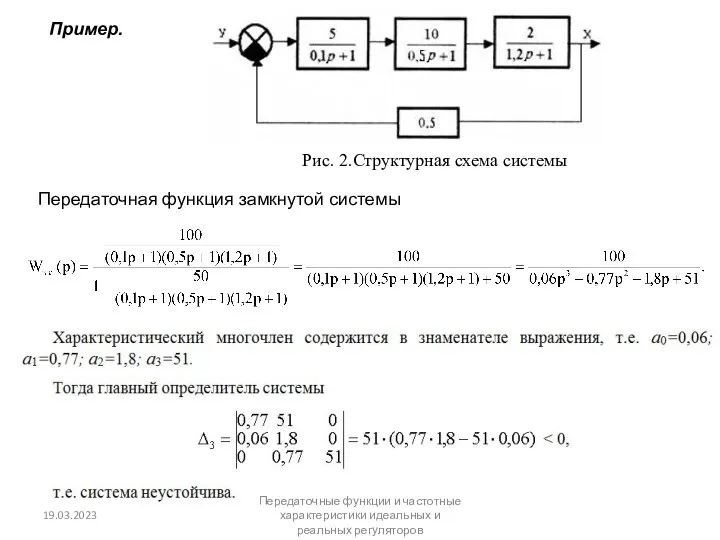
Пример.
Рис. 2.Структурная схема системы
Передаточная функция замкнутой системы
19.03.2023
Передаточные функции и частотные
Пример.
Рис. 2.Структурная схема системы
Передаточная функция замкнутой системы
19.03.2023
Передаточные функции и частотные
Геометрические критерии устойчивости
Критерий Михайлова
Пусть имеется передаточная функция замкнутой системы:
Подставив в выражение
Геометрические критерии устойчивости
Критерий Михайлова
Пусть имеется передаточная функция замкнутой системы:
Подставив в выражение
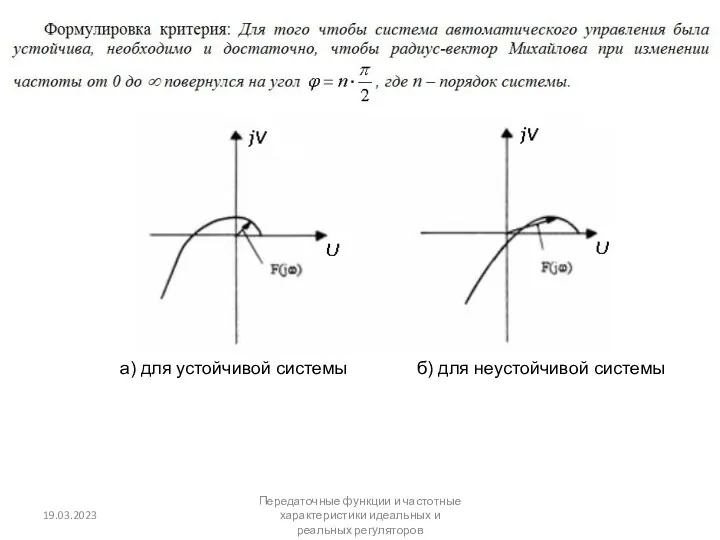
а) для устойчивой системы б) для неустойчивой системы
19.03.2023
Передаточные функции и частотные
а) для устойчивой системы б) для неустойчивой системы
19.03.2023
Передаточные функции и частотные
Критерий Найквиста
Для того чтобы замкнутая САР была устойчива, необходимо и достаточно,
Критерий Найквиста
Для того чтобы замкнутая САР была устойчива, необходимо и достаточно,
а) для устойчивой системы б) для неустойчивой системы
19.03.2023
Передаточные функции и частотные
а) для устойчивой системы б) для неустойчивой системы
19.03.2023
Передаточные функции и частотные

Логарифмический критерий устойчивости
Позволяет судить об устойчивости замкнутой САР по логарифмическим амплитудно-частотной
Логарифмический критерий устойчивости
Позволяет судить об устойчивости замкнутой САР по логарифмическим амплитудно-частотной
Построение областей устойчивости в пространстве
параметров систем (областей D-разбиения)
Если изменяется какой-либо
Построение областей устойчивости в пространстве
параметров систем (областей D-разбиения)
Если изменяется какой-либо
Построение областей D-разбиения в пространстве
одного (комплексного) параметра
Пусть имеется некоторый параметр
Построение областей D-разбиения в пространстве
одного (комплексного) параметра
Пусть имеется некоторый параметр
Подставляя в выражение
значения частоты от -∞ до +∞, получим границу областей
Подставляя в выражение
значения частоты от -∞ до +∞, получим границу областей
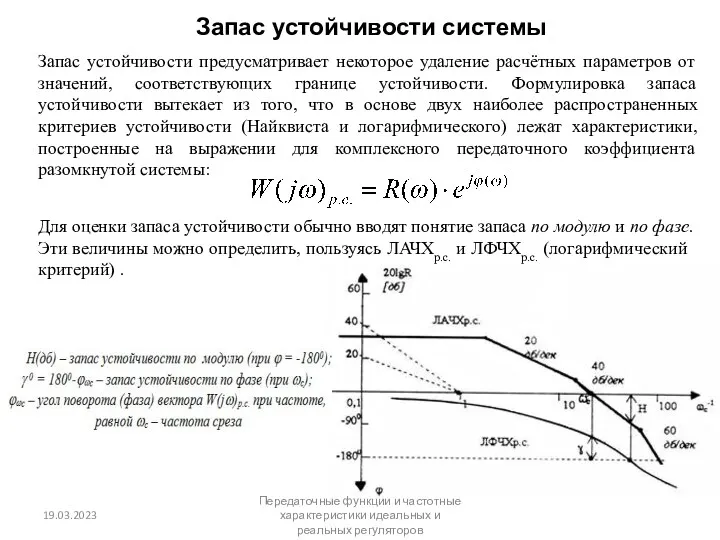
Запас устойчивости системы
Запас устойчивости предусматривает некоторое удаление расчётных параметров от значений,
Запас устойчивости системы
Запас устойчивости предусматривает некоторое удаление расчётных параметров от значений,
Качество переходного процесса в системах и методы его исследования
Качество процесса оценивается
Качество переходного процесса в системах и методы его исследования
Качество процесса оценивается
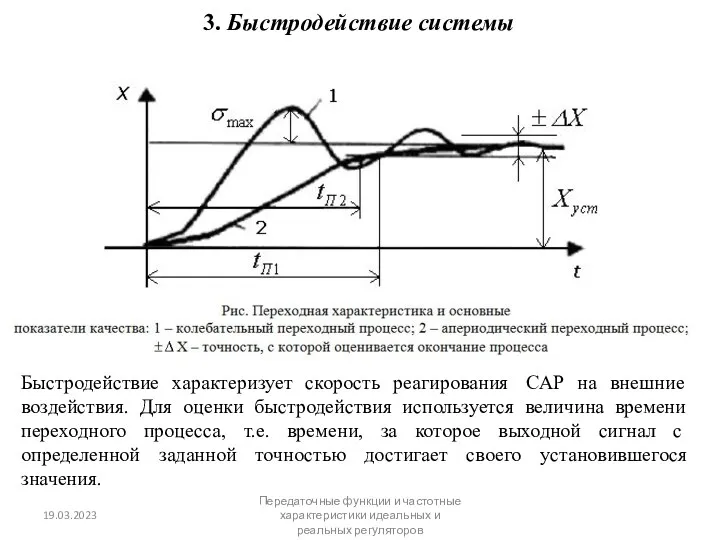
3. Быстродействие системы
Быстродействие характеризует скорость реагирования САР на внешние воздействия. Для
3. Быстродействие системы
Быстродействие характеризует скорость реагирования САР на внешние воздействия. Для
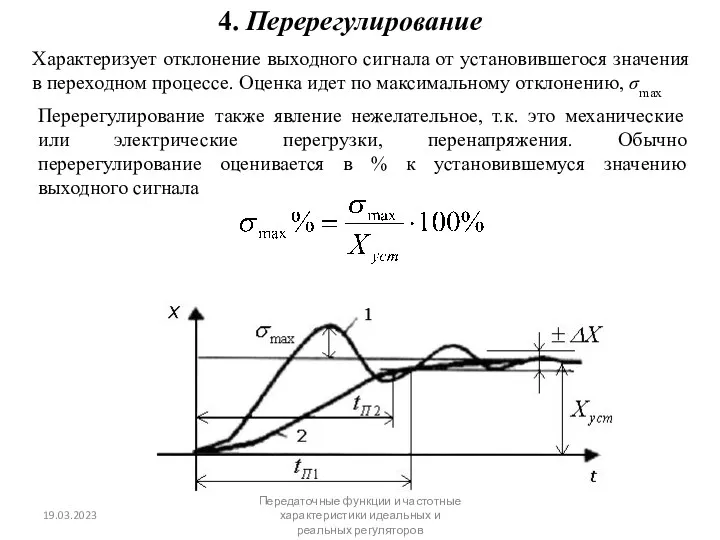
4. Перерегулирование
Характеризует отклонение выходного сигнала от установившегося значения в переходном процессе.
4. Перерегулирование
Характеризует отклонение выходного сигнала от установившегося значения в переходном процессе.
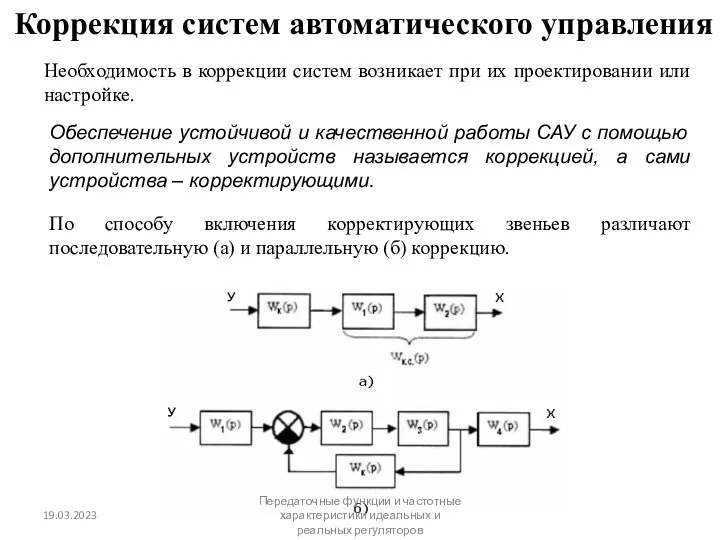
Коррекция систем автоматического управления
Необходимость в коррекции систем возникает при их проектировании
Коррекция систем автоматического управления
Необходимость в коррекции систем возникает при их проектировании
.
Задача синтеза корректирующего звена по заданным показателям качества решается в следующей
.
Задача синтеза корректирующего звена по заданным показателям качества решается в следующей
Синтез последовательного корректирующего звена методом ЛАЧХ
Передаточная функция скорректированной (желаемой) системы в
Синтез последовательного корректирующего звена методом ЛАЧХ
Передаточная функция скорректированной (желаемой) системы в
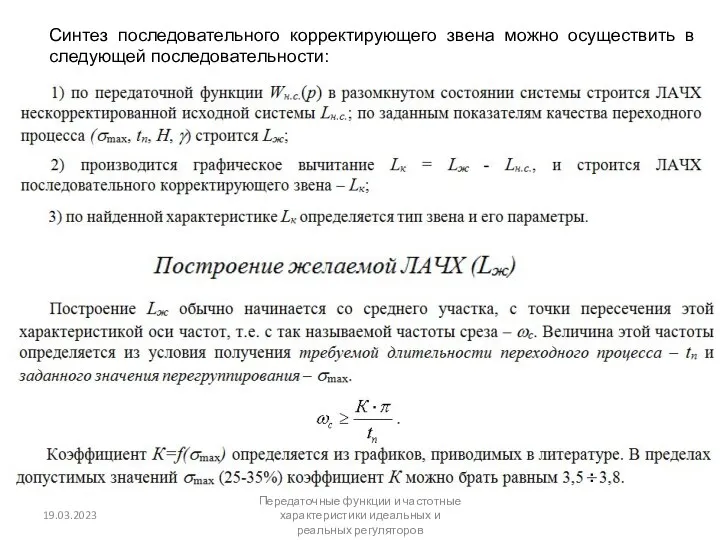
Синтез последовательного корректирующего звена можно осуществить в следующей последовательности:
19.03.2023
Передаточные функции и
Синтез последовательного корректирующего звена можно осуществить в следующей последовательности:
19.03.2023
Передаточные функции и
19.03.2023
Передаточные функции и частотные характеристики идеальных и реальных регуляторов
19.03.2023
Передаточные функции и частотные характеристики идеальных и реальных регуляторов
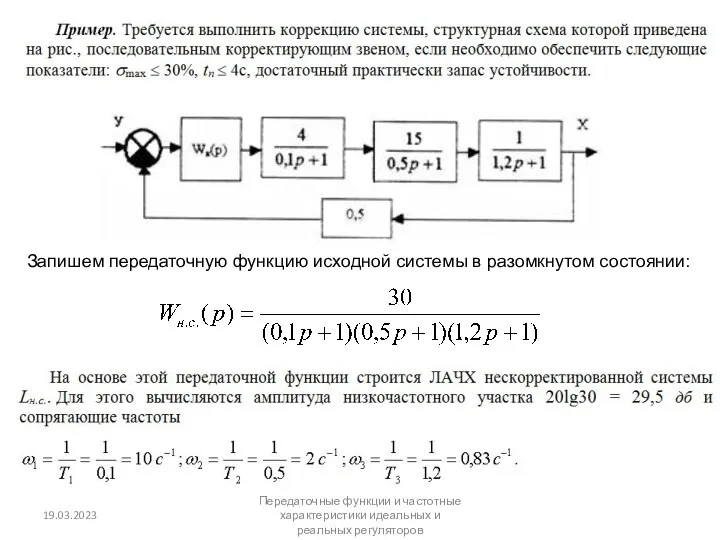
Запишем передаточную функцию исходной системы в разомкнутом состоянии:
19.03.2023
Передаточные функции и частотные
Запишем передаточную функцию исходной системы в разомкнутом состоянии:
19.03.2023
Передаточные функции и частотные
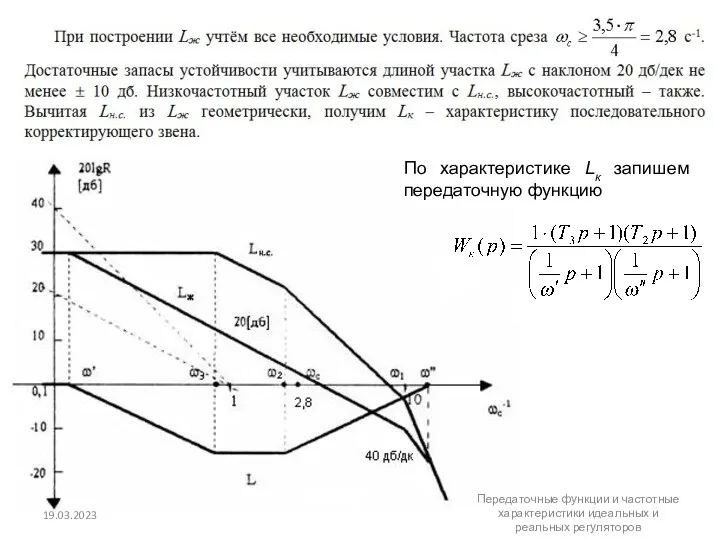
По характеристике Lк запишем передаточную функцию
19.03.2023
Передаточные функции и частотные характеристики идеальных
По характеристике Lк запишем передаточную функцию
19.03.2023
Передаточные функции и частотные характеристики идеальных
Самостоятельная работа
Нарисовать график устойчивости Найквиста.
Нарисовать график перерегулирования.
19.03.2023
Передаточные функции и частотные
Самостоятельная работа
Нарисовать график устойчивости Найквиста.
Нарисовать график перерегулирования.
19.03.2023
Передаточные функции и частотные
 Желідегі дистанциялық қорғаныс
Желідегі дистанциялық қорғаныс Рафінування металів
Рафінування металів Взаємодія тіл. Імпульс. Закон збереження імпульсу
Взаємодія тіл. Імпульс. Закон збереження імпульсу Силы в природе. Сила тяжести
Силы в природе. Сила тяжести Техническое обслуживание и текущий ремонт ходовой части
Техническое обслуживание и текущий ремонт ходовой части Итоговый урок, физика 8 класс
Итоговый урок, физика 8 класс Тепловые явления. Обобщающий урок по физике. Урок-зачёт. 8 класс
Тепловые явления. Обобщающий урок по физике. Урок-зачёт. 8 класс Строительная механика. Статически определимые плоские фермы
Строительная механика. Статически определимые плоские фермы Расчет количества теплоты при нагревании тела и охлаждении
Расчет количества теплоты при нагревании тела и охлаждении Технология ремонта боковой рамы тележки
Технология ремонта боковой рамы тележки Презентация к уроку физики в 7 классе Вес воздуха. Атмосферное давление
Презентация к уроку физики в 7 классе Вес воздуха. Атмосферное давление Типовые схемные решения объемных гидроприводов
Типовые схемные решения объемных гидроприводов Блочно- модульное планирование материала по физике.
Блочно- модульное планирование материала по физике. Диагностика технического состояния системы охлаждения двигателя автомобиля КамАЗ-5320
Диагностика технического состояния системы охлаждения двигателя автомобиля КамАЗ-5320 Гидросистема. Курс обучения механиков. Тормозная система. Уровень II
Гидросистема. Курс обучения механиков. Тормозная система. Уровень II Проектирование поста восстановления лакокрасочного покрытия легковых автомобилей в условиях предприятия ИП Фёдоров С.А.
Проектирование поста восстановления лакокрасочного покрытия легковых автомобилей в условиях предприятия ИП Фёдоров С.А. Такты работы ДВС, сгорание+расширение (часть 2). Тема 4
Такты работы ДВС, сгорание+расширение (часть 2). Тема 4 Работа и мощность электрического тока. Закон Джоуля - Ленца
Работа и мощность электрического тока. Закон Джоуля - Ленца ЕГЭ Проверочный тест по молекулярной физике и термодинамике
ЕГЭ Проверочный тест по молекулярной физике и термодинамике Условные расчеты на прочность
Условные расчеты на прочность Напруженість електричного поля. Силові лінії електричного поля. Накладання електричних полів. Електричне поле точкових зарядів
Напруженість електричного поля. Силові лінії електричного поля. Накладання електричних полів. Електричне поле точкових зарядів Bajaj intracity. Время для новых возможностей
Bajaj intracity. Время для новых возможностей Напряженность электрического поля. Принцип суперпозиции полей
Напряженность электрического поля. Принцип суперпозиции полей Дыбыс, кең мағынасында
Дыбыс, кең мағынасында Методическая разработка урока Плотность вещества
Методическая разработка урока Плотность вещества Кинематика тела. Лекция 7
Кинематика тела. Лекция 7 Физика на кухне
Физика на кухне Mass spectrometry
Mass spectrometry